Изобретение относится к радиоизмерительной технике и предназначено для регистрации, исследования и измерения повторяющихся радиотехнических сигналов.
Известен стробоскопический осциллограф с цифровым запоминанием мгновенных значений сигнала, содержащий блок синхронизации, синхронизируемый генератор серий импульсов, стробоскопический преобразователь, два счетчика импульсов, два компаратора кодов, два регистра, селектор, делитель числа импульсов, аналого-цифровой преобразователь (АЦП), цифровой запоминающий блок, цифроаналоговый преобразователь (ЦАП), усилитель вертикального отклонения, электронно-лучевую трубку (ЭЛТ) [1] .
Недостатком эого осциллографа является то, что невозможно получить шаг стробирования в единицы и десятки пикосекундр, поскольку от определяется периодом импульсов серии. Современные счетчики и компараторы позволяют работать в диапазоне частот до 1 ГГц, поэтому описанное устройство может обеспечить шаг приблизительно 1 гс и быть использовано для регистрации сигналов с максимальной частотой 500 МГц.
Наиболее близким по технической сущности к заявляемому устройству является выбранный в качестве прототипа цифровой стробоскопический осциллограф 54120Т фирмы Хьюлетт-Паккард [2] , содержащий блок синхронизации, синхронизируемый генератор серий импульсов, два счетчика импульсов, регистр, формирователь строб-импульсов, блок аналоговой задержки (БАЗ), АЦП, стробоскопический преобразователь, три ЦАП, ЭЛТ, контроллер, процессор, интегратор, интерфейсную шину. Синхроимпульсы с выхода блока синхронизации поступают на БАЗ. Длительность задержки сигнала в БАЗ определяется соответствующим ЦАП. Сигнал с выхода БАЗ запускает синхронизируемый генератор. В исходном состоянии с помощью регистра счетчики устанавливаются в заданное значение. После запуска генератора серий импульсов счетчики считают заданное в регистре число импульсов и выдают сигналы, разрешающие запуск формирователя строб-импульсов. На выходе стробоскопического преобразователя образуется сигнал, пропорциональный значениям исследуемого сигнала в момент действия строб-импульсов. Этот сигнал кодируется АЦП и через интерфейсную шину передается в контроллер ЭЛТ, который преобразует информацию в вид, удобный для наблюдения на экране ЭЛТ. За каждый период повторения исследуемого сигнала кодируется одно его значение. Для изменения момента стробирования процессор через интерфейсную шину загружает в регистр и ЦАП новое значение кода задержки, после чего процесс взятия выборки сигнала повторяется.
Недостатком прототипа является значительная нелинейность временной развертки сигналов, особенно в пикосекундном диапазоне длительности. Это вызвано тем, что невозможно изготовить БАЗ с идеальной линейной характеристикой код-задержка. Кроме того, нестабильны периоды синхронизируемого генератора серий импульсов. Особенно отличается от стационарного значения первый период, поскольку переходные процессы в генераторе еще не установились. В результате этого погрешность анализа сигнала осциллографа 54120Т составляет 10-3Тх+10пс (Тх - длительность измеряемого интервала).
Технической задачей, которая решается изобретением, является снижение погрешности анализа исследуемых сигналов за счет автоматической подстройки частоты синхронизируемого генератора серий импульсов и длительности задержки в БАЗ по сигналу со стабильным периодом, получаемому благодаря использованию умножителя частоты кварцевого генератора.
Отличительными признаками заявляемого цифрового стробоскопического осциллографа (ЦСО), содержащего блок синхронизации, первый вход которого является входом синхросигнала, синхронизируемый генератор серий импульсов, выход которого соединен со счетным входом счетчика импульсов, БАЗ, формирователь строб-импульсов, первый выход которого соединен с входом запуска стробоскопического преобразователя исследуемого сигнала, первый вход которого является входом осциллографа, при этом входы управления блока синхронизации, БАЗ, стробоскопического преобразователя исследуемого сигнала и счетчика импульсов соединены соответственно с выходами первого, второго и третьего ЦАП и первым выходом первого регистра, входы которых подключены к интерфейсной шине, соединенной также с выходом АЦП и входами процессора и контроллера индикации, выход которого соединен с ЭЛТ, являются введение кварцевого генератора, умножителя частоты, стробоскопического преобразователя калибратора, первого и второго коммутаторов, второго регистра, четвертого и пятого ЦАП и особое выполнение БАЗ, формирователя строб-импульсов, синхронизируемого генератора серий импульсов.
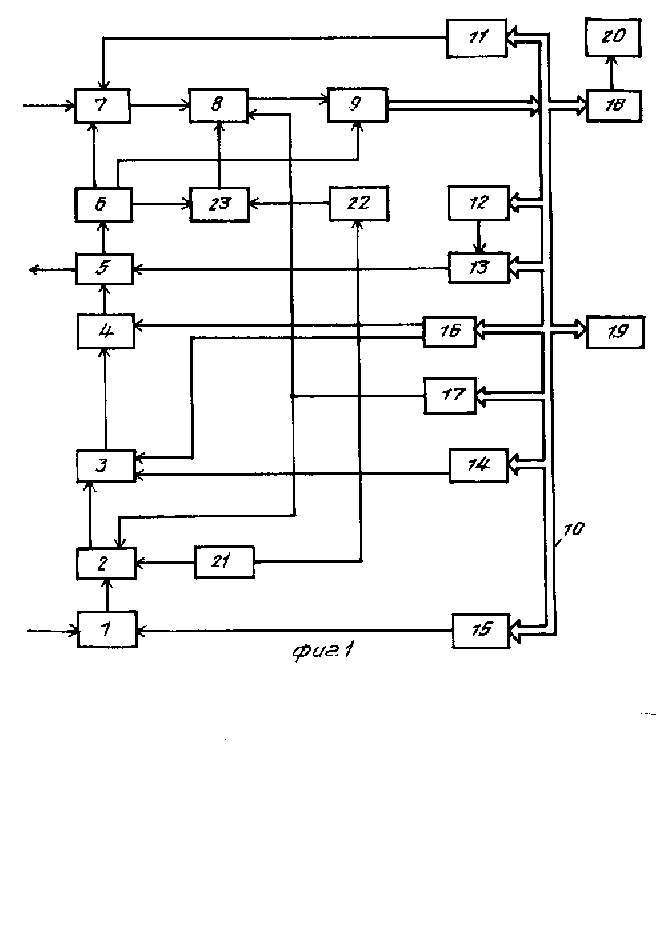
На фиг. 1 представлена блок-схема заявляемого ЦСО; на фиг. 2 - БАЗ; на фиг. 3 - формирователя строб-импульсов; на фиг. 4 - синхронизируемого генератора; на фиг. 5 - коммутатора; на фиг. 6 показан алгоритм работы процессора; на фиг. 7 - алгоритм управления "уровнем" синхронизации по команде оператора; на фиг. 8 - алгоритм управления "смещением" строб-преобразователя исследуемого сигнала; на фиг. 9 - алгоритм регистрации реализации исследуемого сигнала; на фиг. 10 - алгоритм взятия выборки сигнала с номером i; на фиг. 11 - алгоритм взятия опорной выборки сигнала; на фиг. 12 - алгоритм идентификации нелинейности БАЗ и определения координат (кодов задержки) опорных отсчетов; на фиг. 13 - алгоритм вычисления массивов кодов развертки; на фиг. 14 - алгоритм коррекции периода синхронизируемого генератора серий импульсов; на фиг. 15 - алгоритм подстройки величины максимальной задержки БАЗ.
ЦСО (фиг. 1) содержит последовательно соединенные блок 1 синхронизации, первый коммутатор 2, синхронизируемый генератор 3 серий импульсов, счетчик 4 импульсов, БАЗ 5, формирователь 6 строб-импульсов, стробоскопический преобразователь 7 исследуемого сигнала, второй коммутатор 8, АЦП 9. Вход запуска АЦП соединен с вторым выходом формирователя 6 строб-импульсов, а выход - с интерфейсной шиной 10, соединенной с цифровыми входами ЦАП 11 (третьего), 12 (четвертого), 13 (второго), 14 (пятого), 15 (первого), регистров 16 (первого), 17 (второго), контроллера 18 индикации и процессора 19. Выходы ЦАП11, 13 и 15 подключены соответственно к входам управления стробоскопического преобразователя 7, БАЗ 5 и блока 1 синхронизации. Выходы ЦАП 12 и 14 подключены соответственно к входу подстройки опорного напряжения второго ЦАП 13 и к входу подстройки синхронизируемого генератора 3 серии импульсов. Выходы первого регистра 16 подключены первый к входу управления счетчика 4 импульсов, второй к входу остановки синхронизируемого генератора 3 серии импульсов. Выход второго регистра 17 подключен к входам управления коммутаторов 2 и 8. Выход контроллера 18 индикации подключен к ЭЛТ 20. К первому входу коммутатора 2 подключен второй выход кварцевого генератора 21, а его первый выход - к входу умножителя 22 частоты. Выход умножителя частоты соединен с сигнальным входом стробоскопического преобразователя 23 калибратора, вход запуска которого соединен с третьим выходом формирователя 6 строб-импульсов, а выход - с первым входом коммутатора 8.
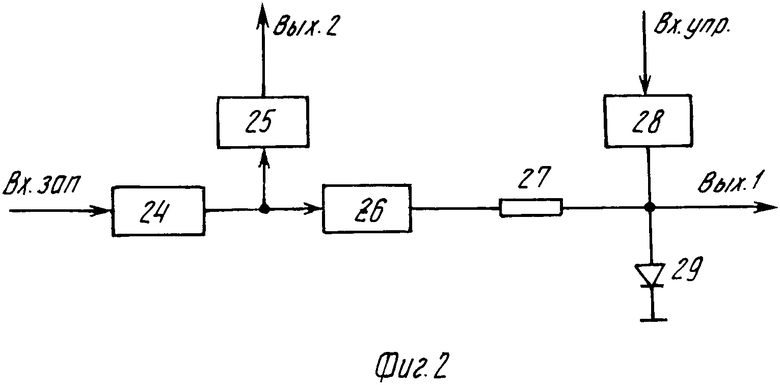
БАЗ 5 (фиг. 2) содержит буферный каскад 24, вход которого является входом запуска БАЗ 5, а выход соединен с входами формирователя 25 импульсов запуска, выход которого является вторым входом БАЗ 5, и ограничителя 26. Выход ограничителя 26 через резистор 27 соединен с выходом управляемого источника 28 тока, вход которого является входом управления БАЗ 5, и с анодом диода 29, который является первым выходом БАЗ 5. Катод диода 29 заземлен.
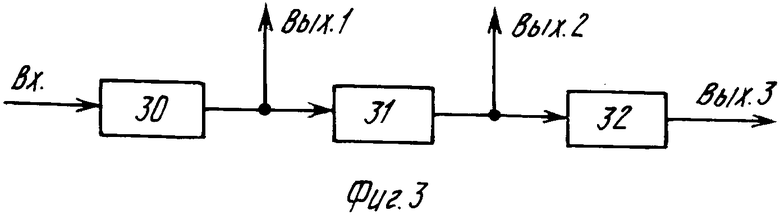
Формирователь 6 строб-импульсов (фиг. 3) содержит последовательно соединенные фиксатор 30, буферный каскад 31, оконечный формирователь 32. Выход каждого из перечисленных каскадов являются соответственно первым, вторым и третьим выходами формирователя 6.
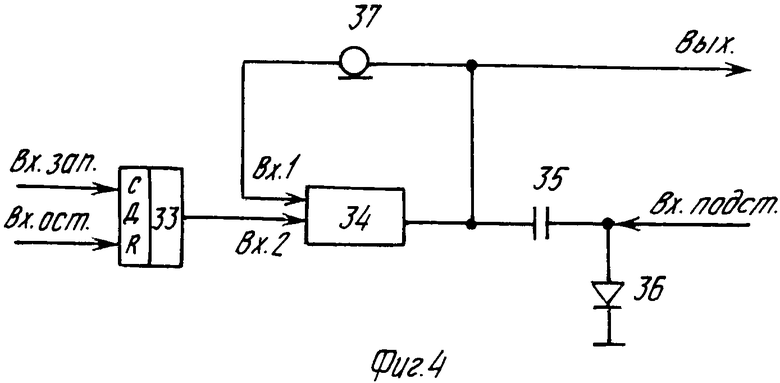
Синхронизируемый генератор 3 серий импульсов (фиг. 4) содержит последовательно соединенные D-триггер 33, логический элемент ИЛИ 34, конденсатор 35 и варикап 36, катод которого заземлен, а анод является входом подстройки генератора 3. Между первым входом логического элемента ИЛИ 34 и его выходом включена линия 37 задержки. С-вход D-триггера 33 является входом запуска генератора 3, D-вход - входом уровня логической "1", а R-вход - входом остановки. Выход логического элемента ИЛИ 34 является выходом генератора 3.
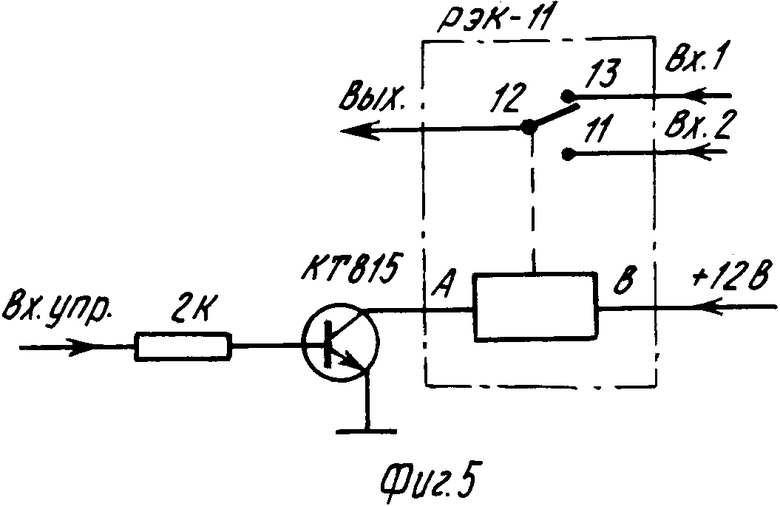
Коммутаторы 2 и 8 (фиг. 5) могут быть выполнены на реле РЭК-11 согласно прилагаемой электрической схеме.
В качестве ЦАП 11, 12, 13, 14, 15, использованы микросхемы типа КР572ПА2А в типовом включении, как показано на рис. 6.83 в [6] , а регистры 16, 17 - на микросхемах 533ИР22. Кварцевый генератор 21 и умножитель 22 частоты описаны в [5] . Описания функциональных схем блока 1 синхронизации и стробоскопических преобразователей 7, 23 приведены в [3] на рис. 5.1 и 3.3. ЭЛТ 20, счетчик 4 импульсов, АЦП9, интерфейсная шина 10, процессор 19, контроллер 18 индикации аналогичны прототипу и представлены в [2] на стр. 6В-25-6В-30.
ЦСО работает следующим образом.
При регистрации сигналов коммутаторы 2 и 8 включены так, что на вход синхронизируемого генератора 3серий импульсов поступает сигнал с блока 1 синхронизации, а на вход АЦП 9 - сигнал с выхода стробосокпического преобразователя 7 исследуемого сигнала. Под воздействием синхросигнала синхронизируемый генератор 3 серий импульсов начинает вырабатывать импульсы с периодом Т. После того, как счетчик 4 импульсов отсчитает заданное число импульсов, устанавливаемое в первом регистре 16, происходит запуск БАЗ 5. Величина задержки в БАЗ 5 определяется сигналом второго ЦАП 13. Максимальное значение задержки соответствует длительности периода Т. Сигнал с выхода БАЗ 5 запускает формирователь 6 строб-импульсов, на выходах которого формируются строб-импульсы для стробоскопического преобразователя 7 исследуемого сигнала, стробоскопического преобразователя 23 калибратора и импульс запуска АЦП 9. Строб-импульсы стробируют исследуемый сигнал на входе стробоскопического преобразователя 7 исследуемого сигнала, и на его выходе образуется аналоговое напряжение, пропорциональное значениям сигнала в момент стробирования. Это значение кодируется АЦП 9 и через интерфейсную шину 10 передается в контроллер 18 индикации. После выполнения одного цикла взятия выборки процессор 19 загружает в первый регистр 16 и второй ЦАП 13 новое значение кода задержки и цикл повторяется. Таким образом, осуществляется запись сигнала в памяти контроллера 18 индикации через заданные промежутки времени. Контроллер 18 индикации выводит информацию на экран ЭЛТ 20 для визуального просмотра. Для устранения погрешности, вызываемой неидеальностью синхронизируемого генератора 3 серий импульсов и БАЗ 5, ЦСО переходит в режим калибровки. Для этого по команде процессора 19 второй регистр 17 устанавливается в состояние, обеспечивающее переключение коммутаторов 2, 8 и подключение к входу синхронизируемого генератора 3 серий импульсов второго выхода кварцевого генератора 21, а к первому входу АЦП 9 выхода стробоскопического преобразователя 23 калибратора. На вход стробоскопического преобразователя 23 калибратора подается сигнал с умножителя 22 частоты со стабильным периодом. По командам процессора 19 происходит измерение известных временных интервалов, соответствующих целому числу периодов сигнала с выхода умножителя 22 частоты. Полученные данные используются для вычисления и записи цифровых кодов в ЦАП 12 и 14 для коррекции периода Т сигнала с выхода синхронизируемого генератора 3 сигналов импульсов и подстройки величины максимальной задержки БАЗ 5. Для получения больших временных задержек, больших длительности максимальной задержки, равной Тмакс= 2М ˙Т, где М - число разрядов счетчика 4 импульсов, используется режим отключения синхронизируемого генератора 3 серий импульсов от процессора 19. Если требуемая задержка больше величины максимальной задержки, то после стробирования процессор 19 не дает команды остановки синхронизируемого генератора 3 серии импульсов на первый регистр 16 и записи информации из АЦП 9 в контроллер 18 индикации. В этом режиме счетчик 4 импульсов циклически выдает импульсы запуска БАЗ 5 с периодом Тмакс. Счет этих периодов осуществляется процессором 19. По достижении заданного значения задержки на первый регистр 16 подается сигнал, осуществляющий выключение синхронизируемого генератора 3 серии импульсов и запись нового кода задержки в счетчик 4 импульсов. Поскольку период синхронизируемого генератора 3 серии импульсов стабилизируется по сигналу, стабильность которого определяется кварцевым генератором 21, возможна реализация значительно большей точности временной развертки сигналов. Предложенная схема позволяет устранить нелинейность задержки в БАЗ 5 с периодом синхронизируемого генератора 3 серии импульсов. Коррекция нелинейности осуществляется следующим образом. Определяются коды задержки, соответствующие заданным периодам сигнала умножителя 22 частоты (С1. . . Сn), затем осуществляются аппроксимация нелинейной зависимости кодов управления от задержки квадратичной кривой (определение коэффициентов полинома ao, a1, a2) и вычисление кодов, обеспечивающих требуемую задержку tз[с(tз)= ао+а1(tз)+а2t3] .
Наличие в БАЗ 5 выхода запуска внешнего генератора позволяет иметь меньшую нестабильность в режиме внешней синхронизации генераторов импульсов. Меньшая нестабильность получается при развертках длительностью менее максимальной задержки БАЗ 5 и обусловлена меньшим числом активных элементов в цепи запуска стробоскопического преобразователя 7 исследуемого сигнала относительно запуска внешнего генератора.
Благодаря наличию входа подстройки во втором ЦАП 13 возможна регулировка опорного напряжения. Регулировкой опорного напряжения обеспечивают компенсацию нестабильности максимального значения задержки, вызываемую температурными изменениями в БАЗ 5.
БАЗ 5 работает следующим образом. Сигнал с выхода второго ЦАП 13 поступает на управляемый источник 28 тока с большим выходным сопротивлением. Ток от источника 28 тока протекает через диод 29 с накоплением заряда и создает в нем избыточный заряд Q= i τж, где i - величина тока; τж- время жизни носителей. При запуске БАЗ 5 буферный каскад 24, представляющий собой ждущий мультивибратор [4, рис. 6.1] , вырабатывает импульс фиксированной длительности. Импульс рассасывает избыточные заряды и закрывает диод 29. Время задержки запирания диода, равное времени рассасывания зарядов, определяется выражением
t3 = τж ln 1 +
1 +  , где iобр= Еобр/R; i - величина тока рассасывания заряда;
, где iобр= Еобр/R; i - величина тока рассасывания заряда;
Еобр - напряжение ограничения в ограничителе 26.
При использовании диодов 29 с накоплением зарядов типа КД630 величина максимальной задержки может достигать 80-100 нс. Формирователь 25 импульсов запуска обеспечивает формирование сигнала на втором выходе БАЗ 5 с требуемыми амплитудой и длительностью. Ограничитель предназначен для стабилизации напряжения Еобр, определяющего обратный ток диода 29, и выполнен на диоде Шоттки, к одному из выводов которого подключен источник стабильного напряжения.
Формирователь 6 строб-импульсов (фиг. 3) с помощью фиксатора 30, представляющего собой мультивибратор, фиксирует момент пересечения выходным сигналом БАЗ 5 заданного уровня напряжения и формирует импульс со стабильной амплитудой (сигнал с выхода БАЗ 5 уменьшается по амплитуде с ростом задержки). Сигнал с выхода фиксатора 30 запускает стробоскопический преобразователь 7 исследуемого сигнала и через буферный каскад 31, представляющий собой эмиттерный повторитель, оконечный формирователь 32. Кроме того, сигнал с выхода буферного каскада 31 запускает АЦП 9. Оконечный формирователь 32 фиксирует импульсы запуска стробоскопического преобразователя 23 калибратора и выполнен по схеме, представленной в [3] на рис. 2.11.
Синхронизируемый генератор 3 серий импульсов (фиг. 4) работает следующим образом. С приходом импульса синхронизации с блока 1 через коммутатор 2 на С-вход D-триггера 33 на его выходе образуется уровень логического "0". Логический элемент ИЛИ 34 начинает переключаться с периодом, соответствующим длительности задержки в линии 37 задержки. Подстройка периода в небольших пределах, компенсирующая температурные изменения периода колебаний, осуществляется изменением емкости варикапа 36, подключенного к выходу логического элемента ИЛИ 34 через конденсатор 35. Выключение синхронизируемого генератора 3 осуществляется подачей уровня логического "0"на R-вход D-триггера 33.
Заявляемый ЦСО имеет период Т генератора серий импульсов, равный 49 нс. Частота сигнала с выхода умножителя частоты 2 ГГц. Для коррекции нелинейности задержки в БАЗ измерялось 80 значений периодов сигнала с выхода умножителя частоты. Подстройка периода синхронизируемого генератора и коррекция нелинейности задержки БАЗ позволили получить погрешности анализа сигнала ЦСО 10-5 Тх+5пс, т. е. снизить по сравнению с прототипом более чем на порядок. Кроме того, нестабильность синхронизации генератора импульсов на временных интервалах до 40 нс не превышает 1 пс (среднеквадратическое значение. У прототипа (НР54120Т) этот параметр составляет 2пс.
Описание алгоритмов управления работой блоков ЦСО процессором 19 приведено ниже.
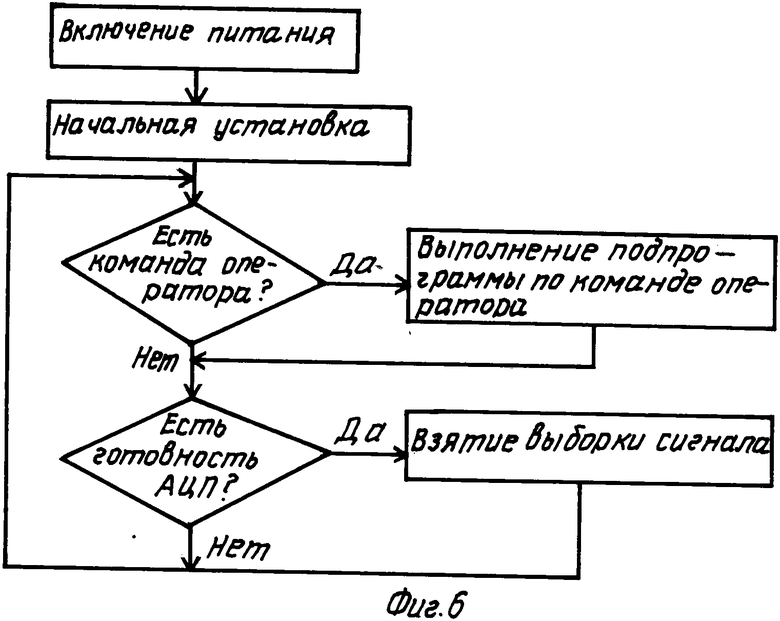
На фиг. 6 приведен главный алгоритм процессора 19, определяющий функционирование устройства в целом. После включения питания, во время начальной установки процессор выполняет такие типовые действия, как самоконтроль, проверка исправности контроллера индикации, установка в исходные состояния напряжений компенсации (третий ЦАП), уровня синхронизации (первый ЦАП). Далее вплоть до выключения питания процессор выполняет две основные функции: реагирует на команды оператора, выполняя те или иные подпрограммы, и обеспечивает циклическое взятие выборок (отсчетов) сигналов.
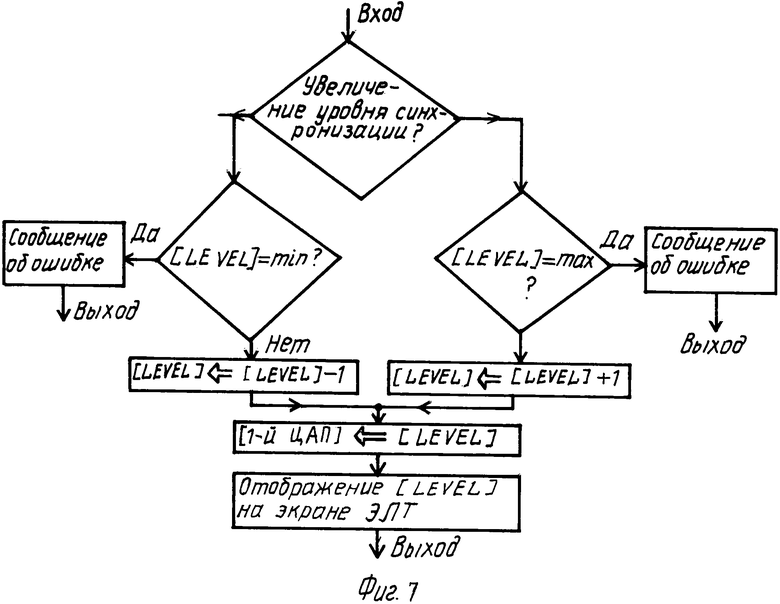
На фиг. 7 приведен алгоритм управления "уровнем" синхронизации по команде оператора. Текущее значение "уровня" хранится в ячейке памяти LEVEL. Вначале определяется направление изменения "уровня" - увеличение или уменьшение. Затем текущее значение "уровня" сравнивается с нижним или верхним граничным значением. Если параметр "уровень" может выйти за допустимые пределы, то выдается сообщение об ошибке и сохраняется прежнее значение "уровня". Если значение параметра не выходит за пределы, то происходит увеличение (или уменьшение) содержимого ячейки памяти LEVEL, а затем измененное значение "уровня" переписывается в ЦАП 15. Новое значение "уровня" тоже отобра- жается на экране ЭЛТ в алфавитно-цифровом виде для визуального наблюдения оператором.
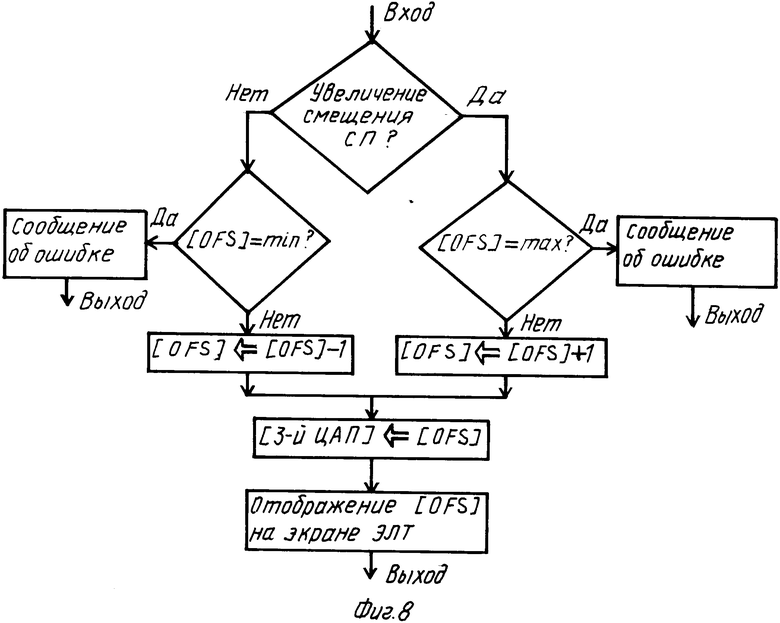
На фиг. 8 приведен алгоритм управления "смещением" стробоскопического преобразователя исследуемого сигнала. Текущее значение "смещения" хранится в ячейке памяти OFS. Управление "смещением" производится путем записи содержимого ячейки OFS в ЦАП 11. В остальном алгоритм на фиг. 8 аналогичен алгоритму на фиг. 7.
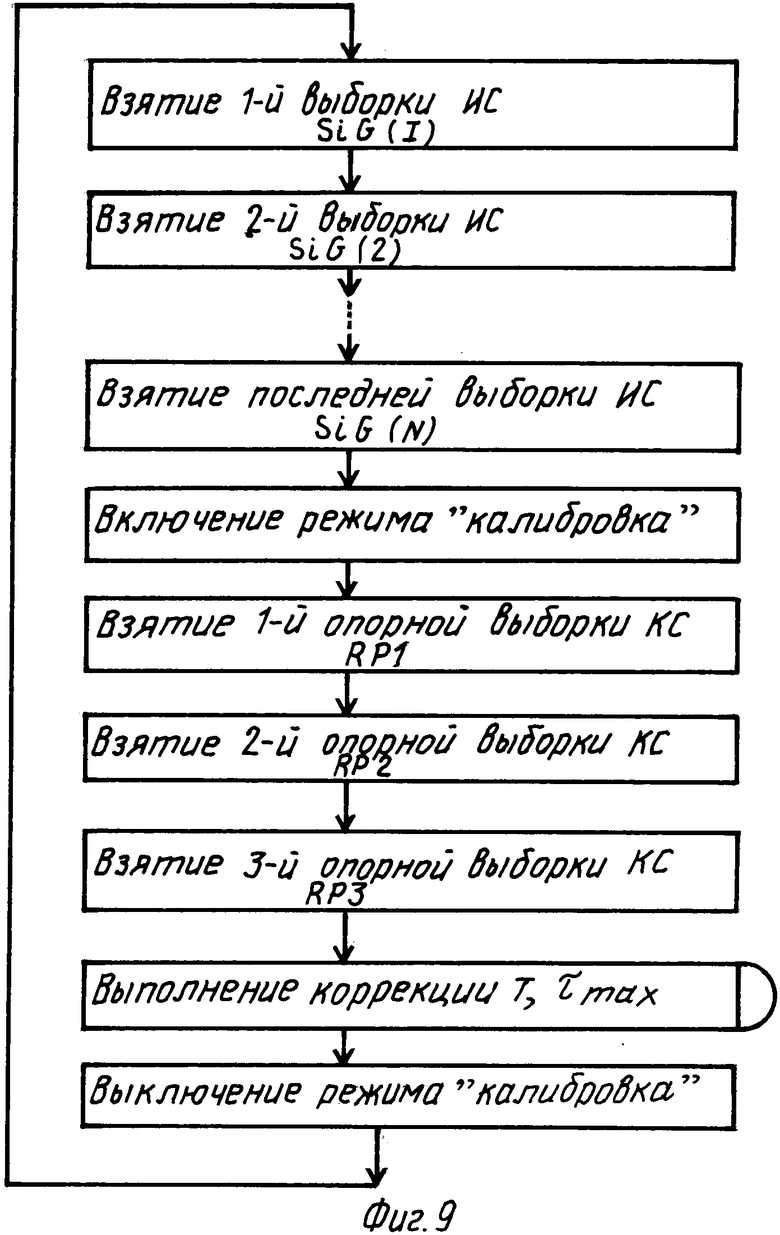
На фиг. 9 показан алгоритм регистрации реализации исследуемого сигнала. Он главным образом составлен из блоков "взятие выборки", аналогичных блоку на фиг. 6. Из сопоставления этих блоков следует, что между блоками на фиг. 9 могут выполняться какие-либо команды оператора. Однако, поскольку эти команды не влияют на последовательность и внутреннее пополнение блоков на фиг. 9, а их появление случайно во времени, то блоки выполнения команд оператора на фиг. 9 отсутствуют. Вначале последовательно регистрируются N выборок исследуемого сигнала siG(i), i=  . Затем процессор 19 записывает в регистр 17 логическую "1", включается режим "калибровка". При этом генератор 3 синхронизируется от кварцевого генератора 21, а на вход АЦП 9 поступает сигнал с выхода стробоскопического преобразователя 23 калибратора. Выполняется взятие трех опорных выборок сигнала калибратора КС: RP1, RP2, RP3. На основе анализа опорных выборок RP1, RP3 выполняется коррекция периода Т синхронизируемого генератора 3 путем вычисления и записи в ЦАП 14 кода коррекции. На основе анализа опорных выборок RP1, RP2 выполняется коррекция максимальной задержки БАЗ 5 путем вычисления соответствующего кода и записи в ЦАП 12. После этого заключается режим "калибровка", процессор 19 записывает в регистр 17 логический "0", при этом генератор 3 синхронизируется от внешнего синхросигнала, а на вход АЦП 9 подается сигнал с выхода стробоскопического преобразователя исследуемого сигнала. Цикл регистрации исследуемого сигнала повторяется.
. Затем процессор 19 записывает в регистр 17 логическую "1", включается режим "калибровка". При этом генератор 3 синхронизируется от кварцевого генератора 21, а на вход АЦП 9 поступает сигнал с выхода стробоскопического преобразователя 23 калибратора. Выполняется взятие трех опорных выборок сигнала калибратора КС: RP1, RP2, RP3. На основе анализа опорных выборок RP1, RP3 выполняется коррекция периода Т синхронизируемого генератора 3 путем вычисления и записи в ЦАП 14 кода коррекции. На основе анализа опорных выборок RP1, RP2 выполняется коррекция максимальной задержки БАЗ 5 путем вычисления соответствующего кода и записи в ЦАП 12. После этого заключается режим "калибровка", процессор 19 записывает в регистр 17 логический "0", при этом генератор 3 синхронизируется от внешнего синхросигнала, а на вход АЦП 9 подается сигнал с выхода стробоскопического преобразователя исследуемого сигнала. Цикл регистрации исследуемого сигнала повторяется.
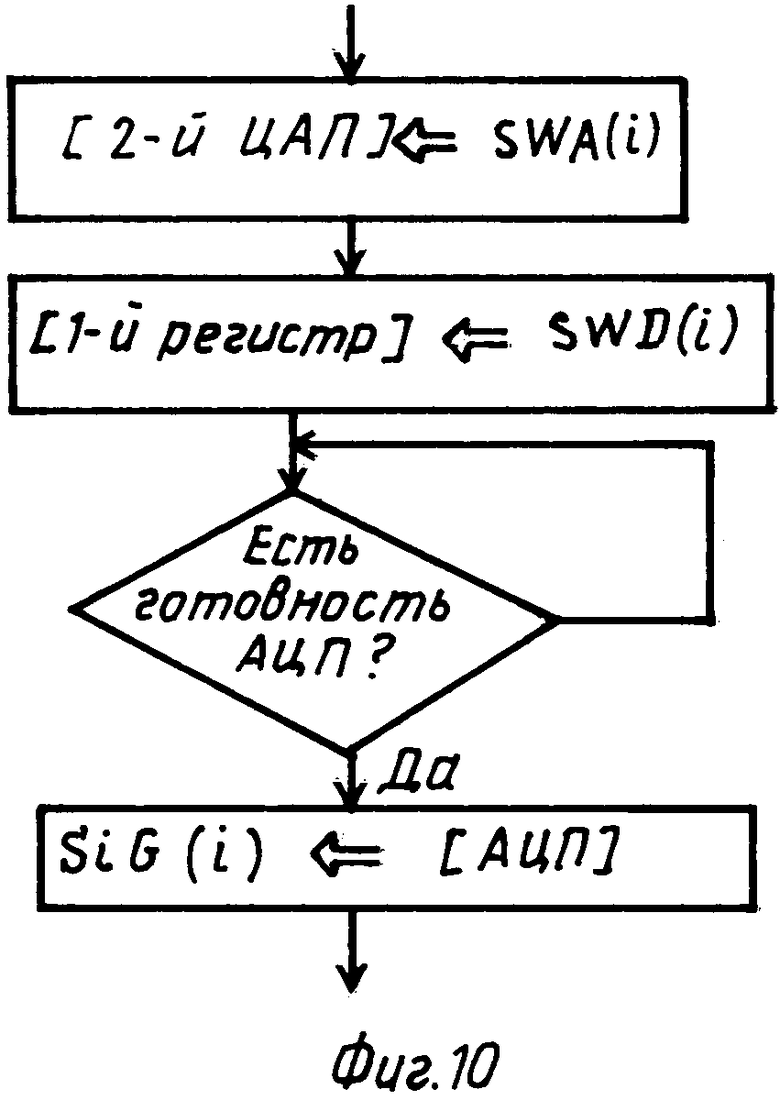
На фиг. 10 показан алгоритм взятия выборки сигнала с номером, который идентичен алгоритму прототипа. Величина задержки, определяющая временное положение выборки сигнала, задается цифpовыми кодами, записываемыми в ЦАП 13 и в регистр 16. Эти цифровые коды SWA(i) - код, управляющий БАЗ, и SWD(i) - код, управляющий счетчиком 4, вычисляются заранее и хранятся в памяти процессора в виде массивов размерности N, где N - число точек развертки. Вычисление этих массивов производится по алгоритму, показанному на фиг. 13, при изменении параметров развертки осциллографа (длительности развертки, начальной задержки). После того, как счетчик 4 и БАЗ 5 отработают заданную задержку, стробоскопический преобразователь возьмет выборку сигнала, АЦП преобразует величину напряжения в цифровой код, который запоминается в ячейке памяти SIG(i).
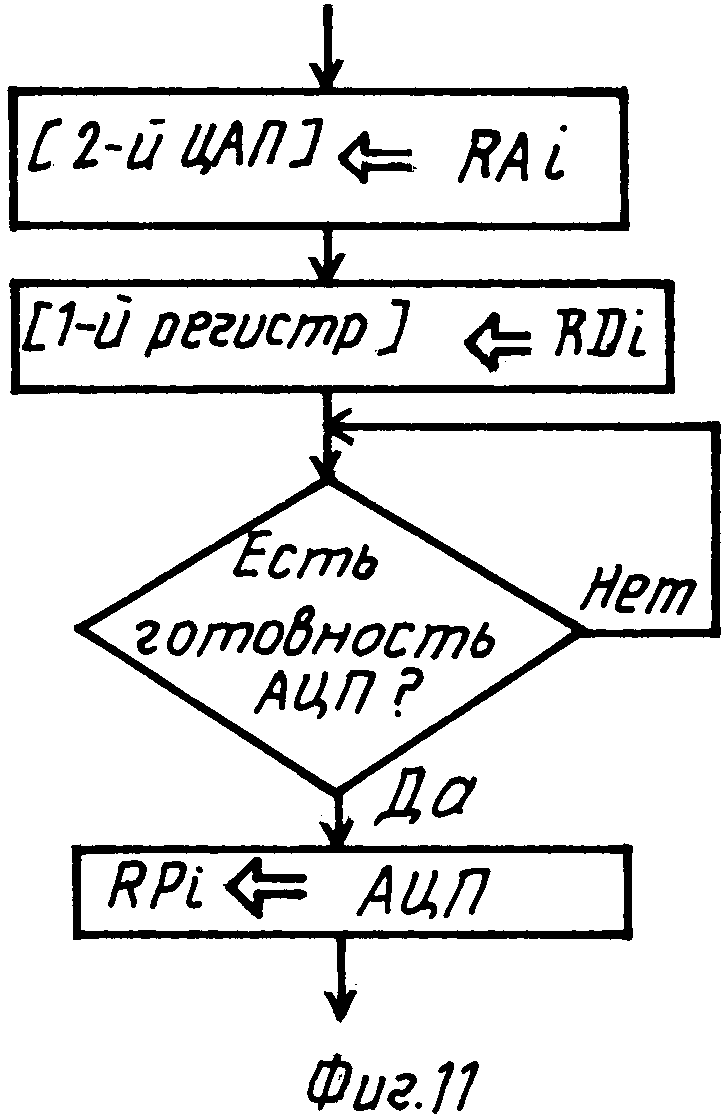
Алгоритм взятия опорной выборки сигнала калибратора RPi, показанный на фиг. 11, аналогичен предыдущему. Коды задержки RAi, RDi, i= 1,3, также вычисляются заранее.
Для калибровки развертки осциллографа используется сигнал с известным периодом Т, формируемый умножителем 22 частоты из сигнала генератора 21 с кварцевой стабилизацией частоты. Возможность взятия выборок этого сигнала обеспечивается введенными стробоскопическим преобразователем 23 калибратора и первым и вторым коммутаторами 2 и 8, а также регистром 17. Калибровка развертки осциллографа сводится к следующему.
1. Идентификация нелинейности БАЗ (вычисление коэффициентов аппроксимирующих полиномов). Определение координат опорных отсчетов (выполняется однократно после включения прибора).
2. Коррекция нелинейности БАЗ. Выполняется при вычислении массива развертки SWA(i) с использованием полученных коэффициентов полиномов.
3. Коррекция периода Т сигнала синхронизируемого генератора 3 и величины максимальной задержки БАЗ τмакс. Выполняется после регистрации каждой реализации исследуемого сигнала или через определенные промежутки времени.
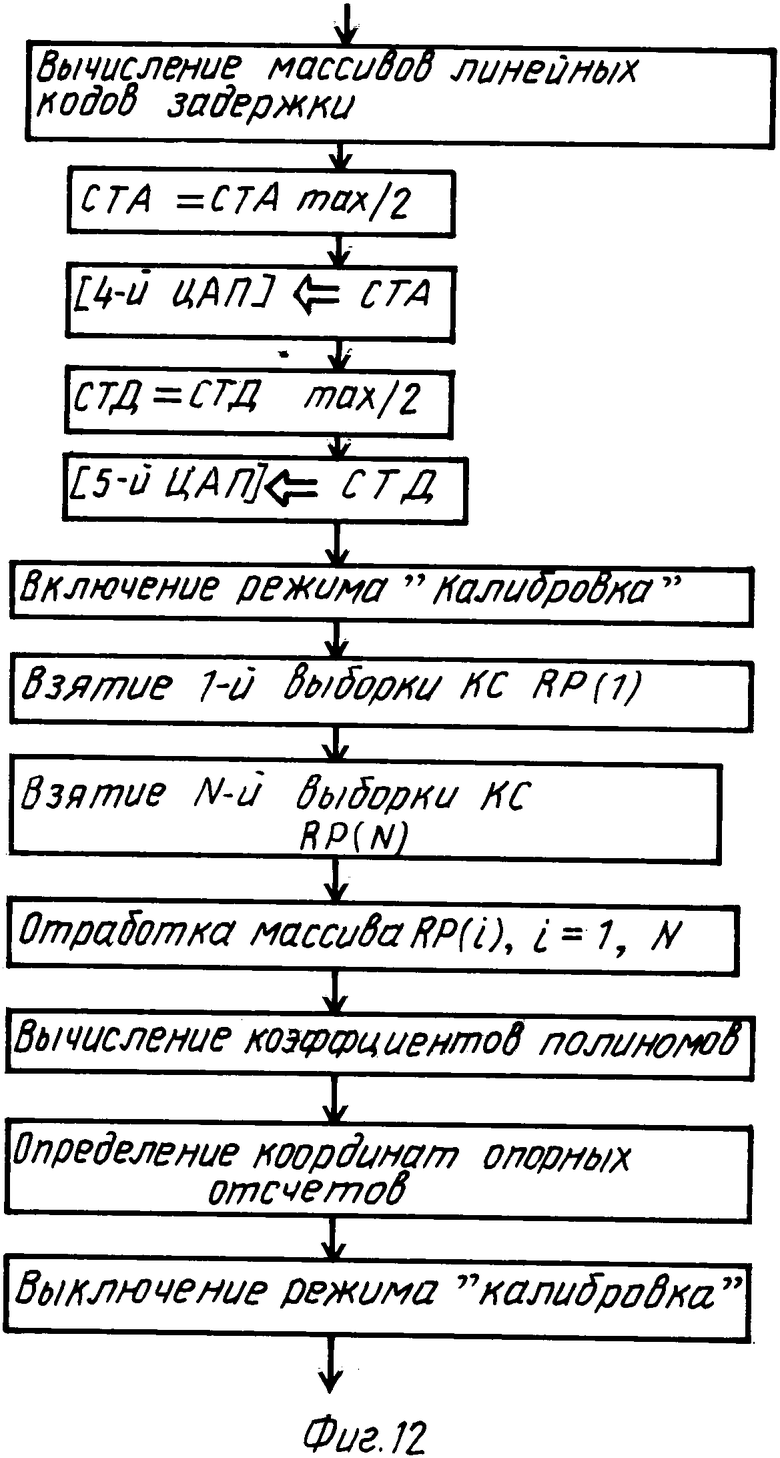
На фиг. 12 показан алгоритм идентификации нелинейности БАЗ и определения координат (кодов задержки) опорных отсчетов. Вначале формируется массив линейных кодов задержки WAмакс(i-1)/(N-1)
WAмакс(i-1)/(N-1)

В четвертый и пятый ЦАП записываются управляющие коды, равные половине максимальных. Поскольку идентифицируется нелинейность БАЗ, то код задержки счетчика 4 равен нулю для всех выборок сигнала, а код задержки БАЗ линейно возрастает от нуля для первой выборки сигнала до максимального значения SWAмакс для последней выборки.
Далее включается режим "калибровки" и регистрируется реализация из N выборок сигнала калибратора RP(i), i=  . На выходе умножителя 22 частоты имеется синусоидальный биполярный сигнал с периодом
. На выходе умножителя 22 частоты имеется синусоидальный биполярный сигнал с периодом  . Полученный сигнал RP(i) искажен за счет неэквидиcтантности моментов взятия его выборок. Обработка массива значений RP(i) заключается в локализации моментов перехода значений сигнала через ноль to, t1, . . . , t1и определении соответствующих этим моментам кодов задержки Со, С1, . . . , CL. Направление SD первого перехода через ноль фиксируется, и далее принимаются во внимание только переходы того же направления. SD= + 1, если переход положителен, SD= -1, если отрицателен.
. Полученный сигнал RP(i) искажен за счет неэквидиcтантности моментов взятия его выборок. Обработка массива значений RP(i) заключается в локализации моментов перехода значений сигнала через ноль to, t1, . . . , t1и определении соответствующих этим моментам кодов задержки Со, С1, . . . , CL. Направление SD первого перехода через ноль фиксируется, и далее принимаются во внимание только переходы того же направления. SD= + 1, если переход положителен, SD= -1, если отрицателен.
Число периодов сигнала калибратора, соответствующее изменению задержки в БАЗ от τмин(SWA = 0) до τмакс(SWA= SWAmax), равно L (числу пересечений нуля +1). L должно быть велико, чтобы получить достаточно информации о нелинейности БАЗ. В то же время число выборок на период сигнала калибратора N/L должно быть не менее 15-20 (в противном случае уменьшается точность локализации момента перехода сигнала через ноль и увеличивается погрешность коррекции нелинейности БАЗ). В заявляемом ЦСО L= 80.
Для коррекции нелинейности весь диапазон задержки БАЗ разбивается на неперекрывающиеся участки
to. . . . t1. . . t2
t2. . . t3. . . t4
t4. . . t5. . . t6
. . . . . . . . . . .
tL-2. . . tL-1. . . tL, ограниченные "нулями" сигнала калибратора.
Для первого участка рассчитываются значения коэффициентов аппроксимирующего полинома:
ao(1) = Co;
a ;
;
a .
.
Затем аналогично определяются коэффициенты ao(k); a1(k), a2(k)для остальных участков с номерами k= 2. . . L/2:
ao(k)= C2(k-1);
a ;
;
a .
.
После этого определяется значение задержки первого нуля toкалибровочного сигнала. Для этого проводится экстраполяция влево от первого участка (например, по методу Ньютона с использованием коэффициентов ao(1), a1(1), a2(1).
В качестве координат опорных отсчетов используются следующие значения

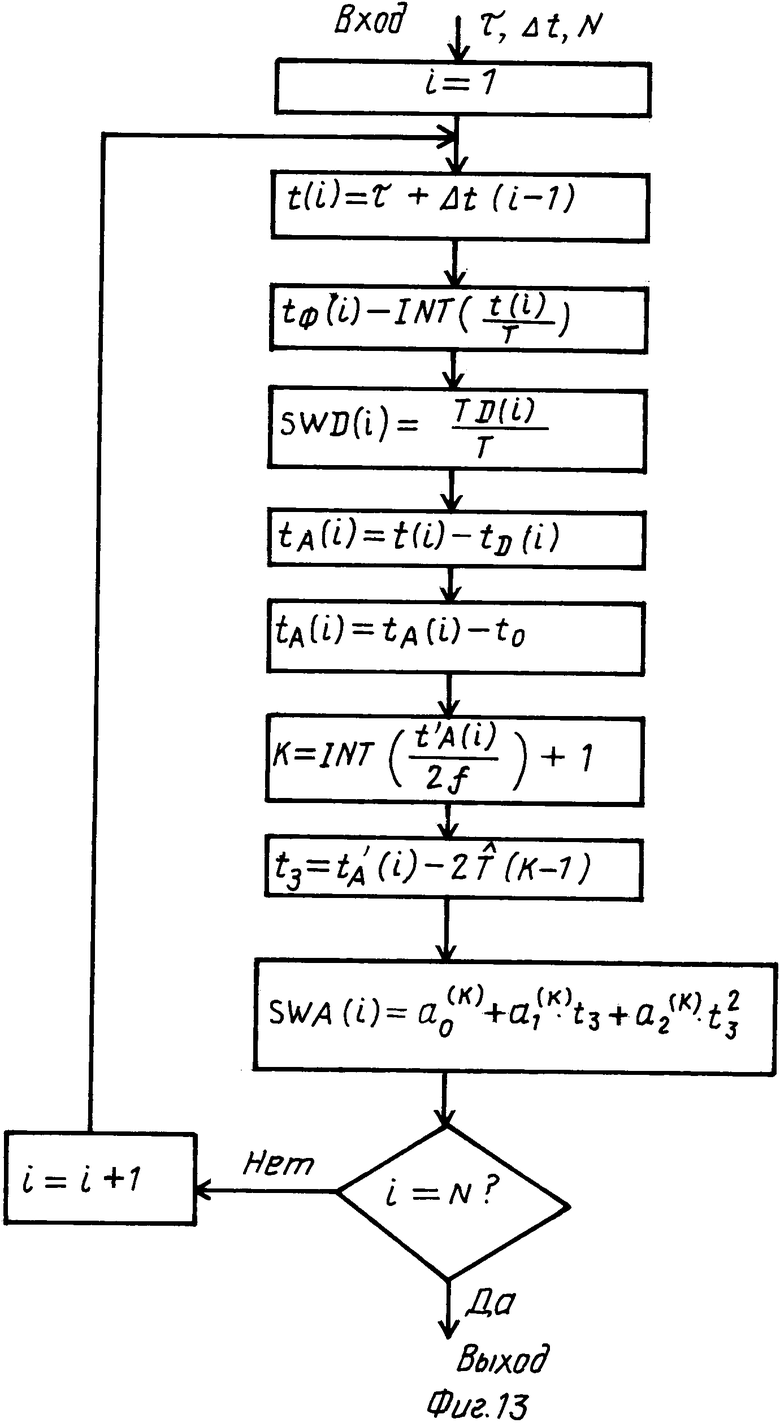
На фиг. 13 изображен алгоритм вычисления массивов кодов развертки с кусочно-квадратической аппроксимацией нелинейной зависимости задержки БАЗ от кодов управления.
Входными данными являются число отсчетов N, начальная задержка τ и шаг развертки Δt. Программа выполняется циклически для кодов задержки с номерами от 1 до N. Вначале определяется общее время задержки ti для выборки с номером i. Затем выделяется часть задержки to(i), кратная периоду Т колебаний синхронизируемого генератора 3, вычисляется и запоминается код SWD(i) управления счетчиком 4. Из остатка tA(i)<T вычитается значение задержки первого нуля to и определяется номер k участка аппроксимации, а затем с использованием коэффициентов ao(k), a1(k), ao(k) вычисляется и запоминается код SWA(i) управления задержкой БАЗ.
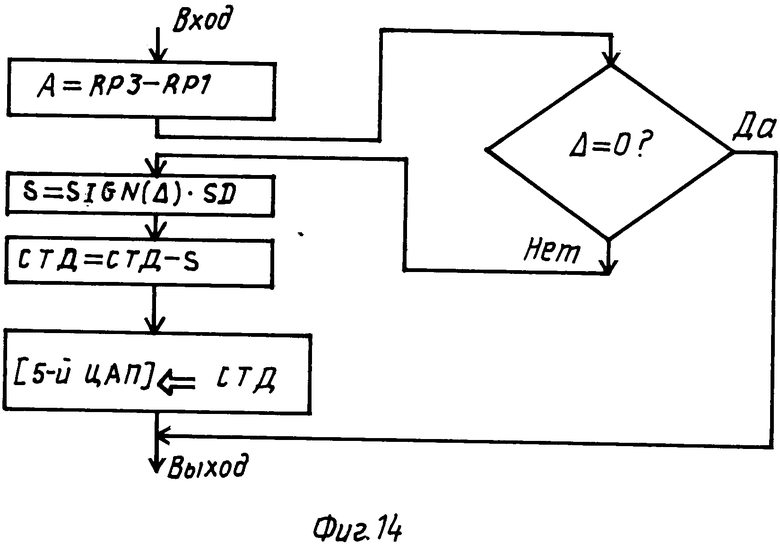
На фиг. 14 приведен алгоритм коррекции периода Т синхронизируемого генератора 3 серий импульсов. Вначале вычисляется разность значний третьей и первой опорных выборок сигнала калибратора. Интервал времени между этими выборками равен T. Если величина Т кратна периоду калибровочного сигнала, то разность Δ равна нулю. Если Т отличается от требуемой величины, то и Δ отлична от нуля. Поскольку опорные выборки берутся из сигнала вблизи пересечения им нуля, т. е. на участке с максимальной крутизной, то обеспечивается наибольшая чувствительность преобразования временного сдвига в напряжение.
Направление коррекции (увеличение или уменьшение корректирующего параметра СТД, хранящегося в памяти процессора) зависит от знака Δ и от знака SD наклона сигнала в момент пересечения нуля. Если эти знаки совпадают, то изменение параметра отрицательно, если противоположны - положительно. После вычисления величина СТД записывается процессором 19 в ЦАП 14, который подстраивает период Т генератора 3.
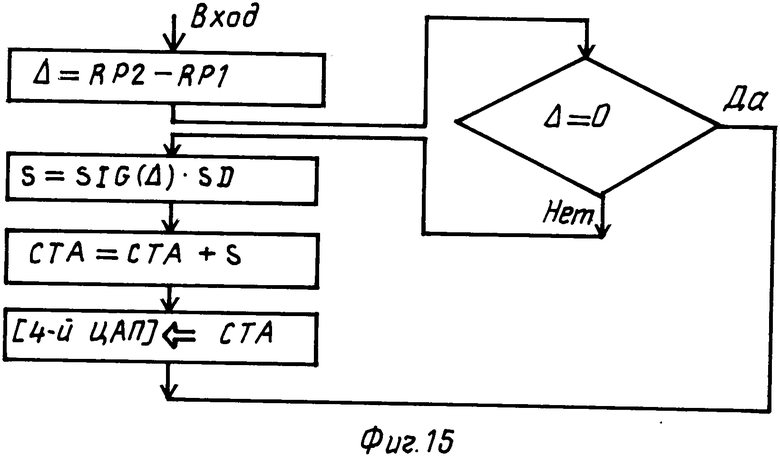
На фиг. 15 изображен алгоритм подстройки величины максимальной задержки БАЗ 5. Алгоритм аналогичен предыдущему. Разность значений второй и первой опорных выборок характеризует исключительно БАЗ, поскольку интервал времени между этими выборками - это интервал между первым и последним нулями калибровочного сигнала, равный  (L-1). Коды задержки RA1= Co, RA2= CL определяются при калибровке, и если за прошедшее с момента калибровки времени характеристики БАЗ не изменились, то разность Δ = RP2= RP1 равна нулю. Если задержка τмакс увеличилась или уменьшилась по сравнению с первоначальной, то изменилось значение задержки, соответствующее кодам RA1, RA2, и Δ отлична от нуля. По аналогии с предыдущим алгоритмом определяется знак регулирования. Вычисленная величина параметра СТА записывается в четвертый ЦАП, что приводит к изменению временного масштаба БАЗ.
(L-1). Коды задержки RA1= Co, RA2= CL определяются при калибровке, и если за прошедшее с момента калибровки времени характеристики БАЗ не изменились, то разность Δ = RP2= RP1 равна нулю. Если задержка τмакс увеличилась или уменьшилась по сравнению с первоначальной, то изменилось значение задержки, соответствующее кодам RA1, RA2, и Δ отлична от нуля. По аналогии с предыдущим алгоритмом определяется знак регулирования. Вычисленная величина параметра СТА записывается в четвертый ЦАП, что приводит к изменению временного масштаба БАЗ.
На фиг. 12 показано, что при калибровке параметрам СТА и СТР присваиваются значения, равные половине максимальных. Диапазон подстройки Т и τмакс устанавливается таким, чтобы можно было скомпенсировать любые изменения этих параметров, вызываемые различными возмущающими факторами в пределах допустимых условий эксплуатации осциллографа. (56) 1. Авторское свидетельство СССР N 911342, кл. G 01 R 13/20, 1982.
2. HP54120T Digitising oscilliscope - Service Manual Henletl-Packord, 1988 (рис. 6В-25-6В-30).
3. Рябинин Ю. А. Стробоскопическое осциллографирование. М. : Сов. радио, 1978.
4. Справочник по импульсной технике. /Под редакцией В. М. Яковлева, Киев: Техника, 1970.
5. Аппаратура для частотных и временных измерений. / Под ред. А. П. Горшкова, М. : Сов. радио, 1971, с. 73.
6. Аналоговые и цифровые интегральные микросхемы. / Под ред. С. В. Якубовского. М. : Радио и связь, 1984, с. 356.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ОСЦИЛЛОГРАФ | 1992 |
|
RU2010238C1 |
| СЕЛЕКТОР ИМПУЛЬСОВ | 1992 |
|
RU2010423C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1990 |
|
RU2010427C1 |
| ЦИФРОВОЙ СИНТЕЗАТОР СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1991 |
|
RU2010414C1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОГНОЗА СОСТОЯНИЯ И ОТБРАКОВКИ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1991 |
|
RU2010321C1 |
| УСТРОЙСТВО ДЛЯ ИЗЛУЧЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1992 |
|
RU2010457C1 |
Изобретение относится к радиоизмерительной технике. Сущность изобретения: осциллограф содержит блок 1 синхронизации, синхронизируемый генератор 3 серий импульсов, счетчик 4 импульсов, блок 5 аналоговой задержки, формирователь 6 строб-импульсов, стробоскопический преобразователь 7 исследуемого сигнала, АЦП 9, три ЦАП 11, 13, 15, первый регистр 16, контроллер 18 индикации, процессор 19, ЭЛТ 20, интерфейсную шину 10. Новым в осциллографе является введение в него кварцевого генератора 21, умножителя 22 частоты, стробоскопического преобразователя 23 калибратора, двух коммутаторов 2, 8, четвертого и пятого ЦАП 12 и 14 и второго регистра 17. Период синхронизируемого генератора 3 серии импульсов стабилизируется по сигналу, стабильность которого определяется кварцевым генератором 21, поэтому возможна реализация значительно большей точности временной развертки сигналов. Схема позволяет устранить нелинейность задержки в блоке 5 с периодом синхронизируемого генератора 3 серии импульсов. 3 з. п. ф-лы, 15 ил.