(54) ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ, СКОЮСТИ И УСКОРЕНИЯ ВРАЩЕНИЯ ВАЛА
1
I Изобретение относится к измерительной технике и может быть использовано в качестве датчика углового положения и мгновенной скорости и ускорения вращения вала в точных цифровых системах автоматического управления и регулирования.
По основному авт. св. № 934382,, известен датчик углового положения, скорости вращения вала, содержащий генератор импульсов, первый и второй счетчики, формирова- . тель опорных сигналов, фазовращатель, нульорган, первый и второй регистры, а также управляемый ключ, формирователь задержанных импульсов и дополнительный триггер. Выход генератора импульсов подключен непосредственно к первому счетчику ичерез ключ, управляющий вход которого соединен с выходом дополнительного триггера, - к второму счетчику. Нуль-орган через последовательно соединенные фазовращатель и (Ьорми рователь опорных сигналов подключен к выходу старшего разряда первого счетчика, выходы всех разрядов которого соединены с входами первого регистра, первый вход ,
дополнительного триггера и вход формирователя задержанных импульсов соединены с выходом нуль-органа. Первый, второй и третий выходы формирователя задержанных импульсов соединены соответственно с входом разрчщения записи второго регистра, входом сброса второго счетчика и вторым входом дополнительного триггера. Выходы счетных триггеров второго счетчика соединены с информационными входами второго регистра 1 ,
10
Недостаток известного устройства заключается в том, что не обеспечивается одновременное измерение ускорения вращения вала.
Целью изобретения является расширение функциональных возможностей датчика за счет
15 измерения ускорения вращения вала.
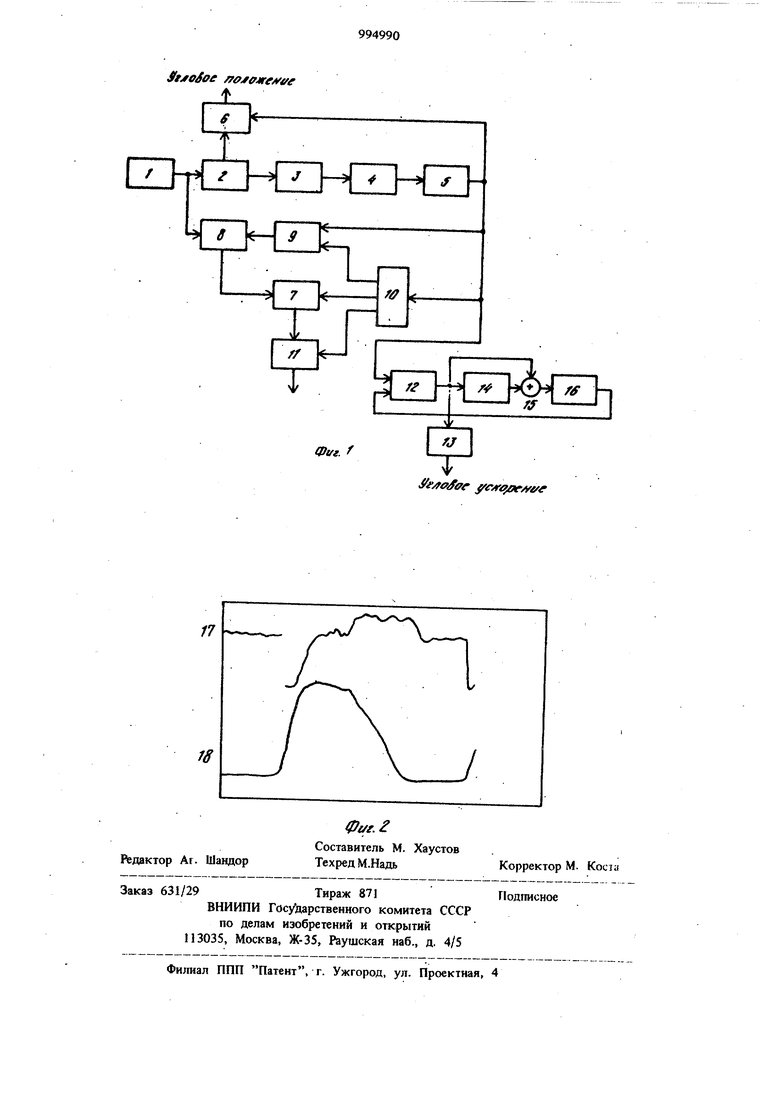
Указанная цель достигается тем, что в датчик введены фильтр нижних частот и последовательно соединенные фазовый детектор, 2JJ интегратор, суммирующий элемент к управляемый генератор, причем выход нуль-органа подключен, к первому входу фазового детектора, второй вход которого соединен с выходом управляемого генератора, а вход фильт399pa ниж)гих частот подключен к входу интегратора и к Второму входу суммирующего элемента. На фиг. 1 изображена структурная схема датчика углового положения, скорости и ускорения вращения; на фиг. 2 - осциллогра мы сигналов скорости и ускорения, иллюстрирующие работу датчика. Датчик содержит генератор 1 импульсов, выход которого подключен к счетному выход первого счетчика 2, выполненного на триггерах. Выход старшего разряда счетчика 2 через формирователь 3 опорных сигналов соединен с входом фазовращателя 4, подключенного своим выходом к входу нуль-органа 5. Выход нуль-органа 5 соединен с входом разрешения записи первого регистра 6, информационные входы которого подключены к вы ходам соответствующих триггеров счетчика 2. Выход генератора 1 импульсов соединен также со счетным входом второго счетчика 7 через ключ 8, управляющий вход которого соединен с выходом дополнительного триггера 9. Вход сброса триггера 9 соединен с выходом нуоргана 5. Выход нуль-органа 5 соединен также с входом формирователя 10 задержанных импульсов, первый выход которого подключен к входу разреще1шя записи второго регистра 1 Информационные входы регистра 11 соединены с соответствующими выходами триггеров второго счетчика 7, вход предустановки которого подключен к второму выходу формирователя 10 задержанных импульсов. Третий выход формирователя 10 соединен с вхо дом установки в единичное состояние дополнительного триггера 9. Выход нуль-органа 5 соединен также с первым входом фазового детектора 12, выход которого подключен к входу фильтра 13 нижних частот и входу интегратора 14. Выход интегратора 14 подключен к входу суммирующего элемента 15, другой вход которого подключен к выходу фазового детектора 12. Выход суммирующего элемента 15 соединен с входом управляемого генератора 16, выход которого соединен с вторым входом фазового детектора. Датчик работает следующим образом. Первый счетчик 2 выполняет Аункцию делителя частоты генератора 1. Формирователь 3 вырабатывает из выходных периодичес ких сигналов первого счетчика 2 опорные напряжения фазовращателя 4. Нуль-орган 5 фор мирует из выходных синусоидальных сигналов фазовращателя 4 прямоугольные периодически сигналы, по переднему фронту которых осуществляется запись кода первого счетчика 2 первый регистр 6. В первом регистре 6 фиксируется код текущего углового положения вала. Второй счетчик 7, имеющий разрядность, равную разрядности первого счетчика 2, плюс дополнительный знаковый разряд, вместе с ключом 8, дополнительным триггером 9, формирователем 10 задержанных импульсов и регистром 11 образуют блок вычисления частоты вращения, причем вычисление кода скорости заменено вычислением чода приращения л Т периода Т выходного сигнала фазовращателя по отнощению к периоду TQ опорного сигнала фазовращателя. По переднему фронту выходного сигнала нуль-органа 5 переходит в нулевое состояние дополнительный триггер 9 и одновременно запускается формирователь Ю задержанных импульсов. Сигнал с выхода триггера 9, воздействуя на управляющий вход ключа 8, прекращает поступление импульсов генератора 1 на счетный вход второго счетчика. 7. Через время, достаточное для переноса в счетчике 7, вырабатывается первый импульс формирователя 10, который поступает ка вход разрещения записи второго регистра 11 и осуществляет запись кода Д Т из счетчика 7 во второй регистр 11. Второй импульс формирователя 10, воздействуя на входы предустановки второго счетчика 7, осуществляет запись в счетчик 7 кода, соответствующего промежутку времени между появлением первого и третьего выходных импульсов формирователя 10. Импульс с третьего выхода формирователя 10 переведет . в единичное состояние триггер 9, в результате чего будет открыт ключ В и сигналы генератора 1 вновь поступят на вход счетчика 7. Поскольку козффищ1енты пересчета первого счетчика 2 и второго счетчика 7 равны, то в конце каждого периода выходного сигнала нуль-органа 5 в регистре 11 будет зафиксирован либо прямой код Л Т, если Т Tj, ,либо дополнительный код Д Т. если Т TQ. Цепь фазовой автоподстройки частоты содержащая фазовый детектор 12, интегратор 14, суммирующий элемент 15 и управляемый генератор 16, совместно с фильтром 13 нижних частот образует блок вычисления ускорения. На первый вход фазового детектора 12 поступают сигналы с выхода нуль-органа 5, имеющие частоту F равную F FO ± РВР где FQ - частота опорного сигнала фазовращателя;F - частота вращения вала фазовращателя. Второй вход фазового детектора 12 соединен с выходом управляемого генср.чюри 16, частота которото равна F при нулевом значении напряжения на управляющем входе. Фазовый детектор 12 преобразует разность фаз сигналов на его входах в пропорциональное этой разности значение напряжения на его выходе. Выходной сигнал фазового детектора 12, после интегрирования интегратором 14, воздействует на управляющий вход генератора 16, удерживая разность фаз сигналов на входах фазового детектора 12 на уровне, близком к нулевому. Следовательно, и частота управляемого генератора 16 с некоторым рассогласованием рав на .выходной частоте нуль-органа 5. Экспериме тально выяснено, что дополнительная изодром ная связь с выхода фазового детектора 12 на вход управляемого генератора 16 уменьшает рассогласование частот и увеличивает устойчивость цепи фазовой автоподстройки. Генератор 16 имеет линейную зависимость выходной частоты от управляющего напряжения. При изменении скорости вращении одновременно и пропорщюнально изменяется частота управляемого генератора 16 и выходное напряжение интегратора 14. Следовательно, входное напряжение интегратора 14, равное производной от выходного, равно с некоторым коэффициентом пропорциональности значению углового ускорения. На вход интегратора 14 поступают сигналы с выхода фазового детектора 12, в которых кроме низкочастотной составляющей ,пропорциональной ускорению вращения, присутствует высокочастотная составляющая с частотой входного сигнала. Фильтр. 13 нижних частот выделяет высокочастотную составляющую .входного сигнала интегратора 14, т. е. на выходе фильтра 13 нижних частот образуется сигнал, пропорциональный ускорению вращения. Фазовращатель соединен с валом электродвигателя через понижающий редуктор. На фиг. 2 приведены осциллограммы напряжений с выхода блока определения ускорения (диаграмма 17) и выхода цифро-аналогового преобразователя, подключенного к каналу определения скорости вращения (диаграмма 18). Осциллограммы иллюстрируют процессы разгона и торможения двигателя, т. е. подтверждают возможность получения информации об ускорении вращения вала. Формула изобретения Датчик углового положения, скорости и ускорения враще1шя вала по авт. св. № 934382, отличающийся тем, что, с целью расширения функциональнь1х возможностей за счет измерения ускорения вращения вала, в датчик введены фильтр нижних частот и последовательно соединенные фазовый детектор, интегратор, суммирующий элемент и управляемый генератор, причем выход нуль-органа подключен к первому входу фазового детектора, второй вход которого соединен с выходом управляемого генератора, а вход фильтра нижних частот подключен к входу интегратора и к второму входу суммирующего элемента. Источники информации, принятые во внимание при экспертизе К Авторское свидетельство СССР № 934382, кл. G 01 Р 3/489, 17.07.80 (прототип).
ytjtoSoe /7o ffJirf/ fff
JL

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углового положения и скорости вращения вала | 1981 |
|
SU1008659A2 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1101740A1 |
| Датчик углового положения, скорости и ускорения вращения вала | 1982 |
|
SU1107055A2 |
| Датчик углового положения,скорости и ускорения вращения вала | 1983 |
|
SU1213417A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1615619A2 |
| Датчик углового положения и скорости вращения вала | 1981 |
|
SU994988A2 |
| Датчик углового положения и скорости вращения вала | 1988 |
|
SU1599778A2 |
| Датчик углового положения и скорости вращения вала | 1989 |
|
SU1695233A2 |
| Датчик углового положения и скорости вращения вала | 1982 |
|
SU1053006A2 |
| Цифровой тахометр | 1989 |
|
SU1615615A1 |
fffAff fff /««9« / r
