ел
со со
00
Изобретение относится к иэмерн- тельной технике
Цель изобретения - повышение точности определения углового положения вала при увеличении скорости вращения вала„
На чертеже представлена структурная схема датчикас Датчик содержит Генератор 1 импульсов, первый счат- , |1ик 2, формирователь 3 опорного сиг- iiana, фазовращатель 4, нуль-орган 5, йервый регистр 6, ключ 7, второй счетчик 8, второй регистр 9, форми- рователь 10 задержанных импульсов, триггер 11, третий регистр 12, сумматор 13, элемент И 14, третий счетчик 15, последовательный сумматор 16,
Датчик углового положения и скорости вращения вала работает следующим
рбразоМо
Первый счетчик 2 выполняет функцию деления частоты генератора 1 импульсов, Формирователь 3 опорных сигналов вырабатывает из выходных периода- ческих сигналов первого счетчика два опорных напряжения фазовращателя 4 с частотой р. Нуль-орган 5 формирует из выходных синусоидальных сиг- ..налов фазовращателя 4 прямоугольные ;периодические сигналы, по фронту кот рых осуществляется запись кода перво счетчика 2 первый регистр 6 В последнем фиксируется код текущего углового положения вала
V(fu 4). f - частота, следования импульсов
генератора 1;
Е - символ округления до меньшего целого (отбрасывания остатка), для упрощения его опускают; фазовый интервал
t ,t)4f/2.
(4)
гдеТй 1/Е.
Второй .счетчик 8 вместе с ключом 7, триггером 11 и регистром 9 образуют блок вычисления частоты вращения, определяемой по разности периодов опорного и выходного напряжений фазовращателя 4«По фронту выходного сигнала нуль-органа 5 триггер 11 переходит в нулевое состояние.и, воздействуя на управляющий вход ключа 7, прекращает поступление импульсов ге- нератЪра 1 на счетный вход счетчика 8. Фронт выходного сигнала нуль
органа 5 запускает также формирова- . тель 10, который выдает на своем первом выходе импульс через время, достаточное для заверщения переносов в счетчик 8о По этому импульсу происходит перезапись кода счетчика в регистр 9 о Второй импульс формирова- тапя 10, воздействуя на входы предус0 тановки счетчика 8, осуществляет запись в него кода, соответствующего промежутку времени между фронтом импульса нуль-органа 5 и началом импульса на третьем выходе формировате5 ля 10 о Этот импульс поступает на установочный вход триггера 11 и переводит его в единичное состояние, после чего открывается ключ 7 и импульсы генератора 1 вновь поступают на
0 счетный вход счетчика 8
Таким образом, в регистре 9 в начале каждого последующего периода фиксируется код разности iT T-T j, опре- 25 деленный в предыдущем периоде выходного сигнала нуль-органа 5. Разрядность второго счетчика 8 равна разрядности первого счетчика 2 плюс дополнительный знаковый разряд, используемый для 3Q определения направления вращения Последовательно соединенные третий регистр 12, сумматор 13, элемент И 14, третий счетчик 15 образуют блок вычисления поправки углового положения вала На входы первого слагаемого сумматора 13 с вы-.ода регистра 9 поступает код отклонения частоты сигнала, пропорциональный отклонению периода ,|i,T. Сумматор 13 и третий регистр 2 40 образуют накапливающий сумматор, следовательно, при каждом поступлении . тактирующего импульса с выхода промежуточного разряда первого счетчика 2 на выходах сумматора 13 рсуществля- 45 ется накопление величины, пропорциональной отклонению периода выходного напряжения фазовращателя. Выход разряда переполнения сумматора 13 подключен к входу схемы И 14, управляя 50 поступлением тактирующих импульсов с выхода промежуточного разряда чика 2 на счетный вход счетчика 15 Третий счетчик 15 установлен в нулевое состояние старщим разрядом счетчика 2, поэтому к моменту изменения уровня сигнала на выходе нуль-органа на выходах третьего регистра 12 и счетчика 15 фиксируется количество импульсов
N,
Nn-fn-tM
n
159 (5)
СЧ
де n
СЦ
емкость счетчика 2, используемая для формирования тактирующих импульсов накапливающего суммматорво Емкости регистров 9 и 12 и счетика 15 равны Пр, поэтому в счетчие 15 фиксируется количество импульов
N«- fu- tu
N
&(f
n
cu
n
p
(6)
При выполнении условия
TO
(7)
выражение (6) приводится к виду fu-tu
N
N,
(8)
tu-fu4
N«/N,
(9)
выралсе- .;
bf
Задержанный импульс с первого выхода формирователя 10 поступает на тактирующий вход последовательног сумматора 16, вызывая суммирование кодов сигналов, поступающих на его входы с выходов регистра 6 и счетчика 15о Кроме того, на знаковый разряд слагаемого поправки углового положения последовательного сумматора 16 поступает инверсный сигнал с выхода знакового разряда регистра 9 В результате.на выходе сумматора 16 фиксируется алгебраическая сумма (с учетом знака),
N eN,-N.,-f.
Z Ч fiif и (4 Ч
С учетом соотношения 4 ние (9) может быть оценено
N.fy-l| /2lr l-(iT/T) (10)
Из анализа вьфажения (10) следует что относительная погрешность оценки углового положения вала пропорциональна отношению ().
99778 -
10
о
5
20
25
30
, 35
40
р м у л ь изобретения Датчик углового положения и скорости вращения вала по ав- csi № 934382, отличающийся тем, что, с целью повышения точности определения углового положения вала, в него дополнительно введены третий регистр, сумматор, элемент И, третий счетчик и последовательный cy мaтop, причем к младшим разрядам второго регистра подключены входы первого слагаемого сумматора, выходь которого подключены к информационным входам третьего регистра, выход которого соединен с входом второго слагаемого сумматора, выход разряда переполнения сумматора подключен к первому входу элемента И, второй вход которого соединен с входом разрешения записи третьего регистра и с выходом промежуточного разряда первого счетчика, а выход элемента И соединен со счетным входом третьего счетчика, вход сброса которого соединен с выходом первого счетчика, а выход третьего счетчика соединен с информационным входом первого слагаемого последовательного сумматора, знаковый вход первого слагаемого которого подключен к выходу знакового разряда второго регистра, информационный вход второго слагаемого последовательного сумматора под-: кЛючен к выходу первого регист- . ра, а тактируемый вход последовательного сумматора подключен к первому выходу формирователя задержанных импульсов, причем выход ..второго ре- гистра является выходом кода скорости вращения вала, выход последовательно- то сумматора является выходом кода углового положения о
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1615619A2 |
| Датчик углового положения,скорости и ускорения вращения вала | 1981 |
|
SU994990A2 |
| Датчик углового положения и скорости вращения вала | 1989 |
|
SU1695233A2 |
| Датчик углового положения и скорости вращения вала | 1981 |
|
SU994988A2 |
| Датчик углового положения и скорости вращения вала | 1982 |
|
SU1053006A2 |
| Датчик углового положения и скорости вращения вала | 1981 |
|
SU1008659A2 |
| Датчик углового положения и скорости вращения вала | 1980 |
|
SU934382A1 |
| Датчик углового положения, скорости и ускорения вращения вала | 1982 |
|
SU1107055A2 |
| Датчик углового положения и скорости вращения вала | 1985 |
|
SU1278718A1 |
| Преобразователь угла поворота и скорости вращения вала в код | 1990 |
|
SU1716602A1 |
Изобретение относится к измерительной технике, может быть использовано в качестве датчика углового положения и мгновенных скоростей вращения вала в точных цифровых системах автоматического управления и является усовершенствованием изображения по авт. св. N 934382. С целью повышения точности определения углового положения вала при увеличении скорости вращения вала датчик снабжен третьим регистром 12, сумматором 13, элементом И 14, третьим счетчиком 15 и последовательным сумматором 16, что позволяет учитывать скорость вращения вала, и в конечном итоге, уменьшить влияние скорости вращения вала на результат определения углового положения вала. 1 ил.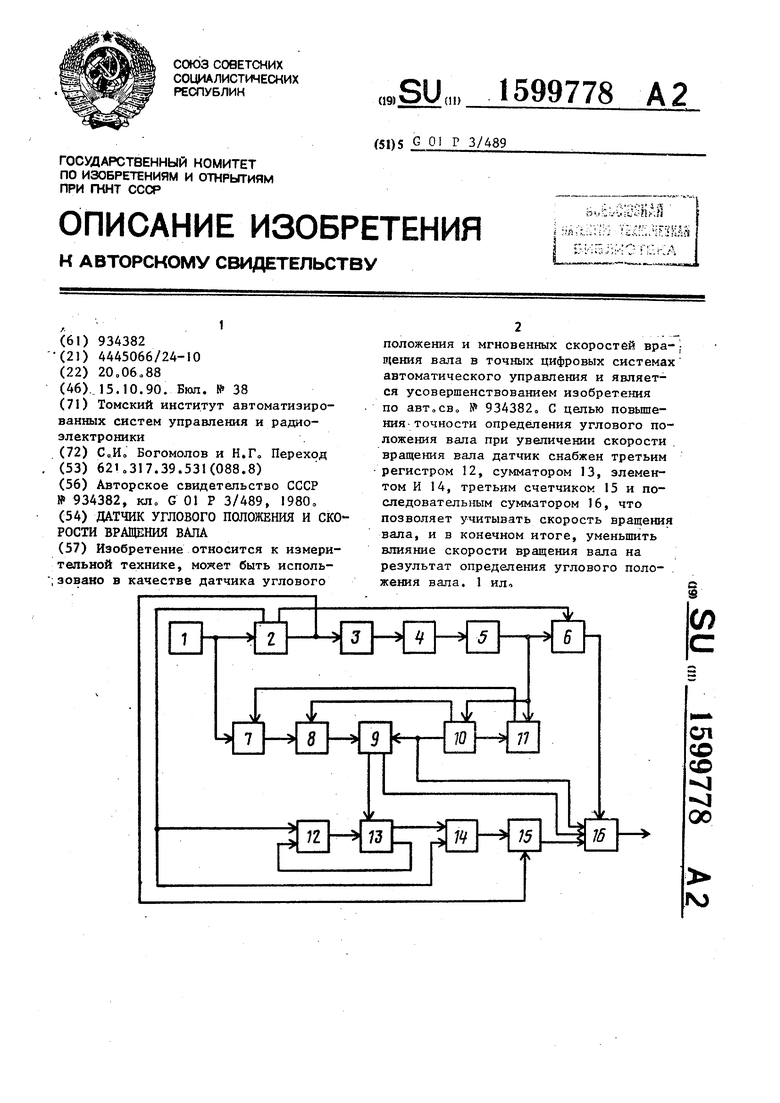
| Датчик углового положения и скорости вращения вала | 1980 |
|
SU934382A1 |
