Изобретение относится к средствам и способам виброзащиты объектов в различных областях техники, в частности в транспортном машиностроении.
Известен виброизолятор с регулируемой жесткостью [1] , в котором управление жесткостью упругого элемента осуществляется с целью стабилизации положения виброизолирующего объекта и на основе измерения относительного смещения опорного основания и виброизолирующего объекта.
Основным недостатком такого способа управления жесткостью упругого элемента является невозможность исключения резонансных режимов колебаний виброизолируемого объекта.
Известна автоматическая система управления жесткостью [2] упругого элемента гасителя колебаний, в которой управление жесткостью упругого элемента осуществляется с целью изменения частоты собственных колебаний гасителя колебаний на основе измерения вибраций массы гасителя колебаний и объекта защиты с помощью соответствующих датчиков и обеспечения сдвига фаз сигналов, поступающих с датчиков вибраций.
Данный способ управления жесткостью упругого элемента также не позволяет исключить резонансные режимы колебаний защищаемого объекта без применения динамических гасителей клебаний.
Известен способ управления диссипативной силой пневматического управляемого амортизатора [3] , заключающийся в том, что величина диссопативной силы устанавливается в зависимости от направления и амплитуды движения объекта виброзащиты.
Однако такой способ не может быть применен для управления жесткостью упругого элемента амортизатора.
Наиболее близким по принципу действия к предлагаемому способу управления жесткостью амортизатора является способ управления демпфированием амортизатора, реализованный в известном устройстве для управления демпфирующей силой в амортизаторе [4] , заключающийся в том, что измеряют частоту вынужденных колебаний объекта виброзащиты, с помощью полосовых фильтров резонансных и нерезонансных частот вырабатывают соответствующие сигналы, сравнивают их по величине и в зависимости от результата сравнения устанавливают величину демпфирующей силы: если сигнал с резонансных фильтров превышает сигнал с нерезонансных, то демпфирование увеличивают, в противном случае уменьшают.
Такой способ управления демпфированием приемлем и для управления жесткостью упругого элемента амортизатора с целью предотвращения резонансных режимов колебаний. Однако он может быть реализован только для ограниченного числа резонансных частот из-за ограниченных возможностей полосовых фильтров, недостаточно чувствителен для своевременного определения начала резонансного режима колебаний и быстрого его устранения.
Цель изобретения - повышение эффективности предотвращения резонансных режимов колебаний.
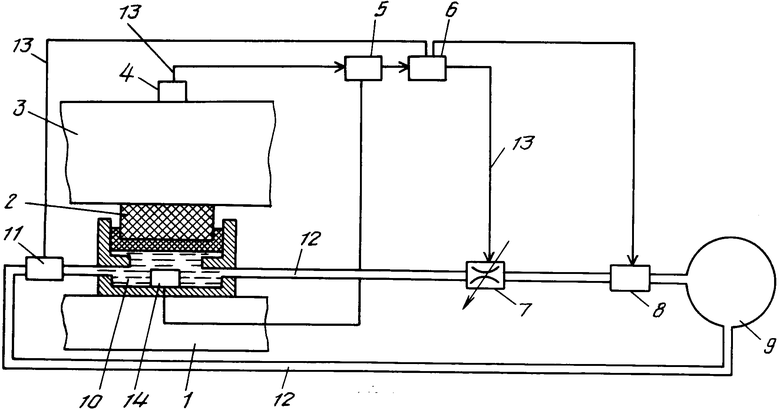
На чертеже изображена принципиальная схема устройства, реализующего предложенный способ.
Устройство содержит опорное основание 1, упругий элемент 2 регулируемой жесткости, защищаемый объект 3, датчик 4 частоты, счетно-решающий прибор 5, усилитель-преобразователь 6, регулятор 7 расхода жидкости, гидравлический насос 8, бачок 9, гидравлическую камеру 10, сливной клапан 11, гидравлические магистрали 12, элекрические связи 13, датчик 24 давления.
Предлагаемый способ реализуется с помощью устройства следующим образом.
Предварительно устанавливается требуемая номинальная жесткость упругого элемента 2 за счет его поджатия давлением жидкости, подаваемой в камеру 10 из бачка 9 с помощью насоса 8, магистралей 12 и регулятора 7 расхода. Управляемый сливной клапан 11 удерживает давление жидкости в камере 10. Жесткость упругого элемента 2, а значит, и частота собственных колебаний ωо защищаемого объекта 3 пропорциональны степени поджатия упругого элемента 2, а значит, и величине давления жидкости в камере 10. Величина давления жидкости в камере 10 измеряется датчиком 14 давления и с его помощью передается в счетно-решающий прибор 5, который по величине давления определяет соответствующее значение частоты собственных колебаний ωо защищаемого объекта 3. Вынужденные колебания защищаемого объекта измеряются датчиком 4 частоты. Измеренное значение частоты вынужденных колебаний ωв передается в счетно-решающий прибор 5, в котором вырабатывается сигнал, обратно пропорциональный по величине разности квадратов частот вынужденных и собственных колебаний защищаемого объекта 3. т. е. f = A/ ωв2 - ω о2, где А - коэффициент пропорциональности, в котором осуществляется логический анализ величины сигнала f. Если он меньше некоторого порогового значения, f <fпор, то никаких управляющих команд из счетно-решающего прибора не подается, если больше, f>fпор, то сигнал поступает на усилитель-преобразователь 6. Из усилителя-преобразователя в зависимости от знака входного сигнала f управляющий сигнал подается либо на сливной клапан 11, либо на включение насоса 8 и регулятора 7 расхода жидкости. Если сигнал f положительный, то подается команда на сливной клапан 11 с целью уменьшения давления в камере 10, уменьшения поджатия упругого элемента 2 и в результате уменьшения частоты собственных колебаний ω о объекта 3 до выполнения условия f<fпор если сигнал отрицательный, то подается команда на включение насоса 8 и регулирование расхода жидкости регулятором 7 с целью увеличения давления в камере 10, увеличения поджатия упругого элемента 2 и в результате увеличения частоты собственных колебаний ωо объекта 3 до выполнения условия f<fпор.
Таким образом, предлагаемый способ управления жесткостью позволяет амортизатору автоматически с высокой надежностью отстраиваться от резонансных режимов колебаний защищаемого объекта в широком диапазоне частот за счет своевременного и достаточного по величине изменения частоты собственных колебаний защищаемого объекта 3 на амортизаторе.
(56) 1. Авторское свидетельство СССР N 1223213, кл. G 05 D 19/02, 1986.
2. Авторское свидетельство СССР N 1072012, кл. G 05 D 19/00, 1984.
3. Авторское свидетельство СССР N 1578387, кл. F 16 F 9/02, 1990.
4. Авторское свидетельство СССР N 1167591, кл. G 05 D 19/00, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЖЕСТКОСТЬЮ РЕГУЛИРУЕМОГО ВИБРОИЗОЛЯТОРА | 1992 |
|
RU2044341C1 |
| СПОСОБ ИЗМЕНЕНИЯ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА ОБОЛОЧЕННОЙ КОНСТРУКЦИИ | 1992 |
|
RU2039894C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2015935C1 |
| СПОСОБ ИЗМЕНЕНИЯ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА ДЛИННОМЕРНОЙ КОНСТРУКЦИИ | 1992 |
|
RU2039893C1 |
| АМОРТИЗАТОР | 2000 |
|
RU2179665C1 |
| АМОРТИЗАТОР | 2001 |
|
RU2204745C1 |
| Автоматическая система управления жесткостью упругого элемента гасителя колебаний | 1984 |
|
SU1200258A2 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ | 1991 |
|
RU2067703C1 |
| АМОРТИЗАТОР | 2001 |
|
RU2210687C1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
Изобретение может быть использовано для предотвращения резонансных режимов колебаний в различных областях техники, в частности в транспортном машиностроении. Сущность изобретения заключается в том, что измеряют частоту вынужденных колебаний защищаемого объекта и вырабатывают сигнал, обратно пропорциональный по величине разности квадратов частоты вынужденных колебаний и частоты собственных колебаний защищаемого объекта, пропорционально этому сигналу, начиная с некоторого порогового значения, изменяют жесткость упругого элемента амортизатора: если частота вынужденных колебаний возрастает, то жесткость уменьшают, и наоборот, надежно предотвращая таким образом резонансные режимы колебаний защищаемого объекта в широком диапазоне частот. 1 ил.
СПОСОБ УПРАВЛЕНИЯ ЖЕСТКОСТЬЮ РЕГУЛИРУЕМОГО АМОРТИЗАТОРА, включающий измерение частоты вынужденных колебаний защищаемого объекта, отличающийся тем, что определяют частоту собственных колебаний защищаемого объекта и формируют сигнал, обратно пропорциональный по величине разности квадратов вынужденной и собственной частот колебаний защищаемого объекта, а жесткость амортизатора изменяют пропорционально этому сигналу, начиная с выбранного порогового его значения.
