Изобретение относится к средствам и способам виброзащиты объектов в различных областях техники, в частности в транспортном машиностроении.
Известен способ гашения колебаний, заключающийся в измерении параметров колебаний объекта, получении сигнала рассогласования путем сравнения измеренных параметров с параметрами эталонного управляющего воздействия и подачи сигнала рассогласования на исполнительный орган управления, задержания сигнала рассогласования на время задержки τ, которое выбирают в зависимости от частоты колебаний ωо из соотношения 1,8 < ωоτ< 3,2 [1]
Наиболее близким к изобретению является способ управления жесткостью, примененный в виброизоляторе с регулируемой жесткостью [2] заключается в измерении деформации упругого элемента, получении сигнала рассогласования, пропорционального двум составляющим: ζо постоянной или медленно меняющейся и ζp соответствующей рабочим частотам, 1-
1-  где С0 среднее значение жесткости упругого элемента;
где С0 среднее значение жесткости упругого элемента;
g коэффициент усиления, и подаче сигнала управления на исполнительный орган.
Недостатком данного способа управления жесткостью и реализующего его устройства является то, что он не позволяет полностью исключить колебания виброзащищаемого объекта. В лучшем случае они равны колебаниям опорного основания.
Цель изобретения повышение эффективности виброизоляции.
Поставленная цель достигается тем, что в способе управления жесткостью регулируемого виброизолятора, заключающемся в том, что измеряют смещение объекта относительно основания, фиксируют сигнал рассогласования пропорциональный постоянной εо и переменной εр, составляющим на рабочих частотах и формируют управляющий сигнал в виде
C C 1-
1-  сигнал рассогласования фиксируют непосредственно по величине смещения объекта, преобразовывают указанное соотношение в выражение
сигнал рассогласования фиксируют непосредственно по величине смещения объекта, преобразовывают указанное соотношение в выражение
C C 1+
1+  и по нему корректируют управляющий сигнал для регулируемого виброизолятора, где С уровень управляющего сигнала;
и по нему корректируют управляющий сигнал для регулируемого виброизолятора, где С уровень управляющего сигнала;
С0 среднее значение жесткости упругого элемента;
х0 статическая деформация упругого элемента;
Δ х смещение объекта относительно основании при колебаниях;
g коэффициент усиления сигнала.
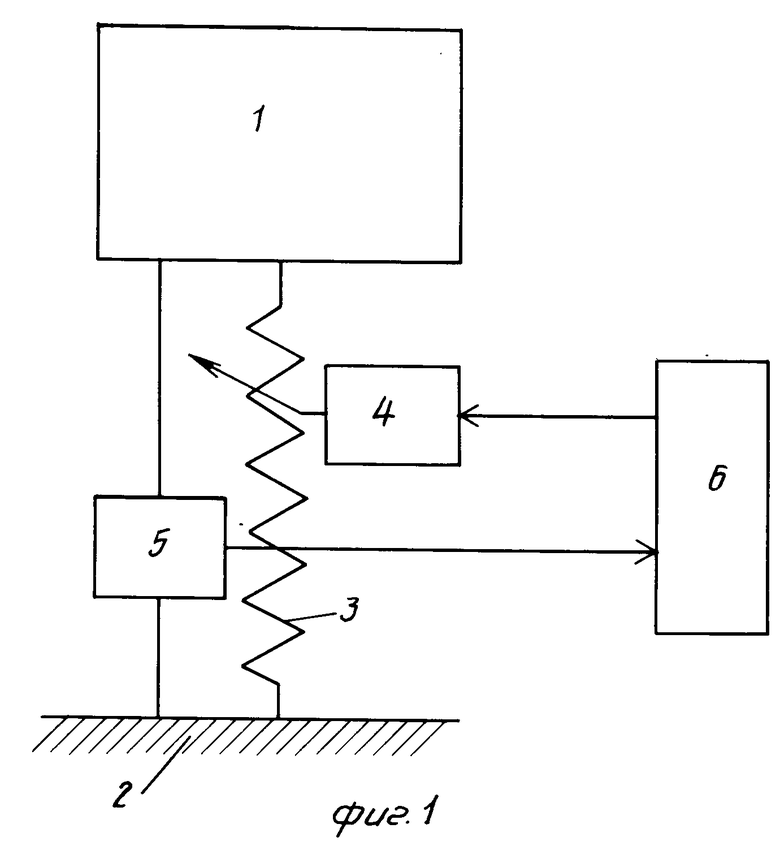
Предлагаемый способ реализуется с помощью устройства, показанного на фиг. 1.
Между объектом 1 и основанием 2 размещен упругий элемент 3, регулирование жесткости которого осуществляется исполнительным органом 4 и датчиком 5 относительных смещений объекта и основания. Управление исполнительным органом 4 осуществляется блоком 6 управления, вход которого подключен к выходу датчика 5.
В блоке управления 6 осуществляется преобразование сигнала, пропорционального относительному смещению Δ х объекта и основания, в сигнал, пропорциональный ве- личине Z gC 1+
1+  где g коэффи- циент усиления.
где g коэффи- циент усиления.
Устройство работает следующим образом.
При смещении объекта относительно основания датчик вырабатывает сигнал, прямо пропорциональный величине этого смещения. Данный сигнал поступает на вход блока 6 управления, который на его основе формирует сигнал, пропорциональ- ный Z gC 1+
1+  Выходной сигнал блока управления поступает в исполнительный орган 4, который осуществляет изменение жесткости упругого элемента 3 по закону C z/g C
Выходной сигнал блока управления поступает в исполнительный орган 4, который осуществляет изменение жесткости упругого элемента 3 по закону C z/g C 1+
1+ 
Реализуемый закон изменения жесткости упругого элемента позволяет поддерживать постоянной реакцию связи между объектом и основанием при любых их перемещениях относительно друг друга и благодаря этому теоретически полностью исключить колебания, обусловленные колебаниями основания, т.е. стабилизировать положение объекта.
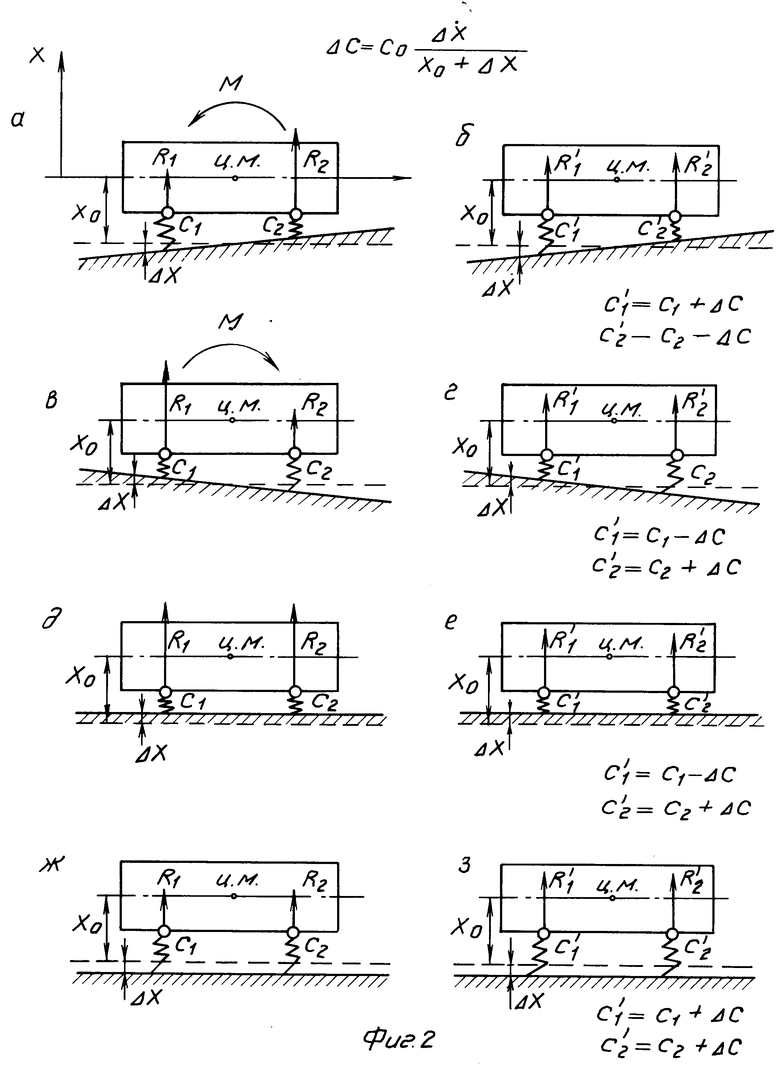
Механизм вибростабилизации объекта показан на фиг. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЖЕСТКОСТЬЮ РЕГУЛИРУЕМОГО АМОРТИЗАТОРА | 1991 |
|
RU2006901C1 |
| СПОСОБ ИЗМЕНЕНИЯ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА ОБОЛОЧЕННОЙ КОНСТРУКЦИИ | 1992 |
|
RU2039894C1 |
| ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ | 1991 |
|
RU2067703C1 |
| СПОСОБ ИЗМЕНЕНИЯ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА ДЛИННОМЕРНОЙ КОНСТРУКЦИИ | 1992 |
|
RU2039893C1 |
| ВИБРОДВИГАТЕЛЬ | 1992 |
|
RU2037073C1 |
| Виброизолятор с регулируемой жесткостью | 1984 |
|
SU1223213A1 |
| СПОСОБ ПОВЫШЕНИЯ СОХРАННОСТИ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ - ВЯЗКОУПРУГИХ И ТОНКОСТЕННЫХ ОБОЛОЧЕК - ПРИ ДЛИТЕЛЬНОЙ ТРАНСПОРТИРОВКЕ | 1991 |
|
RU2040412C1 |
| СПОСОБ ПОВЫШЕНИЯ СОХРАННОСТИ ТОНКОСТЕННЫХ ОБОЛОЧЕЧНЫХ КОНСТРУКЦИЙ ПРИ ДЛИТЕЛЬНОМ ХРАНЕНИИ | 1991 |
|
RU2017637C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2015935C1 |
| Установка для демонстрации колебаний транспортного средства | 1990 |
|
SU1755315A2 |
Изобретение относится к средствам гашения колебаний и может быть использовано при оптимизации управления виброизолятором. Эта оптимизация осуществляется измерением смещения объекта при колебаниях на рабочих частотах и формированием сигнала воздействия на орган управления виброизолятора с учетом математически выявленных соотношений между уровнем управляющего сигнала и параметрами объекта. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ЖЕСТКОСТЬЮ РЕГУЛИРУЕМОГО ВИБРОИЗОЛЯТОРА, заключающийся в том, что измеряют смещение объекта относительно основания, фиксируют сигнал рассогласования, пропорциональный постоянной εo и переменной εp составляющим на рабочих частотах, и формируют управляющий сигнал в виде
отличающийся тем, что сигнал рассогласования фиксируют непосредственно по величине смещения объекта, преобразовывают указанное соотношение в выражение
где C уровень управляющего сигнала;
C0 среднее значение жесткости упругого элемента;
X0 статическая деформация упругого элемента;
X смещение объекта относительно основания при колебаниях;
g коэффициент усиления сигнала, и по нему корректируют управляющий сигнал для регулируемого виброизолятора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Виброизолятор с регулируемой жесткостью | 1984 |
|
SU1223213A1 |
