Изобретение относится к фотоприемникам, применяемым в приборах ориентации осей космических аппаратов (КА) и приборов, на них установленных, а также в авиационных приборах для осуществления курсовой ориентации самолетов.
Известны приборы ориентации осей космических аппаратов с использованием частотного растра [1] .
В указанном приборе при ширине непрозрачных и прозрачных полос (промежутков) частотного растра h = 0,25 мм ошибка орбитальной ориентации КА по освещенному (дневному) фону земной поверхности составляет Δϕ≈ 3о.
Такая ошибка является нижним допустимым пределом для некоторых задач КА и совершенно недопустима для курсовой ориентации самолетов.
Известен датчик перемещений, используемый для определения координат положения цели в пространстве, в состав которого входит детектор ИК-излучения, представляющий собой составной многоэлементный фотоприемник (ФП), состоящий из n автономных фоточувствительных элементов, выполненных в виде полос, расположенных с каждой стороны от оси симметрии под углом к ней [2] .
Ширина промежутков между фоточувствительными полосками значительно больше ширины фоточувствительных полос, что обуславливает невозможность использования известного "многоэлементного" ФП в приборах курсовой орбитальной и инерциальной ориентации.
Целью изобретения является определение скорости вращения и повышение чувствительности.
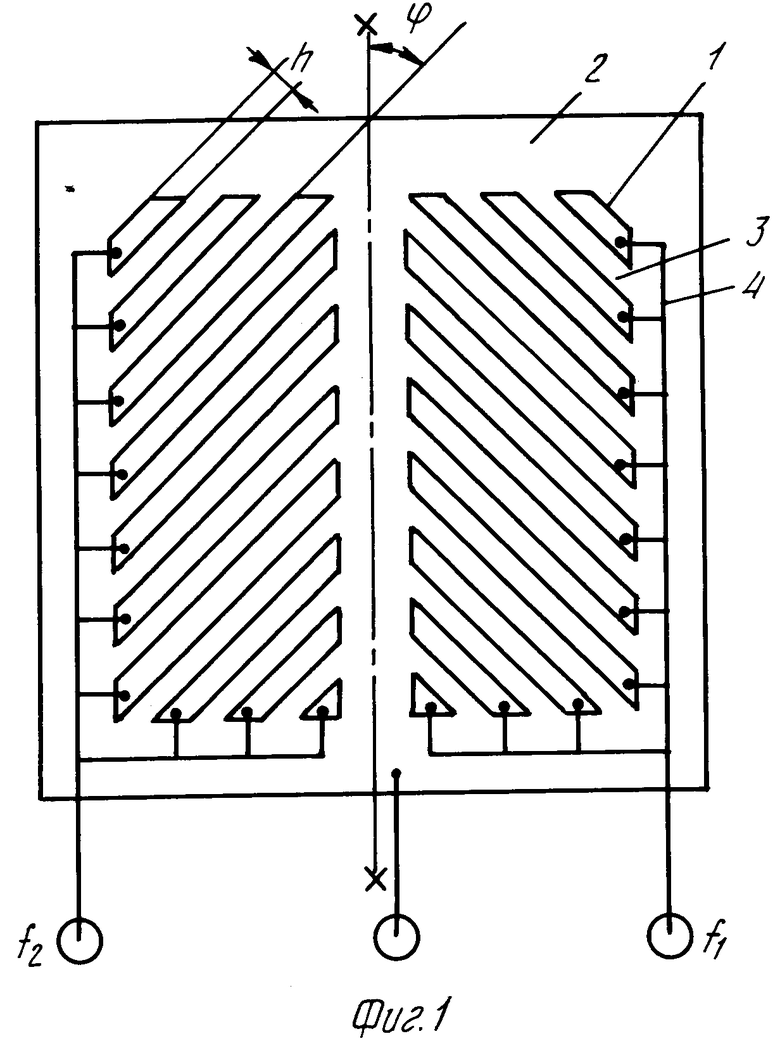
На фиг. 1 - датчик перемещений с параллельным соединением фоточувствительных полос в каждой группе; на фиг. 2 - датчик перемещений с секционированным соединением фоточувствительных полосок с развязывающими диодами, подключенными к каждой секции и его эквивалентная электрическая схема; на фиг. 3 - датчик перемещений с развязывающими диодами, подключенными к каждой фоточувствительной полоске.
Предлагаемый датчик перемещений выполнен в виде автономных фоточувствительных полосок 1, расположенных с каждой стороны от оси симметрии Х под углом ϕ к ней. Полоски 1 нанесены на кремниевую пластину - подложку 2, причем ширина L полосок 1 равна ширине промежутков 3 между ними. Фоточувствительные полоски (ФЧП) 1 могут быть соединены параллельно с шиной 4 непосредственно через развязывающие диоды 5 секционно (фиг. 2) или каждая в отдельности (фиг. 3).
От способа соединения ФЧП 1 между собой в каждом канале зависит пороговая чувствительность частотно-растрового многоэлементного кремниевого фотоприемника (далее РМКФ) в целом, а следовательно, возможность индикации слабых неравномерностей яркости фона, слабых звезд и образования частот f1 и f2.
Так, на фиг. 1 представлено параллельное соединение ФЧП 1 в каждом канале. В этом случае сигнал, выдаваемый каждой ФЧП, нагружен емкостью и сопротивлением всех остальных N - 1 ФЧП 1 в канале. При таком соединении ФЧП между собой пороговая чувствительность РМКФ - наибольшая, а амплитуды частот f1 и f2 - наименьшие. В реальных многоэлементных фотоприемниках N ≥ 100.
На фиг. 2 показано секционированное разделение фоточувствительной поверхности FΣ каждого канала РМКФ - FΣ = nbN, где b - длина одной ФЧП. Число n ФЧП в секции меньше N. В этом случае сигнал, выдаваемый каждой ФЧП в секции, нагружается емкостью и сопротивлением n-1 ФЧП, а не N-1 ФЧП, т. е. нагрузка и шумы в (N-1)/(n-1) раз меньше, а порог чувствительности секции в  раз ниже.
раз ниже.
Наименьшая пороговая чувствительность РМКФ, практически достижимая, обеспечивается при снятии сигналов с каждой ФЧП без параллельной паразитной нагрузки другими ФЧП в каждом канале.
Влияние секций или ФЧП одной на другую исключается введением развязывающих (разделяющих) неосвещенных диодов 5 (фиг. 2, 3).
Частота модуляции светового потока растром определяется параметрами модулирующего частотного растра и скоростью vиз перемещения светового потока вдоль оси Х симметрии частотного растра.
Неравномерность светового потока может быть обусловлена как неравномерностью яркости поверхности Земли, планет, так и звездным фоном небесной сферы.
Если ось Х симметрии частотного растра совпадает с вектором  относительной скорости перемещения яркостного фона земли, планет, звездного фона, то частоты модуляции f1 = f2 = f0 = 1/T, где Т - период перемещения изображения фона в плоскости частотного растра. Период Т связан с параметрами частотного растра и скоростью vиз перемещения изображения фона в плоскости частотного растра
относительной скорости перемещения яркостного фона земли, планет, звездного фона, то частоты модуляции f1 = f2 = f0 = 1/T, где Т - период перемещения изображения фона в плоскости частотного растра. Период Т связан с параметрами частотного растра и скоростью vиз перемещения изображения фона в плоскости частотного растра
T=  где l - длина пути изображения в пределах ширины прозрачной полосы или ФЧП 1.
где l - длина пути изображения в пределах ширины прозрачной полосы или ФЧП 1.
Если угол наклона прозрачных полос к оси Х симметрии ϕ , то длина пути l изображения будет
l=  =
=  где h - ширина прозрачной полосы, тогда
где h - ширина прозрачной полосы, тогда
f0=  sinϕ Если продольная ось Х КА, с которой совмещена ось Х симметрии частотного растра, отклонится от вектора скорости
sinϕ Если продольная ось Х КА, с которой совмещена ось Х симметрии частотного растра, отклонится от вектора скорости  (
( на угол ±Δϕ , то вследствие изменения длины пути l частоты в левом и правом каналах будут отклоняться от f0:
на угол ±Δϕ , то вследствие изменения длины пути l частоты в левом и правом каналах будут отклоняться от f0: 
 и
и
f2=  sin(ϕ-Δϕ) Разностная частота
sin(ϕ-Δϕ) Разностная частота
± Δf= f1-f2=  [sin(ϕ+Δϕ)-sin(ϕ-Δϕ)] При малых значениях углов sinΔϕ≈Δϕ , тогда
[sin(ϕ+Δϕ)-sin(ϕ-Δϕ)] При малых значениях углов sinΔϕ≈Δϕ , тогда
± Δf=  2cosϕ·Δϕ
2cosϕ·Δϕ
± Δf=  cosϕ·Δϕ (1)
cosϕ·Δϕ (1)
Следовательно, разность частот сигналов с двух каналов ФП пропорциональна углу Δϕ отклонения оси Х симметрии частотного растра (продольной оси КА) от вектора относительной скорости полета КА.
Знак ± разности частот правого f1 и левого f2 каналов определяет знак угла Δϕ отклонения оси Х симметрии частотного растра от направления скорости изображения vиз в плоскости частотного растра, а следовательно, отклонения продольной оси Х КА от вектора относительной скорости полета  .
.
Так, если f1 > f2, отклонение Δϕ- против часовой стрелки. Если f1 < f2, отклонение Δϕ - по часовой стрелке.
Примеры использования.
1. Наибольший интерес представляет использование РМКФ по фону звездного неба для ориентации межпланетных КА, стабилизированных вращением вокруг одной из главных осей КА, а также вокруг любой другой оси, проходящей через центр масс КА. Такой вид ориентации используется как для стабилизации положения плоскости вращения вокруг оси, ориентированной в любом заданном направлении в межпланетном пространстве компланарно-перпендикулярной оси симметрии РМКФ, так и для обзорных поисковых научных исследований космического пространства научными приборами, оптические оси визирования которых расположены в плоскости вращения в режиме инерциальной ориентации.
Для такой ориентации КА с вращением величина vиз в формуле (2)
vиз= ωka˙F
и Δϕ=  (2) где ωка - угловая скорость вращения КА вокруг собственного центра масс;
(2) где ωка - угловая скорость вращения КА вокруг собственного центра масс;
F - фокусное расстояние объектива.
Угловые скорости ωка вращения КА могут задаваться, а также возникать незапланированно при смещении центра массы (ц. м. ) КА или при воздействии внешних возмущений (давление солнечного света, ветра или при отделении КА от ракетоносителя).
Наименьшие значения ωка, практически возникающие от непредсказуемых воздействий порядка 0,1-1о/с. Стабилизирующие значения ωкастаб. могут иметь значения от 0,5о/с и выше до десятка градусов в сек. В специальных случаях это могут быть десятки градусов в секунду.
Кроме обеспечения высокой точности ориентации, использование РМКФ позволяет контролировать, а следовательно, управлять положением плоскости вращения и скоростью вращения КА.
2. Важное значение имеет контроль за скоростью вращения КА и особенно при малых значениях ω = (0,1-1)о/c во время проведения исследований.
Определение среднего значения угловой скорости вращения КА по фону звездного неба производится по формуле
f=  sinϕ (3) или ωка=
sinϕ (3) или ωка=  f
f
Зависимости точности курсовой ориентации Δϕ или положения плоскости (оси) вращения, а также угловой скорости вращения по фону звездного неба от величина h при прочих параметрах, принятых в упомянутой ссылке (1), представлены в табл. 1 и 2.
Как следует из (2), точность Δϕ определения курсовой ориентации или точности положения плоскости и оси вращения КА (если система фиксирует разность частот Δ f = 1 Гц) зависит от скорости перемещения изображения  фона неба (земной поверхности) в фокальной плоскости объектива, в которой располагается фоточувствительная поверхность РМКФ, и от ширины ФЧП h.
фона неба (земной поверхности) в фокальной плоскости объектива, в которой располагается фоточувствительная поверхность РМКФ, и от ширины ФЧП h.
Для табличных параметров h, ω (табл. 1, 2) удобно и наглядно определить значение Δϕ методом сравнения различных значений скорости vиз перемещения изображения при h = 0,01 при прочих равных параметрах, приведенных в материале ссылки (1), тогда Δϕ= 
Определим vиз на растре для трех случаев:
1. Для фона освещенной поверхности Земли (см. (1)):
Vиз= V где Rз - радиус Земли;
где Rз - радиус Земли;
F - фокус объектива;
Н - высота полета.
2. Для фона звездного неба при орбитальном КА:
Vиз= ωорб.каF=  F где ωорб.КА - орбитальная угловая скорость КА.
F где ωорб.КА - орбитальная угловая скорость КА.
3. Для фона звездного неба при собственном вращении КА вокруг оси, проходящей через центр масс КА:
Vиз= ωка·F=  ·ωка где ωка - угловая скорость вращения КА, о/с. Так, сравнивая случаи 1 и 2, получим: Δϕ1/Δϕ2= h1/h2 H/R3= (0.25/h2)·300/6000= 0.0125/h2
·ωка где ωка - угловая скорость вращения КА, о/с. Так, сравнивая случаи 1 и 2, получим: Δϕ1/Δϕ2= h1/h2 H/R3= (0.25/h2)·300/6000= 0.0125/h2
Из сравнения случаев 1 и 2 можно сделать следующий вывод.
Курсовая ориентация КА на половине орбиты над освещенной земной поверхностью при ширине ФЧП h1 = 0,25 мм осуществляется с точностью Δϕ1= ±30 . Такую же точность Δϕ2= Δϕ1 можно обеспечить по фону звездного неба на всей орбите, уменьшив ширину ФЧП до h2 = 0,0125 мм. При этом на половине орбиты над освещенной земной поверхностью точность возрастает в 20 раз, т. е. составит Δϕ2= ±6I.
Третий случай по своей информативности не может сравниваться с первыми двумя.
Величины Δϕ3 для третьего случая определяются по формуле
Δϕ3=  = K
= K Δϕ3=
Δϕ3= 
 = 0.287
= 0.287 При h = 0,01 мм и ωка = 0,1о/с Δϕ3≈ 0,03о = 1,8I .
При h = 0,01 мм и ωка = 0,1о/с Δϕ3≈ 0,03о = 1,8I .
Величина Δϕ3 для других значений h и ωка получаются умножением или делением величины Δϕ3 = 0,03о на 2, 3, 5 и 10 (см. табл. 1).
Для осуществления стабильных контроля или ориентации по фону звездного неба необходимо непрерывное формирование частот f1 и f2 в обоих каналах РМКФ при визировании любого участка небесной сферы 4 πcp ( ≈42 тыс. кв. град. ).
Пропадание одной из частот f1, f2 кратковременное, а тем более длительное, из-за отсутствия изображения звезды определенной величины m в одном из каналов нарушает (искажает) информацию Δ f и ухудшает точность ориентации (контроль ориентации).
Чем больше световой энергии достигает поверхности РМКФ от звезды, тем меньше ее численная звездная величина m и тем реже на небесной сфере можно обнаружить такую звезду. Чем меньше световой энергии достигает поверхности РМКФ от звезды, тем больше ее звездная величина и тем чаще на небесной сфере можно обнаружить такую звезду.
Иными словами, чем "слабее" звезда, тем большее количество таких звезд приходится на 1 квадратный градус небесной сферы.
Для стабильной работы РМКФ необходимо выбрать такую звездную величину m, при которой в каждый канал РМКФ (через объектив) попадает достоверно одна звезда.
Так, звезд величиной m = 6 на небесной сфере порядка ≈ 6 тысяч или в среднем ≈0,14 звезды на 1 квадратный градус небесной сферы.
Таким образом, объектив с полем зрения 10о х 10о = 100 кв. град. обеспечит на поверхности РМКФ ориентировочно ≈ 14 звезд. При этом порог чувствительности РМКФ должен быть предельно низким, чтобы фиксировать звезды с m ≅6 при соответствующей электронике.
Технико-экономическое обоснование
1. РМКФ с h < 0,25 мм функционально заменяет стеклянные растровые системы, обеспечивая при этом:
- большую точность ориентации и стабилизации управления КА и самолетов;
- упрощение (уменьшение веса) конструктивных приборных решений благодаря уменьшению количества главных элементов конструкций;
- снижение стоимости.
2. РМКФ функционально заменяет гироскопические элементы аналогичных приборных решений, обеспечивая при этом:
- большой ресурс функционирования благодаря отсутствию механических вращающихся элементов-роторов гироскопов;
- меньшую потребную мощность.
3. РМКФ открывает принципиально новые возможности использования его в наземной промышленной аппаратуре строительной, заводской, лабораторной для регистрации перемещений, вращений, колебаний (качений) зданий, элементов конструкций, динамики физических процессов и явлений.
Уменьшение величины h с 0,25 до 0,01 мм и менее позволяет использовать РМКФ в системах обеспечения ориентации плоскости вращения вокруг оси КА, ориентированной в любом заданном направлении пространства компланарно-перпендикулярной оси симметрии многоэлементного фотоприемника с точностью Δϕ < 3о до  = 25 раз и более. (56) 1. Изнар А. Н. и др. Оптикоэлектронные приборы космических аппаратов. М. : Машиностроение, 1972, с. 196-200.
= 25 раз и более. (56) 1. Изнар А. Н. и др. Оптикоэлектронные приборы космических аппаратов. М. : Машиностроение, 1972, с. 196-200.
2. Патент США N 4627724, кл. 356-141, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2023 |
|
RU2799623C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2020 |
|
RU2749580C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| Способ определения координат звезд звездным датчиком, установленным на космическом аппарате, при каталогизации звездного неба | 1988 |
|
SU1656323A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2638077C1 |
| ШИРОКОУГОЛЬНЫЙ СПЕКТРОРАДИОМЕТР | 1997 |
|
RU2125250C1 |
| Космическая система обзора небесной сферы для обнаружения небесных тел | 2015 |
|
RU2621464C1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1989 |
|
SU1795708A1 |
| Прибор для фотоэлектрической регистрации прохождения звезд | 1971 |
|
SU409071A1 |
Использование: изобретение относится к полупроводниковым приборам и представляет собой растровый многоэлементный кремниевый фотоприемник (РМКФ), выполненный из светочувствительных полосок на кремниевой подложке, размещаемой в фокальной плоскости объективов. РМКФ работает как пространственно-частотный фильтр. Преимущественная область использования - в навигационных приборах повышенной точности, курсовой и орбитальной ориентации космических аппаратов (КА) и самолетов по освещенному фону планет или фону звездного неба и стабилизации КА в пространстве путем закрутки вокруг осей, проходящих через центр массы КА, а также в наземной аппаратуре для анализа динамики колебаний, перемещений элементов конструкций, протекания физических явлений. Конструкция РМКФ образована кремниевой подложкой, на которой с каждой стороны от оси симметрии под углом 35 - 50к этой оси нанесены автономные фоточувствительные полоски шириной порядка 0,01 мм с промежутками, равными ширине фоточувствительных полосок, при этом последние электрически объединены с правой и левой сторон от оси симметрии проводящими шинами в независимые группы, образуя два независимых растровых фотоприемных канала с общим базовым выводом от кремниевой подложки. Фоточувствительные полосы могут быть соединены с проводящими шинами через разделительные диоды. 3 ил. , 2 табл.
