dm dt
О,
- Va, x
i
(6)
,,
а3, Ь, - коэффициенты,
определенные по параметрам вентильного электродвигателя.
в уравнения (6) в матрич
g-A.V(t),
определяют матрицу
(7)
Используя разложение в степенной ряд соответственно (6), определяют матрицу перехода системы НТЙ):
Фор
% А т;
м
(9)
Значение Т0 с учетом производительности вычислителя и искажений управляющих импульсов тиристорными преобразователями избрано 20 мс. Исследованиями установлено, что при аппроксимации систем рассматриваемого класса разностными уравнениями, достаточная точность аппроксимации достигается вторым приближением разложения :
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Вентильный электропривод | 1988 |
|
SU1654960A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| Вентильный электропривод | 2018 |
|
RU2706416C1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
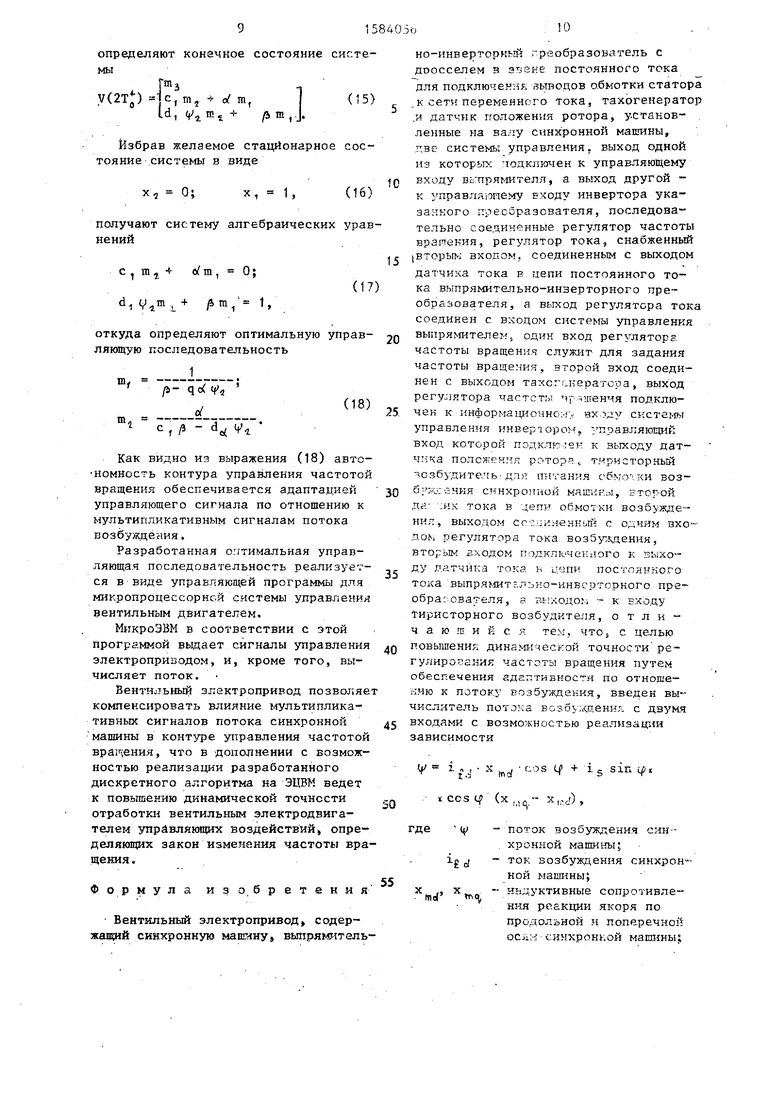
Изобретение относится к электротехнике и может быть использовано в электроприводах испытательных стендов. Целью изобретения является повышение динамической точности регулирования частоты вращения путем обеспечения адаптивности по отношению к потоку возбуждения. С этой целью в вентильный электропривод введен вычислитель 14 потока возбуждения, входами соединенный с выходами датчиков 11, 15 тока в цепи постоянного тока выпрямительно-инверторного преобразователя 3 и цепи обмотки возбуждения синхронной машины 1. Выход вычислителя 14 потока возбуждения подключен к третьему входу регулятора 12 частоты вращения, выполненного дискретным. Это дает возможность компенсировать влияние потока на контур регулирования частоты вращения. 1 ил.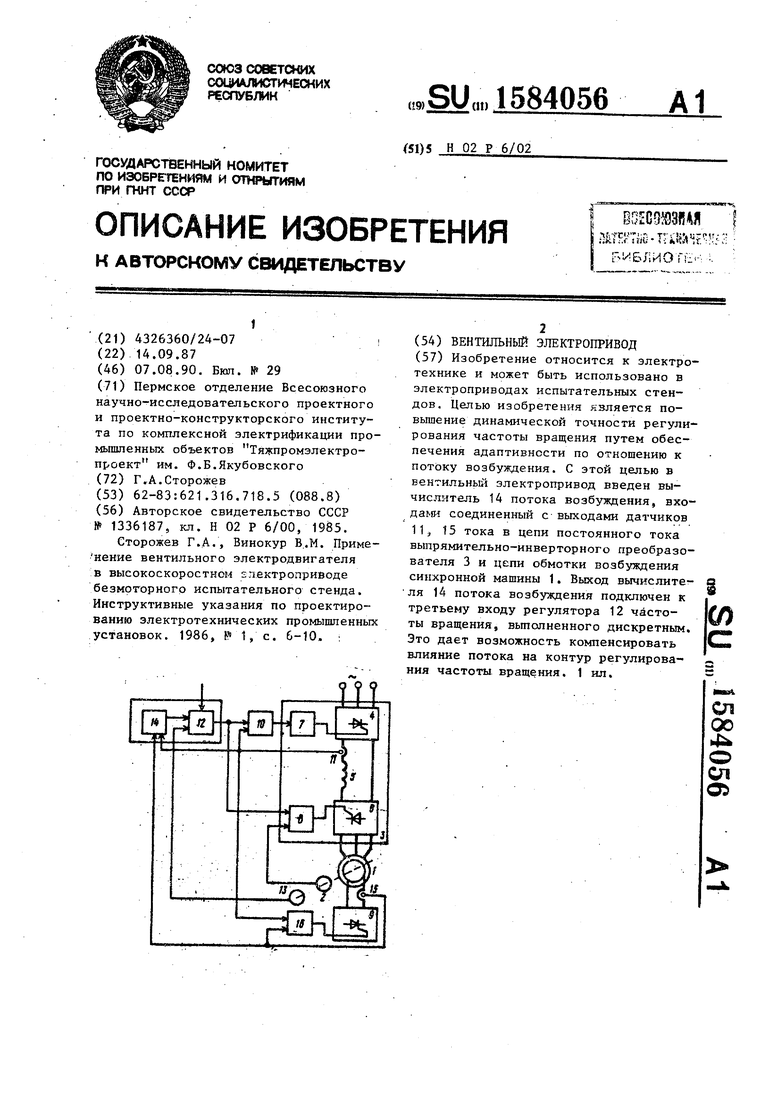
+ AT + &. + А1о 2
где с, , с4, с5,
- dj, d .j - коэффициенты, определенные по ко- эффициентам матрицы А по (8) .
Для определения оптимальной управляющей последовательности с учетом воздействия мультипликативных сигна- лов рассчитывают вектор состояния системы на двух интервалах квантования Т, 2Т, что является достаточным при существующей размерности объекта управления. Определив вектор начальных условий в виде
V (Of) col т; 0; OJ ,
(11)
вычисляют
vert)
тг
+ (о)
ci m, .di V m,.
(12)
Ims c,ml+(k1-kl V,Vt-k , d, m4+(l Va+d V, -1г V, )- т, J,
(13)
где m1} tn2, тэ - управляющая последовательность соответственно порядку шагов квантования; tf , г - измеряемые мультипликативные сигналы на соответствующих шагах квантования;
k7, k,
1,1- - коэффициенты,.определяемые по коэффи- циентам (10) из перемножения матриц. Введя подстановку функций измерения
si k, - k4 V, v,- k4 (,;
/i 11 + d1 v, , Vi ,
(14)
определяют конечное состояние системы
Гпь
Ис, т, -г d
т.
Id, г mt + р т
,1
(15)
Избрав желаемое стационарное состояние системы в виде
0;
1,
(16)
получают систему алгебраических уравнений
с 1 тг + of т, 0;
di Чгт L+ Лт1 1
откуда определяют оптимальную управляющую последовательность
1
/a- qo(
rf
с f / -
(18)
Как видно ич выражения (18) автс- номность контура управления частотой вращения обеспечивается адаптацией управляющего сигнала по отношению к мультипликативным сигналам потока возбуждения.
Разработанная оптимальная управляющая последовательность реалкзуег- ся в виде управляющей программы для микропроцессорной системы управления вентильным двигателем.
МикроЭВМ в соответствии с этой программой выдает сигналы управления электроприводом, и, кроме того, вычисляет поток.
Вентильный электропривод позволяе компенсировать влияние мультипликативных сигналов потока синхронной машины в контуре управления частотой вращения, что в дополнении с возможностью реализации разработанного дискретного алгоритма на ЭЦВМ ведет к повышению динамической точности отработки вентильным электродвигателем управляющих воздействий определяющих закон изменения частоты вращения.
Формула изобретения
Вентильный электропривод, содер жащий синхронную машину, выпрямитель)
10
15
)
20
25
т
30
35
40
45
SO
55
но-инвертоонь Й греобразоьлтель с доосселем в зъгне постоянного тока
для подключения выводов обкотки статора к сети переменного тока, тахогенератор и датчик положения ротора, установленные на ва гу синхронной машины, тт,вс системы управления, выход одной из которых юдклгачен к управляющему входу выпрямителя, а выход другой - к управлА Эпему входу инвертора указанного преобразователя, последовательно соецичрнные регулятор частоты врагекия, регулятор тока, снабженный
Вторыь входом, соединенным с выходом
датчика тока в цепи постоянного тока выпрямительно-инзерторного преобразователя, а выход регулятора тока соединен с входом системы управления выпрямителем, один вход регулятора частоты вращения служит для задания частоты враще ич, второй вход соединен с выходом тахсп,кеоагорз, выход регулятора чагтстьт п,- ,шенчя подключен к информационно системы управления инверторов, правляюций вход которой подKir ег к выходу дат- ччка полсяпч я ротор, т рчсторный озб дитечь для писания чи воз- б. кгзчия синхронной Maffiiirj, тсгой Дг их тока в деп обмо7ки - нил, выходом со „пленный с о,,ним вхо- IDK регулятора тока возбу.кдения, вторь1м вчодом г эдкпючеклюго к заходу датчика тока i епи постплн-юго выпрямит 7 jHo-инв ртсрного пре- обра , a r.t ходо:, - к вхоцу tnpHCTOpHoro возбудителя, о т л и - ч а ю m и и с у те--, что, с целью повышение динамической точности рс- гулиро гния частоты вращения путем обеспечения адаптивности по отноше- лчю к потоку возбуждения, введен вычислитель поточа во .б дпенн:, с двумя входами с возможностью реализации зависимости
Vs i Јj ц + i s sin j«
« cos q (t,,,,,- xrcr) , где -ц)
ЈЈ
X
mot x
возбуждения с.чн - хронной машины
ток возбуждения синхронной машины;
-индуктивные сопротивления реакции якоря по продольной н поперечной ocj. - (.инхронкой машины;
t/ - угол управления тирие- торными ключами выпря- .мительно-инверторного преобразователя} 1у - входной ток инвертора;
регулятор частоты вращения снабжен третьим входом и выполнен дискретным с возможностью реализации на интервалах дискретности зависимостей
m
1 p-q,
cif
где mt, mt - выходные импульсы регулятора частоты для соответствующего интервала дискретности;
Vt потоки возбуждения для соответствующего интервала дискретности;
функции измерения:
С kf-kt itW4- k, Vt , |S- ,, - le VfVt,
где cf, df,
J1§
k ,,
k, - коэффициенты,-определявi
мые параметрами электро- 14 двигателя; при этом указанные входы вычислителя потока возбуждения соединены с выходами датчиков тока, а выход - с третьим входом регулятора частоты вращения.
| Вентильный электродвигатель | 1985 |
|
SU1336187A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сторожев Г.А., Винокур В.М | |||
| Приме- нение вентильного электродвигателя в высокоскоростном спектроприводе безмоторного испытательного стенда | |||
| Инструктивные указания по проектированию электротехнических промышленных установок | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
