Изобретение относится к системам автоматического управления и может быть использовано в электрогидравлических следящих приводах (ЭГСП) наведения и стабилизации, работающих от источника энергии ограниченной мощности, например, от газотурбинного двигателя (ГТД) в составе автономного объекта.
Наиболее близким по технической сущности и достигаемому эффекту является ЭГСП [1] , в котором снижение указанных пиковых значений потребляемой ЭГСП мощности (момента) осуществляется путем регламентированного управления быстродействием регулятора (люльки) насоса, а именно обеспечения максимального быстродействия в некоторой зоне, и уменьшения быстродействия регулятора в "грубой" зоне до величины, определяемой по предельно допустимым значениям мощности (момента) на валу насоса и источника энергии.
Он состоит из последовательно соединенных задатчика поворота оси привода 1, вход которого соединен со входом задатчика скорости задающей оси, первого элемента сравнения, суммирующего усилителя, гидроусилителя, к выходам которого подключен регулируемый дроссель, вход которого соединен с выходом первого элемента сравнения и источником порогового сигнала U
Недостатком привода-прототипа является то, что снижение пиковых значений потребляемой ЭГСП мощности (момента) достигается достаточно сложным путем, а именно - введением в состав ЭГСП помимо электронной схемы сравнения специального электрогидравлического прибора - регулируемого дросселя, подключение которого в схему ЭГСП требует существенной доработки гидронасоса и применения специальных элементов гидромонтажа. Изменение проходного сечения дросселя, а следовательно, и управление уровнем ограничения мощности может осуществляться только дискретно при его предварительной настройке, а это ограничивает функциональные возможности такого ЭГСП. Ограниченной является и надежность регулируемого дросселя с подвижными механическими элементами конструкции.
Кроме того, из-за имеющегося запаздывания (≈0,08-0,1 с) в срабатывании регулируемого дросселя, превышающего время срабатывания предохранительных клапанов (≈0,02-0,04 с), в приводе-прототипе не представляется возможным наряду со снижением пикового значения мощности (момента) одновременно снизить и пиковое значение разности давлений.
Целью изобретения является повышение надежности привода за счет снижения пиковых значений разности давлений в приводе.
Поставленная цель достигается тем, что в известный электрогидравлический следящий привод, содержащий последовательно включенные задатчик поворота оси привода, вход которого соединен с входом задатчика скорости от привода, первый элемент сравнения, суммирующий усилитель, гидроусилитель, к выходам которого подключены цилиндры управления люльки насоса, соединенного с датчиком угла поворота люльки, выходы насоса подключены ко входам датчиков давления и входам гидромотора, выход которого соединен с входом датчика скорости исполнительной оси и через первый редуктор с выходом привода и вторым входом первого элемента сравнения, а также источник механической энергии, подключенный через второй редуктор к второму входу насоса и датчику скорости вала насоса, выход которого соединен с вторым входом датчика угла поворота люльки насоса, второй элемент сравнения, первый и второй входы которого соединены соответственно с выходом первого элемента сравнения и источником порогового сигнала, при этом выходы датчика угла поворота люльки насоса, датчиков скорости исполнительной оси, задатчика скорости оси привода, датчиков давления подключены соответственно к второму - пятому входам суммирующего усилителя, введен элемент ограничения, суммирующий усилитель выполнен в виде усилителя с перестраиваемым коэффициентом усиления, управляющий вход которого соединен через элемент ограничения с выходом второго элемента сравнения, а второй выход - со вторым входом элемента ограничения.
В прототипе воздействия схемы ограничения на регулирующий орган насоса передается, как указано выше, с запаздыванием 0,08 - 0,1 с, а в заявляемом приводе - с запаздыванием золотника гидроусилителя 0,002-0,003 с, что на порядок меньше времени срабатывания предохранительных клапанов, вследствие чего и получен эффект ограничения на 20-30% пикового значения разности давлений - одного из факторов повышения надежности гидропривода.
Заявляемый ЭГСП (чертеж) состоит из последовательно соединенных СКВТ задатчика поворота оси привода 1, вход которого соединен со входом задатчика скорости оси привода 2; первого элемента сравнения 3; суммирующего усилителя 4, соединенного своими выходами с гидроусилителем 5 и элементом ограничения 6, подключенным своим входом к выходу второго элемента сравнения 7, вход которого соединен с выходом первого элемента сравнения 3 и источником порогового сигнала; цилиндров управления 8, 9, подключенных своими входами к выходам гидроусилителя 5; регулирующего органа (люлька) насоса 10, соединенного с датчиком угла поворота люльки 11; насоса 12, выходы которого соединены со входами датчиков давления 13, 14; гидромотора 15, выход которого соединен с датчиком скорости исполнительной оси 16 и через первый редуктор 17 с объектом регулирования 18 и элементом сравнения 3. Со входами усилителя 4 соединены выходы датчиков давления 13, 14, датчика угла поворота люльки 11 и выходы датчиков скорости исполнительной оси 16 и задатчика скорости 2, а также выход элемента ограничения 6.
Привод содержит также источник механической энергии (ГТД) 19, через второй редуктор 20, подсоединенный ко второму входу насоса 12 и датчику скорости вала насоса 21, выход которого подсоединен ко второму входу датчика угла поворота люльки насоса 11.
ЭГСП работает следующим образом.
В режиме отработки рассогласований - режиме максимального нагружения напряжение Uб, пропорциональное ошибке, с элемента 3 поступает на входы усилителя 4 и элемент сравнения 7.
При ошибке ЭГСП, равной или большей выбранного уровня переключений, определяемого по величине допустимой динамической ошибки, напряжение Uб≥U
Причем изменение момента на валу насоса Mн во времени подсчитывается по выражению
на основании экспериментальных данных, полученных из осциллограмм Δp(t) и γ(t) в режиме отработки рассогласований,
Здесь
ΔP(t)- разность давлений в силовых магистралях гидропривода;
q - объемная постоянная гидромотора; относительный угол поворота регулирующего органа (люльки) насоса;
относительный угол поворота регулирующего органа (люльки) насоса;
γ(t), γmax- текущее и максимальное значение угла поворота люльки насоса.
Использование предлагаемого изобретения позволяет снизить пиковые значения момента (мощности) в режиме отработки рассогласований (в реальном образце ЭГСП) примерно на 50-60%), снизить разность давлений в гидроприводе на 20-30% и обеспечить безотказную работу ЭГСП и источника энергии (ГТД). В то же время эффект ограничения потребляемой мощности в заявляемом ЭГСП достигается иными средствами, значительно более простыми по сравнению с прототипом, конструктивными и схемными изменениями исходного ЭГСП, что позволяет не только упростить конструкцию, но, исключая электрогидравлический прибор с подвижными элементами (регулируемый дроссель), повысить надежность ЭГСП.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
Изобретение относится к системам автоматического управления. Технический результат - повышение надежности за счет снижения пиковых значений разности давлений в приводе. Электрогидравлический следящий привод содержит задатчик поворота оси привода, задатчик скорости оси привода, элемент сравнения, суммирующий усилитель, гидроусилитель, цилиндры управления, регулирующий орган (люлька) насоса, соединенный с датчиком угла поворота люльки, насос, выходы которого соединены с входами датчиков давления, гидромотор, выход которого соединен с датчиком скорости исполнительной оси и через редуктор с объектом регулирования и элементом сравнения, источник механической энергии через второй редуктор подсоединен к второму входу насоса и датчику скорости вала насоса, выход которого подсоединен к второму входу датчика угла поворота люльки насоса, второй элемент сравнения и элемент ограничения. 1 ил.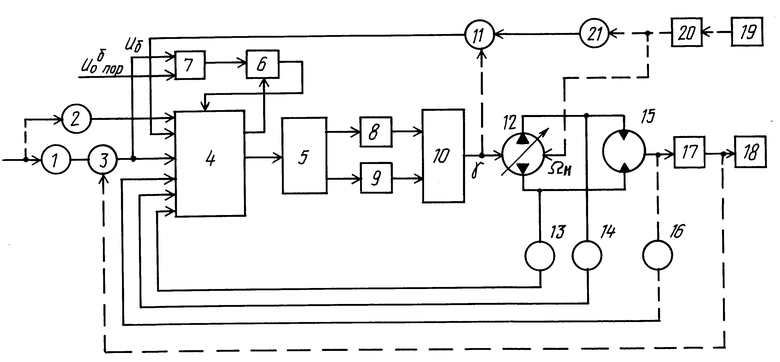
Электрогидравлический следящий привод, содержащий последовательно включенные задатчик поворота оси привода, вход которого соединен с входом задатчика скорости от привода, первый элемент сравнения, суммирующий усилитель, гидроусилитель, к выходам которого подключены цилиндры управления люльки насоса, соединенного с датчиком угла поворота люльки, выходы насоса подключены к входам датчиков давления и входам гидромотора, выход которого соединен с входом датчика скорости исполнительной оси и через первый редуктор - с выходом привода и вторым входом первого элемента сравнения, а также источник механической энергии, подключенный через второй редуктор к второму входу насоса и датчику скорости вала насоса, выход которого соединен с вторым входом датчика угла поворота люльки насоса, второй элемент сравнения, первый и второй входы которого соединены соответственно с выходом первого элемента сравнения и источником порогового сигнала, при этом выходы датчика угла поворота люльки насоса, датчиков скорости исполнительной оси, задатчика скорости оси привода, датчиков давления подключены соответственно к второму - пятому входам суммирующего усилителя, отличающийся тем, что, с целью повышения надежности привода за счет снижения пиковых значений разности давлений в приводе, в привод введен элемент ограничения, суммирующий усилитель выполнен в виде усилителя с перестраиваемым коэффициентом усиления, управляющий вход которого соединен через элемент ограничения с выходом второго элемента сравнения, а второй выход с вторым входом элемента ограничения.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
