Изобретение относится к системам предупреждения столкновений подвижных объектов (судов) и может быть использовано для управления движением объектов морского, речного и воздушного флота.
Целью изобретения является расширение функциональных возможностей, а именно уменьшение времени обмена дополнительными данными о параметрах движения встречного (попутного) судна: курсе, скорости и виде выполняемого маневра для уменьшения числа аварийных ситуаций.
На фиг. 1 приведена структурная схема предлагаемой системы; на фиг. 2 - диаграммы, поясняющие ее работу; на фиг. 3 - структурная схема блока обработки.
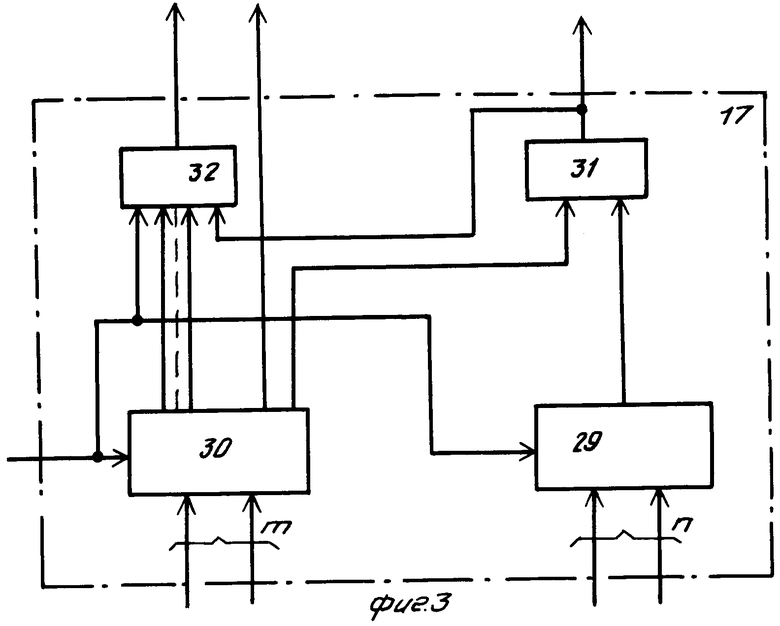
Система для управления движением судов содержит два разнесенных в пространстве и соединенных между собой через радиоканал приемопередающих комплекта 1, в каждый из которых входят приемопередающая антенна 2, антенный переключатель 3, приемник 4, телефонный аппарат 5, передатчик 6, первый и второй генераторы импульсов 7 и 8, индикатор 9, элемент И 10, блок управления 11, пороговое устройство 12, первый, второй и третий генераторы прямоугольных импульсов 13, 14 и 15, сумматор 16, блок обработки информации 17, счетчик 18, преобразователь кода в код 19, первая и вторая группы триггеров 20 и 21, группа элементов ИЛИ 22, первый, второй и третий элементы ИЛИ 23, 24 и 25, первый и второй регистр 26 и 27, элемент задержки 28. Блок обработки информации 17 состоит из первого и второго дешифраторов 29 и 30, элементов И 31 и И-НЕ 32.
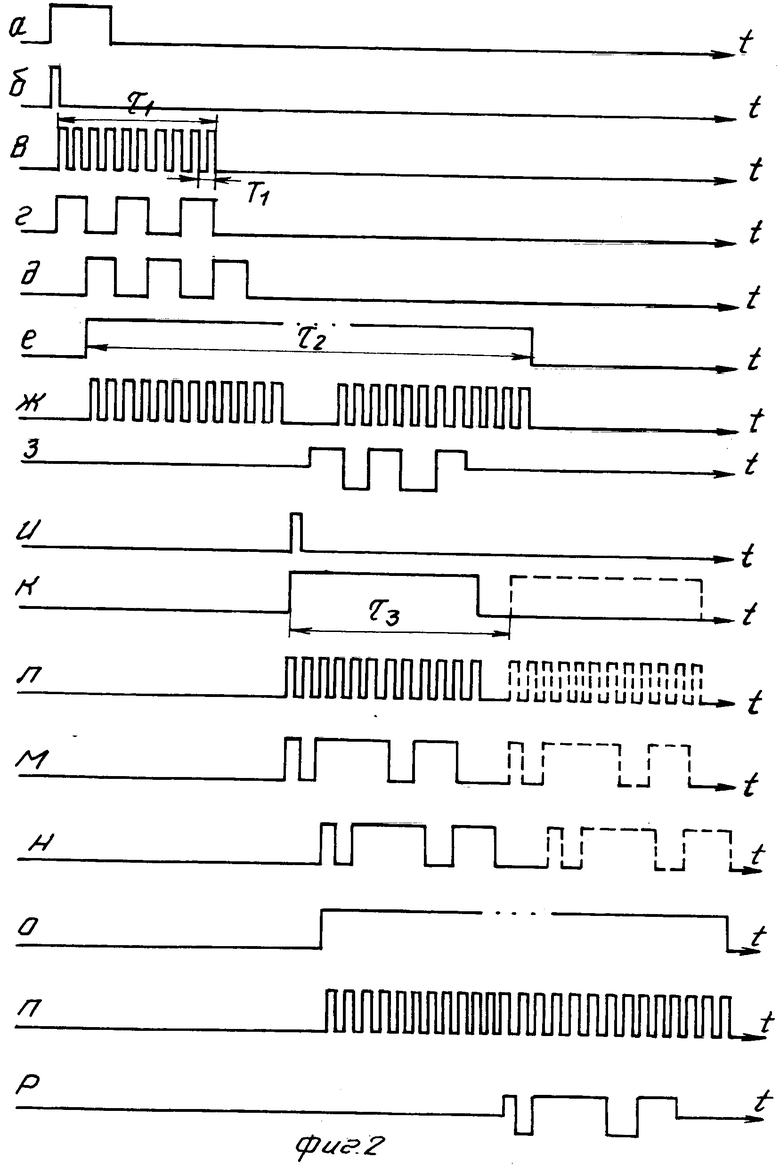
На фиг. 2 приняты следующие обозначения:
а - импульс на выходе второго элемента ИЛИ 24 вызывающего абонента (комплекта);
б - импульс на выходе второго генератора прямоугольных импульсов 14 вызывающего комплекта 1;
в - сигналы на выходе второго генератора импульсов 8 вызывающего комплекта;
г - сигнал на выходе первого регистра 26 вызывающего комплекта,
д - принятый сигнал на выходе порогового устройства 12 вызываемого объекта;
е - импульс на выходе первого генератора прямоугольных импульсов 13 вызываемого объекта;
ж - сигнал на выходе первого генератора импульсов 7 вызываемого объекта;
з - сообщение на выходе преобразователя кода в код 19 вызываемого объекта;
и - сигнал на третьем выходе блока обработки информации 17 вызываемого объекта;
к - импульс на выходе второго генератора прямоугольных импульсов 14 вызываемого комплекта;
л - сигналы на выходе второго генератора импульсов 8 вызываемого комплекта 1;
м - сигнал на выходе первого регистра 26 вызываемого комплекта;
н - сигнал на выходе порогового устройства 12 вызывающего комплекта;
о - сигнал на выходе первого генератора прямоугольных импульсов 13 вызывающего комплекта;
п - импульс на выходе первого генератора импульсов 7 вызывающего комплекта;
р - сигналы на выходе преобразователя кода в код 19 вызываемого комплекта.
На фиг. 2к, л, м, н пунктиром показано положение аналогичных сигналов при появлении импульса на втором выходе обработки блока информации 17.
Предложенная система работает в двух режимах: "Вызов общий" и "Вызов по номеру" и служит для организации обмена данными между абонентами, имеющими на борту приемопередающие комплекты 1, работающие на одной несущей частоте.
Первый режим работы. Перед началом работы осуществляется установка в нуль всех узлов системы (формирователь сигналов начальной установки, например, при включении аппаратуры на фиг. 1 не показан). Затем производится включение режима на блоке управления 11 "Вызов общий". При этом импульс с первого выхода блока управления 11, пройдя второй элемент ИЛИ 24, запускает второй ГПИ 14, спадом которого устанавливаются в исходное состояние вторая группа n триггеров 21 и через третий элемент ИЛИ 25 - первая группа n триггеров 20. Учитывая, что в первый регистр 26 информация не была введена, на выходе комплекта 1 радиосигналы будут отсутствовать. Остальные процессы, происходящие в системе, подробно будут рассмотрены ниже. При работе с блока управления 11 вводятся по m параллельным шинам в первый регистр 26 данные о характеристиках судна и параметрах его движения, например курс, скорость, местоположение, вид выполняемого маневра и т. п. По n параллельным шинам с блока управления 11 вводятся данные, необходимые для организации дуплексного обмена сообщениями, например классификационные (бортовые) номера вызывающего и вызываемого абонентов (судна или другого объекта), тип сообщения, определяющий режим работы ведущего и ведомого комплектов 1. Все эти данные необходимы встречному (попутному) судну для выполнения расхождения без создания аварийной обстановки. После ввода данных с блока 11 все суда и другие объекты с приемопередающими комплектами 1, находящимися в зоне управления, на которых проведена данная операция, готовы к передаче, приему и обработке данных.
Пусть с первого выхода блока управления ведущего (вызывающего) комплекта 1 поступает команда "Вызов общий" (см. фиг. 2, а). Этот сигнал, пройдя второй элемент ИЛИ 24, запускает третий ГПИ 15, выходной импульс (см. фиг. 2, б) которого поступает на вход второго генератора импульсов 8 и вход параллельного разрешения первого регистра 26, Генератор 8 вырабатывает пачку импульсов (см. фиг. 2, в), которые поступают на тактовый вход первого регистра 26. Длительность посылки τ1 и период повторения Т1 импульсов генератора 8 зависит от числа разрядов передаваемого сообщения и определяется шириной полосы частот радиоканала. Например, пусть число разрядов в сообщении 96, а полоса частот радиоканала 3 кГц. Тогда τ1 и Т1 можно выбрать из условия 2 τ1= Т1 > 334 мкс, а τ2> 32,4 мс.
При поступлении на вход параллельного разрешения регистра 26 напряжения высокого уровня (см. фиг. 2, б) осуществляется ввод в регистр данных, записанных в n триггерах 21 второй группы (через n элементов ИЛИ 22), и информации, поступающей с m выходов блока управления 11 на m входов регистра 26. После записи информации изменяется уровень на входе параллельного разрешения регистра 26 (см. фиг. 2, б) и начинают формироваться тактовые импульсы генератора 8 (см. фиг. 2, в). Этими импульсами, например отрицательными перепадами напряжения, осуществляется синхронный сдвиг вправо регистра 26. Выходные импульсы регистра 26 (см. фиг. 2, г) через сумматор 16 поступают на вход передатчика 6 и на вход первого элемента ИЛИ 23. С выхода элемента ИЛИ 23 кодовая группа (см. фиг. 2, г) преобразователя кода в код 19 преобразуется к виду, удобному для воспроизведения на экране индикатора 9, например из уровней ТТЛ амплитуда сигналов преобразуется в уровни, определяемые стыком С3 (единица - более +3 В, нуль - менее -3 В). Переданные данные отображаются на экране индикатора 9 для обеспечения визуального контроля штурманом. С выхода передатчика 6 радиосигналы, пройдя антенный переключатель 3 и антенну 2, излучаются в пространство.
На ведомых комплектах, находящихся в пределах радиуса действия радиолиниии связи, производится прием радиосигналов по цепи антенна 2, антенный переключатель 3, приемник 4. Видеосигналы (см. фиг. 2, д) с выхода приемника 4 поступают на пороговое устройство 12 и на вход телефонного аппарата 5, на выходе динамика которого на время приема сигнала (см. фиг. 2, д) будут прослушиваться "щелчки". В пороговом устройстве 12 полезные сигналы выделяются на фоне помех. Уровень порога в устройстве 12 устанавливается в блоке управления 11 (второй выход), например, с помощью переменного делителя величина напряжения выбирается таким образом, чтобы при начальной установке проходили наиболее мощные сигналы, характерные для близко расположенных судов. Уровень порога может быть уменьшен для увеличения дальности действия радиолинии связи.
Импульсами с выхода порогового устройства 12 запускается первый ГПИ 13, длительность выходного сигнала которого определяется временем записи и считывания принимаемых данных от всех групп судов во втором регистре 27 (см. фиг. 2, е) - τ2. Например, все суда разбиты на М групп так, чтобы вероятность появления нескольких судов одной группы в заданном районе была минимальной. Тогда длительность импульса ГПИ 13 определяется из выражения τ2= Т1 ˙М ˙N, где N - число разрядов в передаваемом сообщении. Кроме того, импульсы с выхода порогового устройства (см. фиг. 2, д) поступают на последовательный вход второго регистра 27. Информация в последовательном виде записывается в регистр 27. При выдаче генератором 7 импульсов, по количеству совпадающих с N-числом разрядов передаваемого сообщения, во всех ячейках регистра 27 оказываются записаны входные данные. Из пачки импульсов (см. фиг. 2, ж) в счетчике 18 выделяется N-й импульс, который дает разрешение на обработку сигналов с выходов m разрядов регистра 27 в блоке обработки информации 17, поступая на его первый вход, и подается через третий элемент ИЛИ 25 для установки в нулевое состояние первой группы из n триггеров 20, например, фронтом импульса.
Установка в нуль счетчика 18 осуществляется фронтом выходного импульса первого ГПИ 13 (см. фиг. 2, е). В момент спада импульса с выхода третьего элемента ИЛИ 25, длительность которого меньше половины длительности периода повторения импульсов генератора 7 (1/2 T1), в триггер 20 вводится информация, записанная в данный момент времени в m разрядах регистра 27. Эта информация может быть стерта при определении недостоверности данных в блоке обработки информации 17. В этом случае на первом выходе блока 17 вырабатывается сигнал, задержанный относительно фронта выходного сигнала счетчика 18, который устанавливается в нулевое состояние фронтом импульса ГПИ 13. Сигнал с первого выхода блока 17 через элемент ИЛИ 25 стирает записанную в триггерах 20 информацию. Этим же сигналом через второй элемент ИЛИ 24 запускается генератор прямоугольных импульсов 15, который при необходимости автоматически вырабатывает сигнал ответа о недостоверной информации вызывающему абоненту.
Сигнал с первого выхода блока 17 запускает третий ГПИ 15, выходной импульс которого запрещает на время, равное τ1-времени прохождения через элемент И 10 и последовательно соединенные первый элемент ИЛИ 23, преобразователь кода в код 19, сообщений для отображения их на индикаторе 9. Достоверная информация, пройдя элементы 10 и 23, преобразуется в преобразователе 19 (см. фиг. 2, з), например, по амплитуде из уровней ТТЛ в уровни, соответствующие стыку С3 по ГОСТ 18146-72. Данные на экране индикатора 9 отображаются, например, в буквенно-цифровом виде, удобном для восприятия штурманом. Для определения достоверности данных в блоке 17 обрабатываются сигналы с выходов m разрядов второго регистра 27, например, содержащие контрольную информацию, тип сообщения и т. п. При достоверной информации в случае определения признака в принятом сообщении "Вызов общий", например, по типу сообщения, введенного с блока управления 11 ведущего комплекта, сигнал со второго выхода блока 17 (см. фиг. 2, и) через элемент задержки 28, второй элемент ИЛИ 24, третий ГПИ 15 (см. фиг. 2, л, пунктир) и данные с регистра 26 (см. фиг. 2, м, пунктир), как описано выше, преобразуются в радиосигналы и излучаются в пространство. В этом случае данные в регистр 26 могут быть занесены с выходов первой 20 или второй 21 группы из n триггеров. Данные, например, о курсе, скорости, виде выполняемого маневра записываются в соответствующие разряды первого регистра 26.
Время задержки сигнала в элементе 28 зависит от номера группы, к которой причислено данное судно. Обычно в группы объединяются суда, вероятность прохождения которых в одном районе одновременно мала. Например, для речного флота могут быть объединены суда из разных пароходств бассейна. На ведущем судне принятые радиосигналы преобразуются в видеосигналы (см. фиг. 2, н, пунктир) и проходят все операции, как и в случае приема данных на ведомом судне (см. фиг. 2, о, п, р). Отличие состоит лишь в том, что ответ предназначается тому судну (например, по номеру судна или местоположению, полученному из принятого сообщения), в котором была осуществлена команда "Вызов общий". После оценки достоверности сообщения оно выводится на экран индикатора 9, в противном случае, как описано выше, производится автоматически повторение команды "Вызов общий" и блокирование импульсом ГПИ 14 вывода искаженных данных на экран индикатора. При выдаче сигнала "Вызов общий" все суда, находящиеся в зоне устойчивого приема, посылают ответные сигналы, задержанные относительно начала вызывной последовательности. Время задержки в элементе 28 определяется в зависимости от номера группы, в которую распределено судно. Наблюдая характер отображаемой на экране индикатора 9 принятой информации, штурман на время, равное длительности импульса ГПИ 13, не производится вызов данных с других судов.
В режиме "Вызов по номеру" заявляемая система работает в том случае, когда известен бортовой (классификационный) номер ведомого судна, например, в итоге анализа результатов, полученных при нажатии команды "Вызов общий" и сопровождении штурманом судов, при получении данных о судах с береговых (наземных) информационных пунктов и т. п. Номер ведомого судна, тип сообщения, синхропосылка, например старт-стопный сигнал и другие данные, вводятся в регистр 26 с блока управления 11 через вторую группу n триггеров 21 и n элементов ИЛИ 22, обpатываются в ведущем комплекте (фиг. 2б, в, г) и передаются на ведомый комплект 1, где обрабатываются с помощью описанных устройств.
При приеме достоверной информации данные с n разрядов второго регистра 27 переписываются во время выходного импульса счетчика 18 в первую группу n триггеров 20. При записи параллельной информации в регистр 26 данные с триггеров 20 через n элементов ИЛИ 22, а также данные о текущих параметрах движения судна, виде выполняемого маневра и т. п. , снимаемые с m выходов блока управления 11, вписываются в соответствующие разряды регистра 26. Далее, пройдя узлы 16, 6, 3 и 2, информация в форме радиоимпульсов излучается в пространство. В ведущем комплекте 1 радиосигналы, пройдя антенну 2, антенный переключатель 3, детектируются в приемнике 4 и через пороговое устройство 12 подаются на вход первого ГПИ 13 и последовательный вход второго регистра 27. После выполнения в регистре 27 операций, аналогичных описанным, в случае достоверной информации и определения вида принимаемого сигнала, например, по типу сообщения как ответа вызываемого судна по заданному номеру сигнал на третьем выходе блока 17 будет отсутствовать, а данные через узлы 10, 23 и 19 проходят на индикатор 9 для отображения, а в случае приема данных с ошибкой импульс с первого выхода блока обработки информации 17 запускает второй ГПИ 14 и "Вызов по номеру" повторяется до получения ответа или прекращения штурманом данного режима работы, например, начальной установкой в нуль всей аппаратуры. Сумматор 16 позволяет соединить одновременно вход передатчика 6 с выходом регистра 26 и телефонным аппаратом 5.
Блок обработки информации 17 состоит из двух дешифраторов 29 и 30 (номера и типа сообщения соответственно) и схемы логической обработки информации, содержащей элементы И 31 и И-НЕ 32. Данные на вход первой группы входов блока 17 поступают на дешифратор 29 номера с m параллельных разрядов второго регистра 27, а на информационные входы второго дешифратора 30 - с m параллельных разрядов того же регистра 27. Оценка сообщения дешифраторами осуществляется в момент поступления импульса разрешения со счетчика 18. В этом случае на выходе дешифратора 30 могут быть три сигнала. Первый характеризует режим "Вызов общий", второй - "Вызов по номеру", третий - признак недостоверности информации. Для целевого выбора предназначенного судну сообщения обеспечивается сборка по И (узел 31) сигналов дешифратора по номеру 29 и соответствующего выходного сигнала дешифратора 30. При наличии этих двух сигналов на выходе блока 17 вырабатывается импульс, запускающий приемопередающий комплект 1 для формирования ответа ведущему объекту. Выходной сигнал элемента И 31 поступает на вход элемента И-НЕ 32, а также на вход элемента ИЛИ 24. В режиме "Вызов общий" сигнал с другого выхода дешифратора 30 через элемент 28 задержки запускает процесс формирования ответного сообщения. Учитывая, что рабочих режимов больше нет, все сигналы, появляющиеся на остальных инверсных выходах дешифратора 30, являются ложными. Оценку достоверности можно производить с помощью элемента И-НЕ 32. Наличие хотя бы одного нуля на входах элемента И-НЕ 32 в момент выходного импульса счетчика 18 выдает признак недостоверности принятых данных и тогда информация, записанная в группе триггеров 20 стирается.
Среднее время сеанса радиотелефонной связи для обмена данными между штурманами обычно составляет 50 с. Если для обмена данными использовано сообщение, состоящее из 96 разрядов (N = 96), n = 27 (212 - абонентов системы управления, т. е. 12 разрядов отводится как под номер ведущего, так и под номер ведомого комплекта 1, в трех разрядах записывается тип сообщения); m = 53 - число разрядов, отводимых для передачи данных о параметрах движения, местоположении и виде выполняемого маневра; синхропосылки и контрольные сигналы занимают 18 разрядов, а для повышения достоверности при скорости передачи 1200 бит/с используется мажоритарное декодирование, например, по критерию 2 из 3 при известном номере судна потребуется менее 1 с.
В режиме "Вызов общий" при распределении судов на 4 группы для указанных параметров для получения данных на индикаторе ведущего судна потребуется менее 3,3 с. При выборе других методов кодирования, имеющих меньшую по сравнению с рассмотренным избыточность, время получения необходимой информации от встречного (попутного) судна на экране может быть уменьшено. Эти сравнительные данные позволяют сделать вывод о выигрыше (более чем на порядок) времени получения данных о встречном или попутном судне по сравнению с прототипом. Следовательно, оставшуюся часть (резерв) времени штурман может использовать для выбора более точного маневра, не приводящего к аварии. Телефонный аппарат может быть использован для организации обмена речевыми сообщениями. В процессе обмена цифровыми данными на время передачи и приема в динамике телефонного аппарата будут прослушиваться "щелчки".
Система управления дает также выигрыш по сравнению со средствами автоматизированной радиолокационной прокладки курса судов, в которых вид маневра встречного (попутного) морского судна определяется спустя 1-3 мин после начала его сопровождения, а также позволяет осуществить основные функции вторичного локатора: определить местоположение состав и параметры движения объектов, находящихся в зоне устойчивого радиоприема. (56) Патент США N 3320610, НКИ 343-6, опублик. 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 1986 |
|
SU1840556A2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА ПЕРЕДАЧИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 1984 |
|
SU1840489A1 |
| СВЕТОВОДНАЯ СИСТЕМА ПЕРЕДАЧИ АНАЛОГОВОЙ ИНФОРМАЦИИ | 1986 |
|
RU2030834C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ | 1985 |
|
RU2040802C1 |
| ПРИЕМОПЕРЕДАТЧИК ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 1989 |
|
RU2221342C2 |
| ЦИФРОВОЙ ПЕРИОДОМЕР | 1991 |
|
RU2011997C1 |
| ЦИФРОВОЙ СТРОБОСКОПИЧЕСКИЙ ОСЦИЛЛОГРАФ | 1992 |
|
RU2010239C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО СОЕДИНЕНИЯ ДЛЯ ВЕДЕНИЯ СЕКРЕТНЫХ ТЕЛЕФОННЫХ ПЕРЕГОВОРОВ | 1999 |
|
RU2191481C2 |
Изобретение относится к системам предупреждения столкновений подвижных объектов (судов) и может быть использовано для управления движением объектов морского, речного и воздушного флота. Целью изобретения является расширение функциональной надежности за счет уменьшения времени обмена дополнительными данными о параметрах движения встречного (попутного) судна: курсу, скорости и виде выполняемого маневра, что приводит к уменьшению аварийных ситуаций. Система содержит два разнесенных в пространстве и соединенных между собой через радиоканал приемопередающих комплекта 1, в каждый из которых входят приемопередающая антенна 2, антенный переключатель 3, приемник 4, телефонный аппарат 5, передатчик 6, два генератора 7, 8 импульсов, индикатор 9, элемент И 10, блок 11 управления, пороговое устройство 12, генераторы 13 15 прямоугольных импульсов, сумматор 16, блок 17 обработки информации, счетчик 18, преобразователь 19 кода в код, группы триггеров 20, 21, группа элементов ИЛИ 22, элементы ИЛИ 23 25, регистры 26, 27, элемент 28 задержки. В системе вид маневра встречного (попутного) морского судна определяется спустя 1 - 3 мин после начала его сопровождения. Кроме того, система осуществляет основные функции вторичного локатора: определяет местоположение, состав и параметры движения объектов, находящихся в зоне устойчивого радиоприема. 3 ил.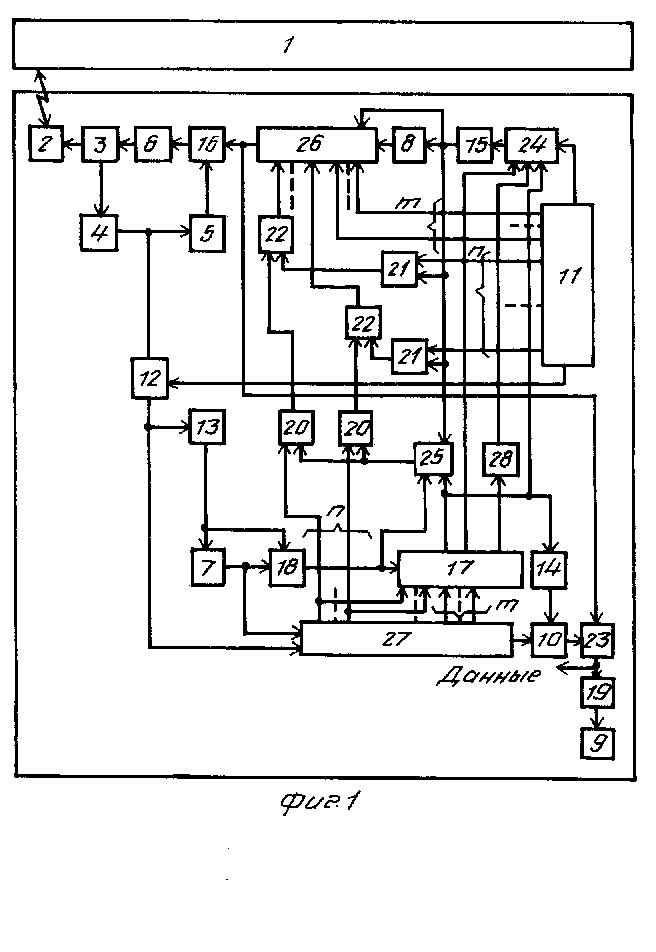
СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ, содержащая два разнесенных в пространстве и соединенных между собой через радиоканал приемопередающих комплекта, каждый из которых содержит приемопередающую антенну, соединенную через антенный переключатель с передатчиком и приемником, выход приемника подключен к телефонному аппарату, два генератора импульсов, индикатор, элемент И, пороговое устройство, выход которого соединен с входом первого генератора прямоугольных импульсов, блок управления, отличающееся тем, что в систему введены первый и второй регистры, блок обработки информации, счетчик, преобразователь кода в код, две группы триггеров, группа элементов ИЛИ, сумматор, три элемента ИЛИ, два генератора прямоугольных импульсов, элемент задержки, выход приемника подключен к первому входу порогового устройства, выход которого подключен к входу последовательного кода второго регистра, выход которого подключен к первому входу элемента И, выход которого подключен к первому входу первого элемента ИЛИ, выход которого является информационным выходом системы и подключен к входу преобразователя кода в код, выход которого подключен к входу индикатора, выход первого генератора прямоугольных импульсов подключен к входу обнуления счетчика и через первый генератор импульсов к счетному входу счетчика и к тактовому входу второго регистра, первая группа выходов которого подключена к первой группе входов блока обработки информации и к соответствующим входам установки в единичное состояние триггеров первой группы, выход каждого из которых подключен к первому входу соответствующего элемента ИЛИ группы, выходы элементов ИЛИ группы подключены к первой группе информационных входов первого регистра, выход которого подключен к первому входу сумматора и второму входу первого элемента ИЛИ, телефонный аппарат подключен к второму входу сумматора, вторая группа выходов второго регистра подключена к второй группе входов блока обработки информации, первый выход которого подключен к первым входам второго и третьего элементов ИЛИ и через второй генератор прямоугольных импульсов к второму входу элемента И, выход счетчика подключен к входу блока обработки информации и второму входу третьего элемента ИЛИ, выход которого подключен к входам установки в нулевое состояние триггеров первой группы, второй и третий выходы блока обработки информации подключены соответственно к входу элемента задержки и к второму входу второго элемента ИЛИ, выход которого подключен к входу третьего генератора прямоугольных импульсов, выход которого подключен к входу второго генератора импульсов, к входу разрешения первого регистра, к входам установки в нулевое состояние триггеров второй группы и к третьему входу третьего элемента ИЛИ, первый и второй выходы блока управления подключены соответственно к третьему входу второго элемента ИЛИ и к второму входу порогового устройства, выход элемента задержки подключен к четвертому входу второго элемента ИЛИ, первая группа выходов блока управления подключена к второй группе информационных входов первого регистра, каждый выход второй группы блока управления подключен к соответствующему входу установки в единичное состояние триггеров второй группы, выход каждого из которых подключен к второму входу соответствующего элемента ИЛИ группы, выход сумматора подключен к входу передатчика.
