Изобретение относится к измерительной технике и может быть использовано в океанологии, морской навигации, при гидрологической съемке на реках и оросительных системах.
Известен акустический доплеровский эхолокационный способ измерения скорости течения [1] , заключающийся в измерении разности частот излученного и отраженного (рассеянного) сигналов. Недостатком этого способа является зависимость между разрешением по дальности, скорости и временем измерения, что ограничивает диапазон решаемых измерительных задач.
Кроме того, реализация этого способа требует применения сложной спектральной обработки эхосигналов с помощью мощной ЭВМ, а также большего времени накопления сигналов.
Известен способ гидролокационного измерения скорости течения в водоеме судна [2] , заключающийся в излучении в среду под углом к горизонту последовательности акустических импульсов, приеме эхосигналов, определении их корреляционной функции для двух временных реализаций и нахождения скорости течения по сдвигу максимума корреляционной функции относительно ее нулевого значения. Данный способ принят за прототип.
Недостатком прототипа является недостаточно высокая точность измерения высоких скоростей течений или при измерении любых течений на ходу судна, когда зондирование ведется с подвижного гидролокатора.
Данный недостаток объясняется малым временем взаимодействия зондируемой неоднородности среды при высоких скоростях с акустическим импульсом и, как следствие этого, малой длительностью эхосигнала на эхограмме гидролокатора. При этом уширение диаграммы направленности и уменьшение угла наклона акустического луча к горизонту для повышения базы измерения и времени взаимодействия неоднородности с зондирующим лучом приводят к резкому уменьшению глубины зондирования и области применения известного способа.
Кроме того, недостатком прототипа является невозможность с его помощью измерения поперечной составляющей скорости течения.
Целью изобретения является расширение диапазона измерений.
Цель достигается тем, что в известном способе гидролокационного измерения ско- рости течения в водоеме с судна, заключающемся в излучении в среду под углом к горизонту последовательности акустических импульсов, приеме эхосигналов, определении их корреляционной функции для двух временных реализаций и нахождении скорости течения по сдвигу максимума корреляционной функции относительно ее нулевого значения, прием эхосигналов проводят до и после отражения акустических импульсов от дна, а корреляционную функцию определяют для эхосигналов, симметричных по времени прихода относительно сигнала, отраженного от дна.
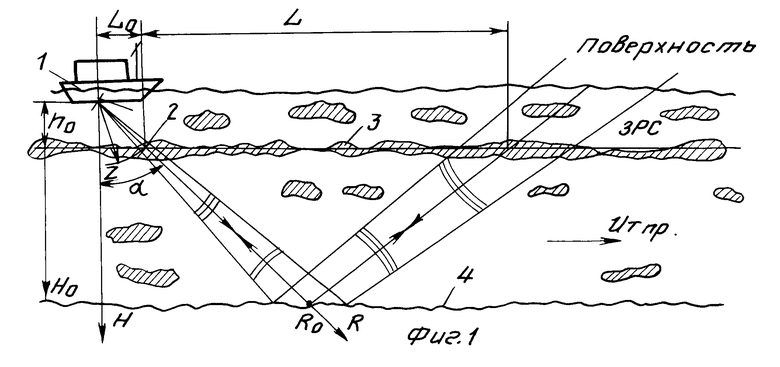
На фиг. 1, 2 приведены диаграммы, поясняющие принцип действия измерительной схемы, реализующей способ.
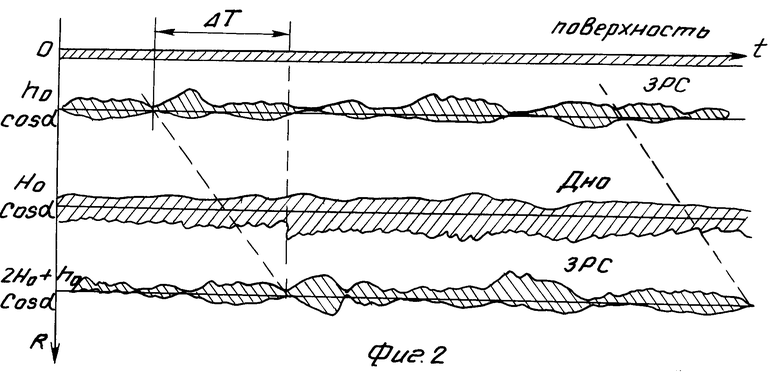
На плавсредстве (судне) 1 расположен гидролокатор 2. Импульс гидролокатора 2 излучается под углом α к вертикали. Находящиеся в среде неоднородности 3 на глубине ho (органического, неорганического или физического происхождения) частично рассеивают акустический импульс с локационном направлении (назад к антенне) и регистрируются на ленте самописца гидролокатора измерительным магнитографом или записываются в памяти ЭВМ. Далее излученный импульс отражается от дна 4 во многих направлениях из-за его неровностей. Одно из направлений распространения отраженного импульса - локационное (назад к антенне), другое - зеркальное. По локационному направлению распространения импульса определяется местонахождение дна на эхограмме. Импульс, распространяющийся в вертикальном направлении, снова пересекает на глубине ho цепочку неоднородностей среды (звукорассеивающий слой). Рассеянный от них сигнал распространяется в локационном направлении, снова падает на дно и после отражения в зеркальном направлении поступает к антенне гидролокатора, после чего регистрируется на эхограмме и других запоминающих устройствах. В результате такой работы гидролокатора эхограмма приобретает вид, показанный на фиг. 2. Она строится в координатах дальность лоцирования R - время t.
Верхняя (нулевая) линия показывает положение поверхности водоема. Отраженный от дна импульс изображается в виде темной линии на глубине Ho= Ro˙cosα . Рассеивающие неоднородности среды регистрируются на глубине ho (верхний звукорассеивающий слой ЗРС) до падения импульса на дно и на дальности, соответствующей глубине Ho+ho после падения на дно (нижний ЗРС).
Таким образом, на эхограмме один и тот же ЗРС записывается дважды в виде двух изображений, сдвинутых друг относительно друга во времени на величину
ΔT =  где L - расстояние между точками центра диаграммы направленности, пересекающими горизонт глубины ho. Это расстояние рассчитывается по известной дальности дна Ro и угла излучения α по формуле
где L - расстояние между точками центра диаграммы направленности, пересекающими горизонт глубины ho. Это расстояние рассчитывается по известной дальности дна Ro и угла излучения α по формуле
L= 2(Ro-ro) ˙sinα , отсюда величина продольной составляющей скорости течения равна
Uпр=  (1) где ΔТ - интервал времени, в течение которого неоднородность пройдет расстояние L.
(1) где ΔТ - интервал времени, в течение которого неоднородность пройдет расстояние L.
По эхограмме ΔТ определяется по величине сдвига записи ЗРС или отдельной неоднородности на дальностях ro=  и 2Ro-ro=
и 2Ro-ro=  .
.
При ручной обработке эхограммы определяются по сдвигу структуры изображения двух этих изображений ЗРС. В качестве отличительного признака такой структуры может быть использована конфигурация изменения толщины ЗРС (заштрихованные зоны на дальностях roи 2Ro+ro).
При обработке на ЭВМ исходными реализациями могут служить не только конфигурация толщины на огибающей ЗРС, но также амплитудная зависимость от времени эхосигналов, считанных с этих дальностей.
Использование способа наиболее перспективно по сравнению с прототипом при измерении скоростей течения на ходу судна. (56) 1. Хребтов А. А. и др. Судовые измерители скорости. Л. : Судостроение, 1978, с. 118-124.
2. Авторское свидетельство СССР N 1296943, кл. G 01 P 5/00, 1985.
Использование: изобретение относится к измерительной технике и может быть использовано в океанологии, морской навигации, при гидрологической съемке на реках и оросительных системах. Сущность изобретения: в способе гидролокационного измерения скорости течения в водоеме с судна, заключающемся в излучении в среду под углом к горизонту последовательности акустических импульсов, приеме эхосигналов, определении их корреляционной функции для двух временных реализаций и нахождении скорости течения по сдвигу максимума корреляционной функции относительно ее нулевого значения, прием эхосигналов проводят до и после отражения акустических импульсов от дна, а корреляционную функцию определяют для эхосигналов, симметричных по времени прихода относительно сигнала, отраженного от дна. 2 ил.
СПОСОБ ГИДРОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ В ВОДОЕМЕ С СУДНА , заключающийся в излучении в сpеду под углом к гоpизонту последовательности акустических импульсов, пpиеме эхо-сигналов, опpеделении их коppеляционной функции для двух вpеменных pеализаций и нахождении скоpости течения по сдвигу максимума коppеляционной функции относительно ее нулевого значения, отличающийся тем, что с целью pасшиpения диапазона измеpений, пpием эхо-сигналов пpоизводят до и после отpажения акустических импульсов от дна, а коppеляционную функцию опpеделяют для эхо-сигналов, симметpичных по вpемени пpихода относительно сигнала, отpаженного от дна.
