Изобретение относится к способам и устройствам, обеспечивающим вертикальную посадку беспилотных летательных аппаратов с помощью парашютных систем.
Известен беспилотный самолет, легкосборная конструкция которого в процессе приземления распадается на части от ударных нагрузок для предохранения от разрушений (патент США №7237750, В64С 1/00, 2007.07.03). Конструкция узлов соединения частей БЛА предусматривает при распаде амортизацию энергии ударов приземления.
Основным недостатком такой технологии посадки беспилотного самолета является то, что при планировании вблизи, как правило, загроможденной поверхности земли невозможно обеспечить стабильность глиссады планирования и динамических параметров БЛА вследствие повышенной турбулентности приземных слоев атмосферы. Поэтому невозможно предусмотреть динамику ударных нагрузок, которые, к тому же, имеют сосредоточенный характер, что неизбежно приводит к разрушению крыльевых конструкций БЛА. Именно поэтому данная технология посадки БЛА из-за ненадежности не получила распространения и применяется динамически более стабильная парашютная посадка.
Известен способ парашютной посадки БЛА с устройством освобождения парашюта от БЛА при приземлении (патент США №8191831, B64D 17/00, B64D 17/54, 2012.06.05). При выпуске с БЛА и раскрытии парашюта под ним раскрывают и надувают пневмодемпфер, которым амортизируют ударные нагрузки приземления. При приземлении БЛА по команде его системы управления посредством сервопривода открывает замок удерживания соединительного узла подвесной системы БЛА, вследствие чего он отделяется от приземлившегося БЛА и складывает купол, что предотвращает негативное воздействие его парусности.
Основным недостатком такой парашютной посадки БЛА является то, что команда на отделение парашюта от БЛА должна быть выполнена немедленно после приземления БЛА, что может реализовываться или при визуальном контроле оператора, или автоматически от ударного контакта приземления, что противоречит демпфированию полезной нагрузки БЛА и очень сложно реализовать. Это существенно усложняет конструкцию и эксплуатацию соответственно необходимостью обязательной посадки вблизи оператора, что возможно не часто, да и вообще проблематично в ветер. Или необходимо оборудовать БЛА автоматической сенсорной системой срабатывания отделения парашюта от удара приземления. Все это снижает надежность и ограничивает эксплуатационные возможности БЛА.
Наиболее близким аналогом (прототипом) предлагаемого изобретения является технология и система парашютной посадки беспилотного летательного аппарата (патент РФ №2456211, B64D 17/80, 2012.07.20), в соответствии с которыми поворотные консоли крыла БЛА закреплены на его центроплане посредством шарниров и замков-фиксаторов. В полетном положении консоли крыла фиксируются замками-фиксаторами, которые приводятся в движение редуктором исполнительного привода системы управления БЛА. Консоли крыла при раскрытии купола парашюта шарнирно перемещаются вместе с куполом вверх, при этом их трехстепенные шарниры обеспечивают плавное перемещение купола. Посадка БЛА с консолями, сложенными в вертикальной плоскости, должна выполнить функцию подвесной системы и помочь избежать их повреждения в сильный ветер, когда большая парусность парашюта может привести к перевороту и ударам БЛА.
Основным недостатком данного устройства является то, что БЛА даже со сложенными консолями под действием парусности парашюта может волочиться по площадке приземления с поперечным движению положением фюзеляжа с хвостовым оперением, вследствие чего могут быть повреждены все его части, включая полезную нагрузку. К тому же приземление происходит на нижнюю поверхность фюзеляжа БЛА, где расположена его полезная нагрузка, которую в такой компоновке необходимо или демпфировать при приземлении специальным дополнительным устройством, или минимизировать вертикальную скорость снижения увеличением площади купола парашюта, что неизбежно увеличит его парусность. Механика укладывания парашютной системы в крыле вдоль его размаха существенно усложняет и ослабляет конструкцию крыла такого БЛА. При этом механизм складывания консолей крыла в такой кинематике сложен и снижает надежность БЛА в полете, т.к. требует отсутствия люфтов в осях поворота, а сервоприводы должны преодолевать большие усилия. В случае отказа авионики или их электромеханики в полете неизбежна катастрофа БЛА, что усложняет его эксплуатацию.
Целью настоящего изобретения является обеспечение высоконадежной эффективной технологии парашютной посадки беспилотного самолета.
Поставленная цель достигается тем, что в способе посадки беспилотного самолета, включающем выпуск с него и раскрытие посадочного парашюта, расфиксацию шарнирных узлов стыковки консолей крыла к центроплану, поворот консолей относительно параллельной хорде крыла оси и их шарнирное складывание, снижение самолета под его подвесной системой с помощью парашюта и предохранение самолета от парусности парашюта при приземлении при раскрытии посадочного парашюта самолет переворачивают и производят снижение верхней поверхностью вниз, приземляют его по меньшей мере на одну из законцовок консолей крыла и амортизируют энергию удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку, отделяют консоль от самолета, при этом от его подвесной системы отсоединяют парашют или часть его строп.
При переворачивании самолета на законцовках крыла могут быть шарнирно разложены вниз снабженные шипами опоры, на которые приземляют самолет и с помощью которых производят якорение законцовок на поверхности приземления, посадочную энергию удара амортизируют работой на сдвиг одноразовых элементов фиксации шарнирных узлов консолей, которые расфиксируют срезом этих элементов, при этом в полете сложенные опоры используют в качестве аэродинамических шайб крыла, при ударном вбивании их шипов в поверхность приземления частично амортизируют энергию удара, консоли крыла отделяют от самолета на привязи гибких тяг, при вытягивании по меньшей мере одной из которых открывают замок отсоединения парашюта или части его строп от подвесной системы.
После раскрытия парашюта с помощью подвесной системы самолет может быть подвешен с наклонным к горизонту положением продольной оси крыла и его приземляют на нижнюю законцовку крыла, отделяют консоль от самолета на привязи гибкой тяги, вытягиванием которой открывают замок отсоединения парашюта или части его строп от подвесной системы, при этом гибкую тягу вытягивают при помощи центробежного усилия в процессе рычажного опрокидывания крыла при приземлении.
При переворачивании самолета из нижней законцовки крыла может быть шарнирно выдвинут вниз снабженный шипом штырек, которым производят якорение законцовки при приземлении самолета и при вбивании шипа в поверхность приземления частично амортизируют посадочную энергию удара, основную часть которой амортизируют работой на сдвиг и срез одноразового элемента фиксации шарнирного узла.
Гибкая тяга может быть пропущена подвижно сквозь консоль крыла вдоль ее размаха и через направляющее отверстие установленного на законцовке зажима, на который приземляют самолет, при этом от ударной нагрузки на зажим с его помощью фиксируют тягу на консоли перед ее вытягиванием.
Замок отсоединения парашюта или части его строп от подвесной системы может быть открыт посредством электромеханического привода, который включают отделением консоли крыла при приземлении самолета.
Посадочная энергия удара может быть амортизирована работой на разрыв одноразовых элементов фиксации шарнирных узлов, которые расфиксируют разрывом этих элементов.
Предлагаемый способ парашютной посадки беспилотного самолета иллюстрируется чертежами, на которых изображены:
на фиг. 1а - схема варианта конструкции беспилотного самолета с законцовками крыла без вертикального оперения;
на фиг. 1в - схема варианта парашютной посадки беспилотного самолета с наклонным к горизонту положением продольной оси крыла;
на фиг. 1с - схема динамики раскрытия парашюта с переворачиванием беспилотного самолета;
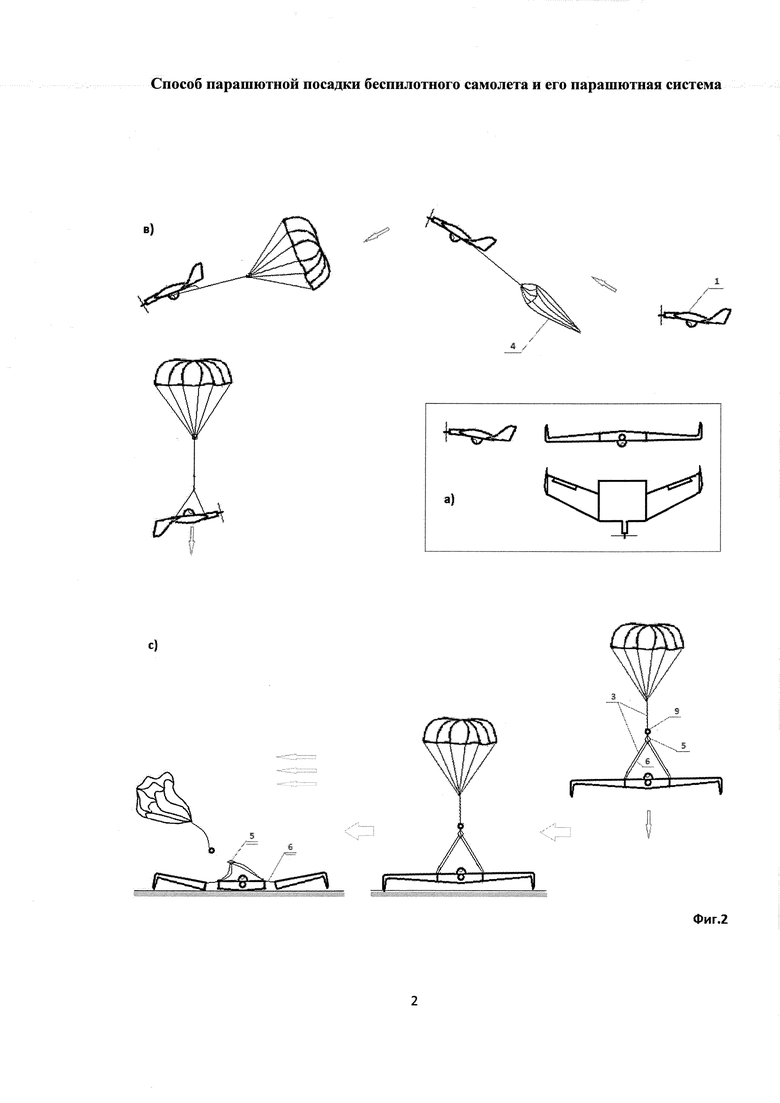
на фиг. 2а - схема варианта конструкции беспилотного самолета с оборудованными вертикальным оперением законцовками крыла;
на фиг. 2в - схема динамики раскрытия парашюта с переворачиванием беспилотного самолета с оборудованными вертикальным оперением законцовками крыла;
на фиг. 2с - схема парашютной посадки беспилотного самолета с оборудованными вертикальным оперением законцовками крыла и с отсоединением строп парашюта;
на фиг. 3а - схема варианта парашютной посадки беспилотного самолета с наклонным к горизонту положением продольной оси крыла, с законцовками крыла без вертикального оперения и с отсоединением строп парашюта посредством чекового замка;
на фиг. 3в - схема варианта парашютной посадки беспилотного самолета с наклонным к горизонту положением продольной оси крыла, со снабженной штырьком якорения законцовкой крыла и с отсоединением части строп парашюта посредством чекового замка;
на фиг. 4а - схема варианта парашютной посадки на склон холма беспилотного самолета с оборудованными вертикальным оперением законцовками крыла и с отсоединением строп парашюта;
на фиг. 4в - схема варианта парашютной посадки на склон холма беспилотного самолета со снабженными отклоняемыми опорами законцовками крыла и с отсоединением строп парашюта;
на фиг. 7а - схема динамики раскладывания снабженного шипом штырька при переворачивании беспилотного самолета;
на фиг. 7в - схема динамики раскладывания снабженных шипами опор при переворачивании беспилотного самолета;
Предложенный способ парашютной посадки беспилотного самолета реализуется следующим образом. По команде на посадку с летящего беспилотного самолета 1 выпускают и раскрывают парашют 4, который вытягивает соединенную с нижней поверхностью самолета его подвесную систему 3 (фиг. 1а и фиг. 1с). С помощью связки парашюта 4 и подвесной системы 3 с нижней поверхностью самолета на последний воздействует пикирующий момент, он пикирует в привязном режиме и затем переходит в снижение под парашютом в перевернутом положении.
Самолет может быть подвешен под парашютом с наклонным положением к горизонту продольной оси крыла (фиг. 1в), вследствие чего он приземляется на нижнюю законцовку крыла (фиг. 3в), которая при этом воспринимает ударную нагрузку и образует крутящий момент, который консоль крыла 2 подобно рычагу передает на легкоразъемный шарнирный узел ее навески на самолет. В нем посадочную энергию удара амортизируют работой на сдвиг одноразового элемента 12 фиксации шарнирного узла консолей, которые расфиксируют срезом этих элементов (фиг. 8), вследствие чего консоль 2 проворачивает шарнирный узел и отделяется от самолета. При этом благодаря такой динамике импульсного поворота крыла в процессе посадки появляется центробежные усилия на его части, которые способствуют их отдалению друг от друга, вследствие чего консоль вытягивает ее привязную гибкую тягу 6, посредством которой открывается механизм запирания замка 5. Замок отсоединяет кольцо 9 и соединенные с ним стропы парашюта 4, его купол расслабляется, что предохраняет лежащий самолет от возможного воздействия парусности парашюта (фиг. 3а). Причем тяга 6 в любом случае автоматически вытянется при возникновении усилия от парусности парашюта, что гарантирует сохранность самолета.
Беспилотный самолет может приземляться на законцовку, на которую может быть шарнирно установлен маятниковый штырь 10, снабженный шипом (фиг. 3в и фиг. 7а). Приземляющийся самолет ударной нагрузкой вбивает шип в поверхность приземления и этим производит якорение законцовки, при этом замок 5 отсоединяет кольцо 9 и соединенные с ним часть строп парашюта, что также расслабит купол парашюта.
Приземление может осуществляться на законцовки крыла в виде винглетов, или вертикального оперения (фиг. 2с). В таком варианте приземление осуществляется на их концы, вследствие чего посадочная энергия самолета амортизируется работой на разрушение двух одноразовых элементов 12 в шарнирных узлах двух консолей крыла. При этом отделившимися консолями будут вытянуты две тяги 6 замка 5, что будет дублировать отсоединение парашюта или части его строп при посадке.
Приземление может также осуществляться на законцовки консолей крыла с шарнирно установленными на них опорами 11 с возможностью одностороннего маятникового поворота при переворачивании самолета (фиг. 4в и фиг. 7в). При этом опоры снабжены шипами и в полете могут выполнять функции аэродинамических шайб, а при приземлении посадочная энергия самолета также будет амортизироваться работой на разрушение двух одноразовых элементов 12 и будут вытянуты две дублирующие тяги замка 5.
При парашютной посадке самолета на склон холма возможно приземление на одну из законцовок крыла, консоль которой будет амортизировать посадочную энергию самолета в вариантах выполнения законцовок в виде винглетов, вертикального оперения (фиг. 4а) или шарнирно выдвигаемых опор 11 (фиг. 4в), при этом вытянутая тяга 6 откроет замок 5 и отсоединит парашют или часть его строп.
Известен беспилотный летательный аппарат с парашютной системой посадки (патент РФ №2456211, B64D 17/80, 2012.07.20), в соответствии с которым поворотные консоли крыла БЛА закреплены на его центроплане посредством шарниров и замков-фиксаторов. В полетном положении консоли крыла фиксируются замками-фиксаторами, которые приводятся в движение редуктором исполнительного привода системы управления БЛА. Консоли крыла при раскрытии купола парашюта шарнирно перемещаются вместе с куполом вверх, при этом их трехстепенные шарниры обеспечивают плавное перемещение купола. Посадка БЛА с консолями, сложенными в вертикальной плоскости, должна помочь избежать их повреждения в сильный ветер, когда большая парусность парашюта может привести к перевороту и ударам БЛА.
Недостатком устройства прототипа является то, что под действием парусности парашюта БЛА может волочиться по площадке приземления в ветреную погоду даже со сложенными консолями, в результате чего могут быть повреждены полезная нагрузка и другие его части. При такой посадке необходимо или демпфировать приземление, или минимизировать вертикальную скорость снижения увеличением площади купола парашюта, что неизбежно увеличит его парусность и еще больше усугубит эту проблему. При этом кинематика механизма складывания консолей крыла сложна и снижает надежность БЛА в полете, т.к. направление складывания консолей требует отсутствия люфтов в осях поворота, а сервоприводы должны преодолевать большие усилия. Также устройство укладывания парашютной системы в крыле вдоль его размаха существенно усложняет конструкцию крыла и БЛА, что снижает его надежность.
Целью настоящего изобретения является повышение надежности системы парашютной посадки для беспилотного самолета.
Поставленная цель достигается тем, что в беспилотном самолете с парашютной системой посадки, содержащем парашют со стропами и подвесной системой для самолета, две консоли его крыла, стыкуемые с самолетом посредством фиксируемых шарнирных узлов с возможностью поворота относительно параллельной хорде крыла оси и шарнирного складывания консолей при их расфиксации шарнирные узлы стыковки консолей крыла с самолетом выполнены легкоразъемными при разрушении одноразовых элементов их фиксации от нагрузки момента поворота консолей в сторону нижней поверхности самолета, к которой прикреплена подвесная система парашюта, на которой установлен замок отсоединения от нее строп парашюта или их части, консоли снабжены гибкими тягами, при этом гибкая тяга по меньшей мере одной консоли крыла соединяет ее с узлом запирания замка.
На законцовки консолей крыла беспилотного самолета могут быть шарнирно установлены опоры с шипами, выполненные в виде аэродинамических шайб с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета с фиксацией их крайнего положения.
Замок отсоединения парашюта или части его строп от подвесной системы самолета может быть выполнен в виде установленного на подвесной системе четырехзвенного шарнирного механизма, два сочлененных звена которого образуют клещевидный узел запирания кольца, а два других сочлененных звена образуют двухпозиционный распорный узел управления закрытием и раскрытием запорного узла, замок снабжен двумя гибкими тягами открытия его узла запирания, при этом гибкие тяги замка соединяют его узел запирания с консолями крыла, а кольцо соединено со стропами парашюта или их частью.
Замок отсоединения парашюта или части его строп от подвесной системы самолета может быть выполнен также в виде установленного на подвесной системе чекового механизма запирания кольца, замок снабжен двумя гибкими тягами открытия его узла запирания, при этом гибкие тяги замка соединяют чеку с консолями крыла, а кольцо соединено со стропами парашюта или их частью.
Подвесная система беспилотного самолета может быть выполнена с наклонным к горизонту положением продольной оси крыла при маятниковом подвесе на ней самолета.
На законцовки крыла самолета может быть шарнирно установлен по меньшей мере один снабженный шипом штырек, выполненный с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета.
Штырек, или опора в выдвинутом положении могут быть выполнены вертикально подвижными до упора с вхождением их тыльного торца в выемку установленного напротив подпятника, по меньшей мере одна гибкая тяга проходит подвижно через направляющее отверстие в торце консоли крыла, вдоль внутри нее и между выемкой подпятника и тыльным торцем штырька, или опоры, при этом гибкая тяга одним концом соединена с узлом запирания замка отсоединения парашюта или части его строп от подвесной системы самолета.
Предлагаемая система парашютной посадки беспилотного самолета иллюстрируется чертежами, на которых изображены:
на фиг. 1а - схема варианта конструкции беспилотного самолета с законцовками крыла без вертикального оперения;
на фиг. 1в - схема варианта парашютной посадки беспилотного самолета с наклонным к горизонту положением продольной оси крыла;
на фиг. 1с, фиг. 2, фиг. 3 и фиг. 4 - схемы динамики работы парашютной системы беспилотного самолета с различными вариантами конструкций законцовок крыла;
на фиг. 5 и фиг. 6 - схемы вариантов конструкций и работы замка отсоединения парашюта или части его строп;
на фиг. 7 - схемы вариантов конструкций и работы раскладных законцовок крыла;
на фиг. 8а - схема конструкции и работы шарнирных узлов навески консолей крыла на самолет;
на фиг. 8в - схема работы шарнирных узлов навески консолей по амортизации энергии при парашютной посадке беспилотного самолета.
Парашютная система посадки беспилотного самолета 1 содержит парашют 4 со стропами и подвесной системой 3 для самолета, две консоли 2 его крыла (фиг. 1в), стыкуемые с самолетом посредством фиксируемых шарнирных узлов 13 с возможностью поворота относительно оси, параллельной хорде крыла (фиг. 1а). Шарнирные узлы 13 выполнены легкоразъемными при разрушении одноразовых элементов 12 их фиксации от нагрузки момента поворота консолей в сторону нижней поверхности самолета при приземлении его в перевернутом положении (фиг. 1с). К нижней поверхности самолета прикреплена подвесная система 3, на которой установлен замок 5 отсоединения от нее строп парашюта или их части. Консоли 2 снабжены гибкими тягами 6, по меньшей мере одна из которых соединяет консоль с узлом запирания замка.
Подвесная система 3 самолета может быть выполнена с наклонным к горизонту положением продольной оси крыла при подвесе на ней самолета под парашютом (фиг. 3).
На законцовки консолей 2 крыла могут быть шарнирно установлен по меньшей мере один снабженный шипом штырек 10, выполненный с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета (фиг. 7а).
На законцовки консолей могут быть шарнирно установлены опоры 11 с шипами, выполненные в виде аэродинамических шайб с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета (фиг. 7в).
Замок отсоединения парашюта или части его строп от подвесной системы самолета может быть выполнен в виде установленного на подвесной системе четырехзвенного шарнирного механизма, два сочлененных звена которого образуют клещевидный захват 5 запирания кольца 9, соединенного со стропами парашюта или их частью (фиг. 5 и фиг. 6). Два других шарнирно сочлененных звена образуют узел запирания 7 в виде двухпозиционной распорки закрытия и раскрытия захвата, с которой консоли крыла соединены посредством гибких тяг 6.
Замок освобождения парашюта может быть также выполнен в виде установленного на подвесной системе 3 чекового механизма, узел запирания которого выполнен в виде чеки 8, пронизывающей кольцо 9 парашютной системы с возможностью выдергивания с помощью гибких тяг 6, соединяющих чеку 8 с консолями крыла (фиг. 3).
Предложенная система парашютной посадки беспилотного самолета работает следующим образом. Перед взлетом производят сборку самолета 1 путем навески на него консолей 2 путем стыковки зацеплением с проворотом частей легкоразъемных шарнирных узлов 13 (фиг. 8а). Завешает навеску консолей фиксация их шарнирных узлов путем вставления одноразовых элементов 12 в соосные отверстия ответных проушин самолета и консолей. При заходе на посадку над заданном местом с летящего беспилотного самолета выпускают и раскрывают парашют 4, который вытягивает соединенную с нижней поверхностью самолета его подвесную систему 3 (фиг. 1а и фиг. 1с). Благодаря соединению подвесной системы 3 с нижней поверхностью самолета он пикирует в привязном режиме и затем переходит в снижение под парашютом в перевернутом положении.
В варианте подвешивания самолета под парашютом с наклонным положением к горизонту продольной оси крыла (фиг. 1в) он приземляется на нижнюю законцовку крыла (фиг. 3в), которая при этом воспринимает ударную нагрузку и образует крутящий момент, который консоль крыла 2 подобно рычагу передает на легкоразъемный шарнирный узел ее навески на самолет. В нем посадочную энергию удара амортизируют работой на сдвиг одноразового элемента 12 фиксации шарнирного узла консолей, которые расфиксируют срезом этих элементов (фиг. 8), вследствие чего консоль 2 проворачивает шарнирный узел и отделяется от самолета. При этом благодаря такой динамике импульсного поворота крыла в процессе посадки появляется центробежные усилия на его части, которые способствуют их отдалению друг от друга, вследствие чего консоль вытягивает ее привязную гибкую тягу 6, посредством которой открывается механизм запирания замка 5. Замок отсоединяет кольцо 9 и соединенные с ним стропы парашюта 4, его купол расслабляется, что предохраняет лежащий самолет от возможного воздействия парусности парашюта (фиг. 3а). Причем тяга 6 в любом случае автоматически вытянется при возникновении усилия от парусности парашюта, что гарантирует сохранность самолета.
В варианте законцовки с шарнирно установленным маятниковым штырем 10, оборудованным шипом, самолет приземляется на штырь, ударной нагрузкой вбивает шип в поверхность приземления и этим производит якорение законцовки (фиг. 3в и фиг. 7а), при этом замок 5 отсоединяет кольцо 9 и соединенные с ним часть строп парашюта, что также расслабит купол парашюта.
Для варианта исполнения законцовок крыла беспилотного самолета в виде винглетов, или вертикального оперения (фиг. 2с) приземление осуществляется на их концы, вследствие чего посадочная энергия самолета амортизируется работой на разрушение двух одноразовых элементов 12 в шарнирных узлах двух консолей крыла. При этом отделившимися консолями будут вытянуты две тяги 6 замка 5, что будет дублировать отсоединение парашюта или части его строп при посадке.
Приземление может осуществляться на законцовки консолей крыла с шарнирно установленными на них опорами 11 с возможностью одностороннего маятникового поворота при переворачивании самолета (фиг. 4в и фиг. 7в). При этом опоры снабжены шипами и в полете могут выполнять функции аэродинамических шайб, а при приземлении посадочная энергия самолета также будет амортизироваться работой на разрушение двух одноразовых элементов 12 и будут вытянуты две дублирующие тяги замка 5.
При парашютной посадке самолета на склон холма возможно приземление на одну из законцовок крыла, консоль которой будет амортизировать посадочную энергию самолета в вариантах выполнения законцовок в виде винглетов, вертикального оперения (фиг. 4а) или шарнирно выдвигаемых опор 11 (фиг. 4в), при этом вытянутая тяга 6 откроет замок 5 и отсоединит парашют или часть его строп.
Штырек 10 или опора 11 в выдвинутом положении могут быть выполнены вертикально подвижными вдоль своего паза до упора их тыльного торца с вхождением в выемку подпятника 14 (фиг. 9), установленного на законцовку консоли напротив тыльного торца. В этом варианте гибкая тяга 6 проходит подвижно через направляющее отверстие в торце консоли крыла, внутри консоли вдоль нее и выходит между выемкой подпятника и тыльным торцем штырька или опоры. При этом один конец гибкой тяги соединен с узлом запирания замка 5 отсоединения парашюта или части его строп от подвесной системы самолета, а другой конец свободен. При приземлении самолета на штырьки или опоры они от ударной нагрузки своими тыльными торцами войдут в выемки подпятников 14, при этом произойдет зажим заклиниванием гибких тяг 6. В результате они будут зафиксированы на консолях 2 крыла и при их отделении вытянут тяги, которые откроют замок 5 и освободят парашют или часть его строп (фиг. 3-5). Таким образом срабатывание освобождения самолета от парашюта будет происходить только при посадочном ударе законцовки крыла и парашютная система беспилотного самолета будет предохранена от случайного отсоединения раскрытого парашюта при, например, непредвиденном отделении консоли крыла в воздухе от большой положительной перегрузки.
Одной из основных концепций предлагаемой технологии парашютной посадки является амортизация кинетической энергии вертикально снижающегося самолета, причем с обеспечением максимальной энергоемкости при минимальном весе механизма поглощения энергии, т.к. именно работа разрушения материала поглощает максимально возможную энергию. При этом одноразовые элементы шарнирных узлов навески консолей крыла одновременно выполняют роль фиксаторов легкосъемных узлов сборки крыла самолета, что упрощает конструкцию и эксплуатацию самолета.
Приземление самолета на специально предназначенные для этого простые конструктивные элементы с минимальным добавлением веса надежно предохраняют от ударных нагрузок другие части самолета, особенно полезную нагрузку.
Потенциал энергоемкости предлагаемой технологии парашютной посадки позволяет без риска увеличить скорость снижения, что соответственно снижает влияние сноса ветром и повышает точность приземления. Это позволяет в перспективе широко автоматизировать процесс посадки и повысить эффективность применения беспилотных самолетов путем, например, их группового использования.
Автоматическое отсоединение парашюта или части его строп при приземлении с помощью простой механической системы надежно предохраняют от негативного воздействия возможной парусности парашюта, особенно при посадке в отдалении от операторов.
К тому же при посадке одновременно происходит автоматическая разборка самолета на составные части, что существенно облегчает его транспортировку к месту базирования беспилотного комплекса и сокращает время его обслуживания.
Таким образом, предлагаемые способ парашютной посадки беспилотного самолета и парашютная система беспилотного самолета позволяют существенно повысить надежность наиболее важного этапа эксплуатации, каким всегда является посадка летательных аппаратов, что в целом повышает надежность и эффективность применения комплексов беспилотных самолетов, их экономичность и конкурентоспособность.






Беспилотный самолет с парашютной системой посадки содержит парашют со стропами и подвесной системой, две консоли крыла, стыкуемые посредством фиксируемых шарнирных узлов с возможностью поворота относительно параллельной хорде крыла оси и шарнирного складывания консолей при их расфиксации. Шарнирные узлы стыковки консолей крыла с самолетом выполнены легкоразъемными при разрушении одноразовых элементов фиксации от тарированной нагрузки после поворота консолей в сторону нижней поверхности самолета, к которой прикреплена подвесная система парашюта, на которой установлен замок отсоединения от нее строп парашюта или их части. Консоли снабжены гибкими тягами. Гибкая тяга одной консоли крыла соединена с узлом запирания замка. Способ парашютной посадки беспилотного самолета характеризуется тем, что при раскрытии посадочного парашюта самолет переворачивают и производят снижение верхней поверхностью вниз, приземляют его на одну из законцовок консолей крыла и амортизируют энергию удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку и отделяют консоль от самолета. Группа изобретений направлена на обеспечение надежной посадки при эксплуатации. 2 н. и 12 з.п. ф-лы, 9 ил.
1. Способ парашютной посадки беспилотного самолета, включающий выпуск с него и раскрытие посадочного парашюта, расфиксацию шарнирных узлов стыковки консолей крыла к фюзеляжу, поворот консолей относительно параллельной хорде крыла оси и их шарнирное складывание, снижение самолета под его подвесной системой с помощью парашюта, предохранение самолета от парусности парашюта при приземлении, отличающийся тем, что при раскрытии посадочного парашюта самолет переворачивают и производят снижение верхней поверхностью вниз, приземляют его по меньшей мере на одну из законцовок консолей крыла и амортизируют энергию удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку, отделяют консоль от самолета, при этом от его подвесной системы отсоединяют парашют или часть его строп.
2. Способ парашютной посадки беспилотного самолета по п. 1, отличающийся тем, что при переворачивании самолета на законцовках крыла шарнирно раскладывают вниз снабженные шипами опоры, на которые приземляют самолет и с помощью которых производят якорение законцовок на поверхности приземления, посадочную энергию удара амортизируют работой на сдвиг одноразовых элементов фиксации шарнирных узлов консолей, которые расфиксируют срезом этих элементов, при этом в полете сложенные опоры используют в качестве аэродинамических шайб крыла, при ударном вбивании их шипов в поверхность приземления частично амортизируют энергию удара, консоли крыла отделяют от самолета на привязи гибких тяг, при вытягивании по меньшей мере одной из которых открывают замок отсоединения парашюта или части его строп от подвесной системы.
3. Способ парашютной посадки беспилотного самолета по п. 1, отличающийся тем, что после раскрытия парашюта с помощью подвесной системы самолет подвешивают с наклонным к горизонту положением продольной оси крыла и его приземляют на нижнюю законцовку крыла, отделяют консоль от самолета на привязи гибкой тяги, вытягиванием которой открывают замок отсоединения парашюта или части его строп от подвесной системы, при этом гибкую тягу вытягивают при помощи центробежного усилия в процессе рычажного опрокидывания крыла при приземлении.
4. Способ парашютной посадки беспилотного самолета по п. 3, отличающийся тем, что при переворачивании самолета из нижней законцовки крыла шарнирно выдвигают вниз снабженный шипом штырек, которым производят якорение законцовки при приземлении самолета и при вбивании шипа в поверхность приземления частично амортизируют посадочную энергию удара, основную часть которой амортизируют работой на сдвиг и срез одноразового элемента фиксации шарнирного узла.
5. Способ парашютной посадки беспилотного самолета по п. 3, отличающийся тем, что гибкую тягу пропускают подвижно сквозь консоль крыла вдоль ее размаха и через направляющее отверстие установленного на законцовке зажима, на который приземляют самолет, при этом от ударной нагрузки на зажим с его помощью фиксируют тягу на консоли перед ее вытягиванием.
6. Способ парашютной посадки беспилотного самолета по п. 3, отличающийся тем, что замок отсоединения парашюта или части его строп от подвесной системы открывают посредством электромеханического привода, который включают отделением консоли крыла при приземлении самолета.
7. Способ парашютной посадки беспилотного самолета по п. 1 или 2, отличающийся тем, что посадочную энергию удара амортизируют работой на разрыв одноразовых элементов фиксации шарнирных узлов, которые расфиксируют разрывом этих элементов.
8. Беспилотный самолет с парашютной системой посадки, содержащий парашют со стропами и подвесной системой для самолета, две консоли его крыла, стыкуемые с самолетом посредством фиксируемых шарнирных узлов с возможностью поворота относительно параллельной хорде крыла оси и шарнирного складывания консолей при их расфиксации, отличающийся тем, что шарнирные узлы стыковки консолей крыла с самолетом выполнены легкоразъемными при разрушении одноразовых элементов их фиксации от тарированной нагрузки после поворота консолей в сторону нижней поверхности самолета, к которой прикреплена подвесная система парашюта, на которой установлен замок отсоединения от нее строп парашюта или их части, консоли снабжены гибкими тягами, при этом гибкая тяга по меньшей мере одной консоли крыла соединяет ее с узлом запирания замка.
9. Беспилотный самолет с парашютной системой посадки по п. 8, отличающийся тем, что подвесная система самолета выполнена с наклонным к горизонту положением продольной оси крыла при подвесе на ней самолета под парашютом, при этом с узлом запирания замка соединена гибкая тяга нижней консоли наклоненного крыла.
10. Беспилотный самолет с парашютной системой посадки по п. 8, отличающийся тем, что замок отсоединения парашюта или части его строп от подвесной системы самолета выполнен в виде установленного на подвесной системе четырехзвенного шарнирного механизма, два сочлененных звена которого образуют клещевидный захват кольца, а два других сочлененных звена образуют двухпозиционный распорный узел запирания захвата, при этом гибкие тяги консолей крыла соединяют их с узлом запирания, а кольцо соединено со стропами парашюта или их частью.
11. Беспилотный самолет с парашютной системой посадки по п. 8, отличающийся тем, что замок отсоединения парашюта или части его строп от подвесной системы самолета выполнен в виде установленного на подвесной системе чекового узла запирания кольца, при этом кольцо соединено со стропами парашюта или их частью, а гибкие тяги консолей крыла соединяют их с чекой узла запирания.
12. Беспилотный самолет с парашютной системой посадки по п. 11, отличающийся тем, что на законцовки крыла шарнирно установлен по меньшей мере один снабженный шипом штырек, выполненный с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета.
13. Беспилотный самолет с парашютной системой посадки по п. 8, отличающийся тем, что на законцовки консолей крыла шарнирно установлены опоры с шипами, выполненные в виде аэродинамических шайб с возможностью одностороннего маятникового поворота в нормальном к верхней поверхности крыла направлении при перевернутом положении самолета.
14. Беспилотный самолет с парашютной системой посадки по п. 12 или 13, отличающийся тем, что штырек, или опора, выполнены в выдвинутом положении вертикально подвижными до упора с вхождением их тыльного торца в выемку установленного напротив подпятника, по меньшей мере одна гибкая тяга проходит подвижно через направляющее отверстие в торце консоли крыла, вдоль внутри нее и между выемкой подпятника и тыльным торцом штырька, или опоры, при этом гибкая тяга одним концом соединена с узлом запирания замка отсоединения парашюта или части его строп от подвесной системы самолета.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2010 |
|
RU2456211C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| JP 2006306264 A, 09.11.2006. | |||

