Изобретение относится к способам определения ориентации по координатам наблюдаемых звезд, преимущественно для навигационных целей. В частности, для космической навигации путем определения положения космического аппарата относительно изображений звезд, наблюдаемых на небесной сфере в поле зрения звездного датчика.
С появлением космических аппаратов активно разрабатываются и совершенствуются средства и методы навигации по наблюдениям звезд. Высокие скорости перемещения космических аппаратов диктуют высокие требования к оперативности таких определений, особенно на начальном участке после выведения на орбиту, когда положение аппарата неизвестно.
В настоящее время приборы звездной ориентации становятся основным средством космической навигации. Конструкция типичного звездного датчика ориентации содержит входную оптику, которая ограничивает поле зрения прибора, матричного фотоприемника и электронного блока определения ориентации с каталогом звезд (В.И. Федосеев, М.П. Колосов Оптико-электронные приборы ориентации и навигации космических аппаратов М.: Логос, 2007 г.).
Методы обеспечения ориентации космических аппаратов, принципы построения астроизмерительных систем, обзор их основных производителей и технических характеристик этих приборов, а также функциональная структура блоков звездного датчика описаны в статье (О.Н. Замирец, Я.О. Замирец Методы и компоненты построения астроизмерительных систем для космических аппаратов. Системи обробки  випуск 5, 2016 г.).
випуск 5, 2016 г.).
Требования к этим приборам и обзор наиболее применяемых звездных датчиков дан также в (А.И. Захаров, М.Е. Прохоров, М.С. Тучин, А.О. Жуков Минимальные технические характеристики звездного датчика ориентации, необходимые для достижения заданной погрешности. Астрофизический бюллетень, 2013, том 68, №4).
Сложность определения ориентации заключается в том, что в поле зрения прибора звездной ориентации попадают только несколько звезд, а их привязка к координатной системе и положение космического аппарата в момент наблюдения неизвестна. Поэтому, главным локальным признаком для определения звезд всегда было опознавание известных созвездий по их форме и нахождение звезды по месту в нем. Традиционно для этого использовались известные навигационные созвездия (Л.М. Воробьев Астрономическая навигация летательных аппаратов. Изд. Машиностроение, 1968 г.).
Известны способы определения ориентации по наблюдениям звезд, реализуемые в навигационных приборах. Сущность этих методов заключается в том, что наблюдают группу звезд в поле зрения прибора звездной ориентации, образующих треугольник, измеряют расстояния между звездами и по величине этих расстояний находят в бортовом каталоге соответствующую группу звезд и их координаты, а относительно них определяют положение оптической оси прибора звездной ориентации. Сложность заключается в том, как найти этот треугольник среди множества других на звездном небе.
Известен способ идентификации звезд для космической навигации, наблюдаемых в поле зрения системы астроориентации с помощью вычислительных машин, в память которых записаны координаты звезд каталога. Он заключается в том, что сначала идентифицируют звезды на большем участке, а потом на меньшем участке небесной сферы для сокращения числа требуемых действий (Патент РФ 392335 Способ идентификации звезд. МКИ G01C 21/02 от 1973 г.).
Принцип выбора операций для распознавания групп звезд основывается на вычислении угловых расстояний между звездами в наблюдаемой группе и сравнении этих расстояний с таковыми же, но вычисленными для звезд из каталога. При этом реализуют процесс перебора и сравнения для каждой пары наблюдаемых звезд и соответствующего им углового расстояния с расстояниями между звездами из каталога (А.В. Иванов, Д.Ю. Пашенцев, Р.В. Тишкин, Алгоритмы идентификации звездных узоров в задаче уточнения элементов внутреннего ориентирования. Вестник Самарского государственного аэрокосмического университета №4, 2012 г.).
Известно решение задачи селекции звезд для решения проблемы ориентации космических аппаратов по звездам, а также обобщенное описание метода отбора звезд, основанного на критерии постоянства взаимных угловых расстояний. Отбор звезд для распознавания осуществляется на основании критерия максимального правдоподобия путем перебора всех возможных сочетаний. Авторы сами подчеркивают трудоемкость выполнения и сложность его реализации (И.С. Кружилов, О.Ю. Шамаев, Алгоритм селекции звезд по постоянству угловых расстояний. Программные продукты и системы №3, 2009 г.).
Технология распознавания звезд на основе перебора звездных тругольников подробно описана также в (И.В. Соловьев Алгоритмы оценки ориентации и угловой скорости космического аппарата с помощью звездного датчика. Авиакосмическое приборостроение №7, 2013 г.).
Из всего многообразия алгоритмов идентификации как наиболее быстродействующие используют геометрические. Идея геометрических алгоритмов заключается в составлении из звезд, попавших в поле зрения объектива, различных геометрических фигур, в которых в качестве базовых характеристик для распознавания используются межзвездные угловые расстояния, сферические углы, образуемые звездами на небесной сфере, отношения сторон, периметры, площади и прочие характеристики, с последующим сравнением их с таковыми же, но полученными для звезд из каталога, заранее записанными в память компьютера (С.В. Гайворонский, Е.В. Русина, В.В. Цодокова Идентификация звезд при определении астрономических координат автоматизированным зенитным телескопом. Научно-технический вестник информационных технологий, механики и оптики. Том 15, №1, 2015 г.).
Основным недостатком всех этих способов является именно необходимость перебора большого числа параметров в бортовом каталоге для нахождения требуемой конфигурации звезд. При большом числе звезд в бортовом каталоге, даже при большой скорости процессора этот перебор занимает некоторое время, что может быть и критично для космического аппарата.
Известны также различные способы, позволяющие повысить эффективность определения ориентации по звездам.
Известен способ повышения вероятности распознавания звезд с помощью дополнительной информации об угловой скорости космического аппарата за счет комплексирования звездного датчика и гироскопа (В.О. Князев, А.А. Поздняков, Повышение вероятности распознавания звезд путем комплексирования звездного датчика и МЭМС-гироскопа. Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2014. №1).
Известен способ, при котором используется дополнительная информация о направлении на Солнце, например, в (Патент РФ 1656323 Способ определения координат звезд звездным датчиком, установленным на космическом аппарате, при каталогизации звездного неба. МКИ G01C 21/24).
Известен способ, при котором на околопланетных орбитах для тех же целей используют дополнительную информацию о местной вертикали, например, (Патент РФ 2376213 Способ ориентации и автономной навигации космического аппарата системы мониторинга Земли и околоземного. МКИ G01C 21/02).
Известен способ, в котором при идентификации наблюдаемых звезд используется дополнительная информация о спектральном составе излучения этих звезд, например, (Патент РФ 2052188 Способ идентификации точечных объектов. МКИ G01N 21/25).
Однако эти способы не решают проблем необходимости перебора вариантов и ориентации на начальном этапе выведения, а также дополнительно увеличивают объем требуемых определений.
При рассмотрении перспектив развития приборов звездной ориентации отмечается, что подход к выбору оптики звездных приборов пока остается неизменным, полагают целесообразным включения в состав звездных приборов ориентации миниатюрных трехосных датчиков угловой скорости, а в блоках электроники использовать высокопроизводительные микропроцессоры, программируемые логические интегральные схемы (ПЛИС) со специальным математическим обеспечением. Для эффективного определения ориентации важным ставится требование многократного сокращения объема обрабатываемой информации. Прибор должен представлять собой функционально законченное устройство и иметь при этом весьма малые габариты и низкое энергопотребление. Их дальнейшее развитие по пути улучшения эксплуатационных характеристик возможно путем совершенствования схемных решений и программно-математического обеспечения (Г.А. Аванесов, Р.В. Бессонов, А.А. Форш, М.И. Куделин Анализ современного состояния и перспектив развития приборов звездной ориентации семейства БОКЗ, Известия вузов. Приборостроение. 2015 г., Т. 58, №1).
Наиболее близким прототипом выбрана технология распознавания звезд для определения ориентации, описанная в публикации (С.Н. Воробьев и И.В. Лазарев Алгоритм распознавания конфигураций звезд, Информационные управляющие системы, №2, 2008 г.), так как в ней, так же как в предлагаемом здесь способе, используют измерения расстояний между звездами и подробно описан сам процесс определения ориентации. Так же как многие другие известные нам способы, которые основываются на тех же операциях измерения расстояний между звездами, он приводит к перебору информации бортового каталога.
Способ прототипа заключается в том, что предварительно составляют и запоминают бортовой каталог координат звезд, ограничивая выбор звезд звездной величиной, отображаемой используемой системой наблюдения, затем в процессе определения ориентации формируют изображение участка звездного неба на фотоприемнике и выбирают наиболее яркую звезду в центральной части поля зрения, затем определяют ее координаты в координатной системе прибора, выбирают соседние с ней звезды (в порядке убывания блеска или расстояния), определяют попарные расстояния на изображении от выбранной центральной звезды до выбранных соседних звезд, а также определяют попарные расстояния между самими соседними с ней звездами, образующими треугольник с первой выбранной звездой, затем последовательно сравнивают набор измеренных расстояний, полученных для наблюдаемой группы звезд с расстояниями, полученными из бортового каталога, а при совпадении всех этих расстояний отождествляют первую звезду в центре изображения с ее координатами, которые выбирают из бортового каталога, а по ее положению относительно координатной системы прибора определяют положение аппарата.
Распознавание выбранного множества звезд реализуется на базе, инвариантной к ориентации космического аппарата конфигурации звезд с набором взаимных угловых расстояний между ними. Нормализация исходной конфигурации - необходимые поворот и сдвиг изображения к стандартной форме, соответствующей данным звездного каталога, позволяет рассчитать ориентацию (углы рыскания, тангажа и крена). Авторы полагают, что описанная процедура распознавания конфигурации достаточно надежна для группы из четырех звезд и реализуема в современных бортовых вычислительных средствах в режиме реального времени. При этом надежно распознаются любые выбранные четыре звезды с достаточной яркостью (блеском).
Основным недостатком рассматриваемой технологии прототипа также является необходимость использования перебора данных каталога для идентификации звезд.
Для получения более эффективного решения предлагается изменение самой логики использования признаков в поиске звезд, а соответственно, и технологии решения задачи определения звездной ориентации, которая при традиционном походе всегда приводит к необходимости перебора вариантов для сравнения.
Сущность предлагаемого технического решения заключается в том, что вместо нахождения подобия конфигураций звездных узоров осуществляется переход от реального пространства измеренных координат наблюдаемых звездных к признаковому пространству, построенному на локальных измерениях расстояний между звездами, и прямому нахождению звезд в этом пространстве с признаковыми координатами. Реальные пространственные координаты выполняют в этом пространстве роль имен этих звезд, что позволяет определять их без перебора.
Предлагаемый способ определения ориентации по изображениям участков звездного неба заключается в том, что предварительно, как и в прототипе, составляют и запоминают бортовой каталог координат звезд ограничивая выбор звезд звездной величиной, отображаемой используемой системой наблюдения. Однако в качестве рабочих координат звезд в нем используют расстояния между звездами.
Возможны варианты выбора этих расстояний в качестве координатной системы пространства признаков. Это может быть как набор расстояний до ближайших звезд, так и набор расстояний до ближайших звезд и расстояния между ними. Реальные пространственные координаты служат именами звезд в каталоге. Число используемых параметров определит и размерность рассматриваемого пространства, в котором выполняется идентификация звезды. Опыт показывает, что использование трех параметров уже дает хорошие результаты при поиске звезд в трехмерном признаковом пространстве.
Затем на этапе определения ориентации в полете получают изображения участков звездного неба, выбирают наиболее яркую звезду в центральной части поля зрения и определяют ее положение в приборной системе координат, затем выбирают соседние с ней звезды в порядке убывания расстояния или наблюдаемой яркости (блеска), определяют соответствующие попарные расстояния на изображении, а затем используя эти измеренные расстояния, как координаты признакового пространства, находят точку в этом пространстве и идентифицируют звезду с каталожными координатами, которую находят в пределах области ошибки от этой точки. Имя этой звезды в бортовом каталоге определит ее координаты в реальном пространстве. Затем определяют ориентацию по положению центральной звезды относительно приборной системы координат.
Поскольку применяемые фотоприемники имеют дискретную структуру с конечным размером элементов (пикселов), то при одинаковом масштабе оптического изображения звездного неба результат наблюдений будет зависеть от размера этого элемента. При грубом разрешении фотоприемника может наблюдаться наложение отдельных звезд в признаковом пространстве. Однако с увеличением пространственного разрешения наблюдательной системы вероятность наложения координат быстро уменьшается.
Проверка эффективности предлагаемого способа производилась для компьютерной модели звездного датчика с полем зрения 2 градуса и матричным фотоприемником с числом пикселов 1024×1024. Из каталога Tycho-2 было выбрано 251717 звезд до 10,5-й звездной величины. Сравнение координат в пространстве признаков в каталоге с координатами на изображении производится следующим образом: координаты различны, если их разность с учетом знака по модулю больше 0.4 пикселя (0,00055°). Было произведено 100000 случайных выборов разных участков звездного неба. Моделирование производилось с введением шумов изображения до трех звездообразных помех на кадр. Из всего числа кадров получено 18 не определившихся, при этом ложного распознавания не наблюдалось ни разу.
В качестве иллюстрации сущности предлагаемого технического решения на рис. 1 показано полученное распределение из 3350 звезд <=5.6 звездной величины и с координатами, определенными с точностью до 1.0 пикселя звезд из каталога Tycho-2 в признаковом пространстве, построенном на координатах межзвездных расстояний. Ортами координат в данном случае служили расстояния до ближайшей из соседних звезд для первой из них, для следующей соседней по близости для второй и между соседними для третьей орты. На этом рисунке наблюдается пространственный характер размещения звезд в признаковом пространстве.
Предлагаемый способ обеспечивает эффективное определение глобальных пространственных координат звезд с использованием бортового каталога по измерениям локальных характеристик - расстояний между соседними звездами в поле зрения звездного датчика. Выполнение операций способа позволяет непосредственно определять положение звезды в признаковом пространстве по результатам наблюдений. Для реализации способа не требуется выполнять перебора данных каталога для идентификации звезды. Описанные процедуры существенно упрощают выполнение, исключают необходимость использования циклических операций поиска и сокращают время, необходимое для определения ориентации. Все операции предложенного способа легко реализуются в структуре блоков электроники современных звездных датчиков существующими средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2020 |
|
RU2749580C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПО ИЗОБРАЖЕНИЯМ УЧАСТКОВ ЗВЕЗДНОГО НЕБА | 2023 |
|
RU2799623C1 |
| Способ межзвездной навигации космического корабля | 2018 |
|
RU2697866C1 |
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| Устройство определения ориентации объекта по звездам с расщепленным полем зрения | 2022 |
|
RU2796578C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |

Изобретение относится к способам определения ориентации по координатам наблюдаемых звезд, преимущественно для навигационных целей. В частности, для космической навигации путем определения положения космического аппарата относительно изображений звезд, наблюдаемых на небесной сфере. Способ определения ориентации по изображениям участков звездного неба заключается в том, что предварительно составляют и запоминают бортовой каталог координат звезд, ограничивая выбор звезд звездной величиной, отображаемой используемой системой наблюдения. Затем в процессе определения ориентации формируют изображение участка звездного неба, выбирают наиболее яркую звезду в центральной части поля зрения, выбирают соседние с ней звезды. Далее определяют попарные расстояния на изображении от выбранной центральной звезды до выбранных соседних звезд, а затем сравнивают измеренные на полученном изображении расстояния между звездами с расстояниями, полученными из бортового каталога. При совпадении всех этих расстояний отождествляют выбранную центральную звезду на изображении с соответствующей звездой из каталога и определяют ориентацию, учитывая положение этой звезды на изображении в приборной системе координат. При этом каждую звезду при составлении бортового каталога дополнительно характеризуют значениями расстояний до двух ближайших к ней звезд и расстоянием между самими этими звездами или до трех ближайших к ней звезд и по результатам этих определений формируют трехкоординатное признаковое пространство. В процессе определения ориентации, для выбранной на изображении звезды, по указанным измеренным расстояниям определяют положение этой звезды в признаковом пространстве, а затем по ее каталожным координатам на звездном небе определяют ее положение и находят ориентацию аппарата. Техническим результатом заявленного способа является повышение эффективности работы используемых датчиков звездной ориентации. 2 з.п. ф-лы, 1 ил.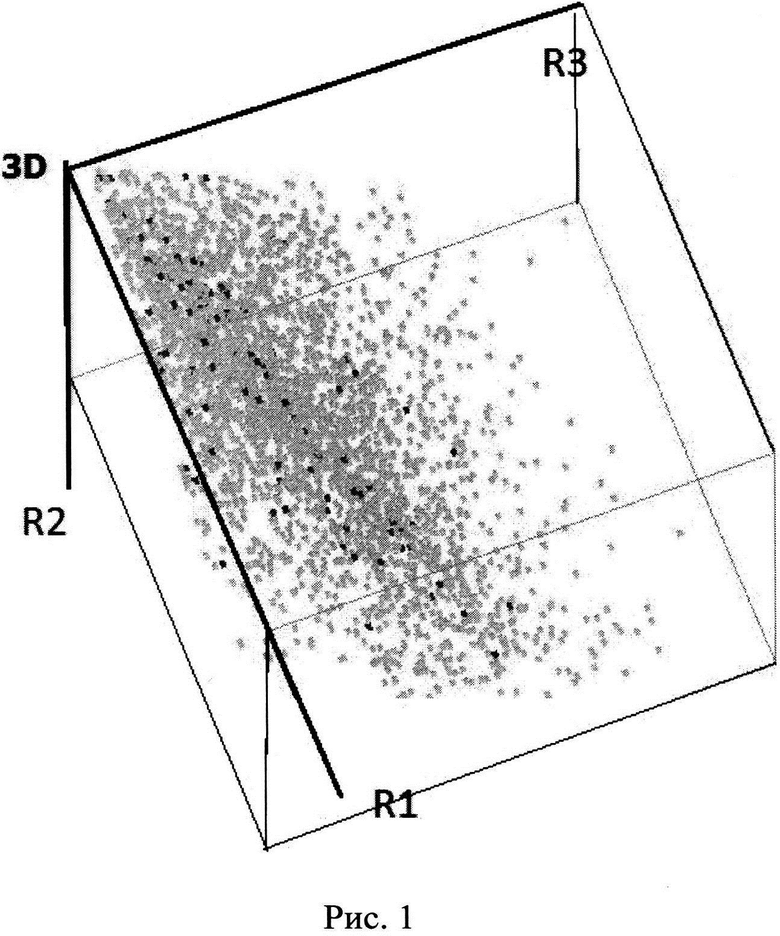
1. Способ определения ориентации по изображениям участков звездного неба, заключающийся в том, что предварительно составляют и запоминают бортовой каталог координат звезд, ограничивая выбор звезд звездной величиной, отображаемой используемой системой наблюдения, затем в процессе определения ориентации формируют изображение участка звездного неба, выбирают наиболее яркую звезду в центральной части поля зрения, выбирают соседние с ней звезды, затем определяют попарные расстояния на изображении от выбранной центральной звезды до выбранных соседних звезд, а затем сравнивают измеренные на полученном изображении расстояния между звездами с расстояниями, полученными из бортового каталога, а при совпадении всех этих расстояний отождествляют выбранную центральную звезду на изображении с соответствующей звездой из каталога и определяют ориентацию, учитывая положение этой звезды на изображении в приборной системе координат,
отличающийся тем, что при составлении бортового каталога каждую звезду дополнительно характеризуют значениями расстояний до двух ближайших к ней звезд и расстоянием между самими этими звездами или до трех ближайших к ней звезд и по результатам этих определений формируют трехкоординатное признаковое пространство, а затем в процессе определения ориентации, для выбранной на изображении звезды, по указанным измеренным расстояниям определяют положение этой звезды в признаковом пространстве, а затем по ее каталожным координатам на звездном небе определяют ее положение и находят ориентацию.
2. Способ определения ориентации по изображениям участков звездного неба п. 1,
отличающийся тем, что при отсутствии прямого совпадения измеренных расстояний с положением звезды в признаковом пространстве выбирают ближайшую к этой точке звезду в пределах области допустимой ошибки измерений.
3. Способ определения ориентации по изображениям участков звездного неба п. 1,
отличающийся тем, что при составлении бортового каталога характеризуют каждую звезду значениями расстояний до большего числа ближайших к ней звезд и формируют признаковое пространство большей размерности, а в процессе определения ориентации выполняют соответствующие измерения межзвездных расстояний по изображению и определения.
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
| Способ определения координат звезд звездным датчиком, установленным на космическом аппарате, при каталогизации звездного неба | 1988 |
|
SU1656323A1 |
| US 20150369607 A1, 24.12.2015. | |||

