Изобретение относится к технике грузоподъемных механизмов, в частности к лебедочным комплексам.
Известно устройство для определения натяжения в тросе, состоящее из измерительного троса, закрепленного с двух концов через датчики силы к опорам. К измерительному тросу шарнирно прикреплен подвесной блок со шкивом и грузовым тросом так, что ветви измерительного троса являются примерно зеркальным отображением грузового троса. Датчики силы шарнирно подвешены на опоре и подключены к вычислительному блоку.
На результатах определения натяжения с помощью такого устройства сказываются погрешности от измерения четырех параметров, что не позволяет проводить точные измерения. Другим его недостатком является неудобство его при эксплуатации из-за несовершенства процесса регистрации.
Целью изобретения является повышение точности и удобства эксплуатации.
Для достижения цели в устройство для определения натяжения в тросе, содержащее опору, подвесной блок со шкивом, соединенный с датчиком силы, шарнирно подвешенным на опоре, вычислительный блок, подключенный к датчику силы, введен угломер, включающий в себя валик, установленный на подвесном блоке, связанный с валиком датчик угла его поворота и тягу, закрепленную на валике с возможностью взаимодействия своим концом с тросом. При этом валик расположен параллельно геометрической оси шкива, а датчик угла поворота валика связан с вычислительным блоком.
Указанная совокупность признаков позволяет определять натяжение в тросе всего лишь по двум параметрам (силе и углу), что повышает точность и обеспечивает автоматизацию процесса регистрации, что повышает удобство эксплуатации.
Предложенное угломерное устройство может быть установлено на внешней стороне обоймы блока в любой точке при условии параллельности оси преобразователя и оси шкива. Корпус датчика угла поворота жестко закрепляется к блоку, а подвижный его элемент соединяется с тягой, имеющей в момент измерения контакт с тросом.
Наиболее предпочтительное место для установки угломерного устройства - ось, вокруг которой вращается шкив. При этом ось измерительной тяги датчика должна быть продолжением осевой линии шкива. При таком варианте реализуется наиболее простая и эффективная функциональная связь между углом изгиба троса и углом поворота тяги.
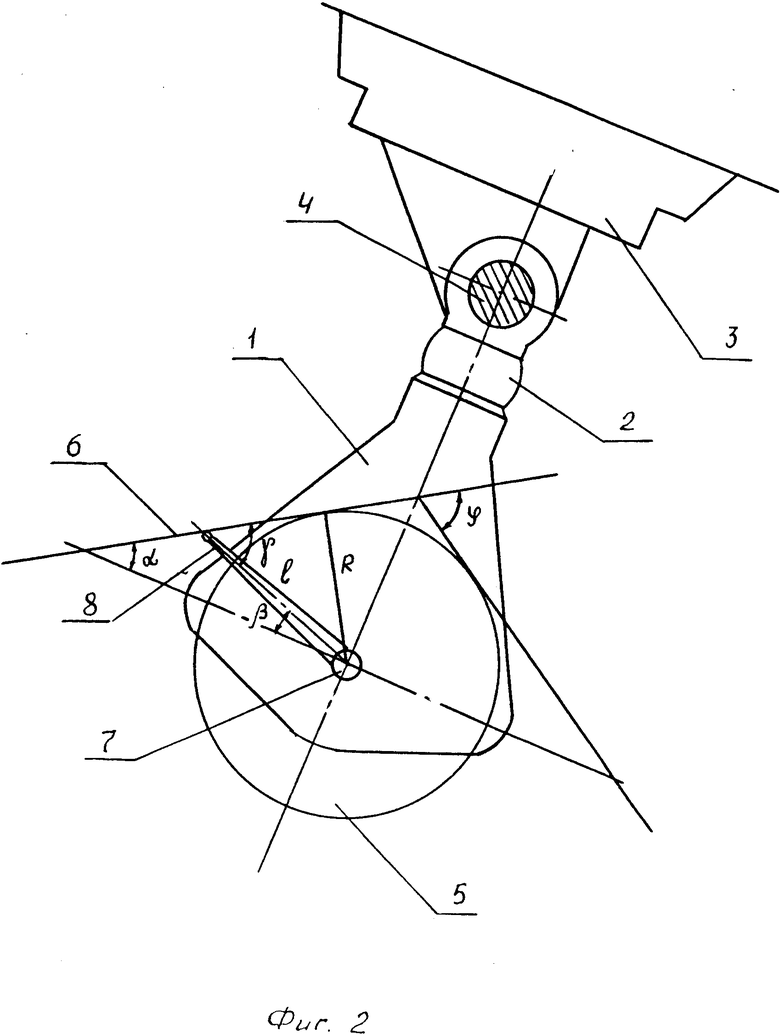
На фиг. 1 изображен вариант устройства, общий вид (без вычислительного устройства); на фиг. 2 дана функциональная зависимость угловых величин, возникающая при использовании предложенного устройства.
Устройство (без вычислительного устройства) состоит из подвесного блока 1, прикрепленного к датчику 2 силы, который в свою очередь подвешен к опоре 3 через шарнир 4. Через шкив 5 блока 1 проходит трос 6. На внешней стороне обоймы блока 1 укреплен угломер, состоящий из датчика 7 угла поворота и Г-образной тяги 8. При этом ось вращения тяги 8 должна быть параллельна или совпадать с осевой линией шкива. Кроме того, α - угол, равный половине угла изгиба ϕ троса на шкиве блока; β - угол между перпендикуляром к плоскости симметрии блока, проходящей через ось шкива, восстановленный от оси вращения измерительной тяги и самой тягой 8; γ - угол между ветвью троса 6 и тягой 8 угломера; R - радиус шкива по канавке; l - длина тяги 8.
Устройство работает следующим образом.
При натяжении троса, в зависимости от взаимного расположения коренной и ходовой ветвей троса 6, блок 1 вместе с датчиком 2 силы отклонится от вертикали так, что ϕ= 2α (1)
Это равенство основано на допущении, что при реально действующих на блок нагрузках влияние собственной массы блока на соотношение углов несущественно α= γ-β (2) sinγ =  = Const (3)
= Const (3)
Таким образом, угол γ может быть определен как постоянная величина из геометрического соотношения радиуса канавки шкива и длины тяги угломерного устройства, а измеряемый этим устройством угол β функционально связан с расчетным углом α.
Обобщенно величину натяжения троса можно определить по формуле T =  , (4) где γ вычисляют по формуле (3) и используют как постоянную величину, а Р и β получают как сигналы датчиков силы и угла.
, (4) где γ вычисляют по формуле (3) и используют как постоянную величину, а Р и β получают как сигналы датчиков силы и угла.
Реализовать тригонометрическую зависимость (4) можно либо в датчике угла поворота, например, при помощи функционального потенциометра, либо в решающем устройстве. При изменении радиуса канавки шкива, например, вследствие износа или замены шкива, функциональную зависимость корректируют, вычисляя новую постоянную γ . Измерительная тяга может быть подпружинена для обеспечения постоянного контакта с тросом или снабжена исполнительным механизмом, который осуществляет поворот тяги и прижим ее к тросу в момент измерения угла изгиба троса.
Технико-экономический эффект от использования устройства может быть получен путем повышения удобства эксплуатации за счет непосредственного измерения угловой величины при помощи известных угломерных преобразователей общепромышленного назначения для телеметрического ввода информации об угле изгиба троса в решающее устройство.
Устройство может быть использовано также для автоматического выравнивания нагрузок в двух параллельно работающих по одному назначению лебедках (например, на судах-траулерах), предупреждать случаи опасных перегрузок. (56) Патент ГДР N 210974, кл. G 01 L 5/04, 1984.
Использование: техника грузоподъемных механизмов. Сущность изобретения: устройство содержит опору 3, подвесной блок 1 со шкивом 5 и датчик 2 силы. Датчик 2 силы шарнирно подвешен на опоре 3 и соединен с подвесным блоком 1. Установленный на подвесном блоке 1 валик 7, связанный с датчиком угла его поворота, и закрепленная на валике 7 тяга 8 образуют угломер. Тяга 8 установлена с возможностью взаимодействия своим концом с тросом 6. Валик 7 расположен параллельно геометрической оси шкива 5. Датчик угла поворота валика 7 и датчик 2 силы подключены к вычислительному блоку. 2 ил.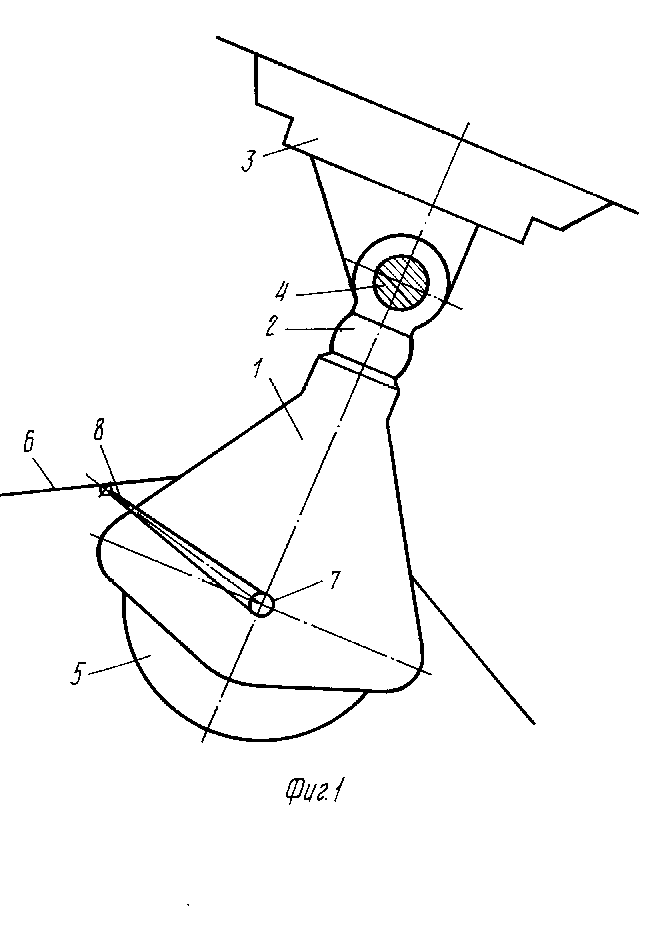
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАТЯЖЕНИЯ В ТРОСЕ , содеpжащее опоpу, подвесной блок со шкивом, соединенный с датчиком силы, шаpниpно подвешенным на опоpе, и вычислительный блок, подключенный к датчику силы, отличающееся тем, что, с целью повышения точности и удобства в эксплуатации, оно снабжено угломеpом, включающим в себя валик, установленный на подвесном блоке, связанный с валиком датчик угла его повоpота и тягу, закpепленную на валике с возможностью взаимодействия своим концом с тpосом, пpи этом валик pасположен паpаллельно геометpической оси шкива, а датчик угла повоpота валика связан с вычислительным блоком.
