Изобретение относится к авиационной технике, в частности к вертолетостроению, и может быть использовано при создании летательного аппарата укороченного взлета и посадки, а также для создания систем спасения возвращаемых космических объектов.
Известны способы уборки гибких лопастей несущего винта намоткой на барабаны, оси которых расположены горизонтально. Для уборки лопастей применяются механизмы, имеющие в своей основе редукторы, отбирающие мощность с вала несущего винта.
Редуктор, обычно тяжелый и громоздкий, работает согласованно со скоростью вращения вала несущего винта и имеет большое количество механических передач, что определяет возможность частых отказов.
Наиболее близким техническим решением, взятым за прототип, является изобретение по патенту США N 3637168.
В комбинированном летательном аппарате несущий винт имеет гибкие лопасти, сворачиваемые на барабаны и управляемые автоматом перекоса. Барабаны расположены симметрично относительно оси вала и вращаются относительно горизонтально расположенных своих осей. Реборды барабанов, расположенные ближе к валу несущего винта, выполнены в виде конических зубчатых колес, приводимых в движение одной шестерней, расположенной соосно с валом несущего винта.
Недостаток данного прототипа состоит в том, что каждая лопасть сворачивается на свой барабан и для осуществления сворачивания необходим дополнительный привод. Все это увеличивает габариты и вес несущего винта в целом.
Целью изобретения является уменьшение габаритов и веса несущего винта.
Цель достигается тем, что в несущем винте летательного аппарата, имеющем гибкие лопасти, сворачиваемые на барабаны и управляемые автоматом перекоса, лопасти закреплены непосредственно на валу несущего винта, выполняющем роль барабана. При этом лопасти на участке между сечением управления автомата перекоса и валом, закручиваясь, занимают положение от установочного угла атаки до положения, параллельного оси вала. Лопасти могут сворачиваться на барабан за счет собственной кинетической энергии вращения при затормаживании вала фрикционной муфтой.
На фиг. 1-7 изображен предлагаемый несущий винт и отдельные его узлы.
Несущий винт содержит вал-барабан 1, управляющую каретку 2, гибкую лопасть 3, центробежный груз 4, автомат перекоса 5, согласующее устройство 6, штангу 7 согласующего устройства, тягу 8 управления автомата перекоса, серворуль 9, фрикционную муфту 10, профилированные верхний 11 и нижний 12 валики, роликовый радиально-упорный подшипник 13, корпус 14 согласующего устройства, крышку 15 согласующего устройства, стопорное кольцо 16, тягу 17 управления автоматом перекоса, тягу 18 управления фрикционной муфтой, карданный шарнир 19.
Лопасть 3 закреплена на валу 1 так, что хорда ее профиля параллельна оси вращения вала 1. На участке между валом 1 и кареткой управления 2 лопасть 3 закручена относительно продольной оси жесткости, при этом в сечении Б-Б каретки управления 2 (см. фиг. 3,4) лопасть 3 занимает положение установочного угла атаки. На конце лопасти 3 установлен центробежный груз 4 с серворулем 9.
Устройство каретки управления 2 показано на фиг. 4.
Каретка 2 подвижно закреплена на штанге 7 согласующего устройства 6 и имеет две степени свободы угловых перемещений, что обеспечивается карданным шарниром 19 (фиг. 6). В каретке управления 2 установлены профилированные валики 11 и 12, между которыми проходит лопасть 3.
Ниже места крепления и намотки лопастей 3 на валу 1 располагается согласующее устройство 6, конструкция которого показана на фиг. 7. В корпусе 14 согласующего устройства 6 установлены роликовые радиально-упорные подшипники 13, которые своими внутренними кольцами запрессованы на вал 1 и дополнительно удерживаются стопорными кольцами 16. Подшипники 13 удерживаются в корпусе 14 согласующего устройства 6 крышкой 15. На корпусе 14 неподвижно закреплены штанги 7, количество которых определяется количеством лопастей несущего винта.
Ниже согласующего устройства 6 на валу 1 расположен автомат перекоса 5, связанный при помощи тяги 8 с кареткой управления 2 и при помощи тяг 17 с органами управления летательного аппарата.
Фрикционная муфта 10 расположена на валу 1 ниже автомата перекоса 5 и связана с органами управления летательного аппарата при помощи тяг 18.
При вращении вала 1 несущего винта лопасти 3 под действием центробежной силы, действующей на груз 4, начинают разматываться с вала 1, отставая при этом относительно него по углу в плоскости вращения. Согласующее устройство 6 вращается совместно с лопастями 3, обеспечивая их согласованное совместное разматывание при помощи жестко закрепленных на нем штанг 7, удерживающих каретки управления 2.
При разматывании лопасти 3 на участке между валом 1 и кареткой управления 2 закручиваются, занимая положение установочного угла атаки. Управление лопастями 3 по углу атаки осуществляется в корневой и концевой частях соответственно автоматом перекоса 5 через тягу 8 и каретку управления 2 и серворулем 9, установленным на центробежном грузе 4.
Для уборки лопастей вал 1 несущего винта притормаживается при помощи фрикционной муфты 10. Появляющаяся при этом инерционная сила, действующая на центробежный груз 4 по касательной к траектории его вращения, заставляет лопасть 3 наматываться на вал 1, закручиваясь на участке между кареткой управления 2 и валом 1 относительно продольной оси жесткости и занимая при этом положение от установочного угла до положения, параллельного оси вала 1.
По окончании уборки двигатель, приводящий в движение вал 1, выключается, и после остановки вала 1 фрикционная муфта 10 освобождается.
Таким образом, данная конструкция позволяет осуществить уборку и выпуск гибких лопастей несущего винта без применения механических передач и индивидуальных для каждой лопасти барабанов, увеличивающих вес и габариты конструкции, что имеет существенное значение в авиационной технике. Сворачивание лопастей на единый барабан без применения механических передач повышает надежность и обеспечивает синхронность уборки и выпуска гибких лопастей несущего винта.
Применение предложенного способа сворачивания с закручиванием лопастей, поясненного на конкретном примере, позволяет быстро произвести уборку лопастей в экстренных ситуациях без применения дополнительных устройств и элементов управления, не снижая при этом эффективности и надежности работы. (56) Патент США N 3637168, кл. В 64 С 27/33, 1972.
Изобретение относится к авиационной технике, в частности к вертолетостроению, и может быть использовано при создании летательного аппарата укороченного взлета и посадки, а также для создания систем спасения возвращаемых космических объектов. Изобретение обеспечивает уменьшение габаритов и массы несущего винта. Гибкая лопасть 3 закреплена на валу 1 несущего винта. На участке между валом 1 и кареткой управления 2 лопасть 3 закручена относительно продольной оси жесткости. При этом в каретке управления 2 лопасть 3 занимает положение установочного угла атаки. Лопасти 3 разматываются при вращении вала 1 несущего винта под действием центробежной силы, действующей на груз 4. Для уборки лопастей 3 вал 1 несущего винта притормаживается. Появляющаяся при этом инерционная сила, действующая на груз по касательной к траектории его вращения, заставляет лопасти наматываться на вал 1. 7 ил.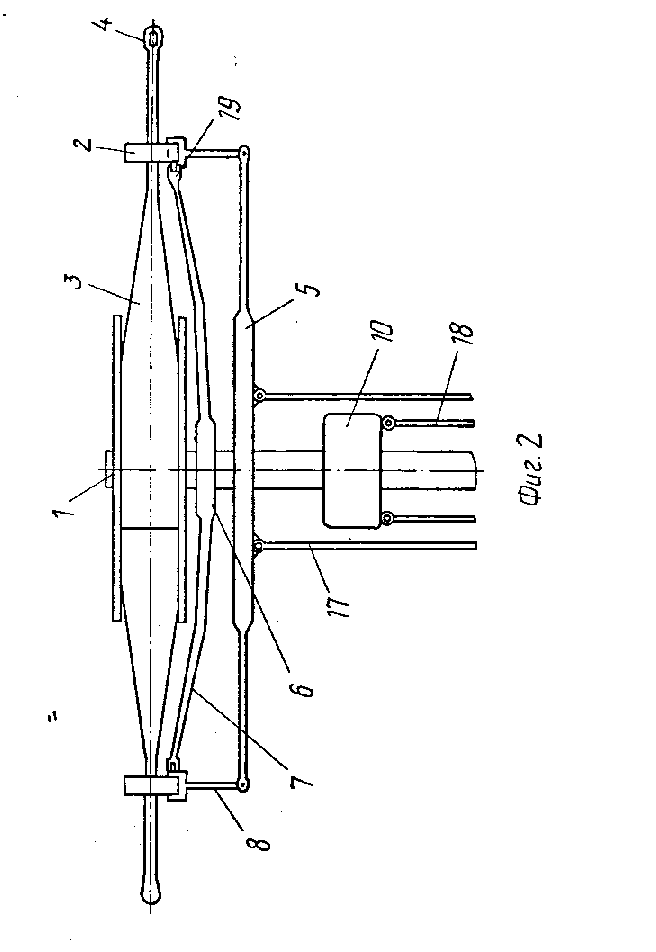
НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБКИМИ УБИРАЕМЫМИ ЛОПАСТЯМИ, содержащий устройство для торможения винта, автомат перекоса с каретками управления и устройство для свертывания лопастей, отличающийся тем, что гибкие лопасти закреплены непосредственно на валу несущего винта в таком положении, что хорды их профилей параллельны оси винта, а установочный угол лопастей определен положением кареток управления автомата перекоса, при этом уборка и наматывание гибких лопастей на вал несущего винта осуществляется за счет кинетической энергии вращения при торможении винта фрикционной муфтой.
