Изобретение относится к радиолокационной технике и может быть использовано в помехозащищенных устройствах для улучшения обнаружения радиолокационных сигналов в условиях воздействия пассивных помех.
Известны межобзорные устройства картографирования пассивных помех, предназначенные для выделения пространственных областей, пораженных помехой, и выбора соответствующего режима работы системы селекции движущихся целей, использующие скоростные или энергетические различия между сигналами помех и целей и содержащие обнаружитель сигналов целей и помех на фоне собственных шумов приемника и устройство межобзорного сравнения, формирующее сигналы картографирования при наличии неподвижных или медленно движущихся объектов.
Сигналы помех и целей с выхода обнаружения записываются в соответствующие ячейки запоминающего устройства (ЗУ), если они обнаруживаются в двух соседних обзорах в одних и тех же элементах пространства.
Недостатком такого устройства является некачественное выделение помехи при расположении ее на краю границы ячейки межобзорного ЗУ, так как даже небольшие изменения пространственного положения помехи могут вызвать появление ее в других ячейках ЗУ. Эффективность подобных устройств еще больше снижается при картографировании перемещающихся под действием ветра пассивных помех, например отражений от метеообразований.
Данный недостаток частично устранен в устройстве, использующем для картографирования медленно перемещающихся помеховых отражений две карты помех, смещенные по координатам одна относительно другой на половину выбранного пространственного элемента. Это устройство содержит обнаружитель сигналов, подключенный к выходу приемопередатчика, первый выход обнаружителя соединен с входом первой и второй карт помех, а второй выход, совместно с выходами обеих карт помех, соответственно с тремя входами логической схемы объединения сигналов картографирования, счетчик дальности и
счетчик азимута, подключенные входами к синхронизирующим выходам приемопередатчика, а выходами к двум управляющим входам первой карты помех непосредственно и через сумматоры дальности и азимута к двум управляющим входам второй карты помех; каждая из карт помех содержит регистр записи, межобзорное ЗУ, регистр чтения, схему управления записью, одним из входов которой является входом карты помех, а выход ее входом, счетчик сегментов и схему управления адресом, выход которой через регистр записи подключен к основному входу межобзорного ЗУ, выход которого через регистр чтения соединен с вторым входом схемы управления записью,
управляющий вход которой подключен к первому выходу счетчика сегментов, второй выход которого соединен с первым входом схемы управления адресом, а вход счетчика сегментов, являющийся одним из двух управляющих входов карты помех, с вторым входом схемы управления адресом, третий вход которой является дальностным входом карты помех, а выход соединен с адресным входом межобзорного ЗУ, логическая схема объединения сигналов картографирования представляет собой последовательно соединенные схему ИЛИ-НЕ, входы которой соединены с выходами первой и второй карты помех, и схему И, второй вход которой подключен к выходу обнаружения сигналов, а выход является выходом схемы объединения сигналов картографирования.
Это устройство осуществляет идентификацию сигналов, используя в качестве критерия идентификации величину перемещения объекта в пространстве за время анализа, которое превышает время одного обзора. Увеличение времени анализа по сравнению с временем обзора позволяет более точно выявить даже небольшие скоростные различия между сигналами целей и помех.
В то же время большое время анализа затрудняет картографирование помех с быстрыми изменениями интенсивности и пространственного положения от обзора к обзору.
Недостатками этого устройства являются также ложное картографирование малоскоростных одиночных целей и увеличение объема памяти межобзорного ЗУ, что существенно затрудняет практическую реализацию устройства.
Изобретение позволяет улучшить картографирование нестационарных помех, уменьшить вероятность ложного картографирования одиночных малоскоростных целей, а также уменьшить объем памяти межобзорного ЗУ.
Указанный технический результат достигается тем, что в межобзорное устройство картографирования помех, содержащее обнаружитель радиолокационных сигналов, подключенный к выходу приемопередатчика, последовательно соединенные регистр записи, межобзорное ЗУ, регистр чтения и схему управления записью, последовательно соединенные счетчик дальности и сумматор дальности, последовательно соединенные счетчик азимута, сумматор азимута и счетчик сегментов, схему управления адресом, первый вход которой подключен к выходу сумматора азимута, а второй вход к выходу сумматора дальности, и логический элемент И, первый вход которого соединен с выходом обнаружителя сигналов, при этом выход схемы управления адресом соединен с адресным входом межобзорного ЗУ, выход счетчика сегментов соединен с управляющим входом схемы управления записью, выход которой соединен с входом регистра записи, а входы счетчика дальности и счетчика азимута подключены к синхронизирующим выходам приемопередатчика, дополнительно введены счетчик оборотов, вход которого соединен с выходом счетчика азимута, последовательно соединенные вспомогательное ЗУ и первый ждущий мультивибратор, параллельно соединенные два канала с общей точкой подключения входов к выходу логического элемента И, причем первый канал образован последовательным соединением линии задержки и второго ждущего мультивибратора, выход которого соединен с первым входом дополнительного элемента И, выход которого является общим выходом устройства, а второй канал образован последовательным соединением счетчика целей, порогового устройства и регистра, выход которого соединен с вторым входом дополнительного элемента И, при этом выход обнаружителя сигналов соединен с вторым входом схемы управления записью, выход счетчика оборотов соединен с вторыми входами сумматора дальности и сумматора азимута, вход вспомогательного ЗУ подключен к выходу схемы управления записью, а выход первого ждущего мультивибратора к второму входу логического элемента И.
На чертеже представлена функциональная схема межобзорного устройства картографирования помех, выполненного согласно изобретению и содержащего обнаружитель сигналов 1, схему 2 управления записью 8, логический элемент И 3, регистр записи 4, межобзорное ЗУ 5, счетчик сигналов 6, счетчик азимута 7, сумматор азимута 8, регистр чтения 9, вспомогательное ЗУ 10, первый ждущий мультивибратор 11, счетчик дальности 12, счетчик оборотов 13, сумматор дальности 14, схему 15 управления адресом, линию задержки 16, второй ждущий мультивибратор 17, счетчик целей 18, пороговое устройство 19, регистр 20, дополнительный элемент И 21.
Вход обнаружителя сигналов 1, подключаемый к выходу приемопередатчика РЛС, являются основным входом межобзорного устройства картографирования помех, а выход соединен с первым входом логического элемента И 3. Выход схемы 2 управления записью через регистр записи 4 соединен с входом межобзорного ЗУ 5, выход которого через регистр чтения 9 соединен с первым входом схемы 2 управления записью, второй вход которой соединен с выходом обнаружителя 1, третий вход с выходом счетчика сегментов 6, вход которого соединен с выходом счетчика азимута 7 через сумматор азимута 8, а выход схемы управления записью 2 через последовательно соединенные вспомогательное ЗУ 10 и первый ждущий мультивибратор 11 подключен к второму входу логического элемента И 3. Входы счетчика азимута 7 и счетчика дальности 12 являются синхронизирующими входами устройства, подключаемыми к синхронизирующим выходам приемопередатчика РЛС. Выход счетчика азимута 7 подключен к входу счетчика оборотов 13, выход которого соединен с вторым входом сумматора азимута 8. Выход счетчика дальности 12 соединен с первым входом сумматора дальности 14, второй вход которого подключен к выходу счетчика оборотов 13. Выходы сумматора азимута 8 и сумматора дальности 14 подключены соответственно к первому и второму входам схемы 15 управления адресом, выход которой подключен к адресному входу межобзорного ЗУ 5. К выходу логического элемента И 3 подключены два параллельных канала, первый из которых образован последовательным соединением линии задержки 16 и второго ждущего мультивибратора 17, а второй последовательным соединением счетчика целей 18, порогового устройства 19, регистра 20 и дополнительного элемента И 21, второй вход которого подключен к выходу второго ждущего мультивибратора 17, а выход является общим выходом всего устройства.
Согласно изобретению, выделение движущихся помех реализуется путем сравнения в каждом пространственном элементе текущей информации с расширенным по сравнению с элементом пространства двумерным стробом, формируемым вокруг каждой отметки от сигнала из предыдущего обзора. Размеры строба выбраны такими, что сигнал от объекта, перемещающегося со скоростью, меньше заданной, за время одного обзора не выйдет за пределы двумерного строба и идентифицируется как помеха.
Устройство работает следующим образом.
Радиолокационные сигналы с выхода приемопередатчика поступают в обнаружитель сигналов 1, где путем внутрипериодной и межпериодной обработки выделяются из внешних и собственных шумов РЛС и сравниваются с порогом обнаружения. С выхода обнаружителя 1 нормированная по амплитуде и времени однотипная информация поступает на второй вход схемы 2 управления записью и на первый вход логического элемента И 3. Схема 2 управления записью осуществляет через регистр записи 4 ввод этой информации в соответствующие ячейки межобзорного ЗУ 5, число которых выбрано равным числу N пространственных элементов, для которых размер элемента по дальности составляет половину элемента разрешения по дальности, а размер элемента по азимуту равен, например, 1,5о и соответствует нескольким периодам повторения РЛС. Память в межобзорном ЗУ 5 разделена на четыре одинаковых блока для записи текущей информации в соответствующих 90о-ных сегментах. Переключение записи информации с одного блока на другой осуществляется в схеме 2 управления записью, управляемой счетчиком сегментов 6. Для выработки 90о-ных сегментов со счетчика азимута 7 через сумматор азимута 8 на счетчик сегментов 6 поступают данные о текущем азимуте в виде К-разрядного параллельного кода.
Счетчик сегментов 6 использует два старших разряда этого кода, изменяющих свое значение четыре раза за оборот вращения антенны, т.е. через 90о (00, 01, 10 и 11). На выходе счетчика сегментов 6, представляющее собой четыре двоичных дешифратора соответственно этих четырех значений кода, формируются четыре строба, принимающих единичное значение лишь в соответствующем каждому из них 90о-ном сегменте. Таким образом, в схеме 2 управления записью в момент действия каждого из четырех стробов формируется сигнал записи для соответствующего данному 90о-ному сегменту блока ЗУ. С выхода межобзорного ЗУ 5 считанная информация из предыдущего обзора через регистр чтения 9 поступает на первый вход схемы 2 управления записью, которая осуществляет запись текущей информации в соответствующий блок межобзорного ЗУ 5, рециркуляцию этой информации в каждом 1,5о-ном секторе данного 90о-ного сегмента и перезапись этой информации в следующем обзоре во вспомогательное ЗУ 10, в целях предотвращения стирания информации из предыдущего обзора. Поскольку запись информации в межобзорное ЗУ 5 происходит в течение каждого периода повторения соответствующего 1,5о-ного пространственного сектора и информация на входе при этом может меняться от периода к периоду повторения и стирать ранее записанную, схема управления записью осуществляет режим рециркуляции в каждом 1,5о-ном секторе, т.е. единичная информация, записываемая в межобзорное ЗУ в одном из периодов повторения, перезаписывается в ту же ячейку в течение всего 1,5о-ного сектора.
Поскольку информация из межобзорного ЗУ 5 считывается последовательно один раз за 1,5о-ный сектор, равный размеру пространственного элемента по азимуту, для запоминания и хранения этой информации во вспомогательном ЗУ 10 требуется сравнительно небольшой объем ячеек, равный числу пространственных элементов по дальности.
Как указывалось выше, идентификация сигналов осуществляется, в соответствии с изобретением, путем сравнения в логическом элементе И 3 текущей информации с расширенным двумерным стробом, формируемым вокруг каждой отметки от сигнала предыдущего обзора. Формирование расширенного и межобзорного строба осуществляется в первом ждущем мультивибраторе 11, на вход которого поступает сигнал со вспомогательного ЗУ 10. При поступлении импульса сигнала с выхода вспомогательного ЗУ 10 ждущий мультивибратор 11 формирует расширенный импульс с длительностью, равной удвоенной величине максимального перемещения по дальности отметки от помехи за один обзор (τmax), и с передним фронтом, совпадающим с передним фронтом входного импульса. Поскольку расширенный межобзорный строб должен формироваться вокруг сигнальной отметки, т. е. с началом, упреждающим по времени на τmax импульс, считываемый из вспомогательного ЗУ 10, и с концом, отстоящим от него на время τmax, для реализации такого упреждения в каждом обзоре производится упреждение на τmax считывания информации из межобзорного ЗУ 5 по отношению к моменту записи в предыдущем обзоре. Это осуществляется путем непрерывного линейного изменения кода адреса межобзорного ЗУ 5 от обзора к обзору в счетчике дальности 12, счетчике азимута 7, счетчике оборотов 13, сумматоре дальности 14 и сумматоре азимута 8. Входными сигналами для счетчиков дальности 12, азимута 7 являются метки дальности и азимута соответственно, поступающие с синхронизирующих выходов приемопередатчика. На вход счетчика оборотов поступает сигнал со старшего разряда счетчика азимута, который меняется один раз за оборот вращения антенны и является сигналом нулевого азимута. В сумматорах дальности 14 и азимута 8 к текущим значениям дальности и азимута прибавляются постоянные внутри одного обзора числа, пропорциональные числу обзоров, сосчитанных к этому моменту счетчиком оборотов 13. Пространственный момент (i, j) из предыдущего обзора будет извлечен в новом обзоре из ячейки (i, j) межобзорного ЗУ 5 в момент времени, соответствующий присутствию на входе межобзорного ЗУ 5 упрежденного пространственного элемента (i-1, j-1). Таким образом осуществляется упреждению считанного из межобзорного ЗУ 5 сигнала формирования в первом ждущем мультивибраторе 11, расширенного относительно выходного сигнала обнаружителя 1 строба.
Для обеспечения картографирования помех, быстро изменяющих свое местоположение в пространстве, например, таких как передние "кромки" организованных пассивных помех, предусмотрена схема формирования второго расширенного по дальности строба вокруг каждого сигнала, прошедшего через логический элемент И 3. Размеры этого строба выбираются из условия его соответствия максимальному перемещению постановщика помех в любом из направлений за период обзора. Таким образом, из каждого сигнала, прошедшего через логический элемент И 3 и, следовательно, идентифицированного как помеха, на выходе последнего формируется дальностный строб, передний фронт которого упрежден по отношению к сигналу с выхода элемента И 3 на величину τпост vmax ˙ Tобз, где vmax максимальная скорость постановщика помех, Тобз период обзора, а задний фронт задержан на эту же величину. Это обеспечивается последовательным соединением линии задержки 16 с временем задержки Т τпост, где Т период повторения, и второго ждущего мультивибратора 17, растягивающего входной сигнал по времени на 2 τпост. Следовательно, на выходе второго ждущего мультивибратора 17 формируется межобзорный строб, обеспечивающий картографирование помехи не только в местах ее совпадения в соседних обзорах, но и с учетом ее возможного перемещения в любом направлении со скоростью постановщика помех.
Поскольку на выходе логического элемента И 3 могут картографироваться не только помехи, но и одиночные малоскоростные цели, в устройстве предусмотрена схема, исключающая выработку сигнала картографирования для целей, азимутальные координаты которых не совпадают с аналогичными координатами помех. Азимутальные направления, в которых присутствует сигнал пассивной помехи, характеризуются большим числом пораженных помехой пространственных элементов. В отличие от помехи, малоскоростные цели обнаруживаются лишь в нескольких пространственных элементах. Поэтому имеется возможность реализации энергетических различий между целями и помехой. Для этого с помощью счетчика целей 18, порогового устройства 19 и регистра 20 в каждом периоде повторения определяется число пораженных помехой элементов дальности, которое затем сравнивается с выбранным порогом. Если число таких элементов больше порога, то принимается решение о наличии в данном периоде повторения пассивной помехи. При этом с выхода регистра 20 на вход дополнительного элемента И 21 подается сигнал логической единицы, разрешающий прохождение сигнала картографирования, поступающего на второй вход дополнительного элемента И 21, на выход устройства. При непревышении выбранного порога запрещается прохождение сигнала картографирования на выход устройства.
Таким образом, изобретение обеспечивает за один обзор картографирование пассивных помех, в том числе помех, характеризующихся значительной нестационарностью, позволяет уменьшить вероятность картографирования одиночных малоскоростных целей при одновременном существенном уменьшении объема памяти в устройстве.
Использование: изобретение относится к радиолокационной технике и может быть использовано в помехозащищенных приемных устройствах для улучшения обнаружения радиолокационных сигналов на фоне пассивных помех. Технический результат заключается в повышении качества картографирования нестационарных помех, уменьшении вероятности ложного картографирования одиночных малоскоростных целей и сокращении объема памяти межобзорного запоминающего устройства (ЗУ). Сущность изобретения: обнаружитель сигналов 1 подключен к первому входу логического элемента И 3 и второму входу схемы 2 управления записью, выход которой через регистр записи 4 соединен с входом межобзорного ЗУ 5, выход которого через регистр чтения 9 соединен с первым входом схемы 2 управления записью, третьим входом соединенной с выходом счетчика сегментов 6, вход которого через сумматор азимута 8 соединен с выходом счетчика азимута 7. Выход схемы 2 управления записью через вспомогательное ЗУ 10 и первый ждущий мультивибратор 11 подключен к второму входу логического элемента И 3. Входы счетчиков азимута 7 и дальности 12 являются синхронизирующими входами. Выход счетчика азимута 7 подключен к входу счетчика оборотов 13, выход которого соединен с вторым входом сумматора азимута 8. Выход счетчика дальности 12 соединен с первым входом сумматора дальности 14, второй вход которого подключен к выходу счетчика оборотов 13. Выходы сумматоров азимута 8 и дальности 14 подключены к входам схемы 15 управления адресом, выход которой соединен с адресным входом межобзорного ЗУ 5. К выходу элемента И 3 подключены два канала, первый из которых состоит из линии задержки 16 и второго ждущего мультивибратора 17, а второй из счетчика целей 18, порогового устройства 19, регистра 20 и элемента И 21, второй вход которого соединен с выходом ждущего мультивибратора 17, а выход является выходом устройства. 1 ил.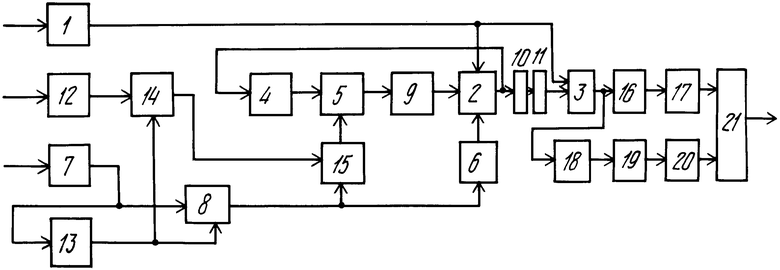
МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ, содержащее обнаружитель радиолокационных сигналов, подключенный к выходу приемопередатчика, последовательно соединенные регистр записи, межобзорное запоминающее устройство, регистр чтения и схему управления записью, последовательно соединенные счетчик дальности и сумматор дальности, последовательно соединенные счетчик азимута, сумматор азимута и счетчик сегментов, схему управления адресом, первый вход которой подключен к выходу сумматора азимута, а второй вход к выходу сумматора дальности, и логический элемент И, первый вход которого соединен с выходом обнаружителя сигналов, при этом выход схемы управления адресом соединен с адресным входом межобзорного запоминающего устройства, выход счетчика сегментов с управляющим входом схемы управления записью, а выход последней с входом регистра записи, входы счетчика дальности и счетчика азимута подключены к синхронизирующим выходам приемопередатчика, отличающееся тем, что, с целью повышения качества картографирования нестационарных помех путем устранения влияния быстро перемещающихся в пространстве областей организованных пассивных помех и уменьшения вероятности ложного картографирования одиночных малоскоростных целей, а также сокращения объема памяти межобзорного запоминающего устройства, в него дополнительно введены счетчик оборотов, вход которого соединен с выходом счетчика азимута, последовательно соединенные вспомогательное запоминающее устройство и первый ждущий мультивибратор, параллельно соединенные два канала с общей точкой подключения входов к выходу логического элемента И, причем первый канал образован последовательным соединением линии задержки и второго ждущего мультивибратора, выход которого соединен с первым входом дополнительного элемента И, выход которого является общим выходом устройства, а второй канал образован последовательным соединением счетчика целей, порогового устройства и регистра, выход которого соединен с вторым входом дополнительного элемента И, при этом выход обнаружителя сигналов соединен с вторым входом схемы управления записью, выход счетчика оборотов с вторыми входами сумматора дальности и сумматора азимута, вход дополнительного запоминающего устройства подключен к выходу схемы управления записью, а выход первого ждущего мультивибратора к второму входу логического элемента И.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4068231, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
