Изобретение относится к гидроприводам объемного регулирования общего назначения и может быть использовано для управления любыми инерционными неуравновешенными объектами подъемно-транспортных, строительно-дорожных, коммунальных машин с широким диапазоном изменения скоростей и моментов нагрузок.
Известен гидропривод объемного регулирования, содержащий источник рабочей жидкости под давлением с нагнетательной гидролинией, параллельно подключенные к ней два гидромотора, валы которых соединены с входными валами дифференциального редуктора, и два регулируемых дросселя, установленных в сливных гидролиниях гидромоторов и соединенных входами управления с задатчиком через устройство управления углом поворота выходного вала дифференциального редуктора, отличающийся тем, что, с целью расширения функциональных возможностей, устройство управления углом поворота выполнено в виде измерителя рассогласования, схемы вычитания и датчика угла поворота выходного вала, причем последний подключен к одному входу измерителя рассогласования, другой вход которого подключен к задатчику, а выход - к входу управления одного из дросселей и к инверсному входу схемы вычитания, прямой вход которой соединен с задатчиком, а выход - с входом управления второго дросселя (RU №2005921).
Недостатками такого гидропривода являются однонаправленность действия развиваемого момента на валу редуктора, отсутствие возможности реверсирования нагрузки, низкий кпд дроссельного регулирования потоков рабочей жидкости, отсутствие возможности регулирования величины момента, развиваемого на валу редуктора, что снижает функциональные возможности, надежность, долговечность и эффективность гидропривода.
Известен также принятый в качестве прототипа гидропривод объемного регулирования, содержащий блок управления регулирующим органом реверсивного регулируемого насоса и два параллельно подключенных к нему силовыми гидролиниями гидромотора, валы которых кинематически соединены редуктором с общей нагрузкой, один из гидромоторов выполнен с постоянным рабочим объемом, а другой - с регулируемым рабочим объемом, в силовых гидролиниях установлены датчики давления, подключенные к блоку ограничения давления, выполненному с возможностью преобразования электрических сигналов датчиков давления в сигнал разности давления для сравнения с сигналом заданной разности давлений и изменений рабочего объема регулируемого гидромотора в зависимости от результирующего сигнала и при превышении сигнала разности давлений в силовых гидролиниях сигнала заданного значения допустимой разности давлений изменять суммарный развиваемый момент на валу нагрузки (RU 2369789 C1).
Недостатком такого гидропривода является использование в блоке ограничения давлений сигнала разности давлений с датчиков давлений в силовых гидролиниях. Такое использование сигнала разности давлений при формировании сигнала на выходе блока ограничения давлений для управления регулируемым гидромотором несколько сложнее, чем использование отдельно сигналов с каждого датчика давления в силовых гидролиниях.
К недостаткам такого типа гидропривода можно отнести отсутствие в составе гидропривода прибора управления, который должен формировать сигналы управления регулируемым насосом и гидромотором по определенной программе или закону регулирования скоростью вала нагрузки и давлениями в силовых гидролиниях.
Технической задачей изобретения является повышение эффективности гидропривода объемного регулирования и увеличение его функциональных возможностей путем применения более рациональных и экономически выгодных технических средств управления.
Технический результат, обеспечивающий решение поставленной задачи, состоит в увеличении функциональных возможностей по регулированию развиваемого на валу гидропривода момента и скорости нагрузки при изменениях величин давлений в силовых гидролиниях во всем их рабочем диапазоне. Предлагаемый гидропривод объемного регулирования позволяет компактными гидромашинами с малыми рабочими объемами обеспечить режимы работы с большими скоростями при малых моментах нагрузки и с малыми скоростями при больших моментах нагрузки, используя более рациональную схему блока управления давлениями в силовых гидролиниях.
Сущность изобретения заключается в том, что гидропривод объемного регулирования содержит регулируемый реверсивный насос с приводным двигателем и механизмом регулирования рабочего объема, связанный силовыми гидролиниями с двумя параллельно включенными гидромоторами, валы которых соединены редуктором с общей нагрузкой, причем один из гидромоторов выполнен с постоянным рабочим объемом, а другой гидромотор с переменным рабочим объемом снабжен механизмом регулирования рабочего объема, в каждой силовой гидролинии установлены датчики давления, выходы которых соединены с блоком управления давлениями в силовых гидролиниях, состоящим из задатчика сигнала номинального давления, выход которого соединен с инверсным входом первого алгебраического сумматора и с прямым входом второго алгебраического сумматора; на прямой вход первого сумматора подключен выход первого датчика давления и на инверсный вход второго сумматора подключен выход второго датчика давления; выход первого сумматора соединен с первым нелинейным блоком с пропорциональной положительной характеристикой, а выход второго сумматора соединен со вторым нелинейным блоком с пропорциональной отрицательной характеристикой; выход первого нелинейного блока подан на первый прямой вход, а выход второго нелинейного блока подан на второй инверсный вход пропорционального усилителя; выход пропорционального усилителя подключен к механизму регулирования гидромотора с переменным рабочим объемом. Гидропривод содержит первый нелинейный блок с пропорциональной положительной характеристикой, при которой сигнал на его выходе равен нулю при отрицательном значении сигнала на входе, и второй нелинейный блок с пропорциональной отрицательной характеристикой, при которой сигнал на его выходе равен нулю при положительном значении сигнала на входе.
Задатчик сигнала номинального давления имеет алгебраический сумматор с двумя прямыми входами, на первый вход которого поступает сигнал номинального давления, а на второй вход сигнал от прибора программного управления. Прибор программного управления первым выходом с сигналом регулирования скорости вала нагрузки соединен с механизмом регулирования насоса с переменным рабочим объемом и вторым выходом с сигнала регулирования величины допустимого давления в силовых гидролиниях гидропривода соединен в блоке управления давлениями с сумматором задатчика сигнала допустимого давления.
На чертеже изображена принципиальная схема гидропривода объемного регулирования с блоком управления давлениями в силовых гидролиниях.
Гидропривод объемного регулирования содержит последовательно соединенные регулируемый реверсивный насос 1 с приводным двигателем 2 и механизмом 3 регулирования рабочего объема, связанный силовыми гидролиниями (трубопроводами) 4, 5 с двумя параллельно включенными гидромоторами 6 и 7, валы которых соединены редуктором 9 с общей нагрузкой. К гидролиниям 4, 5 подключен источник подпитки (не изображено).
Гидромотор 6 выполнен с постоянным рабочим объемом (т.е. нерегулируемым). Гидромотор 7 с переменным рабочим объемом снабжен механизмом 8 регулирования рабочего объема.
Регулируемый насос 1, гидромотор 6 и регулируемый гидромотор 7 являются аксиально-поршневыми гидромашинами. Механизм 3 регулирования насоса 1 и механизм 8 регулирования гидромотора 7 преимущественно электрогидравлического типа с электромагнитом управления, гидроусилителем «сопло-заслонка», золотниковым дросселирующим распределителем и гидроцилиндрами управления регулирующим органом гидромашины.
В каждой силовой гидролинии 4 и 5 установлен датчик давления 10 и 11 с электрическим выходным сигналом, пропорциональным величине давления в гидролинии. Выходы датчиков давления 10 и 11 соединены с блоком 12 управления давлениями в силовых гидролиниях.
Блок 12 управления давлениями имеет в своем составе задатчик 13 сигнала номинального давления в силовых гидролиниях. Задатчик 13 имеет алгебраический сумматор с двумя прямыми входами, на первый вход которого поступает Uном номинального давления, а на второй вход сигнал Uпу от прибора программного управления. Сигнал Uпу может увеличивать или уменьшать в зависимости от программы прибора 19 величины сигнала Uз.д задаваемого допустимого давления относительно величины сигнала Uном номинального давления. Выход сумматора задатчика 13 соединен с инверсным входом первого алгебраического сумматора 14 и с прямым входом второго алгебраического сумматора 15. На прямой вход первого сумматора 14 подключен выход первого датчика давления 10. На инверсный вход второго сумматора 15 подключен выход второго датчика давления 11. Выход первого сумматора 14 соединен с первым нелинейным блоком 16 с пропорциональной положительной характеристикой. Выход второго сумматора 15 соединен со вторым нелинейным блоком 17 с пропорциональной отрицательной характеристикой. Выход первого нелинейного блока 16 подан на первый прямой вход пропорционального усилителя 18, выход второго нелинейного блока 17 подан на второй инверсный вход усилителя 18. Выход пропорционального усилителя 18 подключен к механизму 8 регулирования гидромотора 7 с переменным рабочим объемом.
Первый нелинейный блок 16 с пропорциональной положительной характеристикой выполнен так, что сигнал на его выходе равен нулю при отрицательном значении сигнала на входе.
Второй нелинейный блок 17 с пропорциональной отрицательной характеристикой имеет сигнал на его выходе, равный нулю при положительном значении сигнала на входе.
Прибор управления 19 имеет первый выход с сигналом Uу1 регулирования скорости вала нагрузки, соединенный с входом механизма 3 регулирования насоса 1, и второй выход с сигналом Uу2 регулирования величины допустимого давления в силовых гидролиниях гидропривода, соединенный со вторым входом выходного сумматора задатчика 13 блока управления 12.
Гидропривод объемного регулирования работает в следующей последовательности.
При отсутствии сигнала управления Uун на входе механизма 3 насос 1 не создает расход рабочей жидкости в гидролиниях 4 и 5. Давления p1 и p2 в гидролиниях 4 и 5 равны давлению подпитки pпп и гидромоторы 6, 7 не создают крутящих моментов. Скорость вала нагрузки равна нулю. Датчики давления 10 и 11 преобразуют давления p1=pпп и p2=pпп в малые по величине сигналы Uд1 и Uд2. Сигналы с датчиков давления 10 и 11 меньше задающего сигнала номинального давления Uзд с выхода задатчика 13. На выходе нелинейных блоков 16 и 17 сигналы Uн1 и Uн2 отсутствуют. На выходе усилителя 18 блока управления 12 сигнала Uум нет. Механизм 8 регулирования гидромотора 7 удерживает его регулирующий орган в нулевом положении. Гидромотор 7 не развивает крутящий момент на своем валу.
При поступлении сигнала управления Uун на вход механизма 3 регулирования рабочим объемом насос 1 подает расход, например, в гидролинию 4 и гидромоторы 6 и 7. Гидромотор 6 постоянного рабочего объема создает крутящий момент Мк1, который вращает вал редуктора 9 с нагрузкой и вал регулируемого гидромотора 7. При нулевом положении регулирующего органа гидромотор 7 имеет рабочий объем Vм2=0, не потребляет рабочую жидкость из гидролинии 4 и не создает момента сопротивления на своем валу. При малом рабочем объеме Vм1 гидромотора 6 гидропривод имеет большую скорость на валу нагрузки редуктора 9 и создает момент кручения на валу 9, пропорциональный давлению р1-р2 в гидролиниях 4 и 5. При малом давлении подпитки (т.е. при p2=рпп≈0) крутящий момент Мк1 гидромотора 6 пропорционален давлению p1.
При увеличении момента сопротивления нагрузки давление p1 увеличивается. Если давление p1 превысит номинальное значение pном, то на выходе алгебраического сумматора 14 в блоке управления 12 появляется положительный сигнал Uδ1, пропорционально которому усилитель 18 формирует сигнал Uум управления на входе механизма 8 регулирования гидромотора 7. С увеличением сигнала Uум регулирующий орган гидромотора 7 отклоняется на соответствующий угол от нулевого положения, рабочий объем Vм2 гидромотора 7 увеличивается. Гидромотор 7 развивает крутящий момент Мк2, действующий дополнительно к крутящему моменту Мк1 гидромотора 6. Суммарный крутящий момент на выходном валу редуктора 9 равен сумме моментов Mк1 и Мк2. Гидромотор 7 отбирает часть рабочей жидкости из гидролинии 4 и скорость выходного вала редуктора 9 уменьшается. Регулирование давления р1 в гидролинии 4 путем увеличения рабочего объема гидромотора 7 обеспечивается до максимального значения момента сопротивления на валу нагрузки.
При изменении знака сигнала управления Uун на входе механизма 3 насос 1 подает рабочую жидкость в гидролинию 5, изменяется направление вращения вала нагрузки. При увеличении момента сопротивления нагрузки другого знака увеличивается давление р2 в гидролинии 5. Регулирование давления р2 относительно номинального значения р2ном выполняется по сигналу второго датчика давления 11 в цепи прохождения его сигнала через второй алгебраический сумматор 15, нелинейный блок 17, второй вход усилителя 18 и механизма регулирования 8 гидромотора 7. Гидромотор 7 развивает крутящий момент на своем валу, направленный одинаково с крутящим моментом гидромотора 6.
При работе гидропривода объемного регулирования, например, в составе подъемных механизмов траловых комплексов целесообразно выполнять управление скоростью нагрузки и величиной допускаемого рабочего давления в гидроприводе по специальным программам. В таких случаях в составе гидропривода применяют прибор управления 19, выходы которого соединены с входом механизма регулирования 3 насоса 1 и со вторым входом сумматора задатчика 13 блока управления 12.
Предлагаемый гидропривод объемного регулирования позволяет повысить эффективность управления величиной допустимого давления в той или другой гидролинии без влияния на эту величину противодавления в противоположной гидролинии, что расширяет функциональные возможности по регулированию крутящего момента и скорости на валу нагрузки и позволяет более рационально компактными гидромашинами с малыми рабочими объемами обеспечить режимы работы гидропривода с большими скоростями при малых моментах нагрузки и с малыми скоростями при больших моментах нагрузки.
В целом применение насоса и двух гидромоторов малых типоразмеров с более рациональным построением блока управления давлениями в гидролиниях путем изменения рабочего объема одного из гидромоторов позволяет улучшить компоновку гидропривода на промышленной установке, снизить массогабаритные параметры гидропривода и экономические показатели его применения.
Предлагаемый гидропривод расширяет функциональные возможности нового типажа парка гидроприводов объемного регулирования.
Источники информации
1. Описание изобретения к патенту RU 2005921.
2. Описание изобретения к патенту RU 2369789.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2008 |
|
RU2369789C1 |
| Стенд для испытаний двух объемных регулируемых гидропередач | 1986 |
|
SU1435859A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| Способ управления объемным гидравлическим приводом и устройство для его осуществления | 1986 |
|
SU1337559A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Стенд для испытания двух объемных регулируемых гидропередач | 1989 |
|
SU1689676A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2014 |
|
RU2561254C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
Гидропривод предназначен для управления различными устройствами подъемно-транспортных и строительно-дорожных машин. Гидропривод состоит из последовательно соединенных регулируемого реверсивного насоса с приводным двигателем и механизмом регулирования рабочего объема, силовых гидролиний, параллельно соединенных первого гидромотора постоянного рабочего объема и второго гидромотора переменного рабочего объема через редуктор с валом нагрузки. В первой и второй силовых гидролиниях установлены первый и второй датчики давления, соединенные с блоком управления давлением в каждой силовой гидролинии путем изменения величины и направления крутящего момента регулируемого гидромотора. Блок управления давлением имеет задатчик с сумматором, формирующим сигнал допустимой величины давления. Блок управления давлением содержит первый нелинейный блок с пропорциональной положительной характеристикой и второй нелинейный блок с пропорциональной отрицательной характеристикой. Предлагаемый гидропривод с регулируемым насосом, двумя гидромоторами и блоком управления давлением позволяет расширить функциональные возможности нового типажа парка гидроприводов объемного регулирования скоростью и крутящим моментом исполнительного вала гидропривода. 3 з.п. ф-лы, 1 ил.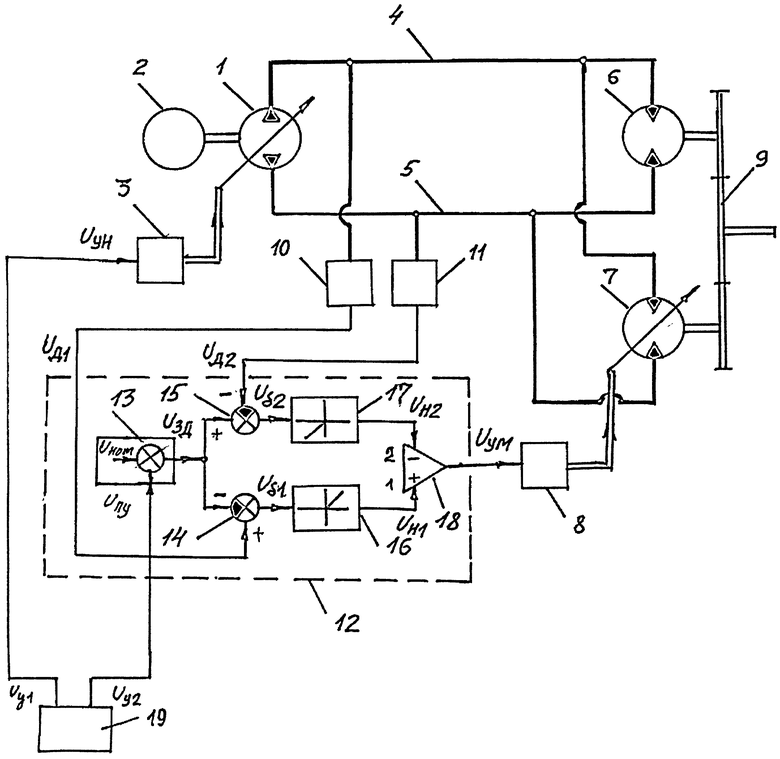
1. Гидропривод объемного регулирования, содержащий регулируемый реверсивный насос с приводным двигателем и механизмом регулирования рабочего объема, связанный силовыми гидролиниями с двумя параллельно соединенными гидромоторами, валы которых соединены редуктором с общей нагрузкой, причем один из гидромоторов выполнен с постоянным рабочим объемом, а другой гидромотор с переменным рабочим объемом снабжен механизмом регулирования рабочего объема, в каждой силовой гидролинии установлен датчик давления, выходы которых соединены с блоком управления, отличающийся тем, что блок управления давлениями в силовых гидролиниях выполнен с задатчиком сигнала номинального давления, выход которого соединен с инверсным входом первого алгебраического сумматора и с прямым входом второго алгебраического сумматора, на прямой вход первого сумматора подключен выход первого датчика давления и на инверсный вход второго сумматора подключен выход второго датчика давления, выход первого сумматора соединен с первым нелинейным блоков с пропорциональной положительной характеристикой, а выход второго сумматора соединен со вторым нелинейным блоком с пропорциональной отрицательной характеристикой; выход первого нелинейного блока подан на первый прямой вход, а выход второго нелинейного блока подан на второй инверсный вход пропорционального усилителя, подключенного к механизму регулирования гидромотора с переменным рабочим объемом.
2. Гидропривод по п.1, отличающийся тем, что в его блоке управления давлением установлен первый нелинейный блок с пропорциональной положительной характеристикой, при которой сигнал на его выходе равен нулю при отрицательном значении входного сигнала.
3. Гидропривод по п.1, отличающийся тем, что в его блоке управления давлением установлен второй нелинейный блок с пропорциональной отрицательной характеристикой, при которой сигнал на его выходе равен нулю при положительном значении входного сигнала.
4. Гидропривод по п.1, отличающийся тем, что содержит прибор управления, первый выход которого с сигналом регулирования скоростью вала нагрузки соединен с механизмом регулирования насоса, а второй выход с сигналом регулирования величины допустимого давления в силовых гидролиниях соединен в блоке управления с сумматором задатчика сигнала допустимого давления.
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2008 |
|
RU2369789C1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД | 1991 |
|
RU2005921C1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| US 4724372 A, 09.02.1988 | |||
| Устройство для защиты концевого инструмента | 1985 |
|
SU1271676A1 |

