Изобретение относится к космической технике и может быть использовано при составлении звездных каталогов с помощью измерительных средств, установленных на космических аппаратах (КА).
Цель изобретения - повышение точности измерения и сокращение энергозатрат.
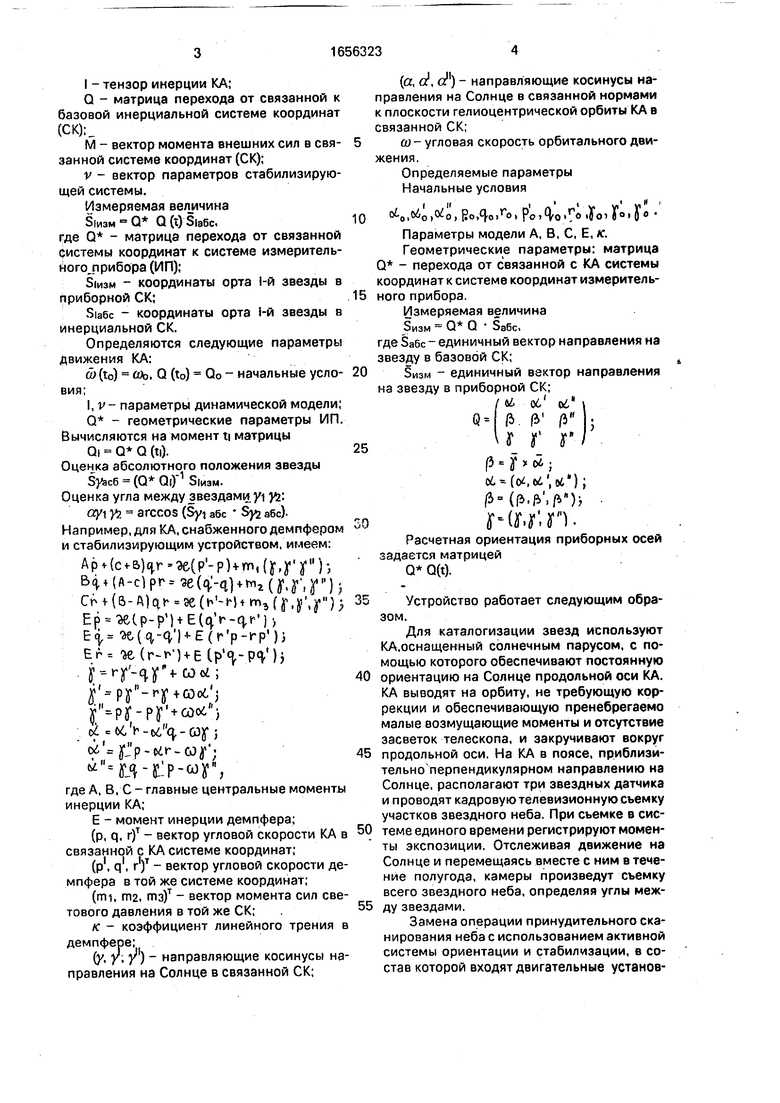
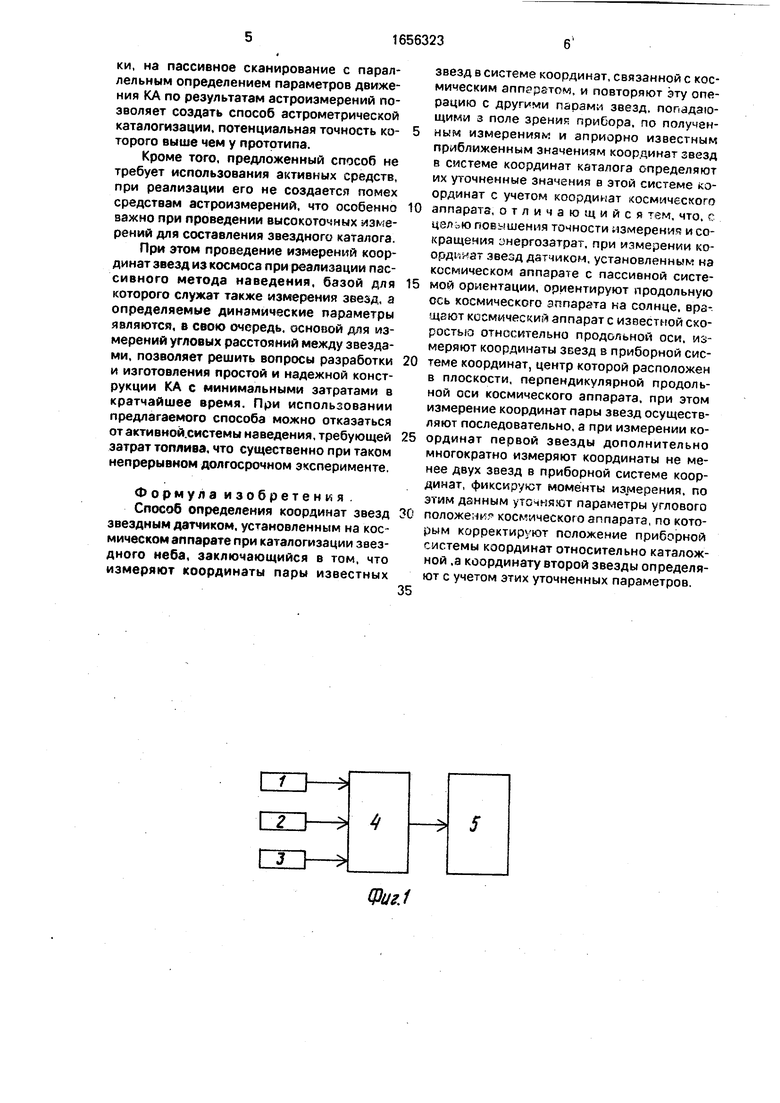
На фиг.1 приведен пример реализации предложенного способа; на фиг.2 - расположение полей зрения трех звездных датчиков.
Устройство, реализующее способ, содержит, например, три измерительных прибора - звездных датчика 1, 2 и 3. соединенных через блок 4 обработки информации с вычислительным блоком 5. Поля зрения звездных датчиков пространственно
разнесены и расположены так, что при сканировании в пространстве за счет вращения носителя КА просматривают пояс, ширина которого равна трем диаметрам пояя зрения датчика.
Вектор угловой скорости КА определяется в соответствии с дифференциальным
уравнением . . , ,--«; 7КQ-Q+Jw MfiJ.co.v),
Q-QC,
О -С0г (J4.
0t 0 -63, СО,
- знак дифференцирования во времени;
где (У- вектор угловой скорости КА отнесенный к связанным с ним осям;
о
СП
о
ы го со
I - тензор инерции КА; Q - матрица перехода от связанной к базовой инерциальной системе координат
(СК):
М - вектор момента внешних сил в связанной системе координат (СК);
V - вектор параметров стабилизирующей системы.
Измеряемая величина
5|изм 0. Q(t)Sla6c,
где Q - матрица перехода от связанной Системы координат к системе измеритель- нопмфибора (ИП);
3|изм - координаты орта 1-й звезды в приборной СК;
Sia6c - координаты орта i-й звезды в инерциальной СК.
Определяются следующие параметры Движения КА:
ft(t0) о. Q (to) Qo - начальные условия;
I, v- параметры динамической модели;
Q - геометрические параметры ИП. Вычисляются на момент ti матрицы
QI - Q Q (ti). Оценка абсолютного положения звезды
jtyace (Q Qi) 1 SluaM.
Оценка угла между звездами yi yi ау уг arccos (Syt абс % Збс). Например, для КА, снабженного демпфером и стабилизирующим устройством, имеем:
Ap + fc + Btyr-aeCp -pHmJjf.y jf h BiMA-clpr-ge - + .y.j).
OMe-Ateir-ee -Htm ff .jf .y)}
Её-Жр-рЧ + ЕЦ г-цГЬ (г р-гр Ь
Ег -ге () + Е Ip VPVb j|
X -PI -Ч «
Я -РУ-РГ + Ю i cjt «ccV-ei ty-ajf}
y -tir-COf;
вМ-Јр-ыу,
где А, В, С - главные центральные моменты инерции КА;
Е - момент инерции демпфера;
(р, q, r)T - вектор угловой скорости КА в связанной с КА системе координат;
(р1, q1, r )T - вектор угловой скорости демпфера в той же системе координат;
(mi, гп2, тз)т - вектор момента сил светового давления в той же СК;
к - коэффициент линейного трения в демпфере;
(Х- У г ) направляющие косинусы направления на Солнце в связанной СК;
(a, d, о) - направляющие косинусы направления на Солнце в связанной нормами к плоскости гелиоцентрической орбиты КА в связанной СК;
ш - угловая скорость орбитального движения.
Определяемые параметры
Начальные условия
, Ро/Ь.Го.р оЛо о.Уо. Ј° Параметры модели А, В, С, Е, к. Геометрические параметры: матрица Q - перехода от связанной с КА системы координат к системе координат измеритель- ного прибора.
Измеряемая величина
Зизм Q Q Забс,
где Забс - единичный вектор направления на звезду в базовой СК;
Зизм - единичный вектор направления на звезду в приборной СК;
/ tL Об &/, i
Q- И U1 /5
I X1 У SC Г °
o6-(o,od ,96); /J-(Ј,)
f-(IT.jf ,n.
Расчетная ориентация приборных осей задается матрицей Q Q(t).
Устройство работает следующим образом.
Для каталогизации звезд используют КА.оснащенный солнечным парусом, с помощью которого обеспечивают постоянную
ориентацию на Солнце продольной оси КА. КА выводят на орбиту, не требующую коррекции и обеспечивающую пренебрегаемо малые возмущающие моменты и отсутствие засветок телескопа, и закручивают вокруг
продольной оси. На КА в поясе, приблизительно перпендикулярном направлению на Солнце, располагают три звездных датчика и проводят кадровую телевизионную съемку участков звездного неба. При съемке в системе единого времени регистрируют моменты экспозиции. Отслеживая движение на Солнце и перемещаясь вместе с ним в течение полугода, камеры произведут съемку всего звездного неба, определяя углы между звездами.
Замена операции принудительного сканирования неба с использованием активной системы ориентации и стабилизации, в состав которой входят двигательные установ«и, на пассивное сканирование с параллельным определением параметров движения КА по результатам астроизмерений позволяет создать способ астрометрической каталогизации, потенциальная точность ко- торого выше чем у прототипа.
Кроме того, предложенный способ не требует использования активных средств, при реализации его не создается помех средствам астроизмерений, что особенно важно при проведении высокоточных измерений для составления звездного каталога.
При этом проведение измерений координат звезд из космоса при реализации пассивного метода наведения, базой для которого служат также измерения звезд, а определяемые динамические параметры являются, в свою очередь, основой для измерений угловых расстояний между звездами, позволяет решить вопросы разработки и изготовления простой и надежной конструкции КА с минимальными затратами в кратчайшее время. При использовании предлагаемого способа можно отказаться отактивной.системы наведения, требующей затрат топлива, что существенно при таком непрерывном долгосрочном эксперименте.
Формула изобретения.
Способ определения координат звезд звездным датчиком, установленным на космическом аппарате при каталогизации звездного неба, заключающийся в том, что измеряют координаты пары известных
5
0
5 0 5
0
5
звезд в системе координат, связанной с космическим аппаратом, и повторяют эту операцию с другими парами звезд, попадающими з поле зрения прибора, по полученным измерениям и априорно известным приближенным значениям координат звезд в системе координат каталога определяют их уточненные значения в этой системе координат с учетом координат космического аппарата, отличающийся тем, что. с целью повышения точности измерение и сокращения энергозатрат, при измерении координат звезд датчиком, установленным на космическом аппарате с пассивной системой ориентации, ориентируют продольную ось космического аппарата на солнце, вращают космический аппарат с известной скоростью относительно продольной оси, измеряют координаты звезд в приборной системе координат, центр которой расположен в плоскости, перпендикулярной продольной оси космического аппарата, при этом измерение координат пары звезд осуществляют последовательно, а при измерении координат первой звезды дополнительно многократно измеряют координаты не менее двух заезд в приборной системе координат, фиксируют моменты измерения, по этим данным уточняют параметры углового положена, космического аппарата, по которым корректируют положение приборной системы координат относительно каталожной .а координату второй звезды определяют с учетом этих уточненных параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2023 |
|
RU2799623C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2638077C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624408C2 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ КОСМИЧЕСКОГО СКАНЕРНОГО СНИМКА | 2015 |
|
RU2597024C1 |
Изобретение может быть использовано при составлении звездных каталогов. Цель изобретения - повышение точности измерения и сокращение энергозатрат. Это достигается путем измерения координат звезд с космического аппарата с пассивной системой ориентации, для чего ориентируют его продольную ось на солнце, вращая космический аппарат с известной скоростью относительно продольной оси. Координаты звезд измеряют в приборной системе координат, с помощью, например, звездных датчиков, причем измерение координат пары звезд производят последовательно, а при измерении координат первой звезды дополнительно и многократно измеряют координаты не менее двух звезд с фиксацией моментов измерения. Уточнив параметры углового положения космического аппарата, корректируют положение приборной системы координат относительно каталожной. 2 ил, (Л С
ш-
тц-
Фии1
/Хх
т
(Pi/г. 2
III / / /
| Подобед В.В. | |||
| Нестеров В.В | |||
| Общая астрономии, М.: Наука | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Итоги науки и техники | |||
| ИСЗ Гипларх | |||
| М.: Наука | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
