.(54) ДАТЧИК СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ
ТВЕРДЫХ ЧАСТИЦ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОДВИЖНОСТИ ЗУБОВ | 1993 |
|
RU2068242C1 |
| ЦИФРОВОЙ МНОГОКОМПОНЕНТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2475842C1 |
| Динамометрическая фреза | 1983 |
|
SU1152721A1 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2475715C1 |
| Способ определения энергии удара машины ударного действия и стенд для его осуществления | 1989 |
|
SU1640302A1 |
| НИЗКОЧАСТОТНЫЙ ЭЛЕКТРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1970 |
|
SU1840775A1 |
| Тензодатчик (его варианты) | 1983 |
|
SU1138672A1 |
| Устройство для измерения сил трения в подшипнике скольжения | 1978 |
|
SU729467A1 |
| Устройство для измерения толщины и неравномерности волокнистой ленты | 1987 |
|
SU1565355A3 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛИМЕРНЫХ НИТЕЙ МЕТОДОМ СВОБОДНЫХ ПРОДОЛЬНЫХ КОЛЕБАНИЙ | 2003 |
|
RU2249195C2 |
Изобретение относится к измерительной технике и может быть использовано в химической, нефтехимической, микробиологической промышленности при исследовании параметров струйных течений в псевдоожиженном слое и самого слоя, а также в других дисперсных системах, например при истечении твердых частиц из бункеров.
Известен динамометрический датчик скорости движения твердой фазы в псевдоожиженном слое, содержащий корпус с расположенным в нем стержнем со сферическим приемником на конце. Стержень соединен с упругой, пластинкой, с обеих сторон которой наклеены тензодатчики. Под воздействием силы, возникающей при взаимодействии шарика с движущимися частицами, деформируется упругая пластина.Тензодатчики преобразуют величину деформации пластины в электрический сигнал, который записывается самопишущим прибором. По величине пика кривой на ленте самописца определяют скорость движения твердой фазы в определенной точке слоя til.
Недостатком данного датчика является невозможность определения пространственного направления скорости
движения частиц в слое, а также малый коэффициент затухания колебаний пластины.
Известен также датчик скорости потока жидкости, который может применяться и для измерения скорости частиц в слое, состоящий из стержня со сферическим приемным элементом на конце, соединенного с преобразова10телем, выполненным в риде пластин с установленными на них тензодатчиками, закрепленных в корпусе. При воздействии силы, возникающей при ударе движущихся частиц о. сферический прием15ный элемент, деформируются упругие пластины. Причем каждая из них измеряет составляющую скорости частиц в данной плоскости. Тензодатчики пре2Q образуют величину деформации в электрический сигнал. Этот сигнал от каждой пластины выводится на отдельный канал, например, самопишущего прибора. По величине пиков на кривой определяют величину составляющих об25щей скорости частиц в определенной плоскости 23 .
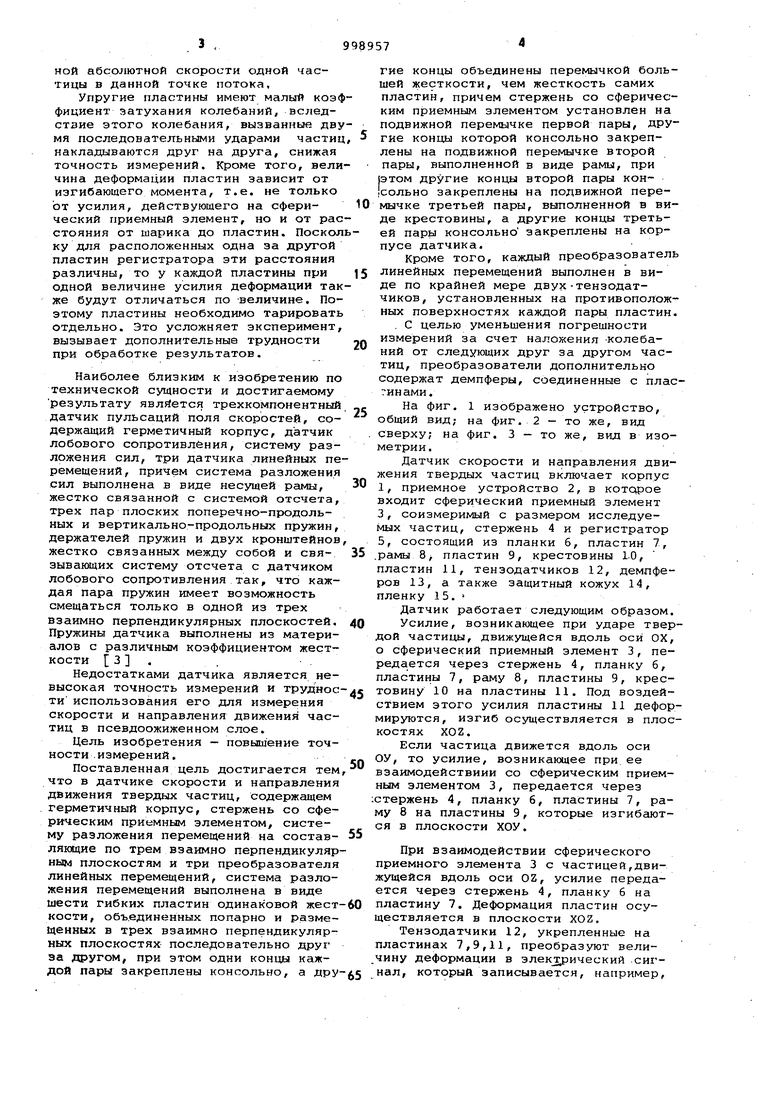
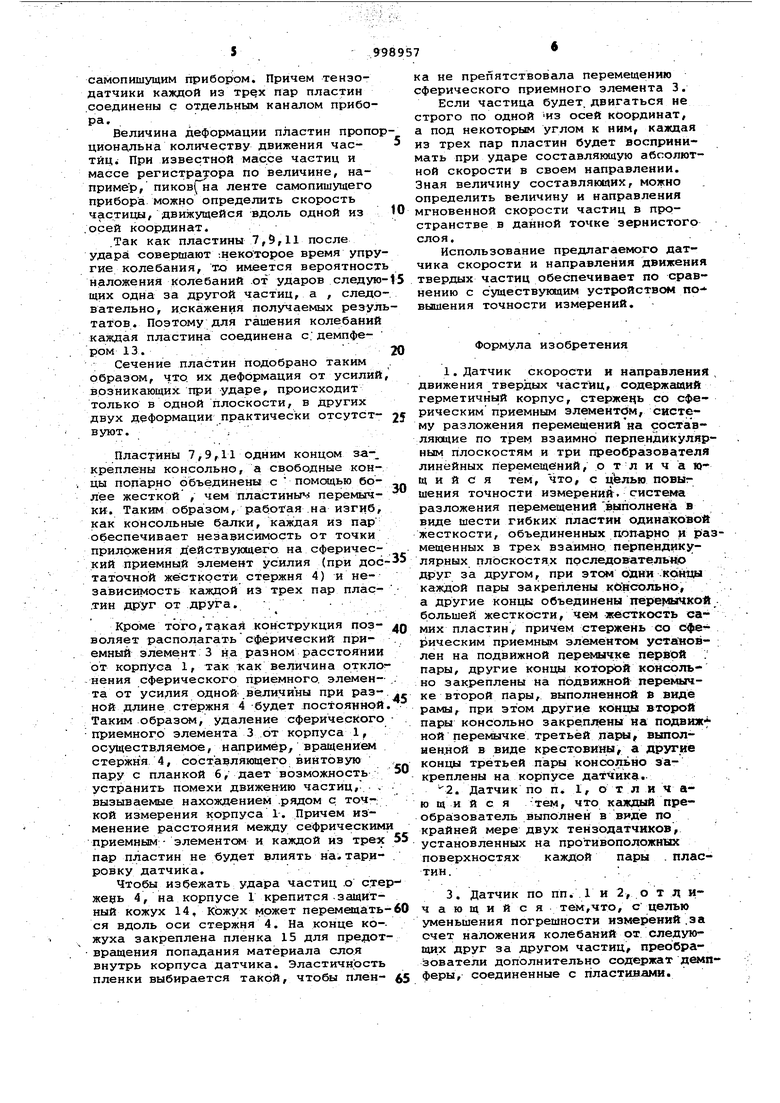
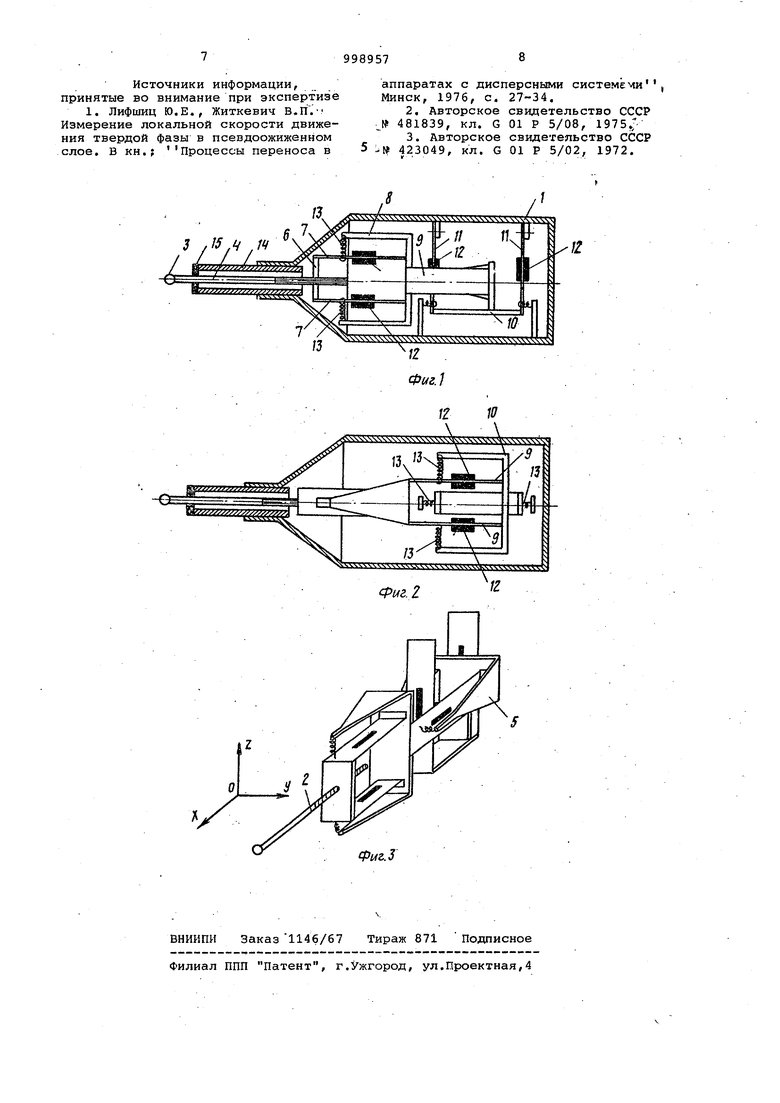
Недостатком датчика является невозможность определения пространственного направления скорости движе30ния частиц в слое, а также .мгчовенной абсолютной скорости одной частицы в данной точке потока. Упругие пластины имеют малый коэф фициент затухания колебаний, вследстзие этого колебания, вызванные дву мя последовательными ударами частиц накладываются друг на друга, снижая точность измерений. Кроме того, вели чина деформации пластин зависит от изгибающего момента, т.е. не только от усилия, действующего на сферический приемный элемент, но и от рас стояния от шарика до пластин. Поскол ку для расположенных одна за другой пластин регистратора эти расстояния различны, то у каждой пластины при одной величине усилия деформации так же будут отличаться по величине. Поэтому пластины необходимо тарировать отдельно. Это усложняет эксперимент, вызывает дополнительные трудности при обработке результатов. Наиболее близким к изобретению по технической сущности и достигаемому результату является трехкомпонентный датчик пульсаций поля скоростей, содержащий герметичный корпус, датчик лобового сопротивления, систему разложения сил, три датчика линейных пе ремещений, причем система разложения сил выполнена в виде несущей рамы, жестко связанной с системой отсчета, трех пар плоских поперечно-продольных и вертикально-продольных пружин, держателей пружин и двух кронштейнов жестко связанных между собой и связывающих систему отсчета с датчиком лобового сопротивления так, что каждая пара пружин имеет возможность смещаться только в одной из трех взаимно перпендикулярных плоскостей. Пружины датчика выполнены из материалов с различным коэффициентом жесткости 3 . Недостатками датчика является невысокая точность измерений и трудное ти использования его для измерения скорости и направления движения частиц в псевдоожиженном слое. Цель изобретения - повышение точности .измерений. Поставленная цель достигается тем что в датчике скорости и направления движения твердых частиц, содержащем герметичный корпус, стержень со сферическим приемным элементом, систему разложения перемещений на составляющие по трем взаимно перпендикуляр ным плоскостям и три преобразователя линейных перемещений, система разложения перемещений выполнена в виде шести гибких пластин одинаковой жест кости, объединенных попарно и размещенных в трех взаимно перпендикулярных плоскостях последовательно друг за другом, при этом одни концы каждой пары закреплены консольно, а дру гие концы объединены перемычкой большей жесткости, чем жесткость самих пластин, причем стержень со сферическим приемным элементом установлен на подвижной перемычке первой пары, ДРУгие концы которой консольно закреплены на подвижной перемычке второй пары, выполненной в виде рамы, при ЭТОМ другие концы второй пары кон сольно закреплены на подвижной перемычке третьей пары, выполненной в виде крестовины, а другие концы третьей пары консольно закреплены на корпусе датчика. Кроме того, каждый преобразователь линейных перемещений выполнен в виде по крайней мере двух-тензодатчиков, установленных на противоположных поверхностях каждой пары пластин. . С целью уменьшения погрешности измерений за счет наложения -колебаний от следующих друг за другом частиц, преобразователи дополнительно содержат демпферы, соединенные с пластинами. На фиг. 1 изображено устройство, общий ВИД; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид в изометрии. Датчик скорости и направления движения твердых частиц включает корпус 1, приемное устройство 2, в котррое входит сферический приемный элемент 3, соизмеримый с размером исследуемых частиц, стержень 4 и регистратор 5, состоящий из планки б, пластин 7, .рамы 8j пластин 9, крестовины 1-0, пластин 11, тензодатчиков 12, демпферов 13, а также защитный кожух 14, пленку 15. Датчик работает следующим образом. Усилие, возникающее при ударе твердой частицы, движущейся вдоль оси ОХ, о сферический приемный элемент 3, передается через стержень 4, планку б, пластины 7, раму 8, пластины 9, крестовину 10 на пластины 11. Под воздействием этого усилия пластины 11 деформируются, изгиб осуществляется в плоскостях XOZ. Если частица движется вдоль оси ОУ, то усилие, возникающее при ее взаимодействиии со сферическим приемным элементом 3, передается через стержень 4, пЛанку б, пластины 7, раму 8 на пластины 9, которые изгибаются в плоскости ХОУ. При взаимодействии сферического приемного элемента 3 с частицей,движущейся вдоль оси OZ, усилие передается через стержень 4, планку 6 на пластину 7. Деформация пластин осуществляется в плоскости XOZ, Тензодатчики 12, укрепленные на пластинах 7,9,11, преобразуют величину деформации в электрический сигнал, который записывается, например.
самопишущим прибором. Причем тенэодатчики каждой из трех пар пластин .соединены с отдельным каналом прибора.
Величина деформации пластин пропорциональна количеству движения частйц При известной массе частиц и массе регистратора по величине, например, пиков(на ленте самопишущего прибора можно определить скорость частицы, движущейся вдоль одной из .осей координат.
.Так как пластины 7,9,11 после удара совершают -.HeKolTopoe время упругие колебания, то имеется вероятность наложения колебаний от ударов следующих одна за другой частиц, а , следовательно, искажения получаемых результатов. Поэтому для гашения колебаний каждая пластина соединена с; демпфером 13.
Сечение плабтин подобрано таким Образом, что их деформация от усилий возникающих при ударе, происходит только в одной плоскости/ в других двух деформации практически отсутстВУЮТ. ;
Пластины 7,9,11 одним концом за- креплены консольно, а свободные концы попарно объединены с помощью более жесткой , чем пластиныч перемычкя. Таким образом, работая на изгиб, как консольные балки, каждая из пар обеспечивает независимость от точки приложения действукадвго на сферический приемный элемент усилия (при достаточной жёсткости стержня 4) и независимость каждой из трех пар пластин друг от .друга. ;
Кроме того,TaiKaH конструкция позволяет располагать сферический приемный элемент 3 на разном расстоянии от корпуса 1, так -как величина откло нения сферического приемного, элемен- та от усилия одной.вё.личины при разной длине стержня 4 будет постоянной Таким образом, удаление сферического приемного элемента 3 от корпуса 1, осуществляемое, например, вращением стержня. 4, составляющего винтовую пару с планкой 6, дает возможность устранить помехи движен-ию частиц,. , вызываемые нахождением .рядом с точ-: кой измерения корпуса 1-. Причем изменение расстояния между сефрическими приемным элементом и каждой из трех пар пластин не будет влиять на. тар.ировку датчика.
чтобы избежать удара частиц .о стерже1}ъ 4, на корпусе 1 крепится .защитный кожух 14, Кожух может перемицаться вдоль оси стержня 4. На конце ко-, жуха закреплена пленка 15 для предотвращения попадания материала слоя внутрь корпуса датчика. Эластичность пленки выбирается такой, чтобы пленка не препятствовала перемещению сферического приемного элемента 3.
Если частица будет, двигаться не строго по одной ИЗ осей координат, а под некоторым углом к ним, каждая из трех пар пластин будет воспринимать при ударе составляющую абсолютной скорости в своем направлении. Зная величину составляющих, можно определить величину и направления мгновенной скорости частиц в пррстранстве в данной точке зернистого слоя.
Использование предлагаемого датчика скорости и направления движения твердых частиц обеспечивает по сравнению с существуквдим устройством по- вышения точности измерений.
Формула изобретения
