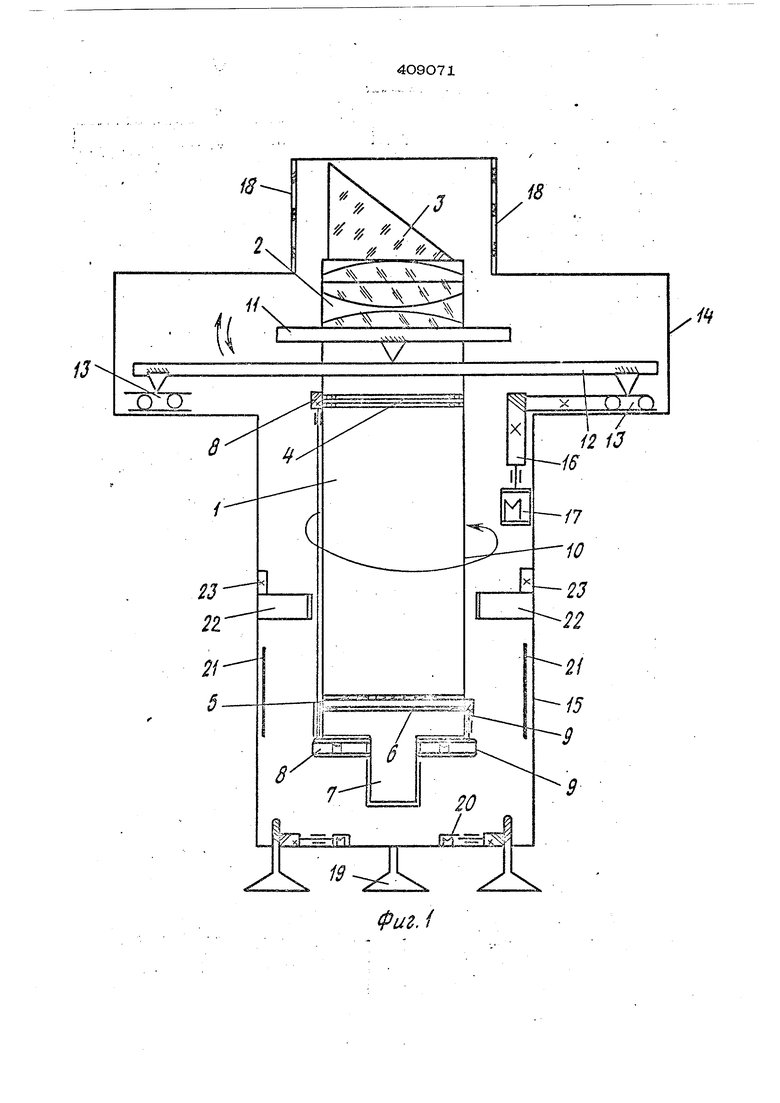
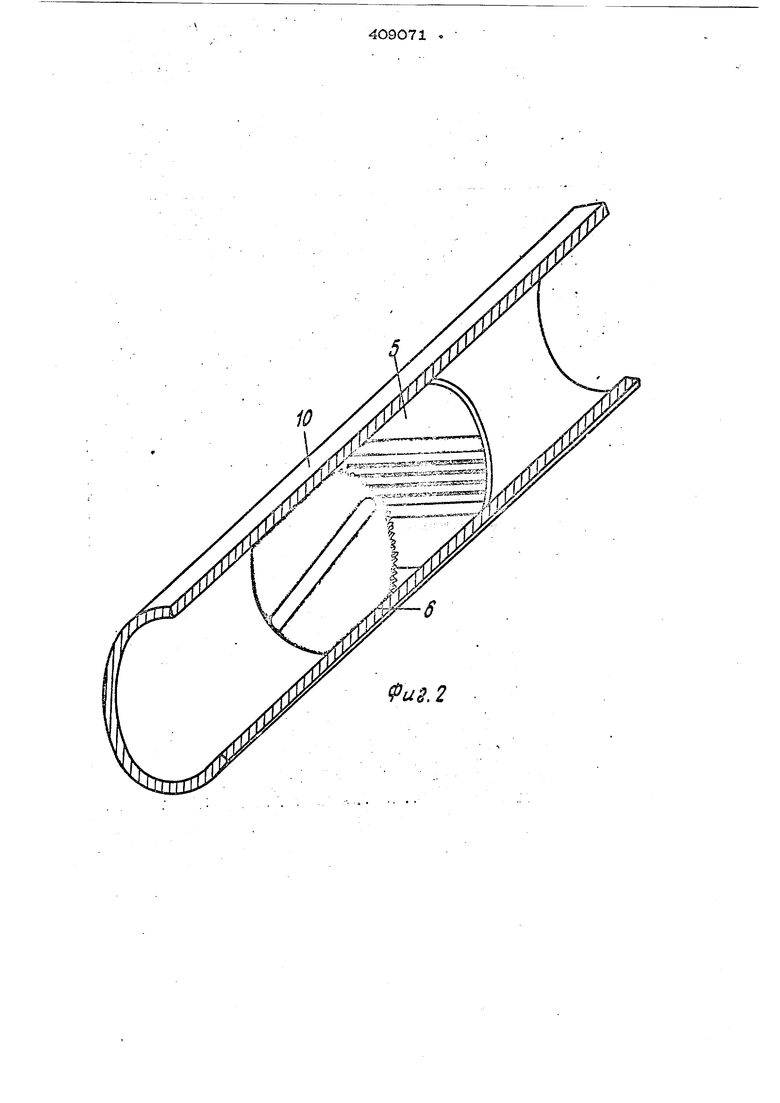
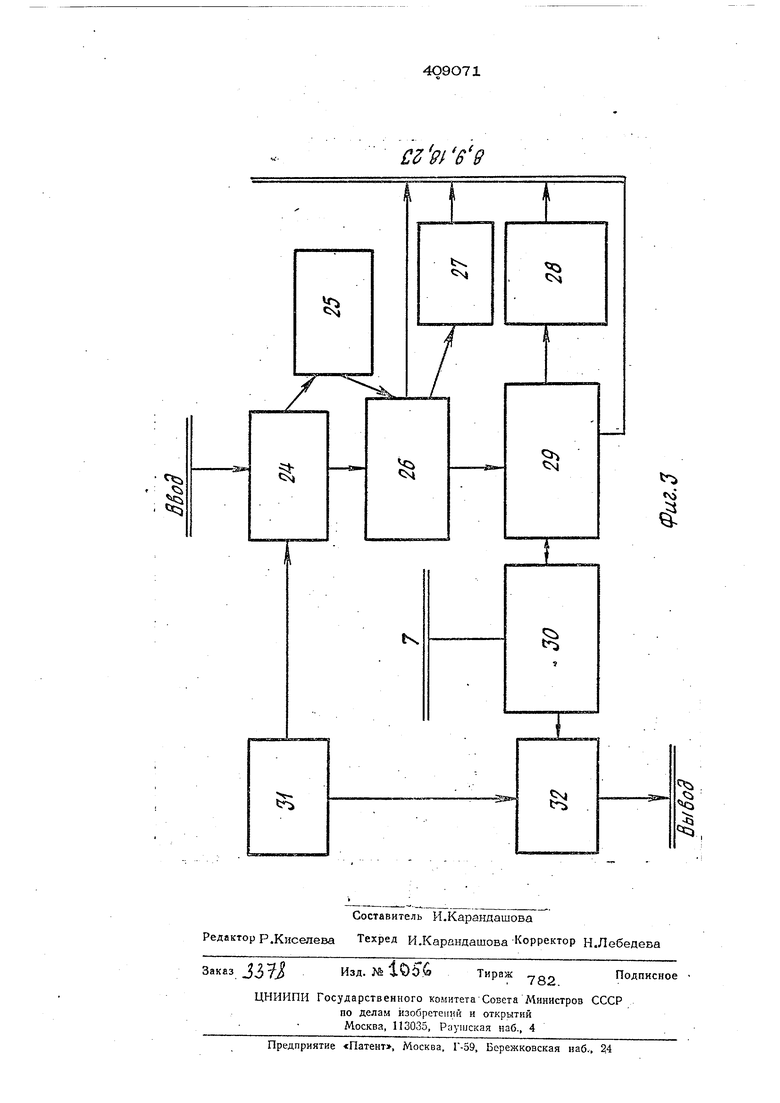
(54) ПРИБОР ДЛЯ ФОТОЭЛЕКТРИЧЕСКОЙ РЕГИСТРАЦИИ ПРОХОЖДЕНИЙ ЗВЕЗД Данное изобретение относится к обла- сти астрономических оптико-механических приборов, предназначенных для наблюдений звезд с целью .определения координат ме- стонахойодения прибора с поверхности тел СолнечгЮй системы, в частности с поверхности Луны. Астрономические приборы, используегг .мые для решения подобных задач на Земле и измеряющие зенитные расстояния, азимуты, их разности либо моменты прохождения светил, как правило, дают возможность в результате обработки проведен ных измерении получить лишь одтгу из двух планетографических координат. Отдел ные астрономические приборы, предназначе ные для совместного определения широты и долготы на Земле .универсальный инструмент, астролябия Дан}кона, циркум-зениталь и другие), не подаются полной ав: томатизации и не могут, следовательно, ;автоматически высокоточно определять ; планетографические координаты на Луне и других планетах. Известный автоматический прибор Кэрролла, состоящий из оптической части с широкоугольным объективом, электронного уровня, совмещающего оптическую ось с местной вертикалью (после предварительного нивелирования с точностью 10-30), неподвижной непрозрачной маски с радиаль-; ными щелями, расположенной в фокальной плоскости, фотоэлектрического приемника, поворотного механизма с приводом для разворота прибора вокруг вертикальной оси, портатт1вного вычислительного устройства и пульта управления, хотя имеет ряд достоинств, пригоден, однако, для наблюдения звезд лишь в узкой зенитной зоне, равной полю зрения трубы, что не позволяет в достаточной степени исключить исходные ошибки координат -звезд. (Число ; достаточно ярких звезд в этой зоне всег- да невелико). Невозможно также автома- тическое выполнение весьма сложной юстировки прибора (прохождение оптической оси через центр радтшльных нитей, выставка по азимуту, предварительное йивелирование и др.) перед сеансом наблюдений. Целью изобретения является разработ- 4 ка конструкции прибора, который после установки на поверхности небесного тела, в частности на поверхности луны, полно- стью автоматически по командам с Земли мог бы выполнить такие наблюдения звезд о которых после обработки позволя ли бы получить мгновенные планетографические координаты точки установки прибоУказанная задача решена следующим образом. Зрительная труба, включающая оптическую систему и фотопркемник, вывешена во внутренней раме карданного под: веса, что обеспечивает сохранение постоян ства угла между оптической осью и мест ной вертикалью. В фокальную плоскость введена дополнительная не прозрачная мас ка с возможностью поворота ее в плоскости установки в зависимости от азимута визирования. Это позволяет исключить зксцентричное прохождение светил. Кроме то го, установкой перед объективом призмы pacunipeHa область наблюдения, т. е. мож- О наблюдать звезды на больших зенитных расстояниях. Преимуществами указанного прибора являются:, 1.Отсутствие необходимости вынолне- ния юстировок прибора с участием человека до начала сеанса 1габлюдений, 2.Расширение оби1ей зоны обзора в процессе сеанса наблюдений, что значитель но облегчает выбор звезд, как в отношени их яркости, так и в отноилении точности знания их координат, а также позволяет сократить продолжительность каждого сеан са. 3.Возможность повышения точности наблюдений, поскольку предлагаемая конструкция прибора, предусматривающая использование для измерений метода равных вьгсот (наподобие метода, используемого при наблюдениях с астролябией Данжона), не накладывает на это принципиальных ограничений и дальнейшее повышение точности конечных результатов может достигать ся путем совершенствования технологии изготовления отдельных узлов. Применение предлагаемого прибора на Луне в различных частях ее поверхности позволит создать сеть опорных фунламвр-j тальных пунктов для уточнения исходных селенодезических дат, а также даст возможность установить аномалии суточного вращения и перемещения полюсов Луны с целью изучения ее внутреннего строения. Этот же прибор может применяться для , астроопределения на Земле и других планетах. Предлагаемый прибор схематически изображен на чертежах, где на фиг. 1 показан его общий вид; на фиг. 2 - неподвижная и под15ижная маски; на фиг. 3 - структур- i но-функциональная схема взаимосвязи : группы электронных блоков. Прибор содержит оптико-механическую и электронную части. , Онтико-механическая часть включает I (фиг. 1) зрительную трубу 1 с объективом V .2, жестко скрепленную с оправой объектива, визирную призму 3, диафрагму 4, неподвижную маску 5 с серией параллельных рабочих щелей, установленную в фокальной плоскости, подвижную маску б с одной щелью, расположенную вплотную с неподвижной мае- ; кой 5, и фотоприемник 7, установленный за масками близ фокальной плоскости. Д 1афраг-. ма 4 снабжена приводом 8, маска 6 для установки ее в требуемое положение также имеет привод 9, например, червячный. Серию рабочих щелей неподвижной маски 5 располагают по отношению к призме 3 таким образом, чтобы их проекции на небес1гую сферу были параллельны плоскости горизонта. Вся оптическая система и фотопргюмник 7 укреплены в корпусе 10. В совокупности они образуют зрительную трубу, предназначенную для визирования светил. Корпус 10 зрительной трубы подвешивают как маятник на внутренней раме 11 карданного подвеса, а его внешнюю раму 12 устанавливают на подшипнике 13. Подшипник 13 опирается на внутреннюю поверхность ; нижнего основания цилиндра 14, который служит верхней частью кожуха,- и вместе с установленной на чем внешней рамой 12 приводится в движение относительно нг1жней части 15 кожуха через исполнительные механизмы кинематической связи 16 электродвигателем 17. Собственно кожух выполнен в виде стоящих один на другом двух цилиЕшров, состыкованных своими Основаниями так, что ци- линдр 14. большего диаметра расположен цилиндром 15с меньшим диаметром. В верхней части цилиндра 14 находится круговой иллюминатор 18. В нижней части цилиндра 15 смонтирована система глубоко1 о нивелирования, содержащая подъемные винты 19, два из которых приводятся в движение реверсивными двигателями 20 с червячными передачами. Управляют двигателями 20 с помощью трех емкостных датчиков. 21. 3 цилиндре 15 смонтирована система арретирования 22 с исполнительными механизмами 23 .(например, электромагнитными фиксаторами). Электронная часть (фиг. З) состоит из
: командного блока 24, запоминающего устройства 25 для заблаговременной закладки установок, дешифратора команд 26, блока 27 программного управления системой грубого нивелирования, блока 28 управления g подвижной маской 6, блока 29 управления .разворотом зрительной трубы, анализатора импульсов 30 фотоприемника 7, блока 31 хранения бортового времени и блока 32
сравнения импульсов фотоприемника 7 с бор-ю товым временем. Результатами измерения служат данные о моментах прохождения д. звезд через щели неподвижной маски 5 в системе бортового времени.
Указанные p.bjuje блоки соединены i меж- 15 ду собой в следующей последовательности:
командный блок 24 связан одновременно с ; запоминающим устройством 25, дещифратО:-: ром команд 26 и блоком 31 хранения бортового времени. Запоминающее устройство 20 25 тоже связано с дешифратором команд 26, Последний соединен с блоком 27 программного управления системой грубого нивелирования и блоком 28 управления подвижной маской 6. Кроме того, деши Ьратор ко- .25 манд 26 имеет связь с исполнительными механизмами, в число которых входит привод 8 диафрагмы 4, привод 9 подвижной маски 6, электродвигатель 17 подшипника . 13 и электромагнитные фиксаторы 23 сие-; 30 темы арретирования 22. С исполнительны- . ми механизмами связаны также блок 27 программного управления системой грубого нивелирования, блок 28 управления подвижной маской 6 и блок 29 управления разво- 35 ротом зрительной трубы 1, Дешифратор ко- мавд 26 связан с блоком 29управления разворотом зрительной трубы 1, который имеет обратную связь с анализаторов импульсов фотоприемника 7. Фотоприемник 7 имеет канал связи с блоком 32 сравнения импульсов фотоприемника с бортовым вре- менем, который вводится в блок 32 из блока 31 хранения бортового времени. Кроме того, блок 32 связан с системой передачи : информации на командный пункт, который может находиться на Земле. В комплекс командного пункта входят п ередающие и приемные устройства.
Доставленный на поверхность планеты
астроприбор устанавливают на ровном и твердом грунте. Командный пункт подает
на командный блок 24 сигнал на включение прибора. После того, как зрительная труба 1 путем выключения электромагнитных фиксаторов 23 разарретируется, выполняется заложенная в блоке 27 программа грубого
нивелирования прибора с помощью подъемных винтов 19 и емкостных датчиков 21,
-. 1 60
которая включается через дешифратор команд 26. После выполнения программы цилиндр 15 прибора оказывается отнивелированным с точностью ± 5 , а зрительная труба 1 занимает вертикальное положение. В дальнейщем прибор ориентируется по Солнцу. Перед этим объектив зрительной трубы дна- фрагмируется диафрагмой 4 с помощью привода 8. При этом порядок взаимодействия , частей и механизмов аналогичен описывае, мому ниже порядку звездных наблюдений. Все эти операции осуществляются одно- кратно.
По окончании процесса ориентации можно начинать собственно наблюдения. По сигналам скомандного пункта исполнительные механизмы кинематической связи и электродвигатель 17 осуществляют разворот зрительной трубы 1 для визирования в заданном азимуте. При этом в соответг; ствии с программой, заложенной в блок 28 управления подвижной маской 6, последняя устанавливается в зависимости от азимута таким образом, что ее щель оказываетсянаклоненнойна определенный угол по Отношению к щелям неподвижной ; маски 5. Разворот зрительной трубы 1 продолжается до появления сигнала в фоа оприемкике 7, Выдача сигнала фотоприемником 7 означает попадание звезды в наклонную щель маски 6,
Последуюи|ие действия по наблюдению каждой звезды состоят в следующем.
Сигнал фотонриемн 1ка 7 проходит через анализатор имцульсов ЗО, который, разрьы, вая электрическую цепь, останавливает разворот трубы. В дальнейшем за счет осевого вращения планеты звезда движется вдоль шели маски 6. Сигнал от звезды .исчезает после экранирования света непрозрачным участком неподвижной маски 5. При последующем пересечении звездой рабочих щелей маски 5 фотоприемннк 7 регистрирует се- рню импульсов, которые через анализатор импульсов ЗО сравниваются с бортовым временем, что и составляет результат на- . блюдений. После наблюдения звезды по командам с пункта упрагзления или с запо- минающего устройства 25-в описанном выше nopjmKp;. осуществляется разворот зри- тельной для визирования в новом
азимуте следующего прохождения. Работа прибора происходит сеансами,
каждый из которых содержит наблюдения i нескольких звезд, по возможности равномерно распределенных по азимуту.
Предмет изобр е т я
1. Прибор для фотоэлектрической регистрации прохождений звезд, гсредназначенных преимущественно для набл1оде1пш на | Луне и других планетах, содержащий за- ключенных в кожух с иллюминатором зри- тельную трубу с механизмом разворота ее по азимуту, фотоприемннк с установленной 5 вблизи фокальной плоскости объектива трубы неподвияшой маской со щелями, объективную диафрагму и электронную схему выделе- ниа полезного сигнала и управлениз исполнительными механизмами, включающую команд- 0 ньй блок, дешифратор командрлок хранения бортового времени,запоминающее устройство, отличающийся тем, что, с целью автоматизации процесса установки трубы ;относительно местной вертикали и разворо- js та ее в горизонтальной плоскости с одновременным повышением точности регистрации, корпус зрительной трубы снабжен системами арретироваЕ1Ия и грубого нивелирования и вывешен во внутренней раме карданного 20 подвеса, внешняя рама которого расположе- па на подшипнике, установленном внутри кожуха и кинематически связанном с приводом, перед объективом зрительной трубы
-8
установлена призма, жестко связанная с | оправой объектива, а между ненодвижной маской и фоторпиемником встроена с возмон ;1 остью вращения в плоскости дополни- ; тельная маска с диаметральной щелью, причем в электронную схему введэны блоки управления системой грубого нивелирования и допол1штель {ой маской, входы которых соответственно соединены с блоком , управления разворотом трубы и дешифрато-1 ром, а выходы - с исполннтегшными органами последних.
2,Прибор по п. 1, о т л и ч а ю щ и й-,. с я тем, что/ система арретирования вы- .
полнена в виде электромагнитных фиксато-j ров, расположенных по периметру корпуса . трубы и внутренней поверхности Koxtyxa.
3.Прибор по пп, 1 и 2, о т л и ч а ющ и и с я тем, что система грубого ниве- лирования выполнена в виде емкостных датчиков, расположенных на внутренней поверхпости кожуха и через реверсивные двигатеяи связанных с подъемными винта- ми.
25 Ч ЧЗ 3k
Фиг. A
Фив.2
cz e ee
.
§5
§
«si

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАРТОГРАФИРОВАНИЯ НЕБЕСНОЙ СФЕРЫ И КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014252C1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| Система калибровки и тестирования звездного датчика ориентирования | 2023 |
|
RU2811666C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| Устройство для определения географических координат | 1948 |
|
SU84533A1 |
| Устройство измерения высоты небесных светил | 2022 |
|
RU2794558C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |