Изобретение относится к устройствам гальванотехники и может быть использовано в гальванических линиях для интенсификации гальванотехнической обработки деталей.
Известно устройство покачивания штанг автооператором гальванической линии, содержащее блок управления автооператором (АО) и блок датчиков позиции, состоящий из датчика верхнего датчика нижнего положения захватов автооператора [1] .
Недостатком устройства является то, что оно не обеспечивает регулировку высоты покачивания штанг автооператором (АО). В данном устройстве высота покачивания задается в пределах высоты ванны в зависимости от установки датчиков нижнего и верхнего положения захватов АО. Это приводит к снижению производительности гальванической линии при смене типа и количества обрабатываемых деталей, закрепленных на катодных штангах гальванических ванн.
Наиболее близким по технической сущности к завляемому техническому решению является устройство покачивания штанг автооператором гальванической линии, содержащее блок управления автооператором, блок покачивания штанг автооператором и блок датчиков позиции, в котором между датчиками верхнего и нижнего положения захватов автооператора установлен промежуточный датчик положения с возможностью перемещения его по вертикали, причем блок управдления автооператором связан с блоком покачивания штанг АО и блоком датчиков позиции [2] .
Данное устройство обеспечивает регулировку высоты покачивания штанг автооператором. При этом максимальную амплитуду (высоту) покачивания задают установкой промежуточного датчика и изменяют путем его перемещения. Однако работы по перемещению промежуточного датчика выполняются вручную оператором гальванической линии. Это требует остановки линии на время наладочных работ, что ведет к снижению производительности линии. Кроме того, наличие дополнительного промежуточного датчика, работающего в условиях воздействия агрессивной среды, ведет к снижению надежности работы гальванической линии, а необходимость выполнения оператором вручную наладочных работ при наличии вредных испарений ухудшает удобства ее эксплуатации.
Целью изобретения является повышение производительности гальванической линии за счет сокращения времени переналадки линии.
Поставленная цель достигается тем, что в устройстве покачивания штанг автооператором гальванической линии, содержащем блок управления автооператором (АО) и блок датчиков позиции, включающий в себя датчик верхнего положения захватов АО и датчик нижнего положения захватов АО, согласно изобретению, блок датчиков позиции снабжен элементом ИЛИ и задатчиком амплитуды покачивания, три входа которого являются соответственно первым, вторым и третьим входами блока датчиков позиции, соединенными с одноименными выходами блока управления АО, а выход задатчика подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом датчика верхнего положения захватов АО, причем выход элемента ИЛИ является первым выходом блока датчиков позиции, соединенным первым входом блока управления АО, а выход датчика нижнего положения захватов АО является вторым выходом блока датчиков позиции, подключенным к второму входу блока управления АО.
Введение в блок датчиков позиции устройства покачивания штанг автооператором элемента ИЛИ и задатчика амплитуды покачивания в совокупности с подключением их к другим элементам устройства, как указано, позволяет сократить время на переналадку гальванической линии при необходимости изменения высоты покачивания в зависимости от типа и количества обрабатываемых деталей, т. е. повышает производительность гальванической линии.
Заявляемое устройство покачивания штанг автооператором гальванической линии обладает новизной по сравнению с прототипом, отличаясь от него тем, что в блок датчиков позиции данного устройства введены элементы ИЛИ и задатчик амплитуды покачивания в совокупности с подключением их к другим элементам устройства, как указано.
Другие аналогичные технические решения, обладающие такими же существенными отличительными признаками и дающие такой же положительный эффект, заявителю не известны, поэтому он считает, что заявляемое устройство покачивания штанг автооператором оладает существеными отличиями.
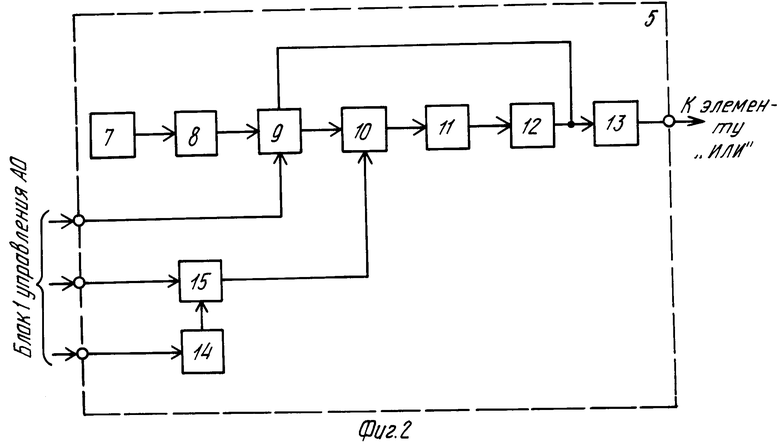
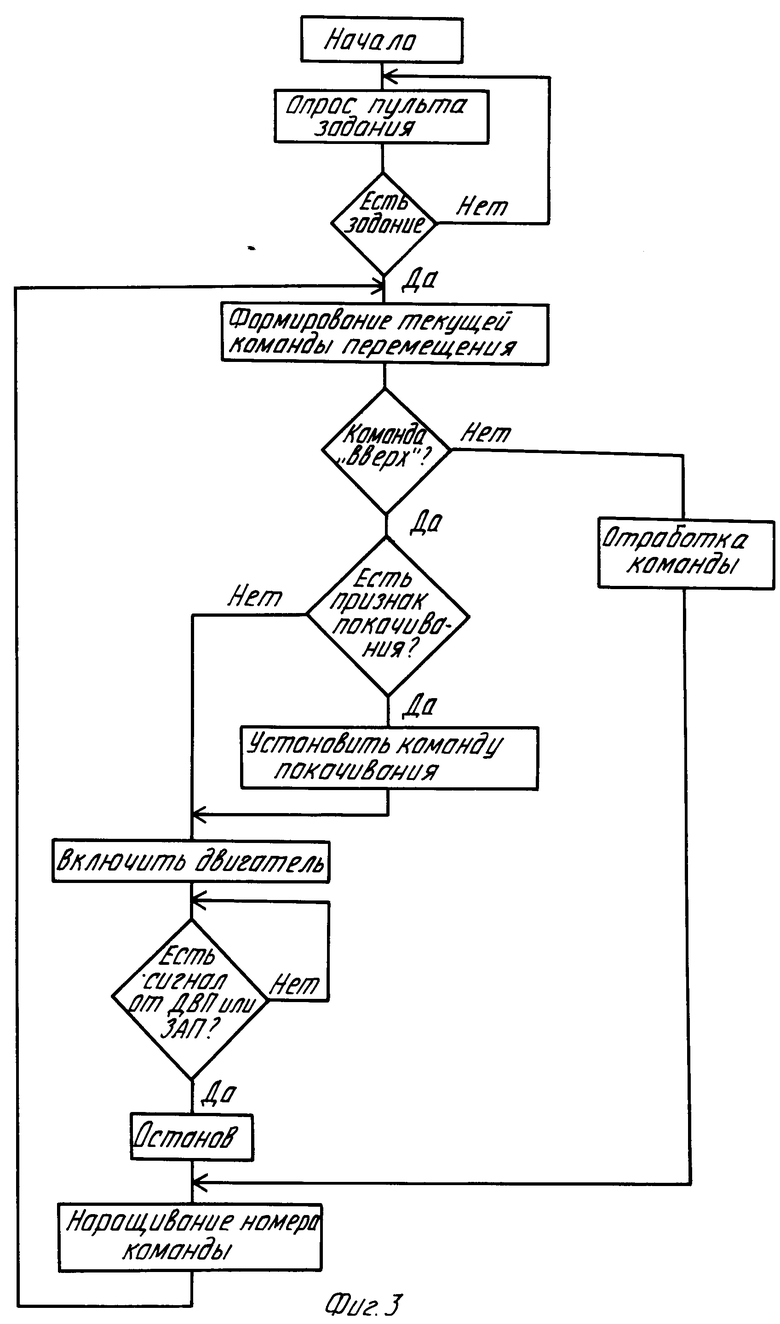
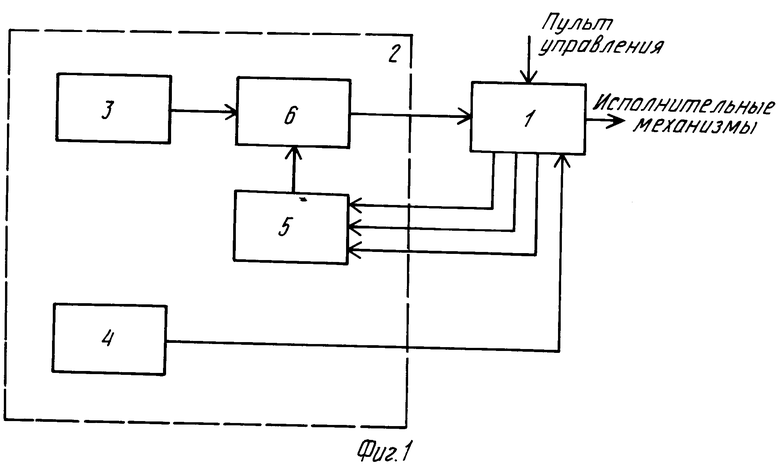
На фиг. 1 показана функциональная схема устройства покачивания штанг автооператором гальванической линии; на фиг. 2 - функциональая схема задатчика аимплитуды покачивания; на фиг. 3 - циклограмма работы блока управления автооператором.
Устройство покачивания штанг (см. фиг. 1) содержит блок 1 управления АО и блок 2 датчиков позиции.
Первый и второй входы блока 1 управления АО соединены соответственно с первым и вторым выходами блока 2 датчиков позиции.
Третий вход блока 1 управления АО является входом устройства и подключен к пульту задания программ (на фиг. 1 не показан).
Первый, второй и третий выходы блока 1 управления АО соединены соответственно с первым, вторым и третьим входами блока 2 датчиков позиции.
Четвертый выход блока 1 является выходом устройства и подключен к исполнительным механизмам.
Назначение и выполнение блоков, входящих в устройство покачивания штанг автооператором, следующее.
Блок 1 управления АО служит для управления исполнительными механизмами автооператора по сигналам с блока 2 датчиков позиции.
В качестве блока 1 управления АО используется блок управления, выпускаемый Ярославским машиностроительным заводом по техническим условиям ГГМО. 124.002 ТУ в комплекте с гальванической линией АГ-42.
Блок 2 датчиков позиции обеспечивает выдачу сигналов на останов катодной штанги АО с обрабатываемыми деталями в нижнем или верхнем положениях, а также осуществляет выдачу сигналов на останов штанги АО при ее покачивании.
Блок 2 датчиков позиции (см. фиг. 1) содержит датчик 3 верхнего положения захватов АО, датчик 4 нижнего положения захватов АО, задатчик 5 амплитуды покачивания и элемент ИЛИ 6.
Первый, второй и третий входы задатчика 5 амплитуды покачивания являются соответственно первым, вторым и третьим входами блока 2 датчиков позиции.
Выход задатчика 5 соединен с первым входом элемента ИЛИ, второй вход которого подключен к выходу датчика 3 верхнего положения захватов АО.
Выход элемента ИЛИ 6 является первым выходом блока 2 датчиков позиции.
Выход датчика 4 нижнего положения захватов АО является вторым выходом блока 2 датчиков позиции.
Датчик 3 верхнего и датчик 4 нижнего положений захватов АО обеспечивает выдачу сигнала при достижении катодной штангой с обрабатываемыми деталями соответственно крайнего верхнего и крайнего нижнего положений гальванической ванны.
В качестве датчиков 3 и 4 используются бесконтактные путевые выключатели типа КВД-6, описанные в книге П. И. Виленского и Л. А. Срибнера. Бесконтактные путевые выключатели. М. : Энергоатомиздат, 1985, с. 47.
Задатчик 5 амплитуды покачивания обеспечивает в режиме покачивания выдачу сигнала при достижении катодной штангой с деталями заданной высоты.
Задатчик 5 (см. фиг. 2) содержит последовательно соединенные генератор 7 импульсов, преобразователь 8 уровня, элемент 3И-НЕ 9, счетчик 10, дешифратор 11, коммутатор 12 и инвертор 13 и соединенные последовательно со счетчиком 10 инвертор 14 и элемент 2И-НЕ 15. При этом второй вход элемента 3И-НЕ 9 является первым входом задатчика 5. Вход инвертора 14 и первый вход элемента 2И-НЕ 15 являются соответственно вторым и третьим входами задатчика 5. Выход коммутатора 12 соединен с третьим входом элемента 3И-НЕ 9, а выход инвертора 13 является выходом задатчика 5.
Генератор 7 импульсов предназначен для формирования последовательности импульсов частотой 2 Гц и выполнен по схеме, описанной в журнале "Радио", 1984 г. , N 5, стр. 39, рис. 18.
Преобразователь 8 уровня служит для согласования уровней выходного напряжения генератора 7 с выходным напряжением элемента 3И-НЕ 9 и выполнен на микросхеме типа 176 ПУ 4 (см. Популярные цифровые микросхемы. Справочник. В. Л. Шило, М. , "Радио и связь", 1987 г. ).
Элемент 3И-НЕ 9 предназначен для пропускания сигналов с генератора 7 на счетчик 10 при наличии разрешающих сигналов (логическая "1") на ее втором и третьем входах соответственно с первого входа задатчика 5 и выхода коммутатора 12. Элемент 3И-НЕ 9 выполнен на микросхеме типа К555 ЛА7 (см. Справочник. Цифровые и аналоговые интегральные микросхемы. Под ред. С. В. Якубовского, М. : Радио и связь, 1989 г. , стр. 48).
Счетчик 10 предназначен для подсчета импульсов, поданных на его первый вход с выхода элемента 3И-НЕ 9, и подачи выходного сигнала в виде двоичного кода на вход дешифратора 11. Счетчик 10 представляет собой четырехразрядный двоичный счетчик, выполненный на микросхеме типа К555 ИЕ5, описанной в книге В. Л. Шило. Популярные цифровые микросхемы. Челябинск: Металлургия, 1989, с. 83. Разрядные выходы "0. . . 3" данного двоичного счетчика являются выходом счетчика 12.
Дешифратор 11 предназначен для преобразования двоичного кода, поступающего на его вход с выхода счетчика 10, в сигнал логического "0" в том выходном канале, десятичный номер которого соответствует двоичному коду. Дешифратор 11 выполнен на микросхеме типа К555 ИД6, описанной в книге В. Л. Шило. Популярные цифровые микросхемы. Челябинск: Металлурия, 1989, с. 135. Входы АО. . . А3 данной схемы являются каналами входа дешифратора 11, а десятичные выходы 1. . . 9 этой схемы образуют каналы выхода дешифратора.
Коммутатор 12 предназначен для задания высоты подъема катодной штанги с обрабатываемыми деталями в режиме покачивания и формирования запирающего сигнала (логический "0") на третьем входе элемента 3И-НЕ 9. В качестве коммутатора 12 используется переключатель типа П2Г-3 (10П 1Н) на 10 положений и одно направление, выпускаемый по техническим условиям ЦЭО. 360.016 ТУ. Контакты 1. . . 9 переключателя, образующие вход коммутатора 12, соединены с соответствующими десятичными выходами 1. . . 9 дешифратора 11.
Инвертор 13 служит для формирования сигнала (логическая "1") на выходе задатчика 5 при достижении заданной высоты покачивания и выполнен на микросхеме типа К555 ЛН1 (см. Справочник. Цифровые и аналоговые интегральные микросхемы. Под ред. С. В. Якубовского. М. : Радио и связь, 1989, с. 47).
Инвертор 14 служит для формирования разрешающего сигнала (логическая "1") на втором входе элемента 2И-НЕ 15 для прохождения сигнала с третьего входа задатчика 5 на второй вход счетчика 10 и выполнен на микросхеме типа К555 ЛН1 (см. Справочник. Цифровые и аналоговые интегральные микросхемы. Под ред. С. В. Якубовского. М. : Радио и связь, 1989, стр. 47).
Элемент 2И-НЕ 15 предназначен для формирования разрешающего счет сигнала (логический "0") на втором входе счетчика 10 и выполнен на микросхеме типа К555 ЛА3 (счм. Справочник. Цифровые и аналоговые интегральные микросхемы. Под ред. С. В. Якубовского. М. : Радио и связь, 1989, с. 47).
Элемент ИЛИ 6 предназначен для пропускания сигналов "1", появляющихся на одном из его входов. Элемент 6 выполнен на микросхеме типа К155 ЛЕ2 (см. Справочник. Цифровые интегральные микросхемы. Под ред. С. В. Якубовского. М. : Радио и связь, 1989, с. 48).
Устройство покачивания штанг автооператором гальванической линии работает следующим образом.
В исходном состоянии при включении питания устройства в пульте управления вырабатывается сигнал установки захватов автооператора в исходное положение, а именно в верхнее над ваннами положение. Этот сигнал через блок 1 управления АО, с его четвертого выхода, поступает на исполнительные механизмы АО и устанавливает захваты АО в верхнее положение.
В блоке 2 датчиков позиции при подаче питания происходит следующее.
Генератор 7 импульсов начинает формировать последовательность импульсов с частотой 2 Гц, которые, пройдя через преобразователь 8 уровня, поступают на первый вход элемента 3И-НЕ 9.
Так как единичные сигналы на первых трех выходах блока 1 управления АО отсутствуют, то и на всех трех входах задатчика 5 блока 2 нулевой сигнал. Значит на втором входе элемента 3И-НЕ 9 нулевой сигнал и данный элемент закрыт для прохождения импульсов с выхода генератора 7 на первый вход счетчика 10. На первом и втором входах элемента 2И-НЕ 15 присутствуют соответственно сигналы логического "0" и "1". На выходе элемента 2И-НЕ 15 появляется сигнал логической "1", который приходит на второй вход счетчика 10 и является сигналом сброса и запрета счета. На выходе счетчика 10, а значит, и на входе дешифратора 11 присутствуют сигналы логического "0". На десятичных выходах 1. . . 9 дешифратора 11 - сигналы логической "1". Через коммутатор 12 сигнал "1" приходит на третий вход элемента 3И-НЕ 9 и на инвертор 13. Тогда на выходе инвертора 13 появляется логический "0", который приходит на первый вход элемента ИЛИ 6.
На выходе датчика 4 нижнего положения захватов АО присутствует сигнал логического "0", который поступает на второй вход блока 1 управления АО. Так как захваты АО установлены в верхнее положение, то срабатывает датчик 3 верхнего положения захватов АО и синал "1" с выхода датчика 3 поступает на второй вход элемента ИЛИ 6. При этом на выходе элемента ИЛИ 6 формируется сигнал "1", который поступает на первый вход блока 1 управления АО.
Перед началом работы в автоматическом режиме оператор в соответствии с выбранным технологическим процессом, количеством и типом обрабатываемых деталей задает высоту покачивания катодной штанги АО. Для этого оператор устанавливает ручку коммутатора 12 задатчика 5 в соответствующее положение.
Таким образом, устройство подготавливается для работы в автоматическом режиме.
Работа в заданном автоматическом режиме начинается по сигналу "Пуск" с пульта управления. При этом синхронизация всех шагов, таких как спуск АО, покачивание и подъем осуществляются с помощью импульсов (сигнал "1"), вырабатываемых в блоке 1 управления АО (см. циклограмму на фиг. 3).
Дальнейшая работа устройства происходит следующим образом.
Блок 1 управления АО в соответствии с технологическим процессом вырабатывает команду "Вниз". Сигнал "1", соответствующий этой команде, поступает на исполнительные механизмы и с второго выхода блока 1 на второй вход задатчика 5 блока 2 датчиков позиции. Захваты автооператора начинают опускаться до тех пор, пока не сработает датчик 4 нижнего положения захватов АО. При этом датчик 3 верхнего положения захватов АО отключается. Таким образом, сигнал "1" с выхода датчика 3 снимается, а на выходе датчика 4 сигнал "1" появляется.
В задатчике 5 с приходом сигнала "1" на его второй вход, а именно на вход инвертора 14, на втором входе элемента 2И-НЕ 15 появляется сигнал логического "0". Но на выходе элемента 2И-НЕ 15 сохраняется сигнал "1", т. к. на первом его входе остается сигнал "0". Не меняется состояние и других элементов задатчика 5.
На первом входе элемента ИЛИ 6 сохраняется сигнал "0" с выхода задатчика 5, а на втором входе элемента ИЛИ 6 с выхода датчика 3 появляется сигнал "0". Таким образом, на выходе данного элемента, а значит, на первом выходе блока 2 формируется сигнал "0", который приходит на первый вход блока 1. При этом на втором входе блока 1 с выхода датчика 4 появляется сигнал "1".
Далее блок 1 вырабатывает команды "Вверх" и "Покачивание", а команда "Вниз" снимается. Сигнал "1", соответствующий команде "Вверх", с первого выхода блока 1 поступает на второй вход элемента 3И-НЕ 9 и с четвертого выхода блока 1 на исполнительные механизмы АО. Последние срабатывают и начинается подъем захватов АО. Сигналом "1" элемент 3И-НЕ 9 открывается. Одновременно с этим сигнал "1", соответствующий команде "Покачивание", поступает на первый вход элемента 2И-НЕ 15. Так как команда "Вниз" блоком 1 снята, на входе и выходе инвертора 14 появляются соответственно сигналы "0" и "1". Сигнал "1" с выхода инвертора 14 приходит на второй вход элемента 2И-НЕ 15, а т. к. на его первом входе также сигнал "1", то на выходе элемента 2И-НЕ 15 появляется сигнал "0". С выхода элемента 2И-НЕ 15 сигнал "0" приходит на второй вход счетчика 10, открывая его для подсчета импульсов, которые поступают на его первый вход с выхода генератора 7 через преобразователь 8 и элемент 3И-НЕ 9.
Счетчик 10 начинает заполняться до тех пор, пока на его выходе не сформируется четырехразрядный двоичный код, который преобразуется дешифратором 11 в сигнал "0" на том из выходов "1. . . 9" дешифратора 11, который соответствует установленному положению ручки коммутатора 12. Этот сигнал "0" через коммутатор 12 поступает на третий вход элемента 3И-НЕ 9, закрывая его для прохождения импульсов с генератора 7 на первый вход счетчика 10. Пройдя инвертор 13, сигнал "0" с выхода коммутатора 12 превращается в сигнал "1", который поступает на первый вход элемента ИЛИ 6. Так как на втором входе элемента ИЛИ 6 с выхода датчика 3 присутствует сигнал "0", то на выходе данного элемента формируется сигнал "1", поступающий на первый вход блока 1 управления АО.
Для блока 1 сигнал "1" на данном входе свидетельствует о нахождении захватов АО в верхнем положении, в результате чего блок 1 выдает команду на исполнительные механизмы и захваты АО останавливаются. После этого в соответствии с циклограммой (см. фиг. 3) блок 1 формирует команду на опускание захватов АО - "Вниз", снимая команды "Вверх" и "Покачивание". При этом сигнал "1" с первого и третьего выходов блока 1 снимаются, а на втором выходе его сигнал "1" появляется. Значит сигнал "0" появляется на втором входе элемента 3И-НЕ 9 и первом входе элемента 2И-НЕ 15, а на входе инвертора 14 появляется сигнал "1", что обеспечивает сигнал "0" на втором входе элемента 2И-НЕ 15. Тогда на выходе элемента 2И-НЕ 15 формируется сигнал "1", который поступает на второй вход счетчика 10. Счетчик 10 устанавливается в "ноль". На выходах 1. . . 9 дешифратора 11 появляется сигнал "1", который через коммутатор 12 приходит на третий вход элемента 3И-НЕ 9 и через инвертор 13 сигналом "0" поступает на первый вход элемента ИЛИ 6. На выходе элемента ИЛИ 6 формируется сигнал "0", поступающий на первый вход блока 1 управления АО. Следовательно, схема задатчика 5 вернулась в исходное положение.
При этом блок 1 вырабатывает команду на исполнительные механизмы и захваты АО опускаются до момента срабатывания датчика 4 блока 2 датчиков позиции.
При необходимости повторного покачивания катодных штанг автооператором работа устройства повторяется.
Далее, в соответствии с циклограммой, блок 1 управления АО формирует команду "Вверх", которая поступает на исполнительные механизмы и появляется сигналом "1" на первом выходе блока 1. Команда "Вниз" снимается. При этом захваты АО начинают подниматься до момента срабатывания датчика 3 верхнего положения захватов АО блока 2.
В блоке 2 сигнал "1" поступает на второй вход элемента 3И-НЕ 9. Данный элемент открывается для прохождения импульсов с выхода генератора 7 через преобразователь 8 уровня на первый вход счетчика 10. На так как на втором входе счетчика 10 с выхода элемента 2И-НЕ 15 присутствует сигнал "1", то счетчик 10 закрыт для счета данных импульсов. Состояние выхода счетчика 10 не меняется, а значит, не меняется и состояние на выходе инвертора 13, где по-прежнему присутствует сигнал "0".
Таким образом, отработав заданную программу обработки изделий в ванне, устройство возвращается в исходное положение и готово к выполнению следующей программы.
При выполнении новой технологической программы обработки следующего типа и количества деталей, когда необходима другая высота покачивания катодной штанги, оператору достаточно перевести ручку коммутатора 12 блока 2 в соответствующее данной высоте положения. Работа устройства будет происходить аналогичным образом.
При отсутствии необходимости покачивания обрабатываемых деталей положение ручки коммутатора 12 блока 2 может не изменяться, т. к. в данном случае блок 1 управления АО не вырабатывает команду "Покачивание". Задатчик 5 не влияет на работу блока 2 и устройства покачивания штанг автооператором в целом. При этом происходит следующее.
Формируя в соответствии с циклограммой данного технологического процесса команды "Вниз" и "Вверх", блок 1 выдает сигналы "1" на второй, затем на первый входы задатчика 5. Тогда в первом случае (команда "Вниз") сигнал "1", пройдя инвертор 14, приходит сигналом "0" на второй вход элемента 2И-НЕ 15. На выходе элемента 2И-НЕ 15 состояние не меняется, т. е. задатчик 5 остается в исходном положении.
С приходом команды "Вверх", т. е. с появлением сигнала "1" на втором входе 3И-НЕ 9, последний открывается для прохождения импульсов с выхода генератора 7 на первый вход счетчика 10. Но на втором входе счетчика 10 присутствует обнуляющий сигнал "1" с выхода элемента 2И-НЕ 15 и счетчик 10 заблокирован для счета. Значит на выходе состояние счетчика 10 остается без изменений, следовательно на выходе задатчика 5 по-прежнему присутствует сигнал "0".
Таким образом, задатчик 5 блока 2 датчиков позиции включается в работу данного устройства только при необходимости обеспечения покачивания деталей в ванне обработки.
Заявляемое устройство покачивания штанг автооператором гальванической линии в сравнении с прототипом позволяет повысить производительность гальванической линии за счет сокращения времени переналадки линии. При необходимости изменения высоты покачивания штанг с обрабатываемыми деталями оператору гальванической линии достаточно переключить ручку коммутатора 12 задатчика 5 в соответствующее положение. Кроме того, исключение дополнительного промежуточного датчика в блоке 2 датчиков позиции, работающего в условиях воздействия агрессивной среды, ведет к повышению надежности работы гальванической линии, а также исключает необходимость выполнения оператором вручную работ по установке и закреплению данного дополнительного датчика при наличии вредных испарений, что улучшает удобство эксплуатации линии. (56) 1. Авторское свидетельство СССР 1229238, кл. C 25 D 21/12, 1984.
2. Авторское свидетельство СССР N 1247436, кл. C 25 D 21/12, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими линиями | 1990 |
|
SU1805448A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| МОНИТОР ДЫХАНИЯ | 1991 |
|
RU2005410C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2054223C1 |
| Устройство управления автооператорами автоматических линий обработки деталей в жидкостях | 1985 |
|
SU1247436A1 |
| РЕГУЛЯТОР ОСВЕЩЕННОСТИ | 1995 |
|
RU2117417C1 |
| ЭЛЕКТРОННЫЙ ТАЙМЕР-ЗАДАТЧИК РИТМА | 1992 |
|
RU2012028C1 |
| УСТРОЙСТВО ТЕЛЕСИГНАЛИЗАЦИИ | 1991 |
|
RU2029378C1 |
| ЛИНИЯ ДЛЯ МЕТАЛЛИЗАЦИИ ПЕЧАТНЫХ ПЛАТ | 1990 |
|
RU1757432C |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ-МАХОВИКОМ | 1980 |
|
SU1840113A1 |
Использование: гальванические линии для интенсификации гальванохимической обработки деталей. Сущность изобретения: с целью повышения производительности гальванической линии устройство покачивания штанг автооператором содержит блок управления автооператором блок датчиков позиций, включающий датчик верхнего положения, датчик нижнего положения, задатчик амплитуды покачивания и элемент ИЛИ, при этом три входа задатчика соединены с одноименными выходами блока управления автооператором, выход задатчика подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом датчика верхнего положения захватов автооператора, причем выход элемента ИЛИ соединен с первым входом блока управления, а выход датчика нижнего положения захватов подключен к второму входу блока управления. 3 ил.
УСТРОЙСТВО ПОКАЧИВАНИЯ ШТАНГ АВТООПЕРАТОРОМ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ, содержащее блок управления автооператором и блок датчиков позиции, включающий в себя датчик верхнего положения захватов автооператора и датчик нижнего положения захватов автооператора, отличающееся тем, что, с целью повышения производительности гальванической линии за счет сокращения времени переналадки линии, блок датчиков позиции выполнен с элементом ИЛИ и задатчиком амплитуды покачивания с тремя входами, которые соединены с одноименными выходами блока управления автооператором, выход задатчика подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом датчика верхнего положения захватов автооператора, причем выход элемента ИЛИ соединен с первым входом блока управления автооператором, а выход датчика нижнего положения захватов автооператора подключен к второму входу блока управления автооператором.
