Предложенное устройство для управления электродвигателем-маховиком относится к области электротехники и может быть использовано для создания управляющих и стабилизирующих моментов при управлении космическим летательным аппаратом (КЛА).
Известные устройства [1, 2, 3] формирования динамического момента с использованием электродвигателей-маховиков можно разделить условно на две большие группы. К первой группе относятся устройства [1, 3] косвенного формирования динамического момента, когда формируется электромагнитный момент, а динамический момент определяется из условия
Mд=МЭМ±HС,
где Mд, МЭМ, МС - соответственно динамический, электромагнитный и момент сопротивления вращению электродвигателя-маховика.
Такой способ формирования динамического момента отличается простотой схемных решений, надежностью, но имеет невысокую точность формирования динамического момента вследствие не учета момента сопротивления. Момент сопротивления вращению имеет две составлявшие: статический момент сухого трения и момент, нелинейно зависящий от скорости вращения. Вторая составляющая момента сопротивления в основном обусловлена вентиляционными потерями и потерями от вихревых токов, имеет нелинейную зависимость от скорости вращения и условий эксплуатации (температура, состав и давление окружающей среды, старение), поэтому точное формирование динамического момента в устройствах подобного типа невозможно. Путем подбора специальных подшипников, смазки и вакуумирования электродвигателя-маховика возможно создавать устройства с точностью формирования динамического момента порядка 8-15%.
Вторая группа устройств непосредственного формирования динамического момента отличается тем, что используются различные устройства измерения динамического момента. Устройства измерения динамического момента, как правило, основаны на измерении упругих деформаций, сложны, нестабильны во времени и при изменении условий эксплуатации требуют специальной конструкции всего устройства и тренировки [4].
Известно устройство [2] (прототип), в котором осуществлено непосредственное формирование динамического момента. Устройство состоит из электродвигателя-маховика, регулятора скорости, датчика скорости и цифрового устройства задания скорости вращения электродвигателя-маховика. Сигнал управления по двухпроводной линии (раздельно для формирования положительного и отрицательного моментов) поступает на вход цифрового задатчика скорости, который представляет собой цифровой интегратор, выход которого через цифроаналоговый преобразователь присоединен ко входу регулятора скорости. Основное достоинство - возможность независимого формирования ускорения вращения электродвигателя-маховика. При постоянном моменте инерции (J) имеем  поэтому теоретически возможно формирование динамического момента с высокой точностью. Однако практически точность формирования динамического момента определяется переходными процессами в регуляторе скорости и требует применения датчика скорости с высокой разрешающей способностью, бесконтактного. Другим недостатком устройства является слабая помехозащищенность. Дело в том, что задатчик скорости - цифровой интегратор - имеет свойство интегрировать не только полезный сигнал, но и сигналы помех, т.е. происходит процесс накопления ошибки. В условиях непрерывной работы устройства эта ошибка может достигать значительных величин.
поэтому теоретически возможно формирование динамического момента с высокой точностью. Однако практически точность формирования динамического момента определяется переходными процессами в регуляторе скорости и требует применения датчика скорости с высокой разрешающей способностью, бесконтактного. Другим недостатком устройства является слабая помехозащищенность. Дело в том, что задатчик скорости - цифровой интегратор - имеет свойство интегрировать не только полезный сигнал, но и сигналы помех, т.е. происходит процесс накопления ошибки. В условиях непрерывной работы устройства эта ошибка может достигать значительных величин.
Целью предлагаемого устройства является повышение точности формирования динамического момента и помехоустойчивости устройства управления электродвигателем-маховиком.
Поставленная цель достигается тем, что в устройство введена цифровая схема коррекции момента, состоящая из схемы управления, двух ключей, инвертора, шести двухвходовых схем "2И-НЕ", двух схем "3И-НЕ", двух "n"-разрядных реверсивных счетчиков, двух "n+1" канальных мультиплексоров, "n+1" разрядного регистра, сумматора по модулю два, цифроаналогового преобразователя, схемы сравнения, схемы ограничения и сумматора, причем первые входы схемы сравнения и сумматора объединены и присоединены к входу управления моментом, выход сумматора присоединен к управляющему входу регулятора тока фаз двигателя, второй вход сумматора присоединен к выходу схемы ограничения, вход которой присоединен к выходу схемы сравнения, второй вход которой присоединен к выходу вышеупомянутого цифроаналогового преобразователя, цифровые входы которого присоединены к выходам "n+1" разрядного регистра, "n"-разрядов которого через соответствующие каналы двух мультиплексоров присоединены к соответствующим выходам двух "n"-разрядных реверсивных счетчиков, а знаковый разряд регистра через соответствующие каналы мультиплексоров присоединен к выходам пятой и шестой схем "2И-НЕ", счетные входы реверсивных счетчиков через соответствующие ключи присоединены к первому выходу импульсного датчика скорости, управляющие входы вышеупомянутых ключей присоединены к второму и пятому выходу схемы управления, на которых формируются сигналы запрета счета соответственно первого и второго реверсивного счетчика, первый выход схемы управления присоединен ко входу инвертора, первому входу второй схемы "3И-НЕ", к первому входу шестой схемы "2И-НЕ" и к управляющему входу второго мультиплексора, выход, инвертора присоединен к первому входу первой схемы "3И-НЕ", к первому входу пятой схемы "2И-НЕ" и к управляющему входу первого мультиплексора, третий выход схемы управления присоединен к управляющему входу "запись" регистра, четвертый выход схемы управления присоединен к "R"-входу первого реверсивного счетчика и ко второму входу третьей схемы "2И-НЕ", шестой выход схемы управления присоединен к "R" - входу второго реверсивного счетчика и ко второму входу первой схемы "2И-НЕ", "±1"-знаковый вход первого и второго реверсивного счетчика присоединен и первому входу второй и четвертой схем "2И-НЕ" соответственно и к выходу первой и второй схем "3И-НЕ" соответственно, "Р" - выходы переноса первого и второго реверсивного счетчика присоединены ко вторым входам первой и второй схем "3И-НЕ" соответственно и к первым входам первой и третьей схем "2И-НЕ" соответственно, выходы первой и третьей схем "2И-НЕ" присоединены ко вторым входам второй и четвертой схем "2И-НЕ" соответственно, выходы которых присоединены к третьим входам первой и второй схем "3И-НЕ" соответственно, выход знакового разряда регистра присоединен к первому входу сумматора по модулю два, выход которого присоединен к знаковому входу цифроаналогового преобразователя, а второй вход присоединен к выходу схемы определения направления вращения.
На фиг.1 изображена схема предлагаемого устройства (пунктирной линией выделена и раскрыта отличительная часть), где 1 - схема управления; 2, 3 - ключи; 4 - инвертор; 5, 6 - "n"-разрядные реверсивные счетчики; 7, 8 - логические схемы "3И-НЕ", первая и вторая соответственно; 9, 10, 11, 12, 13, 14 - логические схемы "2И-НЕ", с первой по шестую соответственно; 15, 16 - первый и второй "n+1"-канальный мультиплексор; 17 - "n+1"-разрядный регистр, 18 - сумматор по модулю два, 19 - цифроаналоговый преобразователь (ЦАП); 21 - схема ограничения; 20 - схема сравнения; 22 - сумматор; 23 - регулятор тока вентильного двигателя 24; 25 - датчик положения ротора; 26 - импульсный датчик скорости; 27 - схема определения направления вращения.
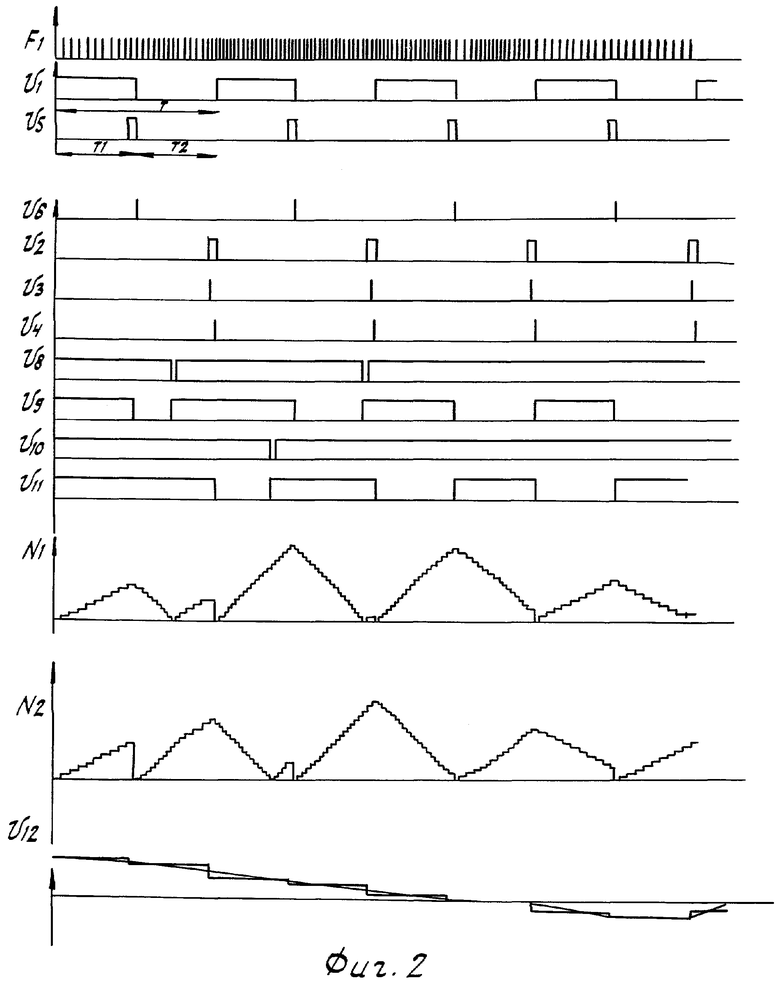
На фиг.2 изображены диаграммы, поясняющие работу предложенного устройства.
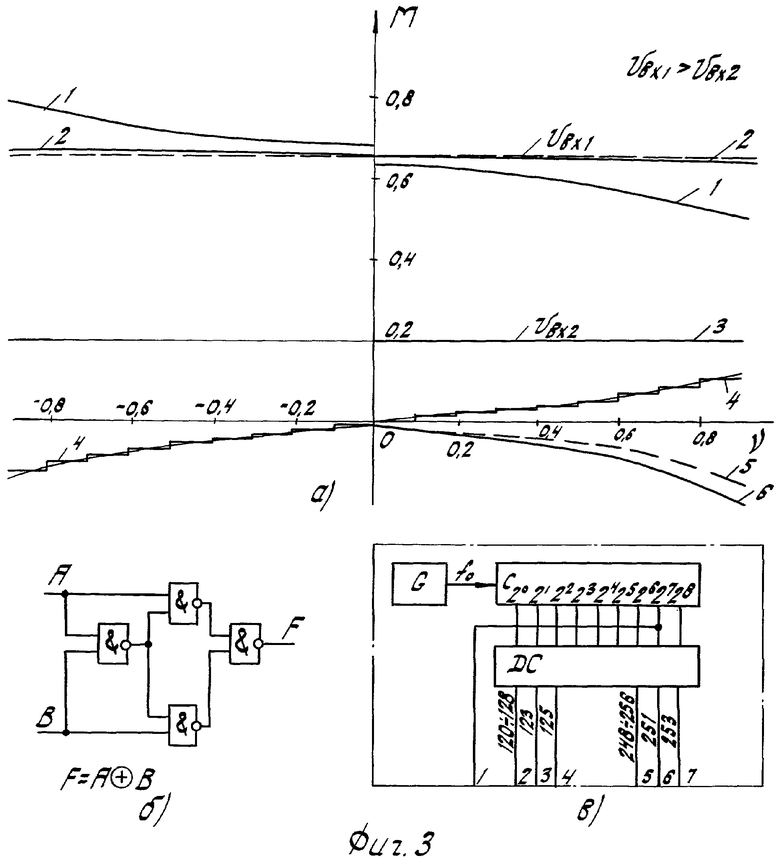
На фиг.3а изображены экспериментально снятые на макете моментно-скоростные характеристики электродвигателя-маховика: кривая 1 - без цифровой схемы коррекции момента и с ней - кривые 2, 3; кривые 5, 6 отражают температурную зависимость момента сопротивления вращению при t=30°С и t=0°С соответственно, ступенчатая кривая 4 соответствует напряжению на выходе схемы сравнения 21 при максимальном входном сигнале управления моментом (при уменьшении входного сигнала число ступенек будет увеличиваться и при Uвх→0, МС→0 число ступеней стремится к бесконечности).
На фиг.3б и 3в показаны примеры технической реализации сумматора по модулю два и схемы управления соответственно. Работа устройства циклична - в течение первой половины цикла счетчик 5 работает на сложение, во вторую часть цикла счетчик 5 работает на вычитание. Длительность интервалов определяет стабильный во времени сигнал U1 с первого выхода схемы управления 1. Перед началом цикла счетчик 5 обнуляется коротким импульсом управления U4 с четвертого выхода схемы управления. Одновременно с обнулением счетчика 5 триггер на схемах 7 и 10 устанавливается в исходное состояние, когда на "±1"-знаковом входе реверсивного счетчика высокий потенциал, обеспечивающий работу счетчика на сложение. В конце цикла работы счетчика сигналом U3 содержимое счетчика переписывается в регистр 17 через мультиплексор 15. Импульс U2 определяет задержку в работе счетчика 5 на время записи его содержимого в регистр. Длительности сигналов U2 и U3 много меньше длительности полуцикла. В первую половину цикла реверсивный счетчик считает импульсы от датчика скорости 26, поступающие через открытый ключ 2 на счетный вход "С" - счетчика. В этот полупериод на "±1"-знаковом входе реверсивного счетчика 5 действует сигнал U9 высокого потенциала, определяющий счет на "суммирование". По окончании первого полупериода импульсом U6 опрокидывается триггер на схемах 7, 10 в результате на "±1"-знаковом входе реверсивного счетчика появится сигнал низкого уровня, определяющий работу счетчика на вычитание. Если в процессе работы на втором полупериоде код счетчика 5 достигает нулевого значения, то на выходе "Р" его появится сигнал переноса низкого уровня, опрокидывающий триггер на схемах 7 и 10 в исходное состояние, и далее счетчик работает на сложение, при этом на выходе схемы 13 в конце периода будет сформирован сигнал низкого уровня, определяющий "положительный" знак записываемого в регистр 17 содержимого счетчика 5. Если в течение второго полупериода код счетчика 5 не достигает нулевого значения, то не наступает переключения триггера на схемах 7 и 10 и в конце периода на выходе схемы 13 формируется сигнал высокого уровня, определяющий "отрицательный" знак записываемого в регистр17 содержимого счетчика 5. "Положительный" и "отрицательный" знак записываемого в регистр числа выбран условно и соответствует двум режимам работы электродвигателя-маховика: разгону и торможению соответственно. Значение знака сигнала на выходе ЦАП формируется схемой сумматора по модулю два (18) в соответствии с таблицей 1.
Реверсивный счетчик 6 работает аналогично реверсивному счетчику 5 с запаздыванием на 1/2 полного цикла работы счетчика 5, поэтому содержимое регистра 17 обновляется на каждом полупериоде работы счетчиков 5 и 6, что увеличивает точность устройства коррекции по сравнению со схемой, имеющей всего один реверсивный счетчик. Вариант технической реализации схемы управления приведен на фиг.3в, где выход генератора (G) стабильной частоты присоединен ко входу 8-разрядного двоичного счетчика (С), выходы которого присоединены ко входам дешифратора (DC), на выходах которого формируются сигналы в соответствии с таблицей 2.
Выходной сигнал ЦАП по величине соответствует изменению скорости вращения двигателя-маховика за один цикл работы счетчиков. При постоянной величине момента инерции двигателя-маховика и длительности цикла сигнал на выходе ЦАП будет соответствовать среднему значению динамического момента на отрезке времени в один цикл. Сигнал, пропорциональный разности напряжения с выхода ЦАП и напряжения управления моментом после схемы ограничения, суммируется с сигналом управления, осуществляя коррекцию системы. В переходном режиме обеспечивается высокое быстродействие устройства управления динамическим моментом аналоговой частью регулятора, максимально возможное влияние цифровой схемы коррекции ограничено схемой 21 на наперед заданном максимально возможном уровне сигнала коррекции, необходимом для обеспечения требуемой точности в установившемся режиме. В установившемся режиме (Uвх=const) точность формируемого динамического момента определяется цифровой схемой коррекции. Так, при максимальной скорости вращения двигателя-маховика, равной 2000 об/мин, Mд.max=0,1H·M; Mк=1,5H·M·C; Mc.max=0,01H·M; Т=4 c; N0=60 имп/об, устройство обеспечивает формирование динамического момента в установившемся режиме с ошибкой, меньшей 1%.
На фиг.2 показаны диаграммы работы устройства, где f - импульсы датчика скорости; U1...U6 - выходные сигналы схемы управления; U8, U10 - сигналы на выходах "Р" переноса реверсивных счетчиков 5 и 6 соответственно; U9, U11 - сигналы на "±1"-знаковых входах реверсивных счетчиков 5 и 6 соответственно; №1 и №2 - диаграммы изменения кодов реверсивных счетчиков; U12 - напряжение на выходе ЦАП.
Таким образом, предлагаемое устройство управления электродвигателем-маховиком позволяет формировать динамический момент в установившемся режиме с точностью и стабильностью, в 5-6 раз большей, чем в устройствах [1, 3], и обеспечивает формирование динамического момента в переходных режимах с точностью устройств [1, 3] при невысокой разрешающей способности импульсного датчика скорости, значительно меньшей, чем требуется для устройства [2]. Предлагаемое устройство обладает более высокой помехоустойчивостью и не накапливает сигналы по сравнению с [2], вследствие цикличности работы цифровой схемы коррекции. Предлагаемое устройство обеспечивает более высокую точность и помехоустойчивость по сравнению с известными устройствами [1, 2, 3] и позволяет реализовать точные характеристики систем управления КЛА, значит и повысит качество и эффективность использования КЛА в народном хозяйстве.
Источники информации
1. Оклер. Усовершенствованный управляющий маховик для систем угловой стабилизации космического объекта. Вопросы ракетной техники, №8, 1970, с. 64-76.
2. Авторское свидетельство СССР №110667.
3. Техническая кибернетика. Устройства и элементы систем автоматического регулирования и управления. Книга 3я. Под редакцией В.В.Солодовникова.- М.: Машиностроение, 1976 г.
4. Логинов В.Н. Электрические измерения механических величин.- М.: Энергия, 1976 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Параллельно-последовательный п-разрядный аналого-цифровой преобразователь с автоматической коррекцией функции преобразования | 1988 |
|
SU1732471A1 |
| Система автоматического управления (ее варианты) | 1985 |
|
SU1260915A1 |
| Вычислительное устройство | 1982 |
|
SU1040493A1 |
| ОДНОКАНАЛЬНЫЙ КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ЧАСТОТНЫХ ИСКАЖЕНИЙ | 2009 |
|
RU2393491C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНЫХ СООБЩЕНИЙ | 1991 |
|
RU2013867C1 |
| Генератор функций | 1984 |
|
SU1241219A1 |
| Цифроаналоговый преобразователь с автокалибровкой | 1989 |
|
SU1683176A1 |
| Преобразователь двоичного кода в двоично-десятичный код угловых единиц | 1986 |
|
SU1349008A2 |
| Цифроаналоговый генератор телевизионного сигнала | 1989 |
|
SU1654978A1 |
Изобретение относится к области электротехники и может быть использовано для создания управляющих и стабилизирующих моментов при управлении космическим летательным аппаратом (КЛА). Технический результат заключается в повышении точности формирования динамического момента и помехоустойчивости устройства управления электродвигателем-маховиком. Для этого устройство содержит датчик положения потока синхронного электродвигателя, импульсный датчик скорости синхронного электродвигателя, схему определения направления вращения, регулятор тока фаз синхронного электродвигателя, а также введена цифровая схема коррекции момента. 3 ил.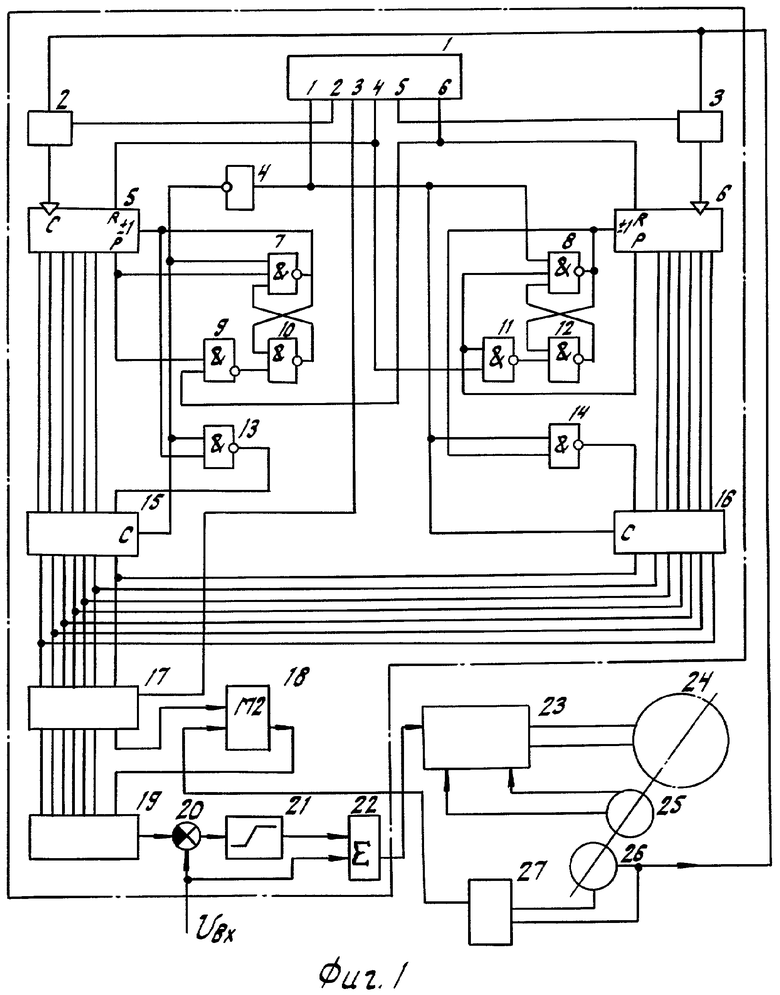
Устройство для управления электродвигателем-маховиком, выполненным на базе синхронного электродвигателя, содержащее датчик положения потока синхронного электродвигателя, импульсный датчик скорости синхронного электродвигателя, схему определения направления вращения и регулятор тока фаз синхронного электродвигателя, отличающееся тем, что, с целью повышения точности управления и помехоустойчивости, в устройство введена цифровая схема коррекции момента, составленная из схемы управления, двух ключей, инвертора, шести схем "2И-НЕ", двух схем "3И-НЕ", двух n-разрядных реверсивных счетчиков, двух "n+1" канальных мультиплексоров, "n+1" разрядного регистра, сумматора по модулю два, цифроаналогового преобразователя, схемы сравнения, схемы ограничения и сумматора, причем первые входы схемы сравнения и сумматора объединены и подключены к входу управления моментом цифровой схемы коррекции момента, выход сумматора подключен к управляющему входу регулятора тока для синхронного электродвигателя, второй вход сумматора подключен к выходу схемы ограничения, вход которой соединен с выходом схемы сравнения, вторым входом подключенной к выходу цифроаналогового преобразователя, цифровые входы которого соединены с выходами "n+1" разрядного регистра, "n" разрядов указанного регистра через соответствующие каналы двух мультиплексоров связаны с соответствующими выходами двух "n" разрядных реверсивных счетчиков, а знаковый разряд регистра через соответствующие каналы указанных мультиплексоров связаны с выходами пятой и шестой схем "2И-НЕ", счетные входы реверсивных счетчиков через ключи присоединены к первому выходу импульсного датчика скорости, управляющие входы ключей соединены с вторым и пятым входами схемы управления соответственно, первый выход схемы управления подключен к входу инвертора, первому входу второй схемы "3И-НЕ", первому входу шестой схемы "2И-НЕ" и к управляющему входу второго мультиплексора, выход инвертора соединен с первым входом первой схемы "3И-НЕ", первым входом пятой схемы "2И-НЕ" и с управляющим входом первого мультиплексора, третий выход схемы управления подключен к управляющему входу "запись" регистра, четвертый выход схемы управления - к "R"-входу первого счетчика и к второму входу третьей схемы "2И-НЕ", шестой выход схемы управления - к "R"-входу второго реверсивного счетчика и к второму входу первой схемы "2И-НЕ", "±1" знаковый вход первого и второго риверсивных счетчиков соединен с первым входом второй и четвертой схем "2И-НЕ" соответственно и с выходом первой и второй схем "3И-НЕ" соответственно, "р"-выходы переноса первого и второго реверсивного счетчика подключены к вторым выходам первой и второй схем "3И-НЕ" соответственно и к первым входам первой и третьей схем "2И-НЕ" соответственно, выходы первой и третьей схем "2И-НЕ" подключены к вторым входам второй и четвертой схем "2И-НЕ", выходы которых соединены с третьим входом первой и второй схем "3И-НЕ" соответственно, выход знакового разряда регистра подключен к первому входу сумматора по модулю два, выходом подключенного к знаковому выходу цифроаналогового преобразователя, а второй вход сумматора по модулю два подключен к выходу схемы определения направления вращения.

