Изобретение относится к гидроавтоматике и может быть использовано в системах управления промышленных роботов и манипуляторов.
Целью изобретения является повьйпе- ние точности и устойчивости.
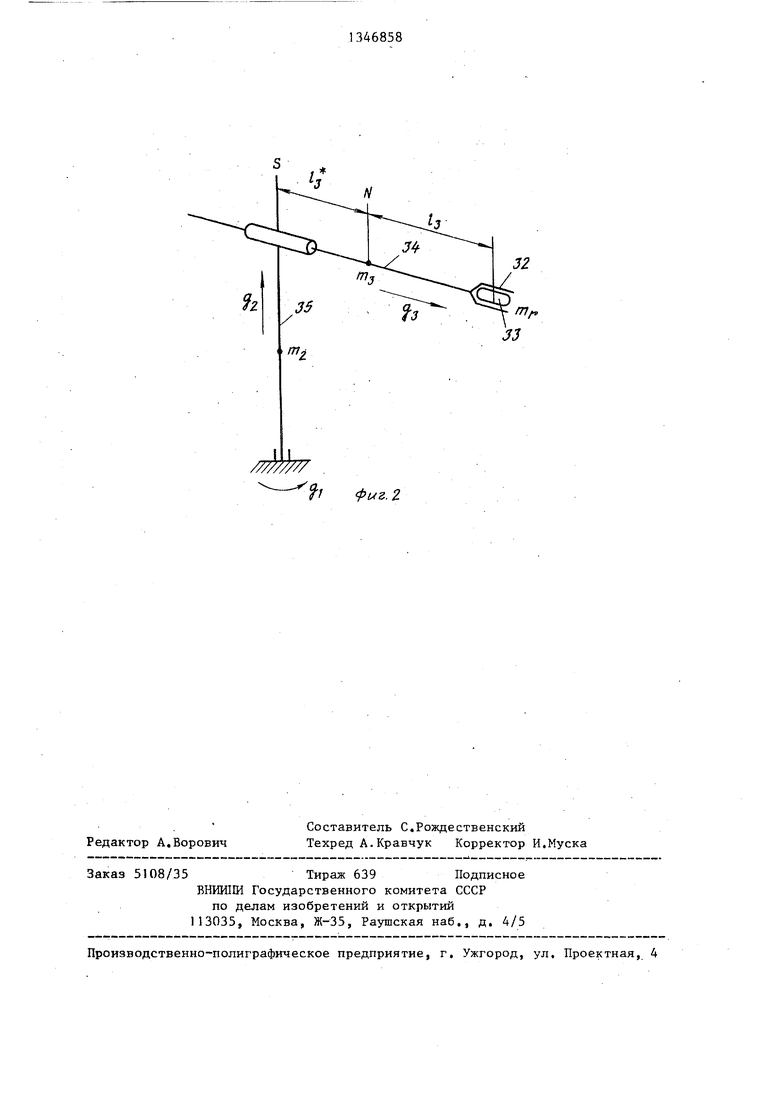
На ,фиг.1 изображена схема электрогидравлического следящего привода; на фиг,2 - схема объекта управления.
Электрогидравлический следящий привод содержит задатчик (не показан последовательно соединенные измеритель 1 рассогласования, первое и второе дифференцирующие звенья 2 и 3 с замедлением, первый блок 4 умножения, первый сумматор 5, первый усилитель 6, привод 7 регулирующего органа (не показан) насоса 8, связанного гидролиниями 9 и 10 с гидромотором 11, выходной вал 12 которого механически соединен с объектом управления и с датчиком 13 положения вала 12, подключенным своим выходом к второму входу измерителя 1 рассогласования, выход которого через апериодическое Эвено 14 второго порядка подключен также к второму входу первого сумматора 5, последовательно соединенные второй сумматор 15, первый квадратор 16, второй блок 17 умножения и третий сумматор 18, последовательно соединенные четвертый сумматор 19, пятый сумматор 20 и третий блок 21 умножения, а также первый, второй и
3
третий источники 22, 23 и 24 соответственно опорного напряжения, датчик 25 положения горизонтального звена, датчик 26 скорости перемещения горизонтального звена датчик 27 усилия, четвертый блок 28 умножения и второй квадратор 29, причем выход первого источника 22 опорного напряжения подключен к первым входам втоПервый вход сумматора 20 имеет коэффициент усиления, пропорциональный двум массам звеца 34, а второй - 35 коэффициент усиления, равный двум. Датчик 27 служит для формирования сигнала, пропорционального массе груза 33.
40
На фиг, 1 и 2 обозначены параметры; g, - сигнал желаемого положения от задатчика; g;, g , g - соответствующие обобщенные координаты звеньев 34 и 35 объекта управления; g, - скорого и четвертого сумматоров 15 и 19, рость изменения обобщенной координас/ .- ошибка привода (величина расвторые входы которых соединены с выходом датчика 25 положения горизонтального звена, выход второго источника 23 опорного напряжения подключе.н к третьему входу второго сумматора 15, выход которого соединен также с первым входом четвертого блока 28 умножения, второй вход которого подключен к выходу датчика 27 и одно50
ты;
согласования}; т, и, т, - соответственно массы звеньев 35, 34 и захваченного груза 33; it - исходное расстояние от оси вращения горизонтального звена 34 до его центра масс при gj 0; .Ij расстояние от центра масс горизонтального звена 34 до
Mg - МОсредней точки схвата 32;
временно к второму входу второго бло- 65 ментное воздействие на выходной вал ка 17 умножения, а его выход - к вто- 12,
рому входу пятого сумматора 20, вто- Электрогидравлический следящий при:- рой и третий входы третьего сумматора . вод работает следующим образом
5
10
15
468582
18 соединены соответственно с выходом третьего источника 24 опорного напряжения и через второй.квадратор 29 - с выходом четвертого сумматора 19, второй вход третьего блока 21 умножения подключен к выходу датчика 26 скорости горизонтального звена.
Кроме того, он содержит последовательно соединенные пятый блок 30 ЗПУ1ножения и апериодическое звено 31 первого порядка, выход которого под ключей к третьему входу первого сумматора 5, первый вход пятого блока 30 умножения соединен с выходом третьего блока 21 умножения, а второй вход- с выходом первого дифференцирующего звена 2, второй вход первого блока 4 умножения подключен к выходу третьего сумматора 18,
Объект управления имеет, например, схват 32 для захвата груза 33, горизонтальное звено 34 и вертикальное звено 35, Звенья 2, 3 и 14 образуют корректирующее устройство. Гидромотор 11 связан с валом 12 редуктором (не показан). Первый и второй входы сумматора 18 имеют коэффициенты уси- ления, равные единице, а третий - коэффициент усиления, пропорциональ-- ный массе звена 34,
Первый вход сумматора 20 имеет коэффициент усиления, пропорциональный двум массам звеца 34, а второй - 35 коэффициент усиления, равный двум. Датчик 27 служит для формирования сигнала, пропорционального массе груза 33.
20
25
30
На фиг, 1 и 2 обозначены параметры; g, - сигнал желаемого положения от задатчика; g;, g , g - соответствующие обобщенные координаты звеньев 34 и 35 объекта управления; g, - скорость изменения обобщенной координас/ .- ошибка привода (величина рас
ты;
согласования}; т, и, т, - соответственно массы звеньев 35, 34 и захваченного груза 33; it - исходное расстояние от оси вращения горизонтального звена 34 до его центра масс при gj 0; .Ij расстояние от центра масс горизонтального звена 34 до
Mg - МОсредней точки схвата 32;
ментное воздействие на выходной вал 12,
I .- момент инер вращающегос ла гидромото 11 и вращающи частей редук ра (приведен . к валу гидро мотора ),
10
Учитьшая, что
31346858
Сигнал rf через усилитель 6 поступает на привод 7 регулируюп1его органа насоса 8, который, создавая поток рабочей жидкости в гидролиниях 9 (- и 10, воздействует на гйдромотор 11, выходной вал 12 которого изменяет положение объекта регулирования, уменьшая рассогласование сГ, Электрогидравлический привод при работе с различными грузами, а также за счет взаимовлияния степеней подвижности, обладает переменными моментными характеристиками, которые, как правило,
изменяются в широких пределах, что 15 +m(i +85+13)6, существенно снижает качественные показатели работы электрогидравлического привода и может приводить к потере устойчивости.
Для качественного управления коор-20 . м + V + + 4- динатой g необходимо компенсировать з &з i&s г 5 з ё-),7 g,
ат
-а1, ()ё,+И1з(1 +Sз) g,+
dЭT
(Is+lN)g,+m3(,)g,+
dtSg
отрицательное влияние изменения координат gj и gj на динамические свойства привода. Кинетическая энергия Т всех движущихся масс представляется в виде:
jrp
+2m,(,+l,), |i- О,
I,g Т .
I
3 S,
( 5).g2 + ,
где ( )- момент инерции
горизонтального
можно считать, что моментное воздей- 25 ствие со стороны движущихся масс
имеет вид:
I г 5 (т,,+та) g, Мб H(gj,mr)g,+h(g,g3,mr)g,,(l) ++ где H(g3,mr)m3(i; +g3)+mr(l,,+lj+gJ H
+ IK +1,; hlgj ,ёз ,m ()4m( g, .
Передаточная функция привода может быть представлена в виде: g. (t)
W(P)W(P)Wp(P)W (DWJF),
30
35
звена 34 при вращении вокруг вертикального звена 35 со скоростью g, ; 40
t(t,
(3)
Ij.m(l )- момент инерции
груза 33 относительно вертикальной оси врагде Р - символ дифференцирования; W(P) - передаточная функция привода; W.,(P}, Wp(P) - соответственно передаточные
функции усилителя 6 и регулирующего органа насоса 8;
щения (верти- 45 к) передаточная функция коррек- кального звена 35); - момент инерции
вертикальногои гидромотора 11,
Звена 35 массой gQ Момент, развиваемый гидромотором
т, относительно 11, равен:
Mr«(t)0,01WgP i; g, +Mg/ip, при Mc(t)0,(4)
где , - момент сопротивлений; gg - перепад давлений рабочей жидкости в гидролиниях 9 и 10;
ip - передаточное отношение редуктора;
тирующего устройства; (P)7 передаточная функция гидропередачи, состоящей из насоса 8
продольной оси; - момент инерции горизонтального звена 34 массой т, относительно поперечной оси, проходящей через центр масс;
.- момент инерции . вращающегося вала гидромотора 11 и вращающихся частей редуктора (приведены . к валу гидромотора ),
10
Учитьшая, что
(- ат
-а1, ()ё,+И1з(1 +Sз) g,+
+m(
dЭT
+m(i +85+13)6,
(Is+lN)g,+m3(,)g,+
dtSg
jrp
+2m,(,+l,), |i- О,
30
W(P)W(P)Wp(P)W (DWJF
t(t,
(3)
к) передаточная функция коррек-
тирующего устройства; (P)7 передаточная функция гидропередачи, состоящей из насоса 8
51346858
V- - характерный объем гидромотора II,
С учетом выражений (l) и (2) соотношение (4) примет вид:
0,(lip +H/ip)g, + (h/ip)g,.(5) Из выражения 5 следует, что
(H/ip+Iip)P
h
В результате передаточная функция примет вид:
КХЕ Wgip VP ToOh
rм(p)
(6)
где -Yi - угол поворота регулирующего органа йасоса 8,
W . нЛдб
К
Т,.
; Kg constj -у --const,
WH, «.. V коэффициенты пропорциональности;
характерный объем насоса 8; скорость вращения насоса 8; объем рабочей жидкости в гидролинии 9 нагнетания и полост нагнетания насоса 8, Из выражения (6.) видно, что пара- метры передаточной функции нгп являются существенна переменными и зависят от величин H(gj.,mr) и h(g lse jPi ). В результате могут значительно изменяться и динамические свойства электрогидравлического следящего привода при изменении g,, П|. в широких пределах, а в отдельных случаях возможна даже потеря устойчивости его работы.
6
Для сохранения неизменными динамических свойств электрогидравлического привода коррекция ) осуществляется с помощью апериодического звена 14 второго порядка с передаточной функцией
I
,, (Р)
10
() (TjP+l.)
5
где , - постоянные времени двух дифференцирующих звеньев 2 и 3 с замедлением,
причем ) и Wj (Р) имеют вид
W5(P)
К,Р
(Т,Р+1) 100V
W,(P)
(TjP+l)
0
. 1
IP
5
где К,К,
а также апериодического звена 31 редаточной функцией К
W,. (Р) -- ;
(ТгР+1)
с пе
31
где K,Kj - постоянные коэффициенты. Параметры Т и Tj выбирают достаточно малыми с целью придания приводу необходимых динамических свойств.
Для непрерьшной подстройки параметров коррекгщи WH(P) по текущим значениям HCgjjmp), h(g3,gj,n) на вторые входы блоков 4 и 30 подаются сигналы, соответственно пропорциональные величинам Н + I и h. Сигналы, пропорциональные Н + I и h формируются следующим образом. Измеряя с помощью датчика 25 положения значение g и складывая его с помощью второго сумматора 15 со значениями 1 и Ij, получаемыми соответственно на выходах первого к второго источников 22 и 23 опорного напряжения, на выходе этого сумматора формируется сигнал, пропорциональный g,+l.+i а на выходе четвертого сумматора 19 - сигнал, пропорциональный g,+l. Сигнал g, +1 подается на второй квадратор 29, а. сигнал - на первый квадратор 16, и перемножается выходной сигнал квадратора 16 на сигнал й с выхода датчика 27. В результате с учетом того, что третий источник 24 опорного напряжения вырабатывает сигнал, пропорциональный величине ,, на выходе третьего сумматора 18 формируется сигнал
m
;(l5 -bgj) +m,(l ) +1
+ H+i I.
Ha выходе четвертого блока 28 умножения формирз ется сигнал, пропорциональный т(1 +1з+ёэ) выходе пятого сумматора 20 - сигнал, пропорциональный .tri(l +lj+gj) + +gj). После перемножения сигналов с выходов сумматора 20 и датчика 26 на выходе третьего блока 21 умножения сигнал соответствует выражению для h (2).
Таким образом, с учетом вида передаточных функций Wj(P)-, WgCP), W,Jp) и W(P) на выходе первого сумматора 5 будем иметь сигнал
. (Т,Р+1) (TjP+l)
В результате передаточная функция корректирующего устройства W(P) будет иметь вид
Wk(P)100V(H+Ii ) lOOVh
KEwrir p P
J PKiW i
(T/P+l) (TjP+l)
(7)
a передаточная функция прямой цепи разомкнутого привода с учетом соотно шений 6 и 7 - вид
K/(Wa ) W(P)W(P)Wp(P) ,, (8j
(T p+OlTjp+i)
Из выражения (8) видно, что все параметры передаточной функции (Р) при введении коррекции ц(Р) остаются постоянными, а следовательно, постоянными будут сохраняться и динамические свойства и качественные показатели всего электрогидравлического привода в целом, т.е. точность и устойчивость не будут зависеть от изменения нагрузочных характеристик HCgjjin) и h(gj ,g jjifi J.), т.е. будет обеспечиваться инвариантность к изменению нагрузочных характеристик. Формула и 3 о б р е т е н и я
50 умножения и апериодическим звеном первого порядка, выход последнего подключен к третьему входу первого сумматора, первый вход пятого блока умножения соединен с выходом третьего
1. Электрогидравлический следящий привод, содержащий насос,гидромотор,а также последовательно соединенные из- gg блока умножения, а второй вход - с меритель рассогласования, первое и выходом первого дифференцирующего
второе дифференцирующие звенья с за-звена, причем второй вход первого бломедлением, первый блок умножения,ка умножения подключен к выходу трепервый сумматор, первый усиЛитель итьего сумматора.
8
привод регулирующего органа насоса, связанного гидролиниями с гидромотором, вал которого соединен с объектом g управления, имеющим горизонтальное звено, и датчиком положения вала, подключенным выходом к входу измерителя рассогласования, другой вход которого связан с задатчиком, а выход
10 через апериодическое звено второго порядка подключен к входу первого сумматора, о тличающийся тем, что, с целью повышения точности и устойчивости, он снабжен последова15 телкко соединенными вторым сумматором, первьм квадратором, вторым блоком умножения и третьим сумматором, последовательно соединенными четвертым и пятым сумматорами и третьим
20 блоком умножения, а также тремя источниками опорного напряжения, датчи ками положения и скорости горизонталь- ного звена, датчиком усилия, четвертым блоком умножения и вторым квадра25 тором, причем выход первого источника опорного напряжения подключен к первым входам второго и четвертого сумматоров, вторые входы которых соединены с выходом датчика положения го- 30 ризонтального звена, выход второго
источника опорного напряжения подключен к третьему, входу второго сумма- . тора, выход которого соединен с первым входом четвертого блока умножения,
25 второй вход последнего подключен к выходу датчика усилия и второму входу второго блока умножения, а выход - к второму входу пятого сумматора, второй вход третьего сумматора соединен
40 с выходом третьего источника опорного напряжения, третий вход через второй квадратор - с выходом четвертого сумматора, при этом второй ВХОД третьего блока умножения подключен к выходу
45 датчика скорости горизонтального звена.
2. Привод ПОП.1, о тличающийся тем, что он снабжен послег; довательно соединенными пятым блоком
50 умножения и апериодическим звеном первого порядка, выход последнего подключен к третьему входу первого сумматора, первый вход пятого блока умножения соединен с выходом третьего
gg блока умножения, а второй вход - с выходом первого дифференцирующего
/ . 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1987 |
|
SU1432280A2 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод робота | 1989 |
|
SU1723360A1 |
| Электрогидравлический следящий привод робота | 1988 |
|
SU1557371A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1195076A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1250740A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
Изобретение позволяет повысить точность и устойчивость системы управления . Привод содержит задатчик, измеритель 1 рассогласования, дифференцирующие звенья 2, 3, с замедлением, блоки 4, 17, 21, 28, 30 умножения, сумматоры 5, 15, 18,.19, 20, усилитель 6, привод 7 регулирующего органа насоса 8, гидромотор 11, датчик 13 положения вала 12, апериодическое звено 14 второго порядка, квадраторы 16, 29, источники 22, 23, 24 опорного напряжения, датчики положения горизонтального звена 25 и скорости его перемещения 26, датчик 27 усилия, апериодическое звено 31 первого порядка. Система позволяет при работе с различными грузами сохранить постояннь1ми все параметры передаточной функции привода при введении передаточной функции корректирующего устр-ва. Это приводит к сохранению постоянными динамических св-в и качественных показателей всего электрогидравлического привода в целом. 1 з.п. ф-лы, 2 ил. (Л HS 00 4 О5 СХ) ел 00
Редактор А.Ворович
Составитель С.Рождественский
Техред А.Кравчук Корректор И.Муска
Заказ 5108/35Тираж 639 Подписное
ВНИИ11И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
