Изобретение относится к электроизмерительной и вычислительной технике и может быть использовано при проверке аналого-цифровых преобразователей (АЦП) в режиме изменяющегося входного сигнала.
Известен способ определения погрешности АЦП в динамическом режиме с использованием образцового цифроаналогового преобразователя (ЦАП). Погрешность поверяемого АЦП определяют как разность между значением входного эталонного изменяющегося сигнала и результатом преобразования АЦП, а входной сигнал, например синусоиду, формируют с помощью ЦАП. Значение входного сигнала в этом случае в любой момент времени заранее известно tl
Недостатком данного способа является невозможность получения эталонного сигнала с большой скоростью изменения из-за ограниченного быстродействия ЦАП.-
Известен способ определения погрешности аналого-цифровых преобразователей в динамическом режиме путем преобразования входного изменяющегося сигнала в поверяемой точке шкалы преобразования и вычитания результата преобразования из кода, соответствующего поверяемой точке шкалы преобразования, причем запуск преобразователя производят в моменты прохождения входным линейно изменяющимся сигналом опорного уровня, а значения эталонной аналоговой величины определяют путем суммирования
10 значения опорного уровня и приращения входного сигнала за время цикла преобразования 2.
Однако данный способ не обеспечивает высокую точность вследствие погрешностей определения приращений
15 входного сигнала - погрииностей от нестабильности скорости изменения входного сигнала и от Heota6HnbHocTH времени цикла преобразования АЦП. Кроме того, способ не дает возможнос20ти работать со случайны л входным сигналом, так как в этом случае невозможно определение,приращения входного сигнала из-за его случайного характера, т.е. имеет ограниченные
25 функциональные возможности.
Цель изобретения - повыаение точг ности определения погрешности и расширение функциональных возможностей.
Поставленная цель достигается тем,
30 что схэгласно способу определения погрешности аналого-цифровых преобразователей в динамическом режиме путем преобразования входного изменяющегос сигнала в поверяемой точке шкалы преобразования, и вычитания результата преобразования изкода, соответствующего поверяемой точке шкалы преобразования , в соответствующей поверяемой точке формируют эталонный .говый сигнал, с пределами изменения, . меньшими статической погрешности
преобразования, и при вычитании используют результаты преобразования с входным изменяющимся сигналом, находящимся в указанных пределах
Способ осуществляют следующим
образом.
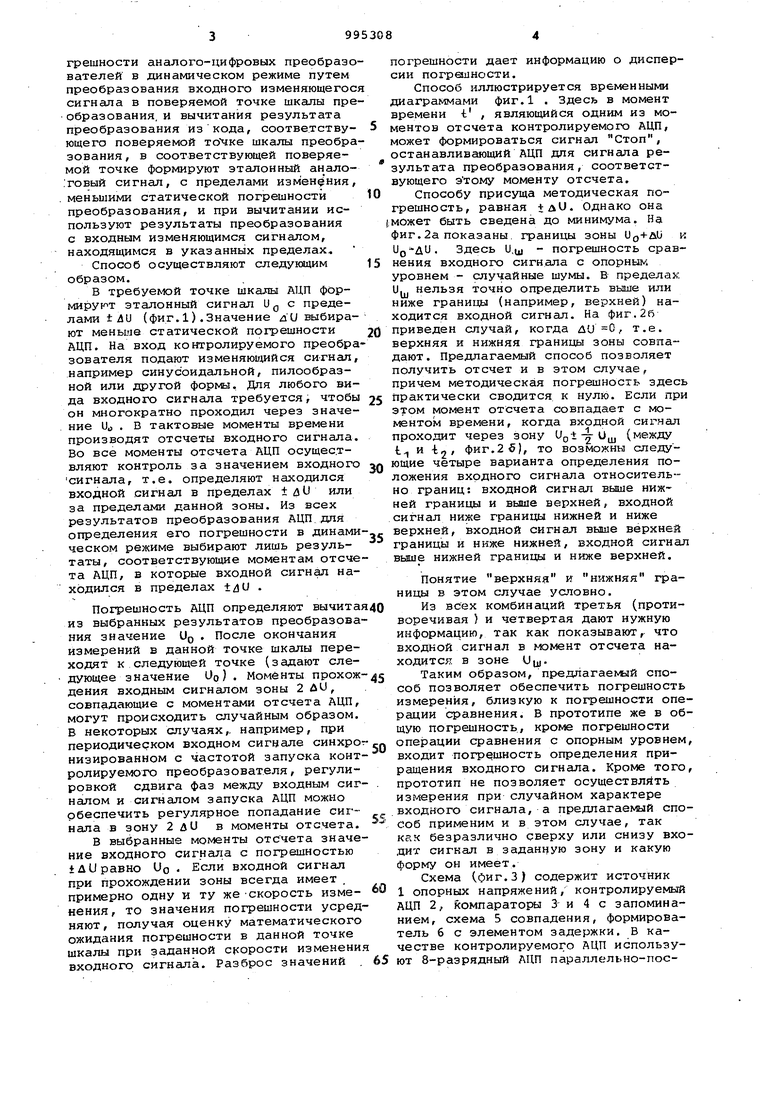
В требуемой точке шкалы АЦП формируют эталонный сигнал Ug с пределами t Ла (фиг.1) .Значение лУ выбирают меньше статической погрешности АЦП. На вход контролируемого преобразователя подают изменяющийся си-гнал, например синусоидальной, пилообразной или другой формы. Для любого вида входного сигнала требуется, чтобы он многократно проходил через значение Uo . В тактовые моменты времени производят отсчеты входного сигнала. Во все моменты отсчета АЦП осуществляют контроль за значением входного сигнала, т.е. определяют находился входной сигнал в пределах ± дУ или за пределами данной зоны. Из всех результатов преобразования АЦП для определения его погрешности в динами ческом режиме выбирают лишь результаты, соответствующие моментам отсчета АЦП, в которые входной сигнал находился в пределах .
Погрешность АЦП определяют вычита из выбранных результатов преобразования значение UQ . После окончания измерений в данной точке шкапы переходят к следующей точке (задают следующее значение UQ). Моменты ПрОХОЖ дения входным сигналом зоны 2 uU, совпадающие с моментами отсчета АЦП, могут происходить случайным образом. В некоторых случаях,, например, при периодическом входном сигнале синхрог низированном с частотой запуска контролируемого преобразователя, регулировкой сдвига фаз между входным сигналом и сигналом запуска АЦП можно обеспечить регулярное попадание сигнала в зону 2 дУ в моменты отсчета.
В выбранные моменты отсчета значение входного сигнала с погрешностью ди равно UQ . Если входной сигнал при прохождении зоны всегда имеет . примерно одну и ту же скорость изменения, то значения погрешности усредняют, получая оценку математического ожидания погрешности в данной точке шкалы при заданной скорости изменения входного сигнала. Разброс значений .
погрешности дает информацию о дисперсии погрешности.
Способ иллюстрируется временными диаграммами фиг.1 . Здесь в момент времени -t , являющийся одним из моментов отсчета контролируемого АЦП, может формироваться сигнал Стоп, останавливающий АЦП для сигнала результата преобразования, соответствующего этому моменту отсчета.
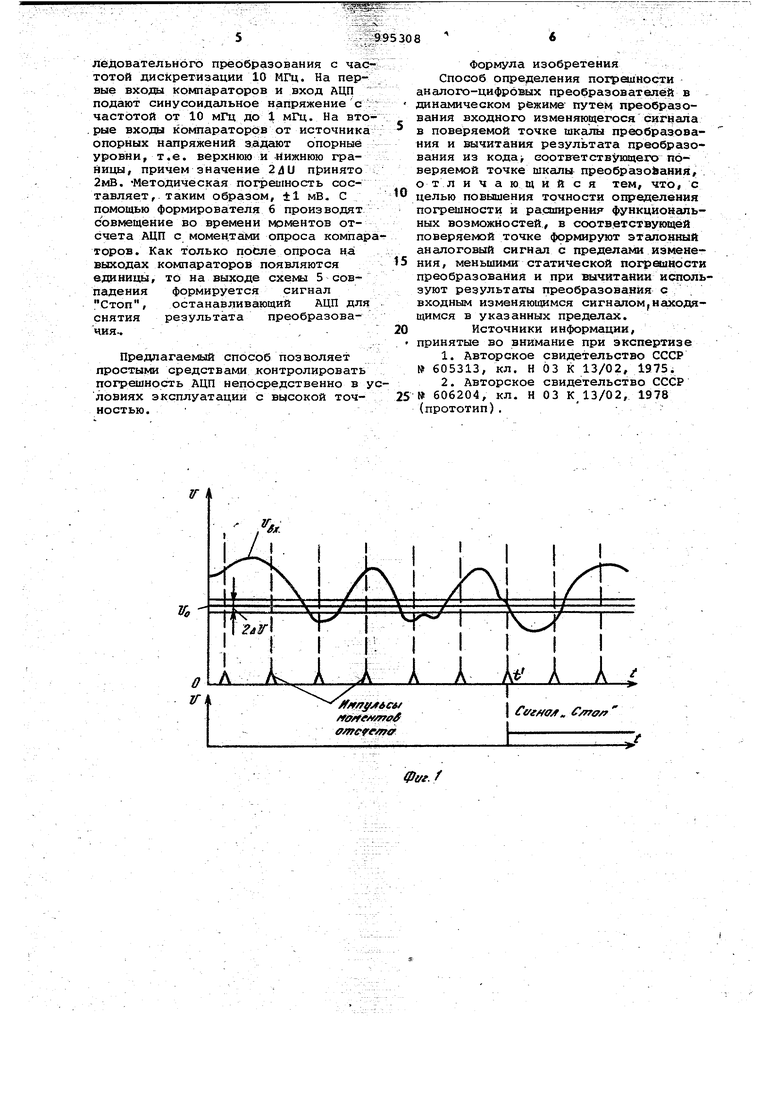
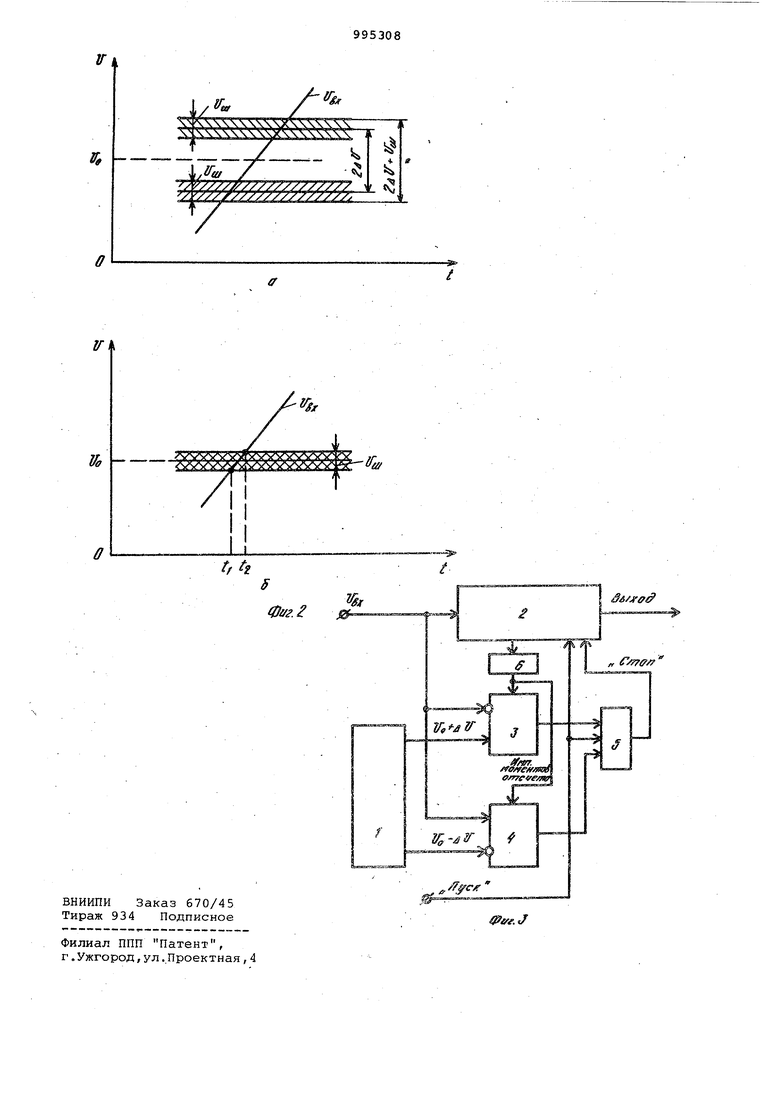
Способу присуща методическая погрешность, равная taU. Однако она 1:может быть сведена до минимума. На фиг.2а показаны, границы зоны UQ+UU и . Здесь и.ц) - погрешность сравнения входного сигнала с опорным уровнем - случайные шумы. В пределах нельзя точно определить выше или ниже гранихда (например, верхней) находится входной сигнал. На фиг.2б приведен случай, когда , т.е. верхняя и нижняя границы зоны совпадают. Предлагаемый способ позволяет получить отсчет и в этом случае, причем методическая погрешность здесь Практически сводится к нулю. Если при этом момент отсчета совпадает с моментом времени, когда входной сигнал проходит через зону (между t и -trt, фиг.2 5), то возможны следующие четыре варианта определения положения входного сигнала относительно границ: входной сигнал выше нижней границы и вьпяе верхней, входной сигнал ниже границы нижней и ниже верхней, входной сигнал выше верхней границы и ниже нижней, входной сигнал выше нижней границы и ниже верхней.
Понятие верхняя и нижняя границы в этом случае условно.
Из всех комбинаций третья (противоречивая ) и четвертая дают нужную информацию, так как показывают, что входной сигнал в момент отсчета находится в зоне Ущ.
Таким образом, предлагаемой способ позволяет обеспечить погрешность измерения, близкую к погрешности операции сравнения. В прототипе же в общую погрешность, кроме погрешности операции сравнения с опорным уровнем входит погрешность определения приращения входного сигнала. Кроме того прототип не позволяет осуществлять измерения при случайном характере .входного сигнала, а предлагаемый способ применим и в этом случае, так как безразлично сверху или снизу входит сигнал в заданную зону и какую форму он имеет.
Схема (.Оиг.З) содержит источник 1 опорных напряжений, контролируемый АЦП 2, компараторы 3- и 4 с запоминанием, схема 5 совпадения, формирователь 6 с элементом задержки. В качестве контролируемого АЦП используют 8-разрядный АЦП параллельно-последовательного преобразования с частотой дискретизации 10 МГц. На первые входы компараторов и вход АЦП подают синусоидальное напряжение с частотой от 10 мГц до 1 мГц. На вто, рые входы компараторов от источника опорных напряжений задают опорные уровни, т.е. верхнюю и нижнюю границы, причем значение 2&U принято 2мВ. -Методическая погрешность составляет, таким образом, ±1 мВ, С помощью формирователя 6 производят совмещение во времени моментов отсчета АЦП с моментами опроса компарторов. Как только после опроса на выходах компараторов появляются единицы, то на выходе схемы 5 совпадения формируется сигнал Стоп, останавливающий АЦП для снятия результата преобразования-.
Предлагаемый способ позволяет простыми средствами контролировать погрешность АЦП непосредственно в уловиях эксплуатации с высокой точностью.
Формула изобретения Способ определения погрешности аналого-цифровых преобразователей в динамическом режиме путем преобразования входно го из ме н яющегося сигц ал а в поверяемой точке шкалы преобразования и вычитания результата преобразования из кода соответствующего поверяемой точке шкалы преобразования, отличающийся тем, что, с целью повышения точности определения погрешности и расширения функциональных возможностей, в соотв.етствующёй поверяемой точке формируют эталонный аналоговый сигнал с пределами измене5 ния, меньшими статической погрешности преобразования и при вычитании используют результаты преобразования с входным изменяющимся сигналом,находящимся в указанных пределах.
0 Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 605313, кл. Н 03 К 13/02, 1975.
2.Авторское свидетельство СССР 5 606204, кл. Н 03 К 13/02, 1978
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированной поверки измерительных приборов | 1982 |
|
SU1051478A2 |
| Устройство для автоматического измерения динамических характеристик быстродействующих аналого-цифровых преобразователей | 1980 |
|
SU892705A1 |
| Устройство для автоматического измерения динамических характеристик быстродействующих аналого-цифровых преобразователей | 1985 |
|
SU1254580A2 |
| Устройство для измерения и контроля параметров аналого-цифровых преобразователей | 1981 |
|
SU1005297A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1418903A1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1983 |
|
SU1203698A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ, ВНОСИМЫХ АНАЛОГО-ЦИФРОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2012 |
|
RU2507681C2 |
| Устройство для автоматизированной поверки измерительных приборов | 1986 |
|
SU1348761A1 |
| Устройство для измерения динамических характеристик аналого-цифровых преобразователей | 1977 |
|
SU660232A1 |
| Устройство для контроля аналого-цифровых преобразователей | 1981 |
|
SU1058045A1 |
/
Уш
JL/
Л:
V,
ic
ю
iZ
у/у
7
