Изобретение относится к авиационной технике.
У известных легких самолетов с жесткими несущими поверхностями крыло обычно строится как плоская оболочка, к которой подвижно присоединены дополнительные элементы типа пластин или оболочек. Это, в частности, относится к летательному аппарату, в котором каждое крыло построено как плоская оболочка, к концу которой прикреплены перовидные лопатки. В этом аппарате имеется приводной механизм, обеспечивающий возможность маховых движений крыльев. Кроме того, есть механизм для регулирования тяги и подъемной силы крыла путем автоматического изменения углов атаки перовидных лопаток. Аппарат снабжен горизонтальным оперением с рулями управления.
Построение крыла самолета с использованием пластин или плоских оболочек приводит к избыточному весу крыла при заданных основных геометрических характеристиках (площадь крыла, удлинение, относительная толщина и ее распределение по размаху) и заданном запасе прочности. Это можно объяснить тем, что картина изменения моментов, соответствующих различным сечениям, в консольной пластине менее благоприятна с точки зрения оптимизации веса, чем картина изменения моментов в конструкции, составленной из примыкающих элементарных консольных балок и воспринимающей ту же распределенную нагрузку, что и консольная пластина.
В указанном летательном аппарате крыло излишне тяжелое. Кроме того, недостатком является то, что крыло не может быть сложено после окончания полета.
Управление аппаратом, осуществляемое путем изменения углов атаки рулей и элементов крыла, недостаточно эффективно, например по критерию длины участка взлета (или посадки). Более эффективным является управление путем изменения геометрии крыла в плане, так как при этом может существенно изменяться плечо подъемной силы относительно центра тяжести летательного аппарата.
Основной задачей предлагаемого технического решения является снижение веса крыла самолета при известных основных геометрических характеристиках крыла и заданном запасе прочности. Дополнительной задачей (для случая управления с помощью крыла) является обеспечение возможности управления путем изменения формы крыла в плане, а также обеспечение возможности складывания крыла.
Для снижения веса каждое крыло выполнено в виде ряда перьев, любое из которых состоит из стержня кольцевого сечения и присоединенных к стержню консольных балок, оси которых принадлежат одной поверхности. Размеры сечений стержня и присоединенных к нему консольных балок подобраны так, чтобы обеспечить заданную прочность, в то же время удовлетворяя ограничениям на изменение диаметра стержня вдоль его оси (изменение толщины крыла по размаху) и на высоты поперечных сечений консольных балок. Высота поперечного сечения каждой консольной балки ограничена, например, наименьшим внешним диаметром сечения стержня. Форма поперечного сечения балки может быть, в частности, Т-образной с постоянной шириной и изменяющейся вдоль оси балки высотой.
Вес крыла, построенного в виде ряда консольных перьев, тем меньше, чем больше число перьев, входящих в него (при заданной форме в плане). Минимальный вес крыла близок к суммарному весу стержней перьев, если их число велико, и оценивается по формуле

 dy, где γ - удельный вес материала крыла, σ - разрушающее напряжение, Р - расчетная нагрузка на крыло, l - длина стержня каждого пера, f(y) - вогнутая убывающая функция, описывающая изменение внешнего радиуса сечения стержня каждого пера по длине (изменение полутолщины крыла по размаху).
dy, где γ - удельный вес материала крыла, σ - разрушающее напряжение, Р - расчетная нагрузка на крыло, l - длина стержня каждого пера, f(y) - вогнутая убывающая функция, описывающая изменение внешнего радиуса сечения стержня каждого пера по длине (изменение полутолщины крыла по размаху).
Если крыло не используется для управления движением, то стержни всех перьев крыла присоединяются к фюзеляжу неподвижно. В этом случае управление движением может осуществляться, например, путем изменения величины и направления вектора тяги.
Если же крыло используется для управления движением, то в этом случае необходимое управление осуществляется путем изменения формы крыла в плане, причем так, что обеспечивается: 1) возможность перемещения точки приложения подъемной силы каждого крыла вдоль продольной оси фюзеляжа, 2) возможность изменения величины подъемной силы каждого крыла. Такое управление обеспечивается путем согласованного поворота всех перьев одного крыла вокруг осей, перпендикулярных одной плоскости (образно говоря, путем поворота перьев в плоскости крыла).
Для этого к фюзеляжу прикреплена направляющая крыла, имеющая две параллельные плоскости. Стержень каждого пера одного крыла посажен на удерживающую трубку этого пера, а эта трубка соединена с направляющей с возможностью поворота вокруг оси, перпендикулярной плоскостям направляющей. Параллельные плоскости направляющей ограничивают с двух сторон перемещение удерживающей трубки пера вдоль оси поворота, по этим плоскостям удерживающая трубка может скользить при повороте. К удерживающим трубкам всех перьев одного крыла и к направляющей крыла присоединен механизм, предназначенный для одновременного поворота этих трубок вместе с перьями по любому из двух вариантов: 1-й вариант - когда все удерживающие трубки поворачиваются приблизительно на один и тот же угол, 2-й вариант - когда удерживающие трубки поворачиваются на разные приблизительно пропорциональные углы. В первом варианте перемещаются вдоль оси фюзеляжа точки приложения аэродинамических сил, действующих на крыло, что позволяет, в частности, создавать необходимый управляющий момент тангажа. Во втором варианте изменяется площадь крыла и, соответственно, изменяются величины аэродинамических сил, приложенных к нему, что позволяет, в частности, создавать необходимый управляющий момент крена.
Каждое крыло самолета имеет свою направляющую и свой механизм поворота удерживающих трубок перьев. В этот механизм, в частности, включены однотипные параллельные звенья, каждое из которых одним концом свободно посажено на ось поворота удерживающей трубки и, таким образом, шарнирно соединено с направляющей и удерживающей трубкой, а другим концом шарнирно соединено с планкой. Планка, направляющая и параллельные звенья образуют ряд параллелограммов. При параллельном перемещении планки можно устанавливать необходимое угловое положение параллельных звеньев относительно направляющей. К планке шарнирно присоединено регулировочное кольцо, имеющее ряд внешних цилиндрических поверхностей. При любом фиксированном положении параллельных звеньев угловое положение каждой удерживающей трубки относительно шарнирно связанного с ней звена определяется угловым положением регулировочного кольца и радиусом цилиндрической поверхности кольца, охватываемой тросиком, связывающим кольцо с удерживающей трубкой и звеном. При повороте кольца удерживающие трубки перьев поворачиваются относительно параллельных звеньев приблизительно на пропорциональные углы. В результате поворота кольца относительно планки можно увеличить или уменьшить площадь крыла и, следовательно, изменить величину подъемной силы. При фиксированном угловом положении кольца можно, сместив планку, изменить угловое положение параллельных звеньев на некоторый угол, а вместе с ними изменить положение удерживающих трубок перьев примерно на тот же угол. В результате можно переместить вдоль оси фюзеляжа точку приложения подъемной силы.
Чтобы обеспечить возможность складывания крыла, стержень каждого пера посажен на удерживающую трубку этого пера с возможностью поворота вокруг этой трубки. Стержни всех перьев крыла связаны тросиком с приводным валиком, при повороте которого можно одновременно повернуть каждое перо вокруг удерживающей трубки на один и тот же угол. К валику присоединен фиксатор, позволяющий застопоривать его положение относительно направляющей. Складывание крыла может быть произведено путем одновременного поворота каждого пера вокруг удерживающей трубки на необходимый угол и последующего поворота всех удерживающих трубок перьев до поджатия их к хвостовой части фюзеляжа, используя для этого механизм одновременного поворота удерживающих трубок.
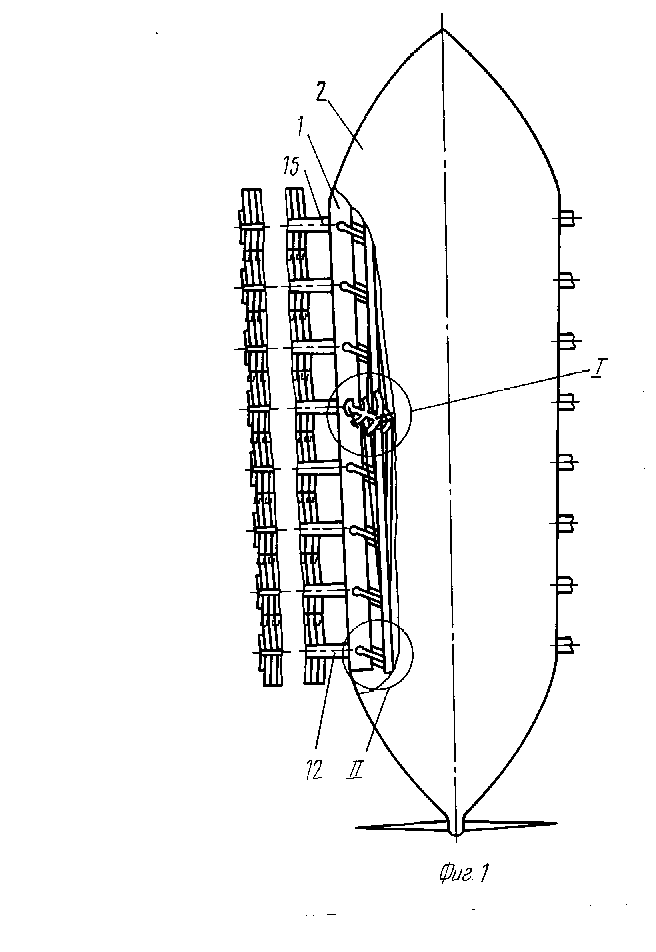
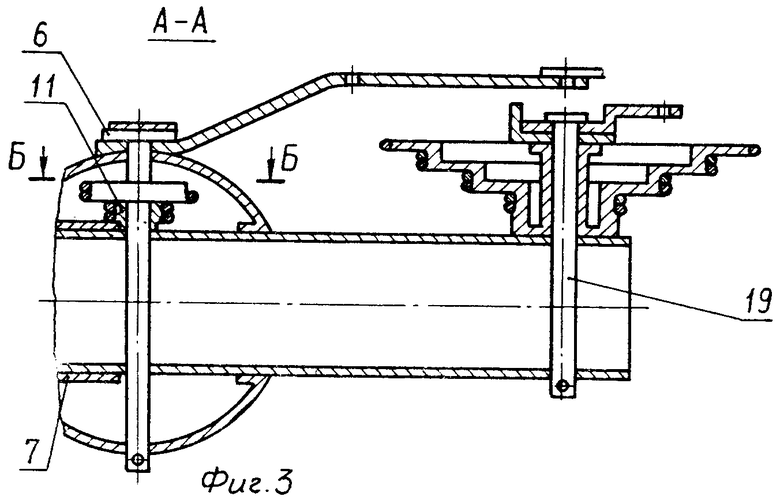
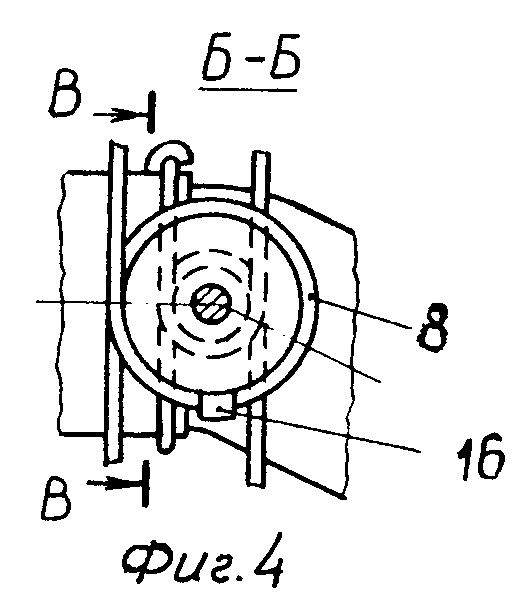
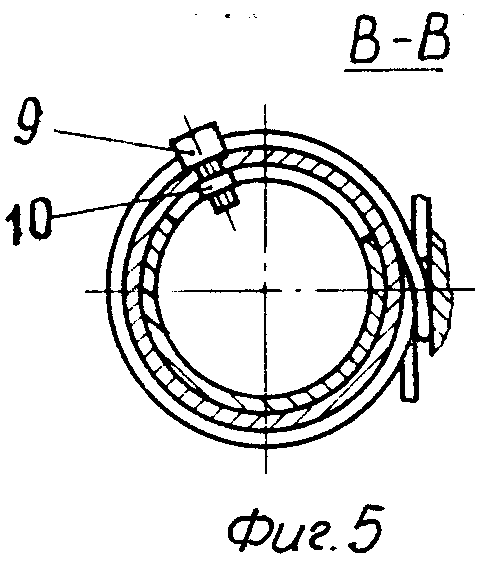
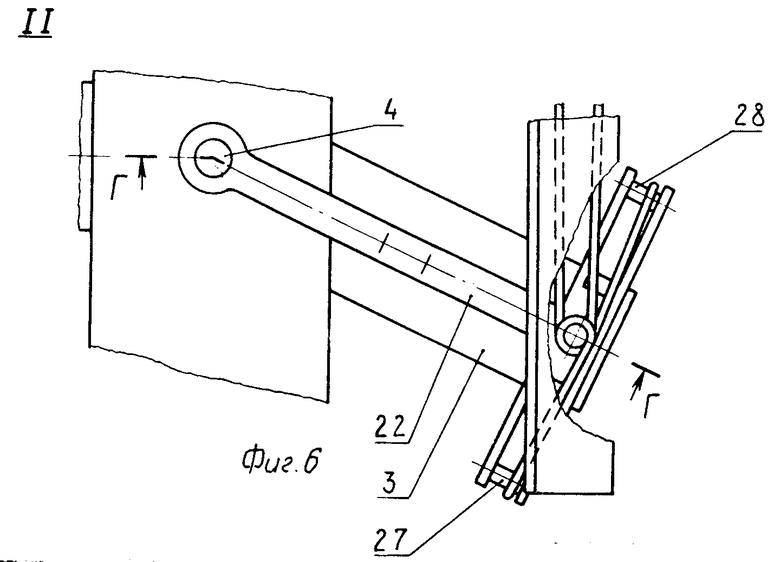
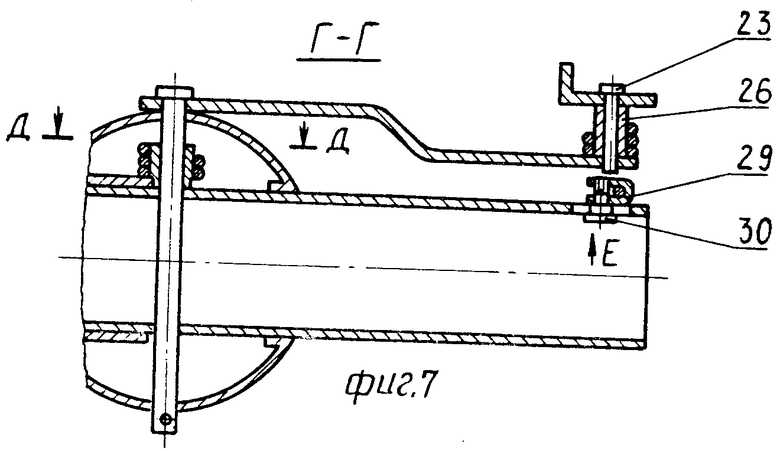
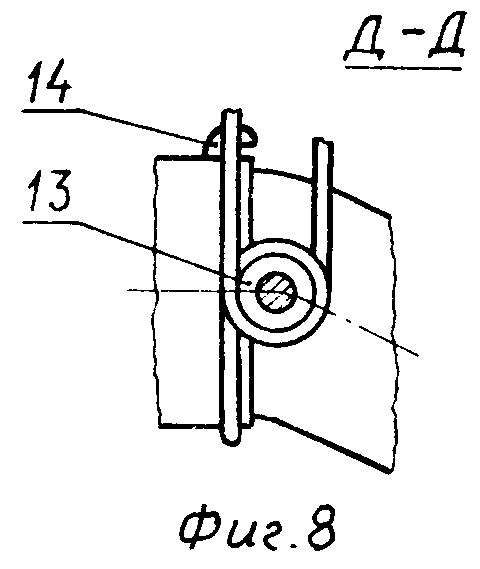
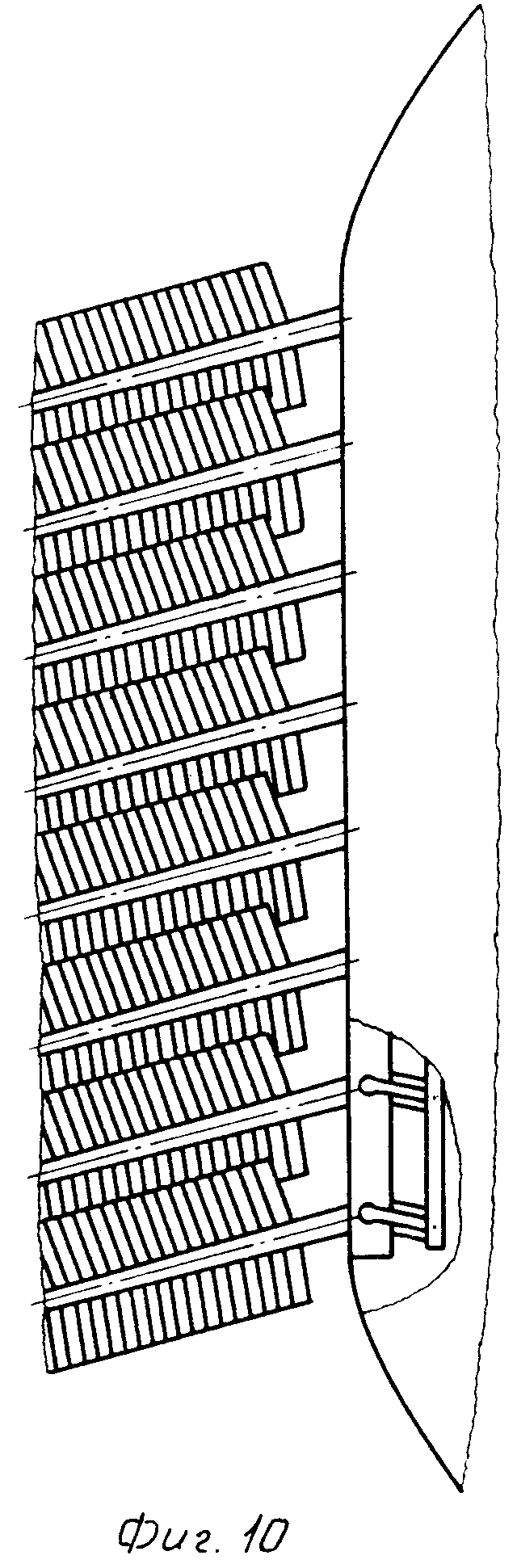
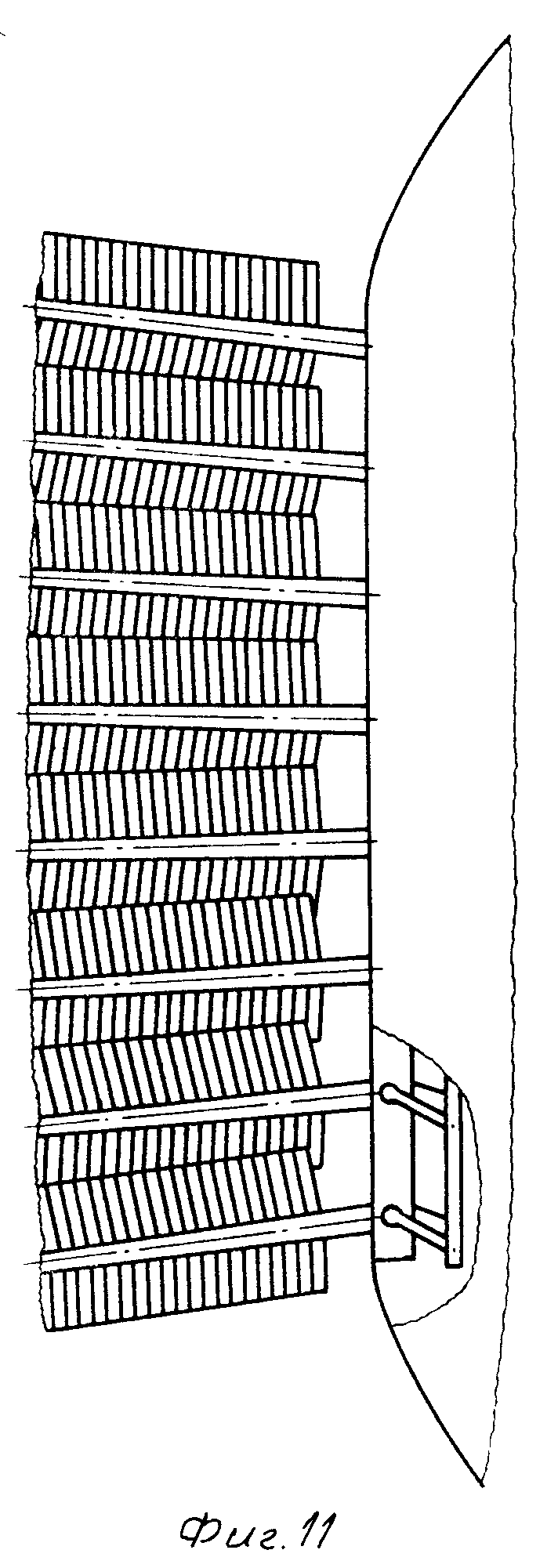
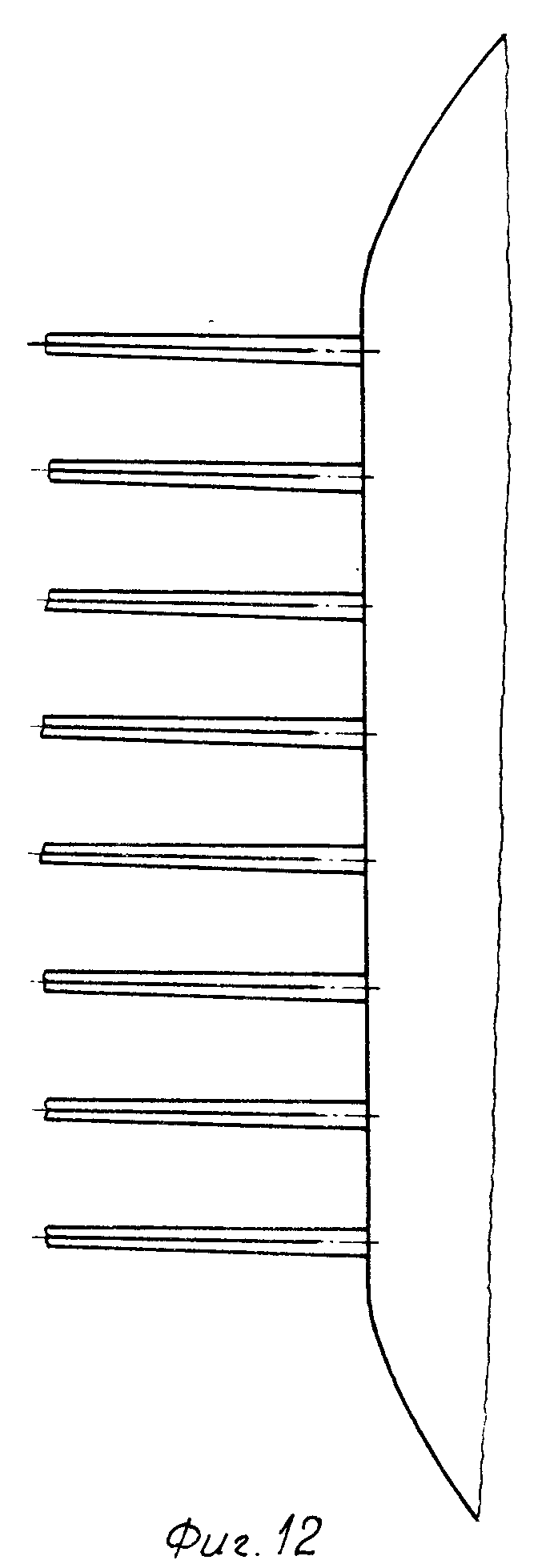
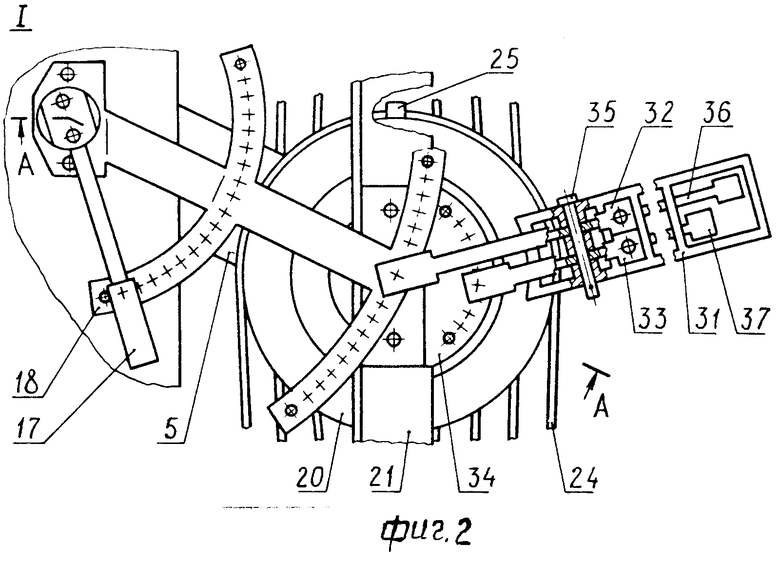
На фиг. 1 изображена предлагаемая конструкция, общий вид, основными составляющими которой являются: фюзеляж, двигатель (например, поршневой с винтом) регулируемой тяги, два аналогичных механизма управления перьями крыла; на фиг. 2 показаны основные элементы механизма управления перьями; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - сечение В-В на фиг. 4; на фиг. 6 - связи пера; на фиг. 7 - сечение Г-Г на фиг. 6; на фиг. 8 - сечение Д-Д на фиг. 7; на фиг. 9 - вид по стрелке Е на фиг. 7; на фиг. 10 и 11 - примерные формы крыла в плане после одновременного поворота удерживающих трубок перьев; на фиг. 12 - примерный вид крыла в плане после одновременного поворота каждого пера вокруг удерживающей трубки.
Механизм управления перьями содержит направляющую 1, неподвижно закрепленную на фюзеляже 2. Направляющая имеет две параллельные плоскости. Удерживающая трубка каждого пера соединена с направляющей шарнирно при помощи оси, перпендикулярной плоскостям направляющей. В частности, удерживающая трубка 3 шарнирно связана с направляющей 1 при помощи оси 4, пересекающей эту трубку, а удерживающая трубка 5 соединена с направляющей 1 при помощи валика 6. Параллельные плоскости направляющей ограничивают с двух сторон перемещение любой удерживающей трубки вдоль оси поворота, например, ограничивают перемещение удерживающей трубки 3 вдоль оси 4. Каждая удерживающая трубка одинаковым образом связана с пером. Например, удерживающая трубка 5 на конце охватывается стержнем пера 7, причем к внешней поверхности стержня прижат тросик 8, для чего использован зажим 9, конец которого с зажимной гайкой 10 входит в поперечную прорезь удерживающей трубки, препятствуя перемещению стержня относительно трубки в осевом направлении. Тросик 8 предназначен для передачи усилия с валика 6 к стержню любого пера при необходимости поворота пера относительно удерживающей трубки. Все перья последовательно обвязаны этим тросиком аналогичным образом. В частности, перо 7 обвязано так: тросик, подводимый к этому перу, частично охватывает ролик 11, свободно сидящий на валике 6, затем полностью охватывает стержень этого пера (с закреплением), затем вновь частично охватывает ролик и далее протягивается к следующему перу. Любое другое перо обвязано аналогично с тем изменением, что охватываемый ролик сидит не на валике, а на оси. Например, у пера 12 тросиком охватывается ролик 13, свободно сидящий на оси 4, затем охватывается стержень пера с закреплением при помощи зажима 14, затем вновь охватывается ролик. От переднего пера 15 тросик протягивается к валику 6, охватывая его, и далее - к заднему перу 12. Концы тросика закреплены на валике 6 зажимом 16. На конце валика укреплен упругий фиксатор 17, палец которого может застопоривать валик, входя в одно из отверстий стопора 18, неподвижно соединенного с направляющей.
Через конец удерживающей трубки 5 пропущена ось 19, на которую свободно посажены кольцо 20 и планка 21. Кольцо имеет ряд внешних цилиндрических поверхностей, каждая из которых охватывается тросиком, связывающим это кольцо с удерживающей трубкой одного из перьев. Такая связь осуществляется аналогичным образом для любого пера, кроме пера 7, которое назовем базовым. В частности, с пером 12 кольцо связано так.
На ось 4 подвижно посажено звено 22, шарнирно связанное с планкой 21 при помощи оси 23, причем звено 22, планка 21, удерживающая трубка 5 и направляющая образуют параллелограммный механизм. Тросик 24, концы которого закреплены на кольце 20 зажимом 25, на пути от одного своего конца к другому последовательно охватывает: кольцо 20, ролик 26, свободно сидящий на оси 23, ролики 27 и 28, подвижно соединенные со звеном 22, вновь ролик 26 и кольцо 20. Тросик 24 на участке между роликами 27 и 28 сжат зажимом 29 с помощью винта 30, который соединен с удерживающий трубкой 3 так, что имеет возможность смещаться вдоль оси трубки в продольной направляющей прорези этой трубки.
С кольцом 20 жестко связана рукоятка 31, на которой укреплены два упругих фиксатора 32 и 33. На конце фиксатора 32 имеется палец, который может западать в одно из отверстий стопора 18 и при этом застопоривать удерживающую трубку 5 (базового пера); ось каждого такого отверстия задана одним из положений оси 19. На конце фиксатора 33 имеется палец, который может западать в одно из отверстий стопора 34 и при этом жестко связывать кольцо 20 с планкой 21, на которой укреплен этот стопор.
Рукоятка 31 снабжена осью 35, на которую подвижно посажены рычаги 36 и 37. Рычагом 36 можно приподнимать конец фиксатора 32, отстопоривая удерживающую трубку 5, а рычагом 37 можно поднимать конец фиксатора 33, отстопоривая кольцо 20.
Механизм управления перьями работает следующим образом. Удерживающая трубка 5 базового пера 7 все время остается параллельной любому звену типа звена 22, так как она соединена с таким звеном, направляющей 1 и планкой 21 в параллелограммный механизм. Угловое положение каждой удерживающей трубки относительно шарнирно связанного с ней звена, например угловое положение удерживающей трубки 3 относительно шарнирно связанного с ней звена 22, определяется угловым положением регулировочного кольца 20 относительно планки 21, поскольку эта удерживающая трубка, звено и кольцо соединены передачей гибкой связью. Для удерживающей трубки 3 и звена 22 гибкая связь с кольцом 20 осуществляется при помощи тросика 24. Если кольцо поворачивается относительно планки на некоторый угол, то перемещается тросик 24 и, в частности, та его точка, около которой он соединен с удерживающей трубкой 3 при помощи зажима 29 и винта 30. Перемещение этой точки тросика вызывает перемещение винта 30, который, скользя в продольной направляющей прорези трубки 3, заставляет эту трубку поворачиваться относительно звена 22. Угол поворота удерживающей трубки 3 приблизительно пропорционален длине участка перемещения указанной точки тросика, а длина такого участка определяется произведением угла поворота кольца 20 на радиус цилиндрической поверхности кольца, охватываемой тросиком 24.
Удерживающая трубка каждого пера, за исключением удерживающей трубки 5 базового пера 7, связана с кольцом 20 при помощи отдельного тросика, охватывающего на кольце одну из цилиндрических поверхностей. Таким образом, если кольцо 20 поворачивается относительно планки 21 на некоторый угол, то удерживающие трубки всех перьев, кроме базового пера, поворачиваются относительно трубки 5 базового пера на углы, примерно пропорциональные радиусам соответствующих этим перьям цилиндрических поверхностей кольца 20.
Управление движением самолета осуществляется путем поворота удерживающих трубок перьев по любому из двух вариантов, в первом из которых каждое перо поворачивается приблизительно на один и тот же выбранный угол, во втором - базовое перо 7 не перемещается, а все остальные перья поворачиваются приблизительно на пропорциональные углы.
Первый вариант поворота осуществляется при фиксированном положении кольца 20 относительно планки 21, для чего палец фиксатора 33, управляемого при помощи рычага 37, должен входить в одно из отверстий стопора 34. Поворот осуществляется в результате следующих операций: 1) перемещения рычага 36 до отстопоривания удерживающей трубки 5 базового пера 7, 2) перемещения рукоятки 31, вызывающего параллельный сдвиг планки 21 и поворот на требуемый угол удерживающей трубки 5 и звеньев типа звена 22, вместе с которыми поворачиваются удерживающие трубки других перьев. При таком варианте поворота возникает незначительное отличие углов поворота удерживающих трубок, например, немного отличаются углы поворота трубок 3 и 5, что связано с незначительным изменением относительного углового положения звена 22 и трубки 3, вследствие слабого смещения этого звена относительно точки соединения тросика 24 с трубкой 3. Это смещение определяется произведением угла поворота звена 22 на радиус цилиндрической поверхности ролика 26, охватываемой тросиком 24, и тем меньше, чем меньше радиус этой поверхности.
Первый вариант поворота удерживающих трубок позволяет придать крылу вид, изображенный на фиг. 4, если до этого оно имело вид, изображенный на фиг. 1. Такой вариант поворота приводит к смещению вдоль оси фюзеляжа точки приложения подъемной силы и, следовательно, позволяет изменять момент тангажа.
Второй вариант поворота осуществляется при фиксированном положении удерживающей трубки 5, планки 21 и звеньев типа звена 22, для чего палец фиксатора 32, управляемого при помощи рычага 36, должен входить в одно из отверстий стопора 18. Для поворота выполняются операции: 1) перемещения рычага 37 до выхода пальца фиксатора 33 из отверстия стопора 34, что приводит к отстопориванию кольца 20, 2) поворота рукоятки 31 вместе с кольцом 20 на требуемый угол.
Второй вариант поворота позволяет придать крылу вид, изображенный на фиг. 5, если до этого оно имело вид, изображенный на фиг. 1. При этом изменяется площадь крыла и подъемная сила крыла, а если другое крыло не преобразовывалось аналогичным образом, то изменяется и момент крена.
Механизм управления перьями позволяет, кроме того, одновременно одинаково изменять угловое положение каждого пера относительно своей удерживающей трубки в результате выполнения следующих операций: 1) подъема упругого фиксатора 17 до выхода пальца фиксатора из отверстия стопора 18, вследствие чего отстопоривается валик 6, 2) поворота этого фиксатора, а вместе с ним и валика 6, на требуемый угол, 3) застопоривания валика 6. В результате поворота валика 6 на угол близкий к π/2 можно придать крылу вид, изображенный на фиг. 6, если до этого оно имело вид, изображенный на фиг. 1. Использовав затем механизм поворота удерживающих трубок перьев, можно сместить все перья к хвостовой части фюзеляжа, придав крылу компактный вид. (56) Авторское свидетельство СССР N 187533, кл. B 64 C 33/02, 1964.
Изобретение относится к авиационной технике. Легкий самолет содержит жесткие крылья, включающие в себя ряды перьев, и прикрепленную к фюзеляжу 2 направляющую 1 с закрепленными удерживающими трубками перьев 12 крыла, при этом с направляющей 1 и с удерживающими трубками перьев 12 соединен механизм, предназначенный для одновременного поворота этих трубок вместе с перьями 12. Каждое перо 12 выполнено в виде стержня кольцевого сечения с присоединенными к нему консольными балками, оси которых принадлежат одной поверхности. Направляющая 1 крыла шарнирно соединена с удерживающими трубками перьев 12 крыла и имеет параллельные плоскости для скольжения удерживающих трубок вместе с насаженными на них перьями 12 при повороте. Механизм одновременного поворота этих трубок вместе с перьями 12 выполнен с возможностью поворота удерживающих трубок либо на приблизительно одинаковый угол, либо на разные, приблизительно пропорциональные углы. Механизм одновременного поворота удерживающих трубок снабжен однотипными звеньями, каждое из которых одним концом свободно насажено на ось поворота удерживающей трубки, а другим шарнирно соединено с планкой, при параллельном перемещении которой можно устанавливать необходимое угловое положение параллельных звеньев. Угловое положение удерживающей трубки относительно шарнирно связанного с ней звена определяется угловым положением регулировочного кольца, с которым звено и трубка соединены гибкой связью и которое шарнирно присоединено к планке. Стержень каждого пера 12 насажен на удерживающую трубку с возможностью поворота около этой трубки, и все стержни перьев 12 одного крыла связаны тросиком с приводным валиком с возможностью обеспечения одновременного одинакового поворота перьев 12 вокруг трубок, а к валику прикреплен фиксатор, позволяющий застопоривать его положение. Изобретение позволяет снизить вес крыла самолета при известных основных геометрических характеристиках крыла и заданном запасе прочности, а также обеспечивает возможность управления путем изменения формы крыла в плане и обеспечивает возможность складывания крыла. 3 з. п. ф-лы, 12 ил.