Изобретение относится к гидроавтоматике и может быть использовано в конструкциях промышленных роботов, прессов и других механизмов, работающих в прерывистом режиме.
Известен следящий гидропривод, содержащий источник рабочей жидкости под давлением с нагнетательной гидролинией и параллельно подключенные к ней два гидроцилиндра, соединенные с дифференциальным редуктором [1] .
Недостатком этого гидропривода является узость функциональных возможностей из-за отсутствия средств регулирования.
Известен также следящий гидропривод, содержащий источник рабочей жидкости под давлением с нагнетательной гидролинией, параллельно подключенные к ней два гидромотора, валы которых соединены с входными валами дифференциального редуктора, и два регулируемых дросселя, установленные в сливных гидролиниях гидромоторов и соединенные входами управления с задатчиком через устройство управления углом поворота выходного вала дифференциального редуктора [2] .
Недостатком данного гидропривода также является узость функциональных возможностей из-за узости диапазона регулирования.
Целью изобретения является расширение функциональных возможностей.
На чертеже изображена схема следящего гидропривода.
Гидропривод содержит источник рабочей жидкости под давлением в виде гидростанции 1 с нагнетательной гидролинией 13, параллельно подключенные к ней гидромоторы 2 и 3, валы 4 и 5 которых соединены с входными валами дифференциального редуктора 6. На выходном валу 7 редуктора установлен датчик 8 угла поворота, входящий в устройство управления углом поворота вала 7 совместно с измерителем 9 рассогласования и схемой 10 вычитания. В сливных гидролиниях 14 и 15 гидромоторов 2 и 3 установлены регулируемые дроссели 11 и 12, к входам управления которых подключены выходы измерителя 9 и схемы 10, соединенных между собой и с задатчиком (не изображен). Модуль редуктора 6 равен единице, гидромоторы 2 и 3 имеют равные объемные постоянные.
Задатчик вырабатывает сигнал управления, т. е. входное управляющее воздействие g(t) и опорный сигнал.
Следящий гидропривод работает следующим образом.
В исходном состоянии, при нулевом уровне сигнала управления задатчика путем смещения на выходе устройства управления устанавливается напряжение  , в этом случае напряжения Uупр1 = Uупр2 на входах управления дросселей 11 и 12 и последние находятся в среднем положении, расходы через гидромоторы 2 и 3, имеющие одинаковые объемные постоянные, равны, а значит, равны и угловые скорости n1 и n2 их выходных валов 4 и 5 соответственно. Так как угловая скорость nвых выходного вала 7 редуктора 6 определяется, как nвых = n1-n2, то на основании вышеизложенного в исходном состоянии гидромоторы 2 и 3 работают на режимах, близких к номинальному, а nвых = 0. При необходимости осуществить поворот выходного вала 7 редуктора 6 в ту или иную сторону на уголϕ задатчик воздействует на устройство управления входным управляющим заданием g(t), которое сравнивается с показанием датчика 8 углового положения, рассогласование преобразуется в устройстве управления. Пропорциональное управление дросселями 11 и 12 осуществляется напряжениями Uупр1 и Uупр2, причем Uупр2 формируется с помощью схемы 10 вычитания. Вследствие этого в зависимости от заданного направления вращения выходного вала 7 редуктора 6 в одном из дросселей 11 и 12 проходное сечение увеличивается, а в другом уменьшается, что приводит к перераспределению скоростей n1, n2 гидромоторов 2 и 3 и в конечном счете к повороту выходного вала 7 редуктора 6. В зависимости от направления вращения выходного вала 7 редуктора 6 один из гидромоторов переходит в двигательный режим, а другой - в генераторный, причем моменты на них равны. Если происходит возрастание момента нагрузки выходного вала 7, то частота вращения гидромотора, работающего в двигательном режиме, падает, а в генераторном растет, при этом разность частот гидромоторов уменьшается, что приводит к уменьшению частоты вращения вала 7 при неизменных сигналах управления Uупр1, Uупр2 и положении дросселей 11 и 12. Таким образом, в двухдифференциальном режиме гидропривода проявляется свойство силомоментного саморегулирования. Это свойство позволяет гидроприводу при различных моментах нагрузки, в том числе и инерционной, изменять режимы разгона и торможения, а также получать установившуюся скорость, в экстремальных случаях вплоть до остановки выходного вала. В результате гидропривод имеет по существу переменную динамическую структуру, т. е. гидромотор, находящийся при "пониженном" питании расходом, в то же время питается номинальным давлением, при этом его гидромеханическая постоянная падает и при изменении силового режима "резко" изменяет свой скоростной режим работы. Данное свойство гидропривода позволяет использовать его в роботах и прессах, работающих в прерывистых (старт-стопных) режимах с большими инерционными нагрузками и приводах с неблагоприятными по динамическим параметрам технологическими нагрузками. (56) 1. Авторское свидетельство СССР N 1326788, кл. E 21 F 13/00, 1982.
, в этом случае напряжения Uупр1 = Uупр2 на входах управления дросселей 11 и 12 и последние находятся в среднем положении, расходы через гидромоторы 2 и 3, имеющие одинаковые объемные постоянные, равны, а значит, равны и угловые скорости n1 и n2 их выходных валов 4 и 5 соответственно. Так как угловая скорость nвых выходного вала 7 редуктора 6 определяется, как nвых = n1-n2, то на основании вышеизложенного в исходном состоянии гидромоторы 2 и 3 работают на режимах, близких к номинальному, а nвых = 0. При необходимости осуществить поворот выходного вала 7 редуктора 6 в ту или иную сторону на уголϕ задатчик воздействует на устройство управления входным управляющим заданием g(t), которое сравнивается с показанием датчика 8 углового положения, рассогласование преобразуется в устройстве управления. Пропорциональное управление дросселями 11 и 12 осуществляется напряжениями Uупр1 и Uупр2, причем Uупр2 формируется с помощью схемы 10 вычитания. Вследствие этого в зависимости от заданного направления вращения выходного вала 7 редуктора 6 в одном из дросселей 11 и 12 проходное сечение увеличивается, а в другом уменьшается, что приводит к перераспределению скоростей n1, n2 гидромоторов 2 и 3 и в конечном счете к повороту выходного вала 7 редуктора 6. В зависимости от направления вращения выходного вала 7 редуктора 6 один из гидромоторов переходит в двигательный режим, а другой - в генераторный, причем моменты на них равны. Если происходит возрастание момента нагрузки выходного вала 7, то частота вращения гидромотора, работающего в двигательном режиме, падает, а в генераторном растет, при этом разность частот гидромоторов уменьшается, что приводит к уменьшению частоты вращения вала 7 при неизменных сигналах управления Uупр1, Uупр2 и положении дросселей 11 и 12. Таким образом, в двухдифференциальном режиме гидропривода проявляется свойство силомоментного саморегулирования. Это свойство позволяет гидроприводу при различных моментах нагрузки, в том числе и инерционной, изменять режимы разгона и торможения, а также получать установившуюся скорость, в экстремальных случаях вплоть до остановки выходного вала. В результате гидропривод имеет по существу переменную динамическую структуру, т. е. гидромотор, находящийся при "пониженном" питании расходом, в то же время питается номинальным давлением, при этом его гидромеханическая постоянная падает и при изменении силового режима "резко" изменяет свой скоростной режим работы. Данное свойство гидропривода позволяет использовать его в роботах и прессах, работающих в прерывистых (старт-стопных) режимах с большими инерционными нагрузками и приводах с неблагоприятными по динамическим параметрам технологическими нагрузками. (56) 1. Авторское свидетельство СССР N 1326788, кл. E 21 F 13/00, 1982.
2. Авторское свидетельство СССР N 420793, кл. E 21 F 13/00, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2008 |
|
RU2369789C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КАНАТА | 1991 |
|
RU2025224C1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| Гидропривод бурового станка | 1987 |
|
SU1460235A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1250740A1 |
Использование: в конструкциях промышленных роботов, прессов и других механизмов, работающих в прерывистом режиме. Сущность изобретения: следящий гидропривод содержит гидромоторы 2 и 3, дифференциальный редуктор 6, датчик 8 угла поворота, измеритель 9 рассогласования, схему 10 вычитания. На входах управления дросселей 11 и 12 формируются сигналы управления скоростей вращения валов 4 и 5 гидромоторов 2 и 3, разность которых определяетс скорость выходного вала 7 редуктора 6. 1 ил.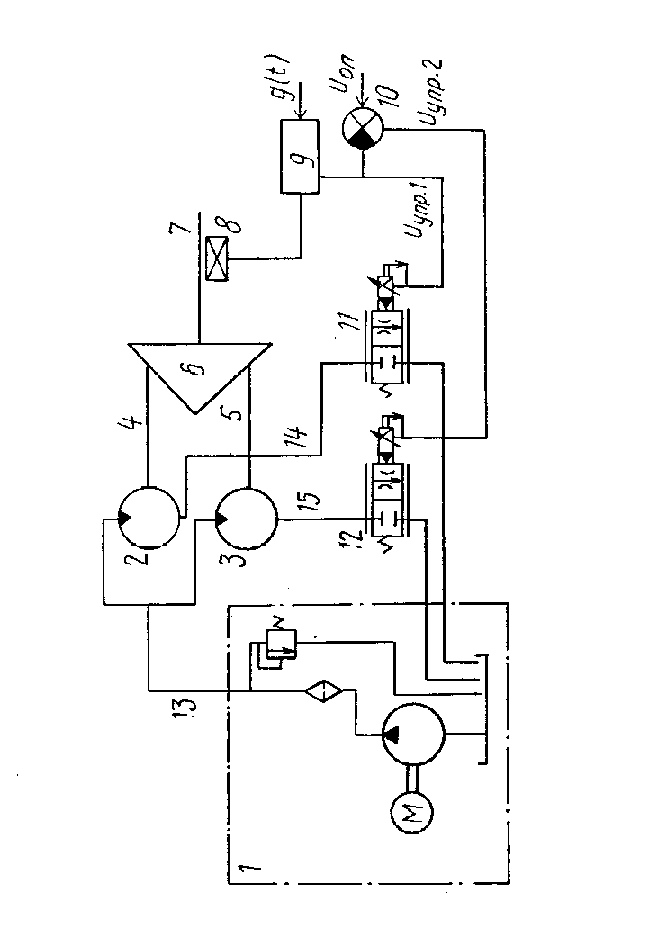
СЛЕДЯЩИЙ ГИДРОПРИВОД, содержащий источник рабочей жидкости под давлением с нагнетательной гидролинией, параллельно подключенные к ней два гидромотора, валы которых соединены с входными валами дифференциального редуктора, и два регулируемых дросселя, установленных в сливных гидролиниях гидромоторов и соединенных входами управления с задатчиком через устройство управления углом поворота выходного вала дифференциального редуктора, отличающийся тем, что, с целью расширения функциональных возможностей, устройство управления углом поворота выполнено в виде измерителя рассогласования, схемы вычитания и датчика угла поворота выходного вала, причем последний подключен к одному входу измерителя рассогласования, другой вход которого подключен к задатчику, а выход - к входу управления одного из дросселей и к инверсному входу схемы вычитания, прямой вход которой соединен с задатчиком, а выход - с входом управления второго дросселя.
