Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных электрических вертолетов-самолетов и гибридных электрических вертолетов-самолетов дупланной схемы крыльев обратной стреловидности с поворотными винтами, применяющих технологии вертикального взлета и посадки (ВВП), короткого взлета и посадки (КВП) или короткого взлета и вертикальной посадки (КВВП) для наземного, аэродромного и корабельного базирования.
Известен беспилотный электроконвертоплан "Panther" корпорации IAI (Израиль), содержащий моноплан двухбалочной схемы с высокорасположенным крылом, двухкилевое П-образное хвостовое оперение, смонтированное на разнесенных балках к консолям крыла, короткий фюзеляж, силовую установку, включающую два передних поворотных, изменяющих ось вращения с горизонтальной на вертикальную, и один задний стационарный с вертикальной осью вращения электромоторы с равновеликими тянущими винтами, смонтированные соответственно в передних окончаниях разнесенных балок и на конце короткого фюзеляжа, систему управления и аккумуляторную батарею, трехстоечное колесное шасси, не убирающееся с передней опорой.
Признаки совпадающие - наличие моноплана двухбалочной схемы с трехколесным шасси и передней опорой. Разнесенные балки соединяют крыло с двухкилевым П-образным хвостовым оперением. Системой управляют три электромотора с тянущими винтами, два передних из которых поворотные. Беспилотный электроконвертоплан (БЭКП) может подниматься на высоту порядка 3 км, находится без подзарядки батарей в воздухе до 6 часов и действовать в радиусе до 60 км от оператора при длительных полетах днем и ночью для телевизионного или инфракрасного наблюдения местности в реальном масштабе времени. Трехвинтовой "Panther" является тактическим разведывательным вертикально взлетающим беспилотным аппаратом, сочетающим в себе преимущества и вертолета, и самолета. БЭКП "Panther" располагает поворотными электромоторами с тянущими винтами и, как вертолет, способен по командно-телеметрической радиолинии совершать вертикальный взлет, посадку и зависание.
Причины, препятствующие поставленной задаче: первая - это то, что БЭКП трехвинтовой несущей схемы с задним винтом постоянного шага на конце фюзеляжа, используемым только на вертолетных режимах полета, имеет из-за отсутствия возможности угла установки лопасти равным φ=0° повышенное аэродинамическое сопротивление на самолетных режимах полета, сложную схему управления электромоторами при независимом вращении трех равновеликих винтов на вертолетных режимах полета, малую весовую отдачу и радиус действия. Вторая - это то, что при висении поток от двух передних и одного заднего тянущих винтов, обдувая соответственно крыло от его носка и кормовую часть фюзеляжа, создают значительную общую потерю (порядка 14%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что расположение в передних окончаниях разнесенных балок поворотных электромоторов с тянущими винтами предопределяет конструктивно сложные узлы их поворота и невозможность при попутном ветре выполнить зависание в воздухе, что усложняет конструкцию и уменьшает надежность. Четвертая - это то, что диапазон высот применения БЭКП - 100…3500 м при взлетном его весе 65 кг.
Известен беспилотный электроконвертоплан [1] фирмы AgustaWestland "Project Zero" (Италия), представляющий собой моноплан со среднерасположенным необычной формы крылом, имеющим с концевыми крылышками внешние съемные части крыла от кольцевых консолей крыла, внутри последних смонтированы электромоторы с тянущими винтами, установленными в поворотных мотогондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, содержит в фюзеляже из углепластика систему управления и аккумуляторные батареи, двухкилевое V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси, с носовой вспомогательной и главными опорами, убираемыми в центроплан крыла.
Признаки совпадающие - наличие поворотных мотогондол с винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота мотогондол с винтами от 0° до +97,5°, содержит систему управления, равномерно распределяющую зарядку аккумуляторов полномасштабного БЭКП между поворотными электромоторами с тянущими винтами, обеспечивающими скорость до 500 км/ч и высоту полета до 7500 м, двухкилевое V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси, с носовой вспомогательной опорой. Для зарядки аккумуляторов воздушные винты при его нахождении на земле могут выставляться в "наклонном" положении, играя роль ветряков электрогенераторов.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение в кольцевых консолях крыла поворотных мотогондол с электромоторами и винтами предопределяет конструктивно сложное крыло необычной формы, оснащенное сложной механизацией и рулевыми поверхностями крыла элевонами, что усложняет конструкцию. Вторая - это то, что диаметры двух тянущих винтов ограничены размахом кольцевых консолей крыла и, как следствие, ограничивает вертикальную тяговооруженность, а возможность короткого взлета и посадки с отклоненными вверх тянущими винтами на угол 45° при обеспечении угла опрокидывания φ=15° предопределяет удлинение высоты стоек шасси на 10-12%. Третья - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота мотогондол с винтами, взлетать и садиться «по-самолетному», как обычный самолет, этот двухвинтовой БЭКП не может, так как радиус его тянущих винтов гораздо больше высоты установки мотогондол внутри кольцевых консолей крыла, что значительно уменьшает безопасность и сложность продольного и поперечного управления с V-образным хвостовым оперением, особенно, на переходных режимах полета, когда у такого крыла вектор его тяги не уравновешивается. Недостатком является также неразвитое хвостовое оперение, отсюда плохая и путевая устойчивость и, особенно, при отказе одного из электромоторов при асимметрии тяги. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи при повышении тяговооруженности.
Наиболее близким к предлагаемому изобретению является высокоскоростной беспилотный вертолет-самолет [2] (Россия), имеющий планер из композитного углепластика с плавным сопряжением крыла и фюзеляжа, переднее горизонтальное оперение, двухкилевое оперение, смонтированное к консолям стреловидного крыла на разнесенных балках, содержит с внешних сторон килей консоли цельноповоротного стабилизатора, двигатели силовой установки, передающие мощность через главный редуктор и удлинительные поворотные валы на тянущий и толкающий винты, расположенные соответственно в носовой и кормовой части фюзеляжа, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу, трехстоечное убирающееся колесное шасси, с носовой вспомогательной и боковыми опорами.
Признаки совпадающие - наличие трех несущих плоскостей продольной схемы триплана: переднее горизонтальное оперение (ПГО), трапециевидное крыло с разнесенными на консолях балками двухкилевого оперения, имеющего с внешних сторон консоли цельноповоротного стабилизатора (ЦПС), и с переменной стреловидностью наплывами, объединяющими в единую конструкцию крыло и фюзеляж, представляющий собой в плоскости симметрии S-образный профиль. Поворотные валы редукторов тянущего и толкающего винтов, связанные с двигателями синхронизирующим валом, расположены соответственно в носовой и кормовой части короткого фюзеляжа и обеспечивают горизонтальную тягу и соответствующим отклонением вверх и вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 65° соответственно при вертикальном или коротком взлете и посадке.
Причины, препятствующие поставленной задаче: первое - это то, что равновеликие диаметры носового и хвостового соответственно тянущего и толкающего поворотных винтов ограничены высотой стоек, особенно, главного шасси, и как, следствие, это ограничивает вертикальную тяговооруженность и, особенно, носового винта, частично затененного максимально отклоненными консолями ПГО, а возможность короткого взлета и посадки с отклоненными винтами на угол 65° при обеспечении угла опрокидывания φ=15° предопределяет удлинение высоты стоек шасси на 10-12%. Вторая - это то, что силовая установка (СУ), включающая газотурбинные двигатели, размещенные с главным редуктором и валами трансмиссии в центральной части короткого фюзеляжа, расположены от последней к носовой и кормовой части фюзеляжа. Это, тем самым, весьма уменьшает полезный объем фюзеляжа, а также возможность размещения разведывательного и регистрирующего оборудования в фюзеляже и, особенно, в носовой его части из-за наличия переднего поворотного вала редуктора тянущего винта. Третья - это то, что задний газотурбинный двигатель СУ, имеющий выхлопы, направленные по бокам и назад, осуществляет вредную обдувку заднего поворотного толкающего винта на самолетных и переходных режимах его полета. Четвертая - это то, что при висении продольное расположение носового и хвостового поворотных винтов (без управления циклическим их шагом) осложняет поперечное управление и для чего необходимо отклонение вверх одной из двух концевых частей крыла, изменяя массовую симметрию, создает момент крена Мх в сторону другой не отклоненной концевой части. Это усложняет конструкцию и затрудняет при его висении поперечную управляемость и возможность при попутном ветре выполнить зависание в воздухе, но и дальнейшего увеличения взлетного веса и весовой отдачи.
Предлагаемым изобретением решается задача в указанном выше известном высокоскоростном беспилотном вертолете-самолете удвоения взлетного веса и повышения весовой отдачи, транспортной и топливной эффективности, упрощения конструкции и исключения управления креном при висении отклонением концевых частей крыла и главного редуктора с валами трансмиссии, упрощения поперечной управляемости при переходных маневрах, вертикальном взлете, посадке и висении и улучшения поперечной и курсовой устойчивости, а также управляемости по крену и курсу.
Отличительными признаками предлагаемого изобретения от указанного выше известного высокоскоростного беспилотного вертолета-самолета, наиболее близкого к нему, является наличие того, что он выполнен с разновеликими крыльями по дупланной аэродинамической схеме, включающей меньшее первое крыло обратной стреловидности и большее, смонтированное ниже первого, второе крыло и концепции продольно-поперечного расположения винтов по схеме 2+2 с возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы, включающей два продольных и два поперечных несущих винта, имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами как в полетную конфигурацию самолета четырех- или двухвинтовой движительный системы соответственно с двумя продольными и двумя поперечными винтами или только с винтами поперечной группы, так и обратно, при этом синхронно изменяющие вектор тяги винты, выполненные многолопастными без автоматов перекоса их лопастей и флюгерно-реверсивными, имеют наряду с двумя винтами продольной группы и два консольных винта поперечной группы, установленных с мотогондолами на концах первого крыла, выполненного для уменьшения затенения консольных винтов при вертикальном взлете, посадке и висении с возможностью поворота его консолей относительно поперечной оси, расположенной перпендикулярно плоскости симметрии, и в виде переустанавливаемой с горизонтального в вертикальное положение, но и обратно левой и правой рулевой поверхности передней многорежимной аэродинамической системы управления балансировкой при висении по курсу и тангажу, оснащенной независимыми узлами их поворота, снабженной в конечном положении после их поворота в вертикальное положение возможностью дифференциального и синфазного их отклонения, при этом синфазное отклонение консолей первого крыла с консольными винтами от их линий вертикальной тяги как назад, так и вперед в направлении полета, создающее возможность висения в воздухе, не перемещаясь соответственно как при попутном, так и встречном ветре с одновременным автоматическим обеспечением стабилизации по угловой скорости тангажа и крена, но и демпфирования изменений высоты полета, причем продольные оси левой и правой мотогондол с консольными винтами, линии горизонтальной тяги которых расположены вдоль продольной оси соответствующей разнесенной балки, образуя соотносящимися их поверхностями равновеликие мидели разнесенных балок и мотогондол, последние из которых с консольными винтами, отклоняемыми на режимах перехода вверх вдоль продольных плоскостей, расположенных по оси разнесенных балок и параллельно плоскости симметрии, имеют на вертолетных режимах полета вертикальные оси их вращения, размещенные вдоль поперечной плоскости, проходящей через центр масс, имеющих равновеликие расстояния от вертикальных осей вращения консольных винтов до центра масс, обеспечивающих возможность создания при вертикальном взлете, посадке и висении управляющих моментов, необходимых для осуществления как поперечной управляемости, реализуемой при помощи увеличения угла установки лопастей левого консольного винта с одной стороны от оси симметрии и уменьшения углов установки лопастей правого консольного винта - с другой при одновременном автоматическом изменении тяги несущих винтов продольной группы, обеспечивающих без изменения тангажа управляемый момент крена, так и продольного управления, создаваемого при помощи дифференцированных изменений угла установки лопастей переднего и заднего несущих винтов продольной группы, но и путевого управления - изменением угла установки лопастей в каждой продольно-поперечной паре несущих винтов, имеющих одинаковое направление вращения, передний несущий с левым консольным винтом и задний несущий с правым консольным винтом, и, следовательно, увеличивая мощность на двух несущих винтах первой группы, имеющих при виде сверху направление вращение по часовой стрелке, и одновременно уменьшая на двух других второй группы, имеющих при этом противоположное направление против часовой стрелки, обеспечивается полный момент рысканья без изменения тангажа, крена и вертикальной тяги всех несущих винтов, при этом силовая установка, выполненная по последовательной гибридной технологии силового привода, снабжена левой и правой консольными мотогондолами с электродвигателями, вращательно связанными с соответствующими винтами поперечной группы, но и носовой и кормовой мотогондолами продольной группы винтов, в которых наряду с поворотными валами соответствующих винтов размещены электродвигатели-генераторы, вращательно связанные с последними и выполненные обратимыми, а носовая из них наряду с поршневым двигателем, содержит выходную и входную муфты сцепления и имеет систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и поршневой двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, причем с целью повышения надежности, обеспечения генерирующей мощности и поддержания постоянной готовности при стоянке на земле и горизонтальном полете его программируемый системно-логический контроллер блока управления, получая от датчика уровня зарядки аккумуляторной батареи и падении ее зарядки соответственно до 50% и 25% от ее максимума, выдает управляющие сигналы как на создание способа генерации мощности в носовой мотогондоле от внутреннего источника энергии, так и входную и выходную электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением и расцеплением соответственно вала с соответствующей стороны электродвигателя-генератора с валом поршневого двигателя и валом тянущего переднего винта, установленного во флюгерное положение, при этом узлы складывания консолей большего крыла, выпуска, руления и уборки шасси, управления механизмами поворота мотогондол и всеми рулевыми поверхностями, имеющие электромеханические приводы, оснащены электродистанционной системой управления, которая с целью увеличения генерирующей мощности при стоянке на земле, получая от датчика скорости ветра, выдает управляющий сигнал на обеспечение как стояночной конфигурации с автоматически отклоненной осью вращения заднего толкающего винта от вертикали назад и сложенными консолями большего крыла, так и на создание способа генерации мощности в кормовой мотогондоле от внешнего источника энергии, включающего носовое электрическое мотор-колесо, имеющее управляемый разворот его носовой части фюзеляжа к встречному ветру для подзарядки аккумуляторной батареи от электродвигателя-генератора кормовой мотогондолы, который, получая вращение от заднего толкающего винта, обеспечит авторотацию при косой его обдувке от набегающего воздушного потока ветра, а величина возникающей при этом отрицательной тяги будет автоматически демпфироваться от величины скорости ветра и, следовательно, задний толкающий винт будет авторотировать на заданном числе оборотов и под контролем регулятора оборотов.
Кроме того, с целью уменьшения размаха консолей цельноповоротного стабилизатора и повышения продольной стабильности каждый киль хвостового оперения с внутренней стороны в продолжение и по средней линии соответствующей внешней консоли цельноповоротного стабилизатора, имеющего низкое расположение, снабжен межкилевым стреловидным стабилизатором большого удлинения, установленным так, что на горизонтальной проекции передняя его кромка, находясь на одной линии с передней кромкой соответствующей консоли цельноповоротного стабилизатора, имеет заднюю кромку с уступом от задней кромки последнего и V-образным изломом в плане, уменьшающим затенение заднего толкающего винта при создании им вертикальной тяги, причем с целью обеспечения устойчивости при расположении передней мотогондолы в носовой части фюзеляжа, увеличения критической скорости дивергенции заднего крыла и уменьшения его размаха, а также лобового сопротивления его второе крыло, выполненное с обратной стреловидностью, имеющее на горизонтальной проекции близко расположенную заднюю кромку левой и правой его консоли к передней кромке соответственно правой и левой консоли межкилевого стреловидного стабилизатора, образующее с последним и внешними консолями цельноповоротного стабилизатора как бы Х-образное в плане крыло в аэродинамической схеме "утка".
Кроме того, с целью увеличения полезного объема транспортного отсека фюзеляжа, упрощения конструкции, исключения переднего винта продольной группы и консолей цельноповоротного стабилизатора он выполнен по концепции тандемного расположения разновеликих винтов по схеме 2+1 так, что передние два меньших винта и задний больший винт, размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют соответственно на вертолетных режимах полета меньшее и большее расстояния от вертикальных их осей вращения до центра масс, но и с возможностью преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы, включающей два передних и один задний винты, имеющие при этом противоположное направление вращения между передними и задним винтами при одинаковом направлении вращения передних винтов между собой, как в самолете с трехвинтовой или двухвинтовой, или одновинтовой движительной системой, так и обратно, при этом наряду двух тянущих меньших винтов на поворотных консольных мотогондолах его тянущий больший винт, установленный на задней мотогондоле, смонтированной по оси симметрии на трапециевидном межкилевом цельноповоротном стабилизаторе, поперечная ось поворота которого расположена параллельно поперечной оси поворота консолей первого крыла, выполненном в виде отклоняемой как с вертикального в горизонтальное положение, так и обратно стабилизирующей поверхности, консоли которой оснащены с раздельными приводами развитыми левой и правой рулевыми поверхностями задней многорежимной аэродинамической системы управления балансировкой по курсу и тангажу, снабженной в каждом конечном положении после поворота ее консолей возможностью обеспечивать максимально эффективные углы соответственно дифференциального и синфазного отклонения рулевых поверхностей как при вертикальном взлете, посадке и висении, так и самолетных режимах полета, причем с целью обеспечения возможности создания и генерирующей мощности, и одновременно крейсерской горизонтальной тяги его силовая установка, выполненная по параллельно-последовательной гибридной технологии, включающая в консольных и задней мотогондолах, первые две из которых, имея между собой равные, а вместе большие располагаемые мощности, чем у одной задней, содержащая в каждой мотогондоле и структуре располагаемой мощности наряду с пиковой мощностью электромагнитного двигателя-генератора с постоянным магнитом, снабжена за ним и соосно последнему расположенным тандемом турбовинтовым двигателем, имеющим взлетную мощность, составляющую меньшую 1/4 часть от пиковой мощности последнего, и выполненным с возможностью работы при различных углах его отклонения в вертикальной плоскости, но и с обеспечением как двух способов работы, так и, по меньшей мере, одного для системы генерации мощности при заряде аккумуляторов соответственно как совместной работы с последним, имеющим режим электромагнитного двигателя-электромотора или поочередной их работы на один вал соответствующего несущего винта, так и самостоятельной работы при распределенной передаче номинальной его мощности и на последний, имеющий режим электромагнитного двигателя-электрогенератора, и соответствующий тянущий винт. Благодаря наличию этих признаков, позволяющих выполнить беспилотный электрический вертолет-самолет по конструктивно-силовой дупланной схеме и концепции продольно-поперечного расположения винтов (ППРВ) по схеме 2+2, что позволит сравнительно дешево удвоить вертикальную грузоподъемность и обеспечит возможность преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы, включающей поворотные два продольных и два поперечных винта, в самолет четырех- или двухвинтовой движительной системы, так и обратно. Поскольку аэродинамическая дупланная схема, включающая меньшее первое крыло обратной стреловидности, то может быть оснащена также и большим вторым крылом обратной стреловидности, смонтированным ниже переднего. При этом второе крыло обратной стреловидности смонтировано с близко расположенной задней его кромкой к передней кромке соответствующих консолей межкилевого стреловидного горизонтального оперения и цельноповоротного стабилизатора так, что на горизонтальной проекции образует с последними как бы Х-образное в плане крыло в аэродинамической схеме "утка". В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение зарядки литиево-ионной полимерной аккумуляторной батареи снизится до 25% от ее максимума система управления автоматически отключит выходной муфтой сцепления передний винт продольной группы от электродвигателя, имеющего с винтом расположенную горизонтально ось их вращения на самолетных режимах полета, установит его лопасти во флюгерное положение и включит поршневой двигатель носовой мотогондолы продольной группы винтов, который будет вращать электродвигатель-генератор, обеспечивающий подзарядку аккумуляторов в полетной конфигурации самолета. Кроме того, увеличение генерирующей мощности для электропитания может обеспечиваться также и от кормовой мотогондолы, электродвигатель которой, работая при крейсерском полете в режиме электроветрогенератора, получает вращение от заднего толкающего винта, ось вращения которого отклонена от вертикали назад в направлении полета, что предопределяет авторотацию при косой его обдувке от набегающего потока на самолетных режимах полета, а величина возникающей при этом отрицательной тяги не будет значительной, так как лопасти заднего толкающего винта установлены регулятором не на минимальный угол, потому что при дальнейшем полете без изменения скорости толкающий винт будет авторотировать на оптимальном числе оборотов и под контролем регулятора оборотов, который при незначительном увеличении скорости полета автоматически затяжелит винт, при уменьшении - уменьшит установочный угол и винт будет облегчаться, но обороты сохранятся и величина отрицательной тяги будет постоянно одинаковой и, следовательно, обеспечит стабильное увеличение генерирующей мощности при крейсерском полете, но и повысит продольную стабильность и управляемость в полетной конфигурации самолета с двухвинтовой движительной системой на левой и правой мотогондолах с соответствующими консольными винтами. Все это позволит достичь весьма малошумной гибридной СУ, имеющей систему электропривода, включающую электродвигатели, питаемые от аккумуляторной батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и поршневой двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, что обеспечит при равномерном распределение зарядки аккумуляторной перезаряжаемой батареи возможность работы электродвигателей и, особенно, поршневого двигателя без пиковых перегрузок и при минимальной акустической сигнатуре. Наличие этих признаков позволит при переходных маневрах повысить путевую устойчивость и управляемость по курсу, но и продольную стабильность и поперечную управляемость, а размещение гибридной СУ в носовой части фюзеляжа обеспечит упрощение системы управления электроприводами, но и позволит исключить вредную обдувку выхлопными газами поршневого двигателя заднего толкающего винта. Это позволит также повысить безопасность полетов и использовать поршневой двигатель меньших габаритов в его поперечнике, что обеспечит уменьшение как миделя фюзеляжа, так и ширину переднего обтекателя носовой части фюзеляжа и, следовательно, предопределит меньшее затенение соответствующего поворотного тянущего винта при вертикальном взлете, посадке и висении. Для исключения переднего тянущего винта продольной группы и консолей цельноповоротного стабилизатора его компоновка может быть выполнена по концепции тандемного расположения разновеликих винтов (ТРРВ) по схеме 2+1. При этом наряду двух тянущих меньших винтов на поворотных консольных мотогондолах его тянущий больший винт установлен на задней мотогондоле, смонтированной по оси симметрии на трапециевидном межкилевом цельноповоротном стабилизаторе. Что позволит уменьшить вес планера, увеличить полезную нагрузку, повысить весовую отдачу, транспортную и топливную эффективность. Кроме того, при висении, максимально поворачивая вверх консоли цельноповоротного переднего крыла обратной стреловидности, но и межкилевого цельноповоротного стабилизатора на угол 90°, это позволит значительно уменьшить потери вертикальной тяги соответственно левого и правого консольных меньших винтов, но и заднего большего винта.
Предлагаемое изобретение гибридного беспилотного электрического вертолета-самолета (БЭВС) и варианты его использования представлены на фиг.1-3.
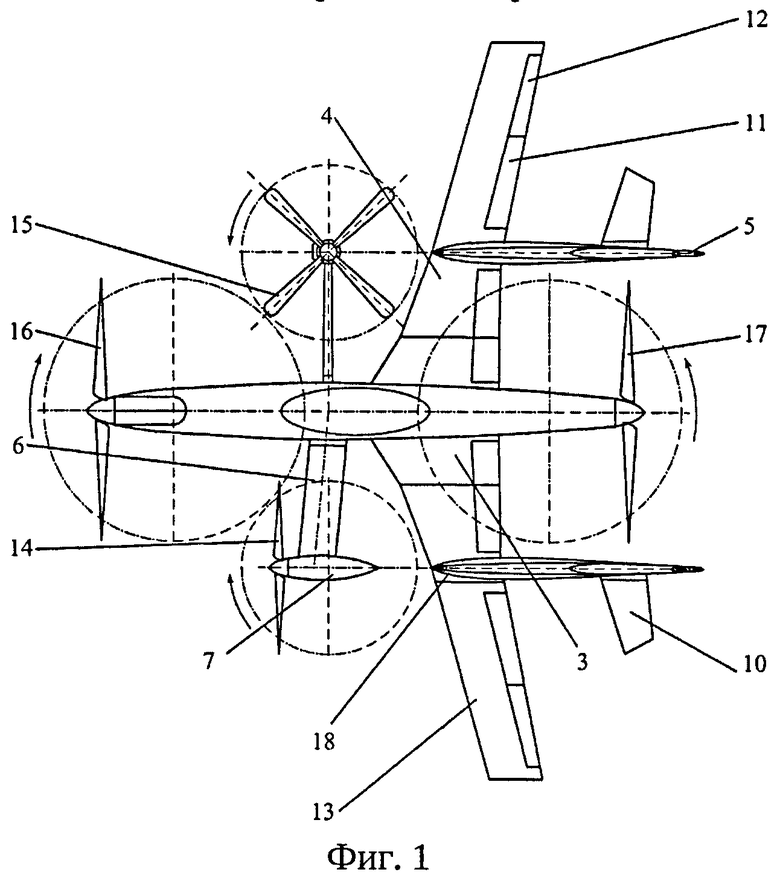
На фиг.1 на общем виде сверху изображен БЭВС исполнения ППРВ-Х2+2 с большим стреловидным крылом, двухкилевым хвостовым оперением и межкилевым стреловидным горизонтальным оперением в полетной конфигурации самолета с четырехвинтовой движительной системой на крейсерских режимах полета с условным расположением консольных тянущих левого и правого винтов на поворотных консолях первого меньшего крыла соответственно в конфигурации самолета и вертолета.
На фиг.2 на общих видах сбоку и сверху изображен БЭВС с двухкилевым хвостовым оперением и межкилевым стреловидным горизонтальным оперением, образующим с большим крылом обратной стреловидности как бы Х-образное крыло в плане в полетной конфигурации соответственно вертолета исполнения ППРВ-Х2+2 и самолета с четырехвинтовой движительной системой на крейсерских режимах полета с условным расположением тянущих левого и правого винтов на поворотных консолях переднего крыла соответственно на самолетных и вертолетных режимах полета.
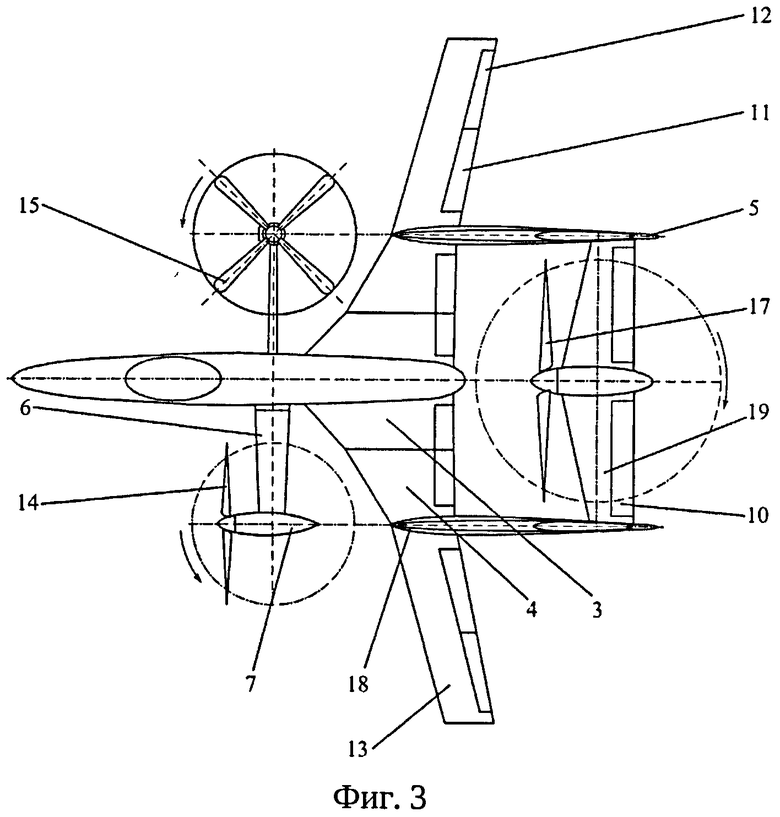
На фиг.3 на общем виде сверху изображен БЭВС исполнения ТРРВ-Х2+1 с гибридными двухдвигательными мотогондолами, двухкилевым хвостовым оперением и межкилевым цельноповоротным стабилизатором в полетной конфигурации самолета с трехвинтовой движительной системой на крейсерских режимах полета с условным расположением тянущих левого и правого винтов на поворотных консолях первого крыла соответственно на самолетных и вертолетных режимах полета.
Беспилотный электрический вертолет-самолет, выполненный по дупланной аэродинамической схеме и представленный на фиг.2, содержит короткий фюзеляжа 1 и среднерасположенное крыло 2, имеющее впереди его наплывы 3 с переменной стреловидностью, плавно переходящими в межбалочную часть 4 крыла 2, объединяющую фюзеляж 1 и второе крыло 2 с разнесенными балками 5 в единую плавно образованную конструктивно-силовую двухбалочную схему (см. фиг.2). Перед крылом 2 обратной стреловидности смонтировано цельноповортное меньшее первое крыло обратной стреловидности (ЦМПК) 6, имеющее на концах поворотных его консолей мотогондолы 7 с винтами поперечной группы. Разнесенные балки 5 соединяют крыло 2 с двухкилевым хвостовым оперением 8, имеющим рули направления 9 и внешние консоли цельноповоротного стабилизатора (ЦПС) 10. Трапециевидное крыло 2, оснащенное закрылками 11 и элеронами 12, размещено в дупланной аэродинамической схеме ниже консолей ЦМПК 6 с мотогондолами 7, смонтированными соосно продольной оси разнесенных балок 5, имеют диапазон их поворота от -5° до +97,5°. При этом концевые части 13 крыла 2 выполнены отклоняющимися вверх и складывающимися для удобства размещения на палубе (ангаре) и возможности эксплуатации на авианесущих кораблях, а также на стоянке при выработке генерирующей энергии.
Силовая установка выполнена по гибридной технологии силового привода, левая и правая консольные поворотные мотогондолы 7 которого снабжены электродвигателями, вращающими левый 14 и правый 15 тянущие винты поперечной группы, а носовая и кормовая мотогондолы, которые наряду с поворотными валами переднего 16 и заднего 17 винтов продольной группы снабжены электродвигателем с постоянным магнитом (ЭДПМ), приводящими последние и выполненными обратимыми, что позволит использовать их и в качестве электрогенераторов. Передняя из них наряду, например, имея дизельный двигатель с турбонаддувом (ДДТ), содержит выходную и входную муфты сцепления, отключающие такой обратимый ЭДПМ соответственно от переднего винта 16 и ДДТ, и имеет систему электропривода, содержащую электродвигатели, питаемые от аккумуляторов, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и генерирующий ДДТ, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, что обеспечит при равномерном распределении зарядки литиево-ионной полимерной аккумуляторной перезаряжаемой батареи возможность преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы, включающей два поперечных 14-15 и два продольных 16-17 несущих винта.
При этом ДДТ, выполненный для отбора взлетной его мощности с передним выводом вала, установлен с максимальной простотой обслуживания и эксплуатации в передней мотогондоле фюзеляжа 1. Поворотные винты двух поперечных 14-15 и двух продольных 16-17 выполнены флюгерно-реверсивными и без автоматов перекоса их лопастей и с жестким креплением угле- и стеклопластиковых лопастей и возможностью изменения углов их установки. Продольной группы из них смонтированы соответственно в носовой и кормовой частях фюзеляжа 1, имеющих соответственно сверху от начала и снизу от конца раскрываемые продольные проемы 18, снабженные направляющими для поворота корпуса поворотных валов с винтами 16-17. Поворот мотогондол с четырехлопастными винтами 14-15 и 16-17, преобразующих его полетную конфигурацию с вертолета четырехвинтовой несущей схемы в четырехвинтовой самолет двухбалочной и дупланной схемы, осуществляется с помощью электромеханических приводов, а выпуск и уборка шасси, управление закрылками 11, элеронами 12 и ЦПС 10 осуществляется также электрически (на фиг.2 не показаны).
Для уменьшения размаха консолей ЦПС 10 и повышения продольной стабильности каждый киль хвостового оперения 8 с внутренней стороны в продолжение и по средней линии соответствующей внешней консоли ЦПС 10, имеющего низкое расположение, снабжен межкилевым стреловидным стабилизатором (МСС) 19 большого удлинения. При этом второе большее крыло 2 обратной стреловидности смонтировано с близко расположенной задней его кромкой к передней кромке соответствующих консолей межкилевого стреловидного горизонтального оперения 19 и цельноповоротного стабилизатора 10 так, что на горизонтальной проекции образует с последними как бы Х-образное в плане крыло в аэродинамической схеме "утка".
Для размещения целевой нагрузки - оптико-электронной, радиотехнической и разведывательной аппаратуры (для телевизионного и инфракрасного наблюдения местности в реальном масштабе времени), а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу предусмотрен в фюзеляже 1 отсек 20. В состав данного оборудования могут входить автоматический радиопеленгатор, автопилот и системы РЭБ с пассивными и активными средствами. Дальность связи может составлять: по радиоканалу закрытой связи и прямой радиовидимости на удалении от базовой автоматизированной станции до 400 км при высоте его полета не ниже 8500 м, а по спутниковому каналу в зоне его действия. Трехопорное убирающееся колесное шасси, носовая опора с колесом 21 убирается в переднюю нишу фюзеляжа 1, главные боковые опоры с колесами 22 - в отсеки разнесенных балок 5, снабженных снизу створками, закрывающими нишу.
Управление гибридным БЭВС обеспечивается общим и дифференциальным изменением шага поворотных винтов, двух поперечных 14-15 и двух продольных 16-17, и отклонением рулевых поверхностей 9, 10 и 12, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крыльями 2 и ЦМПК 6, горизонтальная тяга - винтами 14-15 и 16-17, на режиме висения только винтами 14-15 и 16-17, на режиме перехода - крыльями 2 и ЦМПК 6 с винтами 14-15 и 16-17. При переходе к вертикальному взлету-посадке (висению) раскрываются проемы 18 и затем закрылки 11 крыла 2 отклоняются на максимальные их углы синхронно с поворотов двух поперечных 14-15 и двух продольных 16-17 винтов от горизонтального положения, отклоняясь из них вверх и только задний толкающий винт 17 вниз, устанавливаются вертикально (см. фиг.2). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением консолей ЦПС 10, создающих, работая в зоне обдува поперечных винтов 14-15, парирующую силу. После установки поворотных винтов, поперечных 14-15 и продольных 16-17, в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них несущие винты, поперечные 14-15 и продольные 16-17, имея взаимно противоположное их вращение в каждой группе винтов, образуют под БЭВС область уплотненного воздуха, создающего эффект воздушной подушки, повышающей их эффективность. Поворотные поперечные 14-15 и продольные 16-17 винты отклоняются от горизонтального положения в вертикальное на угол 90° и 65° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) БЭВС на вертолетных и самолетных режимах его полета. Для соответствующей посадки скоростного БЭВС на поверхность земли (палубы корабля) используются колеса 21 и 22 убирающегося трехопорного шасси.
При висении на вертолетных режимах полета продольное управление БЭВС осуществляется изменением шага винтов продольной группы 16-17, путевое управление - изменением крутящих моментов каждой группы винтов, имеющих одинаковое направление вращения переднего несущего винта 16 с левым консольным винтом 14 и заднего несущего винта 17 с правым консольным винтом 15. Поперечное управление обеспечивается изменением шага левого 14 и правого 15 консольных винтов, осуществляющих поперечную балансировку при одновременном соответствующем изменении шага продольных винтов 16-17, обеспечивающих при этом продольную стабилизацию в связи с изменяемой продольной балансировкой. Отсутствие при висении перекрытия передних 17 и задних 18-19 винтов также значительно снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на самолетный режим полета поворотные винты 14-15 и 16-17 синхронно устанавливаются в горизонтальное положение (см. фиг.2). После чего закрываются проемы 18 и производится крейсерский полет, при котором путевое управление обеспечивается рулями направления 9. Продольное и поперечное управление может осуществляться синфазным и дифференциальным отклонением ЦПС 10 и элеронов 12 соответственно. На самолетных режимах полета БЭВС при создании горизонтальной тяги его винты, поперечные 14-15 и продольные 16-17, имеют взаимно противоположное их вращение в каждой группе винтов, и тем самым соответственно устраняют гироскопический эффект и обеспечивают более плавное обтекание крыла 2 и ЦМПК 6, но и весьма повышающее эффективность продольной группы 16-17 винтов. При его полетной вертолетной конфигурации четырехвинтовой несущей схемы реактивные моменты от поворотных винтов 14-15 и 16-17, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения.
Таким образом, БЭВС с конструктивно-силовой двухбалочной схемой, имеющий продольные и поперечные винты, двухкилевое оперение на разнесенных балках, представляет собой гибридный конвертоплан дупланной схемы с обратимыми электромагнитными двигателями-генераторами (ЭМДГ). Поворотные винты флюгерно-реверсивные, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Причем ЦМПК находится спереди большего крыла и создает дополнительную подъемную силу и разгружает его, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать и выполнение технологии ВВП и КВП, но и КВВП. Последнее весьма важно при палубном базировании и, особенно, БЭВС, так как обеспечивает короткий взлет (достаточно и 30 м) с максимальным его весом и вертикальную его посадку пустого на палубу корабля.
В настоящее время известно, что конструктивно-силовые двухбалочная и, особенно, дупланная схемы самолетов обеспечивают максимальную разгрузку крыла и фюзеляжа от действия аэродинамических и массовых сил, а четырех- и трехвинтовые конвертопланы, что они устойчивы и управляемы, то, следовательно, все они пригодны для дальнейших инженерных приложений, могут и должны являться предметом дальнейшего исследования и усовершенствования. Поэтому дальнейшие исследования по созданию БЭВС и гибридных электрических вертолетов-самолетов (ГЭВС), используя вышеназванные преимущества, позволят освоить широкое их семейство.
Наиболее актуальным в современных условиях для этих целей является освоение коммерческого ГЭВС с взлетным весом 1500 и 1760 кг и для перевозки 3 и 5 человек с дальностью полета до 1625 и 2125 км соответственно при выполнении ВВП и КВП. В гибридной СУ ГЭВС исполнения ППРВ-Х2+2, включающей четыре обратимых ЭДПМ суммарной пиковой мощности 400 кВт и номинальной - 220 кВт, имеется генераторный дизельный двигатель с турбонаддувом, который при необходимости может предоставить еще 77 кВт (105 л.с). При благоприятных погодных условиях литиевая батарея позволит ГЭВС-0,4 улететь на расстояние в 750 км при крейсерской скорости 500 км/ч. Однако при падении зарядки до 25% от максимального значения включится дизельный двигатель и будет в полете подпитывать аккумуляторы. Топливный его бак при выполнении ВВП вмещает 88 л бензина, что эквивалентно дополнительным 875 км и позволит при ВВП достичь дальности полета до 1625 км.
В конечном итоге широкие эксплуатационные требования к конвертопланам нового поколения несомненно приведут к созданию и освоению скоростных БЭВС и ГЭВС, позволяющих реализовать реально высокие технико-экономические результаты, позволяющие достойно конкурировать с корпорацией IAI (Израиль) и фирмой "AgustaWestland" (Италия), производящими аналогичные БЭКП и конвертопланы.
Литература
1. Патент EP №2551190 A1 (Convertiplane AgustaWestland S.p.A.), 29.07.2011.
2. Патент RU №2464203 (Дуров Д.С. Высокоскоростной беспилотный вертолет-самолет), 02.08.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
Изобретение относится к области авиационной техники, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный вертолет-самолет имеет планер из композитного углепластика, переднее горизонтальное оперение, двухкилевое оперение, смонтированное к консолям крыла на разнесенных балках, содержит с внешних сторон килей консоли цельноповоротного стабилизатора, гибридную силовую установку, передающую мощность на поворотные валы винтов, трехстоечное убирающееся колесное шасси с носовой и главными боковыми опорами. Планер может быть выполнен по дупланной схеме и концепции продольно-поперечного расположения винтов по схеме 2+2, при этом равновеликие винты выполнены многолопастными без автоматов перекоса, а силовая установка, выполненная по гибридной технологии, снабжена левой и правой консольными мотогондолами, в которых размещены электродвигатели, а в носовой и кормовой установлены электродвигатели-генераторы, и кроме того в носовой мотогондоле установлен поршневой двигатель. При выполнении планера по схеме 2+1 с двумя меньшими передними и задним большим винтами гибридная силовая установка содержит консольные мотогондолы, в которых тандемом с двигателями-генераторами установлены турбовинтовые двигатели. Достигается повышение весовой отдачи, транспортной и топливной эффективности, улучшение поперечной и курсовой устойчивости. 2 н. и 1 з.п. ф-лы, 3 ил.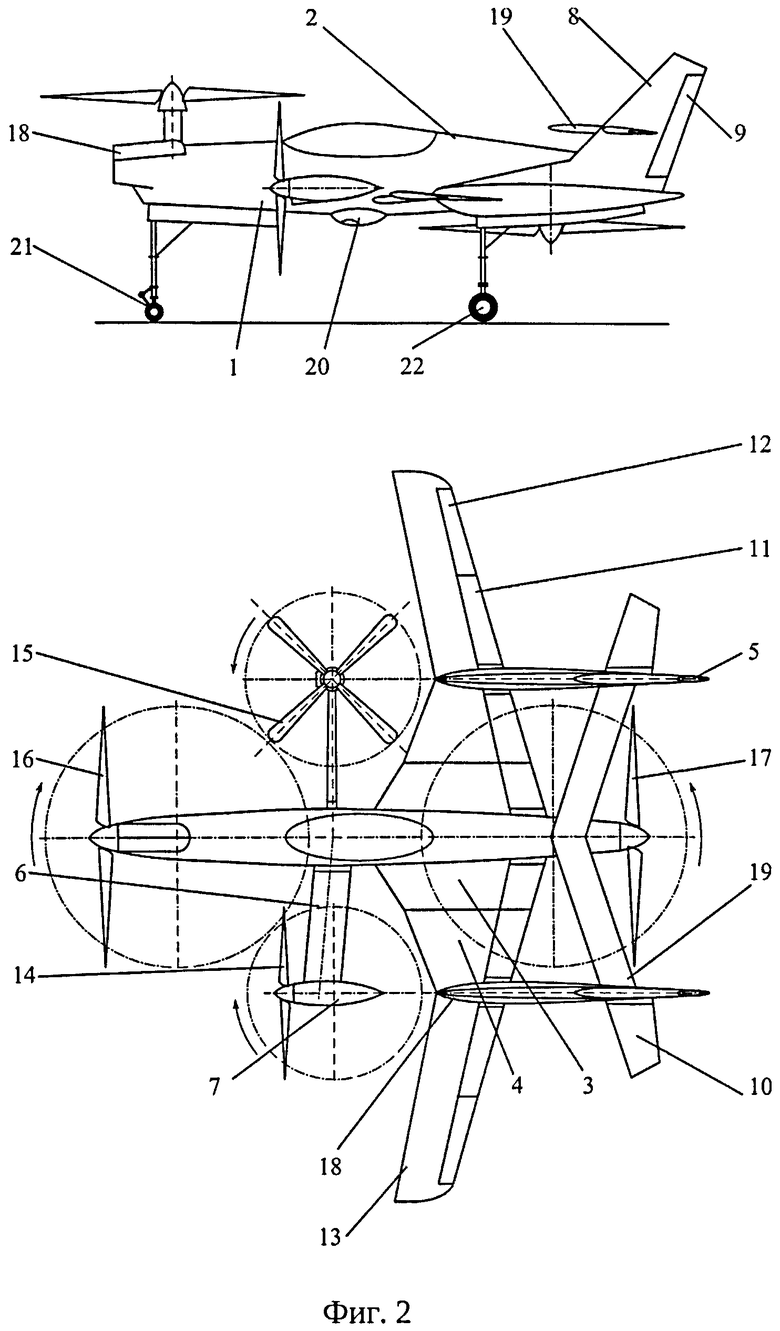
1. Беспилотный вертолет-самолет с гибридной силовой установкой, имеющий планер из композитного углепластика с плавным сопряжением крыла и фюзеляжа, переднее горизонтальное оперение, двухкилевое оперение, смонтированное к консолям стреловидного крыла на разнесенных балках, содержит с внешних сторон килей консоли цельноповоротного стабилизатора, двигатели силовой установки, передающие мощность через главный редуктор и удлинительные поворотные валы на тянущий и толкающий винты, расположенные соответственно в носовой и кормовой части фюзеляжа, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу, трехстоечное убирающееся колесное шасси, с носовой вспомогательной и боковыми опорами, отличающийся тем, что он выполнен с разновеликими крыльями по дупланной аэродинамической схеме, включающей меньшее первое крыло обратной стреловидности и большее, смонтированное ниже первого, второе крыло и концепции продольно-поперечного расположения винтов по схеме 2+2 с возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой несущей схемы, включающей два продольных и два поперечных несущих винта, имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами как в полетную конфигурацию самолета четырех- или двухвинтовой движительной системы соответственно с двумя продольными и двумя поперечными винтами или только с винтами поперечной группы, так и обратно, при этом синхронно изменяющие вектор тяги винты, выполненные многолопастными без автоматов перекоса их лопастей и флюгерно-реверсивными, имеют наряду с двумя винтами продольной группы и два консольных винта поперечной группы, установленных с мотогондолами на концах первого крыла, выполненного для уменьшения затенения консольных винтов при вертикальном взлете, посадке и висении с возможностью поворота его консолей относительно поперечной оси, расположенной перпендикулярно плоскости симметрии, и в виде переустанавливаемой с горизонтального в вертикальное положение, но и обратно левой и правой рулевой поверхности передней многорежимной аэродинамической системы управления балансировкой при висении по курсу и тангажу, оснащенной независимыми узлами их поворота, снабженной в конечном положении после их поворота в вертикальное положение возможностью дифференциального и синфазного их отклонения, при этом синфазное отклонение консолей первого крыла с консольными винтами от их линий вертикальной тяги как назад, так и вперед в направлении полета, создающее возможность висения в воздухе, не перемещаясь соответственно как при попутном, так и встречном ветре с одновременным автоматическим обеспечением стабилизации по угловой скорости тангажа и крена, но и демпфирования изменений высоты полета, причем продольные оси левой и правой мотогондол с консольными винтами, линии горизонтальной тяги которых расположены вдоль продольной оси соответствующей разнесенной балки, образуя соотносящимися их поверхностями равновеликие мидели разнесенных балок и мотогондол, последние из которых с консольными винтами, отклоняемыми на режимах перехода вверх вдоль продольных плоскостей, расположенных по оси разнесенных балок и параллельно плоскости симметрии, имеют на вертолетных режимах полета вертикальные оси их вращения, размещенные вдоль поперечной плоскости, проходящей через центр масс, имеющих равновеликие расстояния от вертикальных осей вращения консольных винтов до центра масс, обеспечивающих возможность создания при вертикальном взлете, посадке и висении управляющих моментов, необходимых для осуществления как поперечной управляемости, реализуемой при помощи увеличения угла установки лопастей левого консольного винта с одной стороны от оси симметрии и уменьшения углов установки лопастей правого консольного винта - с другой при одновременном автоматическом изменении тяги несущих винтов продольной группы, обеспечивающих без изменения тангажа управляемый момент крена, так и продольного управления, создаваемого при помощи дифференцированных изменений угла установки лопастей переднего и заднего несущих винтов продольной группы, но и путевого управления - изменением угла установки лопастей в каждой продольно-поперечной паре несущих винтов, имеющих одинаковое направление вращения, передний несущий с левым консольным винтом и задний несущий с правым консольным винтом, и, следовательно, увеличивая мощность на двух несущих винтах первой группы, имеющих при виде сверху направление вращение по часовой стрелке, и одновременно уменьшая на двух других второй группы, имеющих при этом противоположное направление против часовой стрелки, обеспечивается полный момент рысканья без изменения тангажа, крена и вертикальной тяги всех несущих винтов, при этом силовая установка, выполненная по последовательной гибридной технологии силового привода, снабжена левой и правой консольными мотогондолами с электродвигателями, вращательно связанными с соответствующими винтами поперечной группы, но и носовой и кормовой мотогондолами продольной группы винтов, в которых наряду с поворотными валами соответствующих винтов размещены электродвигатели-генераторы, вращательно связанные с последними и выполненные обратимыми, а носовая из них наряду с поршневым двигателем содержит выходную и входную муфты сцепления и имеет систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и поршневой двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, причем с целью повышения надежности, обеспечения генерирующей мощности и поддержания постоянной готовности при стоянке на земле и горизонтальном полете его программируемый системно-логический контроллер блока управления, получая от датчика уровня зарядки аккумуляторной батареи и падении ее зарядки соответственно до 50% и 25% от ее максимума, выдает управляющие сигналы как на создание способа генерации мощности в носовой мотогондоле от внутреннего источника энергии, так и входную и выходную электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением и расцеплением соответственно вала с соответствующей стороны электродвигателя-генератора с валом поршневого двигателя и валом тянущего переднего винта, установленного во флюгерное положение, при этом узлы складывания консолей большего крыла, выпуска, руления и уборки шасси, управления механизмами поворота мотогондол и всеми рулевыми поверхностями, имеющие электромеханические приводы, оснащены электродистанционной системой управления, которая с целью увеличения генерирующей мощности при стоянке на земле, получая от датчика скорости ветра, выдает управляющий сигнал на обеспечение как стояночной конфигурации с автоматически отклоненной осью вращения заднего толкающего винта от вертикали назад и сложенными консолями большего крыла, так и на создание способа генерации мощности в кормовой мотогондоле от внешнего источника энергии, включающего носовое электрическое мотор-колесо, имеющее управляемый разворот его носовой части фюзеляжа к встречному ветру для подзарядки аккумуляторной батареи от электродвигателя-генератора кормовой мотогондолы, который, получая вращение от заднего толкающего винта, обеспечит авторотацию при косой его обдувке от набегающего воздушного потока ветра, а величина возникающей при этом отрицательной тяги будет автоматически демпфироваться от величины скорости ветра, и, следовательно, задний толкающий винт будет авторотировать на заданном числе оборотов и под контролем регулятора оборотов.
2. Беспилотный вертолет-самолет с гибридной силовой установкой по п.1, отличающийся тем, что с целью уменьшения размаха консолей цельноповоротного стабилизатора и повышения продольной стабильности каждый киль хвостового оперения с внутренней стороны в продолжение и по средней линии соответствующей внешней консоли цельноповоротного стабилизатора, имеющего низкое расположение, снабжен межкилевым стреловидным стабилизатором большого удлинения, установленным так, что на горизонтальной проекции передняя его кромка, находясь на одной линии с передней кромкой соответствующей консоли цельноповоротного стабилизатора, имеет заднюю кромку с уступом от задней кромки последнего и V-образным изломом в плане, уменьшающим затенение заднего толкающего винта при создании им вертикальной тяги, причем с целью обеспечения устойчивости при расположении передней мотогондолы в носовой части фюзеляжа, увеличения критической скорости дивергенции заднего крыла и уменьшения его размаха, а также лобового сопротивления его второе крыло, выполненное с обратной стреловидностью, имеющее на горизонтальной проекции близко расположенную заднюю кромку левой и правой его консоли к передней кромке соответственно правой и левой консоли межкилевого стреловидного стабилизатора, образующее с последним и внешними консолями цельноповоротного стабилизатора как бы Х-образное в плане крыло в аэродинамической схеме "утка".
3. Беспилотный вертолет-самолет с гибридной силовой установкой, имеющий планер из композитного углепластика с плавным сопряжением крыла и фюзеляжа, переднее горизонтальное оперение, двухкилевое оперение, смонтированное к консолям стреловидного крыла на разнесенных балках, содержит с внешних сторон килей консоли цельноповоротного стабилизатора, двигатели силовой установки, передающие мощность через главный редуктор и удлинительные поворотные валы на тянущий и толкающий винты, расположенные соответственно в носовой и кормовой части фюзеляжа, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу, трехстоечное убирающееся колесное шасси с носовой вспомогательной опорой, отличающийся тем, что с целью увеличения полезного объема транспортного отсека фюзеляжа, упрощения конструкции, исключения переднего винта продольной группы и консолей цельноповоротного стабилизатора он выполнен по концепции тандемного расположения разновеликих винтов по схеме 2+1 так, что передние два меньших винта и задний больший винт, размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют соответственно на вертолетных режимах полета меньшее и большее расстояния от вертикальных их осей вращения до центра масс, но и с возможностью преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы, включающей два передних и один задний винты, имеющие при этом противоположное направление вращения между передними и задним винтами при одинаковом направлении вращения передних винтов между собой, как в самолет с трехвинтовой или двухвинтовой, или одновинтовой движительной системой, так и обратно, при этом наряду двух тянущих меньших винтов на поворотных консольных мотогондолах его тянущий больший винт, установленный на задней мотогондоле, смонтированной по оси симметрии на трапециевидном межкилевом цельноповоротном стабилизаторе, поперечная ось поворота которого расположена параллельно поперечной оси поворота консолей первого крыла, выполненном в виде отклоняемой как с вертикального в горизонтальное положение, так и обратно стабилизирующей поверхности, консоли которой оснащены с раздельными приводами развитыми левой и правой рулевыми поверхностями задней многорежимной аэродинамической системы управления балансировкой по курсу и тангажу, снабженной в каждом конечном положении после поворота ее консолей возможностью обеспечивать максимально эффективные углы соответственно дифференциального и синфазного отклонения рулевых поверхностей как при вертикальном взлете, посадке и висении, так и самолетных режимах полета, причем с целью обеспечения возможности создания и генерирующей мощности, и одновременно крейсерской горизонтальной тяги его силовая установка, выполненная по параллельно-последовательной гибридной технологии, включающая в консольных и задней мотогондолах, первые две из которых, имея между собой равные, а вместе большие располагаемые мощности, чем у одной задней, содержащая в каждой мотогондоле и структуре располагаемой мощности наряду с пиковой мощностью электромагнитного двигателя-генератора с постоянным магнитом, снабжена за ним и соосно последнему расположенным тандемом турбовинтовым двигателем, имеющим взлетную мощность, составляющую меньшую 1/4 часть от пиковой мощности последнего, и выполненным с возможностью работы при различных углах его отклонения в вертикальной плоскости, но и с обеспечением как двух способов работы, так и, по меньшей мере, одного для системы генерации мощности при заряде аккумуляторов соответственно как совместной работы с последним, имеющим режим электромагнитного двигателя-электромотора или поочередной их работы на один вал соответствующего несущего винта, так и самостоятельной работы при распределенной передаче номинальной его мощности и на последний, имеющий режим электромагнитного двигателя-электрогенератора, и соответствующий тянущий винт.
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| US 7874513 B1, 25.01.2011 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| US 6655631 B2, 02.12.2003 | |||

