Изобретение относится к авиационной технике, в частности к автоматическому управлению ГТД в составе многодвигательной силовой газотурбинной установки.
Известен способ регулирования газотурбинных двигателей в процессе разгона путем измерения параметров режима работы двигателя, в качестве которых принимают либо давление воздуха за компрессором и частоту вращения ротора двигателя, либо частоту вращения газогенератора и температуру воздуха на входе в компрессор, сравнения измеренной величины параметра с заданной, формирования программы регулирования расхода топлива в соответствии с измеренным параметром, перемещения дозирующего элемента пропорционально величине отклонения текущего расхода топлива от заданного по программе.
Известные способы не обеспечивают требуемого качества переходных процессов по тяге двигательной установки, так как отсутствует согласованность программ регулирования газогенератора и винтовентилятора на переходных режимах.
Наиболее близким из известных технических решений является способ автоматического управления силовой турбовинтовой установкой, заключающийся в измерении параметров режима работы двигателя и винта. Управляют расходом топлива на установившемся режиме пропорционально отклонению частоты вращения ротора турбокомпрессора от заданного значения. На переходном режиме определяют ускорение ротора турбокомпрессора и управляют расходом топлива пропорционально отклонению ускорения турбокомпрессора от заданного значения. В качестве параметра режима работы винта используют измеренную частоту вращения винта, сравнивают измеренное значение с заданным и по величине отклонения управляют углом установки лопасти винта таким образом, чтобы значение частоты вращения винта сравнялось с заданной.
Данный способ не обеспечивает требуемого качества переходных процессов по тяге двигательной установки, так как отсутствует согласованность программ регулирования газогенератора и винтовентилятора на переходных режимах. Также данный способ не обеспечивает регулирования приемистости многодвигательной СУ, исключающее разнотяговость двигателей. При регулировании одного турбовинтового двигателя на переходных режимах в известном техническом решении возникает следующее нежелательное явление: характер протекания переходных процессов по тяге будет зависеть от выработки ресурса двигателя и винта.
Целью изобретения являются повышение динамической точности регулирования и обеспечение стабильности и монотонности переходных процессов по тяге двигательной установки на переходных режимах. Указанная цель достигается тем, что при способе автоматического управления турбовинтовой или турбовентиляторной двигательной установкой измеряют текущее значение параметра, характеризующего установившиеся режимы работы двигателя - частоту вращения турбокомпрессора, определяют ускорение ротора турбокомпрессора, сравнивают измеренный текущий параметр установившегося режима с заданным значением, сравнивают ускорение ротора турбокомпрессора с заданным, управляют расходом топлива на установившихся режимах пропорционально сигналу рассогласования измеренного параметра установившегося режима, а на переходных режимах - пропорционально сигналу рассогласования ускорения ротора турбокомпрессора. Управляют углом установки лопасти винта в соответствии с отклонением измеренного сигнала частоты вращения лопастей винта от заданного. Дополнительно вводят в управление лопастью винта канал регулирования по ускорению винта. Для этого измеряют ускорение винта, формируют заданную программу ускорения винта, сравнивают измеренное значение ускорения винта с заданным по программе и управляют углом установки лопасти на переходных режимах пропорционально величине отклонения текущего значения ускорения винта от заданного программой.
Аналогов, содержащих отличительные признаки заявляемого технического решения, не выявлено.
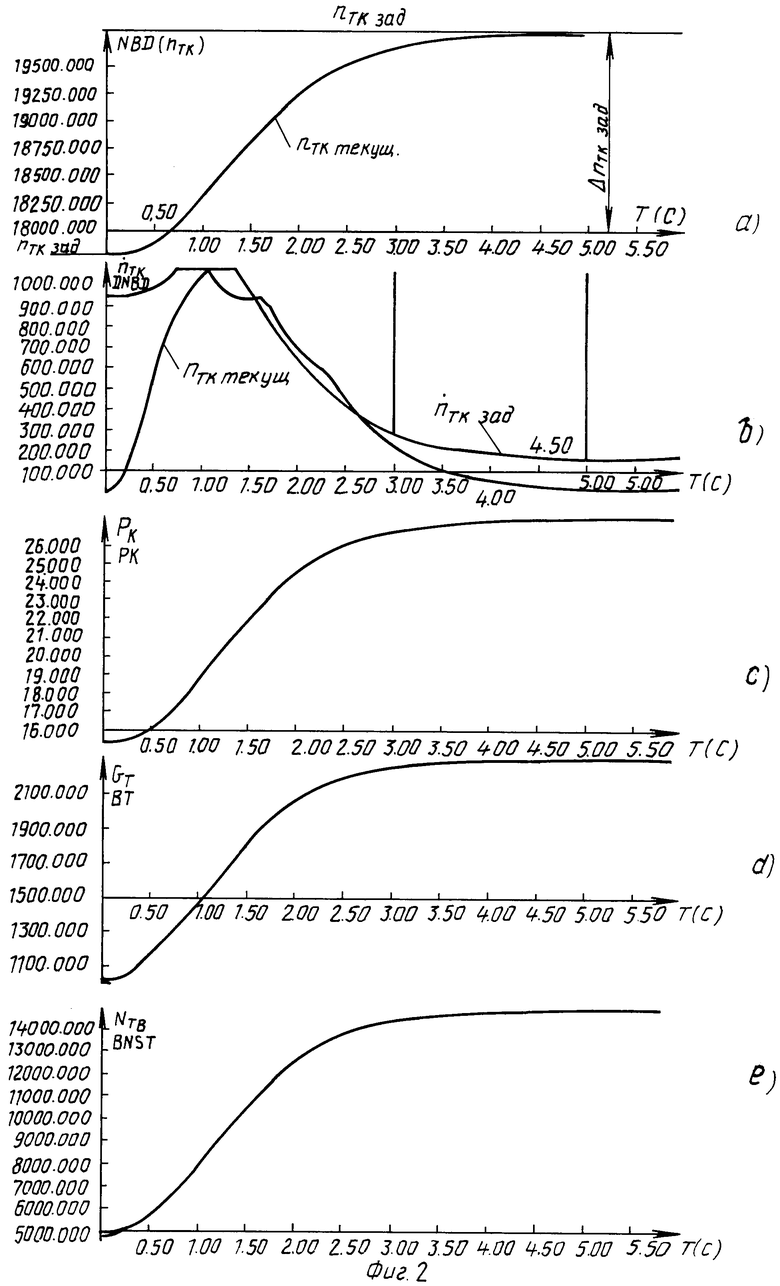
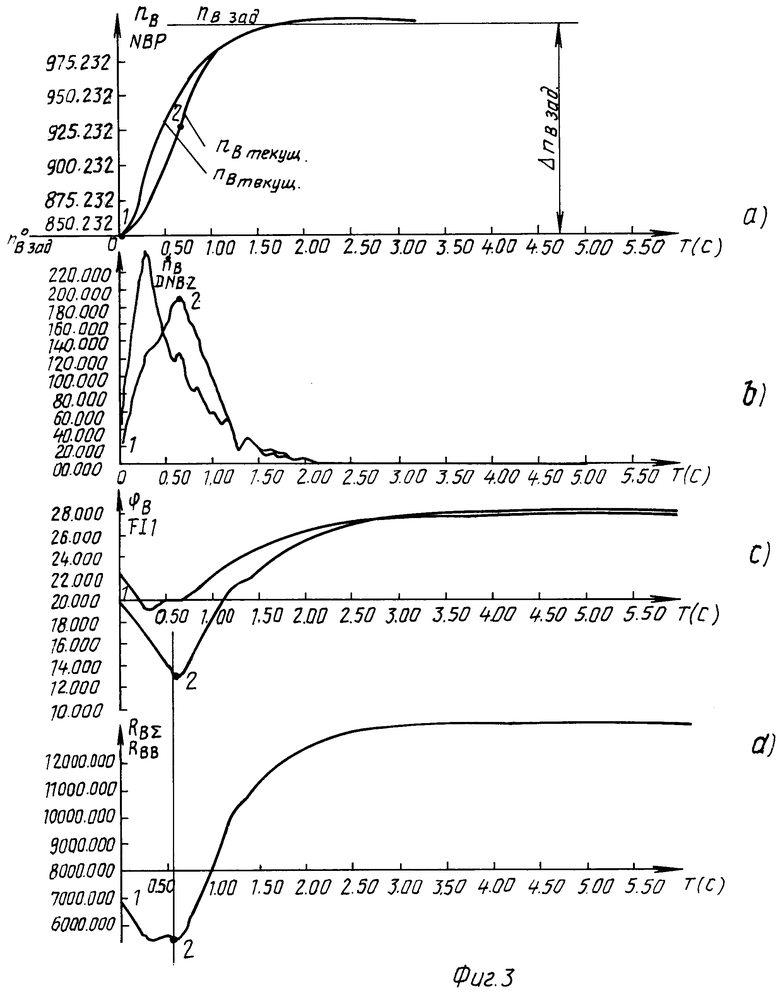
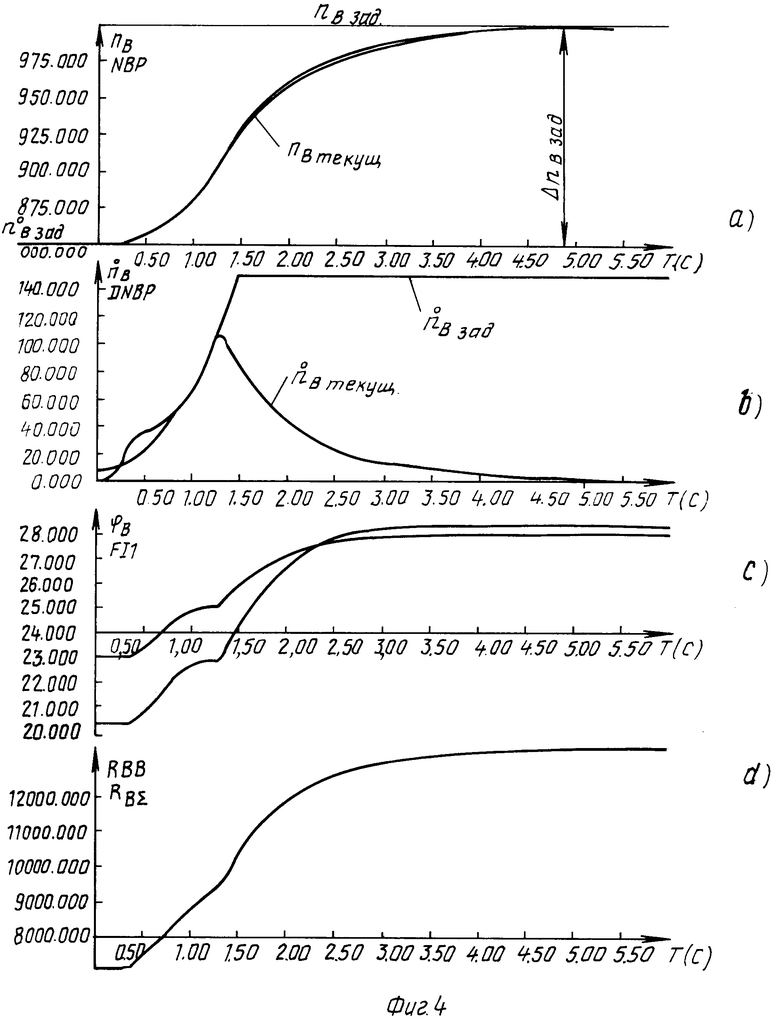
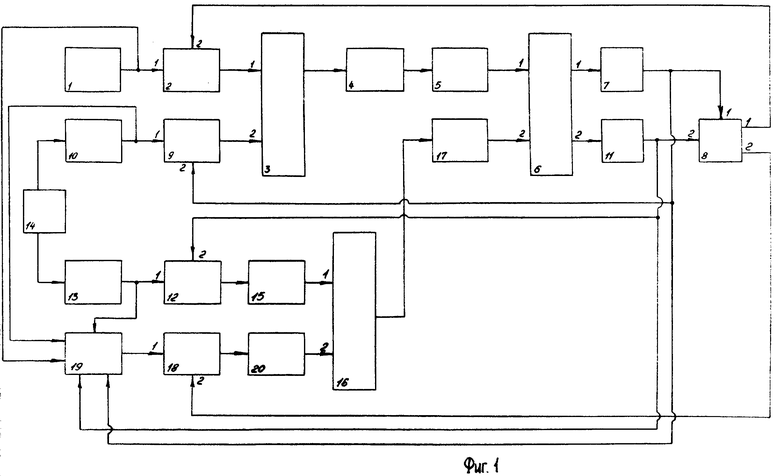
На фиг. 1 представлена функциональная схема системы автоматического управления турбовинтовентиляторной установкой, как возможный пример реализации предложенного способа; на фиг. 2 и 3 - переходные процессы при работе САУ по схеме прототипа; на фиг. 4 - переходные процессы предложенного способа.
Система, реализующая способ, содержит задатчик параметра динамических режимов двигательной установки (ДУ) - ускорения ротора турбокомпрессора 1, выход которого соединен с первым входом элемента сравнения 2, выход которого соединен с первым входом селектора минимума 3. Выход селектора минимума 3 через формирователь управляющего сигнала 4, исполнительный механизм (дозатор топлива) 5 соединен с первым входом двигательной установки (ДУ) 6. Выход датчика частоты вращения турбокомпрессора 7, выход которого соединен с первым выходом ДУ 6, через первый вход дифференциального звена 8 соединен с вторым входом элемента 2. Выход датчика частоты вращения ротора турбокомпрессора 7 соединен с вторым входом элемента сравнения 9, первый вход которого соединен с задатчиком параметра режима двигательной установки - частоты вращения ротора турбокомпрессора 10. Выход элемента сравнения 9 соединен с вторым входом селектора минимума 3. Выход датчика частоты вращения винтовентилятора 11, вход которого соединен с вторым выходом ДУ 6, соединен с вторым входом элемента сравнения 12, первый вход которого соединен с выходом задатчика частоты вращения винта 13, вход которого соединен с первым выходом датчика угла установки РУД 14, второй выход которого соединен с входом задатчика 10. Выход элемента сравнения 12 через формирователь управляющего сигнала 15 соединен с первым входом селектора минимума 16. Выход селектора минимума 16 через исполнительный механизм 17 соединен с вторым входом двигательной установки (ДУ) 6. Выход датчика частоты вращения винта 11 через второй вход дифференциального звена 8 соединен с вторым входом элемента сравнения 18, первый вход которого соединен с задатчиком ускорения винта 19, первый вход которого соединен с выходом задатчика частоты вращения ротора турбокомпрессора 10, второй - с выходом датчика частоты вращения турбокомпрессора 7, третий - с выходом задатчика частоты вращения винта 13, четвертый - с выходом датчика частоты вращения винта 11. Выход элемента сравнения 18 через формирователь управляющего сигнала 20 соединен с вторым входом селектора минимума 16.
Способ реализуется следующим образом.
При работе ДУ 6 на установившихся режимах селектор минимума 3 пропускает сигнал рассогласования с элемента сравнения 9, а селектор минимума 16 пропускает сигнал рассогласования с элемента сравнения 12. При работе ДУ 6 на переходных режимах, т. е. при перемещении РУД в новое установившееся положение, характеризующее новый режим работы ДУ 6, происходит выбор селектором минимума 3 сигнала рассогласования с элемента сравнения 2, а селектором минимума 16 сигнала рассогласования - с элемента сравнения 18. Таким образом канал регулирования ускорения ротора турбокомпрессора, управляя расходом топлива пропорционально отклонению текущего значения ускорения ротора турбокомпрессора ( ) от заданного, обеспечивает поддержание заданного закона по ускорению ротора турбокомпрессора. В тоже время канал регулирования ускорения винта (
) от заданного, обеспечивает поддержание заданного закона по ускорению ротора турбокомпрессора. В тоже время канал регулирования ускорения винта ( ), управляя лопастью винта пропорционально отклонению текущего значения ускорения винта от заданного, обеспечивает поддержание заданного закона по ускорению винта
), управляя лопастью винта пропорционально отклонению текущего значения ускорения винта от заданного, обеспечивает поддержание заданного закона по ускорению винта  . При этом заданную величину ускорения винта
. При этом заданную величину ускорения винта  формируют пропорционально величин перестройки заданного значения частоты вращения винта nвзад и заданному значению ускорения ротора турбокомпрессора (
формируют пропорционально величин перестройки заданного значения частоты вращения винта nвзад и заданному значению ускорения ротора турбокомпрессора ( ) и обратно пропорционально величине перестройки заданного значения частоты вращения ротора турбокомпрессора. Тем самым обеспечивается согласованность программ регулирования газогенератора и винтовентилятора на переходных режимах, что обеспечивает динамическую точность регулирования, стабильность и монотонность переходных процессов по тяге двигательной установки на переходных режимах. Также положительный особенностью данного способа регулирования является обеспечение постоянства динамических характеристик объекта регулирования по мере выработки ресурса двигателя и винта и, как следствие этого, регулирование приемистости многодвигательной СУ, исключающее разнотяговость двигателей.
) и обратно пропорционально величине перестройки заданного значения частоты вращения ротора турбокомпрессора. Тем самым обеспечивается согласованность программ регулирования газогенератора и винтовентилятора на переходных режимах, что обеспечивает динамическую точность регулирования, стабильность и монотонность переходных процессов по тяге двигательной установки на переходных режимах. Также положительный особенностью данного способа регулирования является обеспечение постоянства динамических характеристик объекта регулирования по мере выработки ресурса двигателя и винта и, как следствие этого, регулирование приемистости многодвигательной СУ, исключающее разнотяговость двигателей.
С целью подтверждения положительного эффекта заявляемого решения был проведен ряд расчетов на динамической модели реального ТВВД.
На фиг. 2 и 3 представлены переходные процессы по параметрам газогенератора и винта на режимах приемистости ДУ при работе САУ по схеме прототипа. При перестройке задатчика режима работы ДУ nрткзад = f(dруд) (см. фиг. 2, а) приемистость ДУ осуществляется по программе (dnртк/dt)зад (см. фиг. 2, в) с воздействием на Gт (см. фиг. 2, d). Также происходит соответственное изменение других параметров ДУ, например давление за компрессором (см. фиг. 2, с) и мощности на турбине винта (см. фиг. 2, е). При этом параметры винта (моделировалась работа ТВВД с соосным винтовентилятором) прототипа на переходных режимах ведут себя следующим образом - происходит скачкообразная перестройка задатчика частоты вращения винта nвзад = = f(dруд) (см. фиг. 3, а). При этом регулятор винта с максимально возможной скоростью изменения частоты вращения винта (см. фиг. 3, в участок 1-2), уменьшая угол установки лопасти винта (см. фиг. 3, с участок 1-2), стремится выйти на заданные частоты вращения, т. е. на участке 1-2 (см. фиг. 3, а) увеличение частоты вращения винта идет не за счет роста мощности на турбине винта, а за счет облегчения (уменьшения угла установки лопасти винта). Это происходит вследствие несогласованности динамики управления газогенератором и винтом, что приводит к существенным провалам по тяге винта (моделировалась суммарная тяга винтов) в первоначальный момент приемистости ДУ (см. фиг. 3, d).
В предложенном способе протекание процессов приемистости в газогенераторе ДУ аналогично прототипу (см. фиг. 2). Регулирование текущей частоты вращения винта (см. фиг. 4, а) в отличие от прототипа осуществляется по программе (dnв/dtзад) (см. фиг. 4, в), заданной исходя из необходимых темпов приемистости газогенератора. Такое регулирование винта приводит к отсутствию провалов по углу установки лопасти винта (см. фиг. 4, с), что обеспечивает монотонность переходных процессов по винтовой тяге (см. фиг. 4, d).
Таким образом, технико-экономическими преимуществами изобретения по сравнению с прототипом являются повышение динамической точности регулирования и обеспечение стабильности и монотонности переходных процессов по тяге двигательной установки на переходных режимах.
(56) Заявка Японии N 62-14696, кл. F 02 C 9/28, 1987.
Шевяков А. А. Теория автоматического управления силовыми установками летательных аппаратов. М. : Машиностроение, 1976, с. 210, рис. 7.13.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1989 |
|
SU1759070A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1732734A1 |
| СПОСОБ ПОЛУНАТУРНОГО ИССЛЕДОВАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ | 1992 |
|
RU2039963C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2022 |
|
RU2774564C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| ВЕТРОАГРЕГАТ | 1993 |
|
RU2065993C1 |
| СПОСОБ УПРАВЛЕНИЯ ДОЗИРУЮЩЕЙ ИГЛОЙ РЕГУЛЯТОРА РАСХОДА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
SU1780364A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ДИНАМИЧЕСКИХ РЕЖИМАХ РАЗГОНА И ДРОССЕЛИРОВАНИЯ | 2006 |
|
RU2337250C2 |
Использование: авиационная техника. Автоматическое управление газотурбинными двигателями в составе многодвигательной силовой установки. Сущность изобретения: управление расходом топлива пропорционально отклонению текущего значения ускорения от заданного обеспечивает поддержание заданного закона по ускорению ротора турбокомпрессора. Управление лопастью винта пропорционально отклонению текущего значения ускорения винта от заданного обеспечивает поддержание заданного закона по ускорению винта. Заданную величину ускорения винта формируют пропорционально величине перестройки заданного значения частоты вращения винта к заданному значению ускорения ротора и обратно пропорционально величине перестройки заданного значения частоты вращения ротора. Этим обеспечивается согласованность программ регулирования газогенератора и винтовентилятора на переходных режимах. 4 ил.
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ путем измерения частоты вращения и ускорения ротора турбокомпрессора и частоты вращения винта, сравнения измеренной частоты вращения ротора турбокомпрессора и частоты вращения винта с заданными и изменения на установившихся режимах расхода топлива пропорционально величине отклонения частоты вращения ротора турбокомпрессора от заданной величины и угла установки лопасти винта пропорционально измеренной частоте вращения винта, перестройки заданных значений частот вращения ротора турбокомпрессора и винта на переходных режимах в зависимости от угла установки рукоятки управления двигателем, сравнения измеренного ускорения ротора турбокомпрессора с заданным и изменения на переходных режимах расхода топлива пропорционально величине отклонения ускорения ротора турбокомпрессора от заданной величины, отличающийся тем, что, с целью повышения динамической точности регулирования и обеспечения стабильности и монотонности переходных процессов по тяге двигательной установки, измеряют величину перестройки заданного значения частоты вращения ротора турбокомпрессора, величину перестройки заданного значения частоты вращения винта и ускорение винта, формируют заданную величину ускорения винта пропорционально величине перестройки заданного значения частоты вращения винта и заданному значению ускорения ротора турбокомпрессора и обратно пропорционально величине перестройки заданного значения частоты вращения ротора турбокомпрессора, сравнивают ускорение винта с заданной величиной и изменяют угол установки лопасти винта на переходных режимах пропорционально величине отклонения текущего значения ускорения винта от заданного.
