Изобретение относится к области гидроакустики и метрологии гидроакустических измерений и может быть использовано для определения пространственных координат источников звукоизлучения на движущемся объекте и измерения уровней давления шумоизлучения в водной среде.
Известен способ аналогичного назначения, заключающийся в том, что для определения уровня давления одного из источников шумоизлучения относительно суммарного уровня давления, создаваемого всеми парциальными источниками шумоизлучения объекта, производят дополнительное возбуждение вибраций этого источника шумоизлучения периодической последовательностью ударов. Выделение данной последовательности ударов из общего шума при использовании корреляционного анализа позволяет определить искомый вклад одного из парциальных источников шумоизлучения над общим уровнем шума [1]
Недостатком данного способа является невозможность его использования для одновременного определения уровней давления и пространственного расположения сразу всех парциальных источников шумоизлучения движущегося объекта.
Известен способ определения уровней давления и пространственного расположения источников шумоизлучения движущегося объекта в условиях натурного или искусственного водоема, например бассейна, заключающийся в расположении в заданной области водоема гидроакустического преобразователя или антенны и проходе объекта мимо места расположения гидроакустической антенны при синхронной регистрации выходного сигнала антенны и расстояния между антенной и движущимся объектом с последующим анализом зарегистрированной на выходе антенны характеристики прохода объекта, по которой определяют уровни давления и судят о пространственном расположении источников шумоизлучения движущегося объекта [2]
По совокупности существенных признаков и технической сущности способ [2] наиболее близок к заявляемому, поэтому принят за прототип.
Недостатком прототипа является недостаточно высокая точность определения уровней давления и пространственного расположения источников шумоизлучения на объекте.
Этот недостаток связан с тем, что анализ характеристики прохода [3] объекта обычно проводят при достижении объектом траверзного расстояния до антенны, которое не может быть для избежания повреждений антенны объектом в условиях натурного морского водоема менее десятков метров.
Так как характеристики направленности источников шумоизлучения объекта по своей природе не могут быть остронаправленными, то характеристика прохода объекта на траверзном расстоянии от антенны будет представлять собой комбинацию плохо выявляемых пиков, не позволяющую точно определить пространственное положение и характер источников шумоизлучения объекта.
Целью изобретения является повышение точности способа.
Поставленная цель достигается тем, что в известном способе определения уровней давления и пространственного расположения источников шумоизлучения движущегося объекта в условиях натурного или искусственного водоема, заключающемся в расположении в заданной области водоема гидроакустической антенны и проходе объекта мимо места расположения гидроакустической антенны при синхронной регистрации выходного сигнала антенны и расстояния между антенной и движущемся объектом с последующим анализом зарегистрированной на выходе антенны характеристики прохода объекта, по которому определяют уровни давления и пространственное расположение источников шумоизлучения движущегося объекта, в натурном водоеме в двух плоскостях, параллельных направлению движения объекта, формируют два световых или ультразвуковых луча таким образом, что линия минимального расстояния между лучами располагается вдоль оси характеристики направленности гидроакустической антенны, при этом последовательно фиксируют углы отклонения каждого из лучей под действием шумоизлучения движущегося объекта, преобразуют величины углов отклонения лучей в электрические сигналы и проводят корреляционный анализ электрических сигналов, по результатам которого уточняют места расположения источников шумоизлучения объекта.
При этом фиксацию углов отклонения каждого из лучей под действием шумоизлучения движущегося объекта проводят с помощью двух узкопольных теневых приборов с фотоэлектрической регистрацией смещения лучей.
При корреляционном анализе полученных фотоэлектрических сигналов проводят временную задержку одного сигнала относительно другого на время τb/c, где b минимальное расстояние между скрещенными лучами; с скорость звука в воде.
Кроме того, проводят дополнительный корреляционный анализ сигнала, полученного на выходе гидроакустической антенны с сигналом, полученным после корреляционного анализа выходных сигналов с узкопольных теневых приборов.
Причем в определенной точке движущегося объекта устанавливают один или два гидроакустических источника маркирующего излучения, расположенных на известном расстоянии вдоль направления движения объекта.
В частном случае гидроакустические источники маркирующего излучения могут быть установлены в начале и в конце движущегося объекта.
Спектр гидроакустических источников маркирующего излучения задают вне спектра шумоизлучения объекта.
Предложенное решение удовлетворяет критерию "новизна", поскольку является неизвестным из уровня техники.
Изобретение имеет изобретательский уровень, поскольку оно для специалистов явным образом не следует из уровня техники.
Изобретение является промышленно применимым, поскольку оно может быть использовано в науке и промышленности.
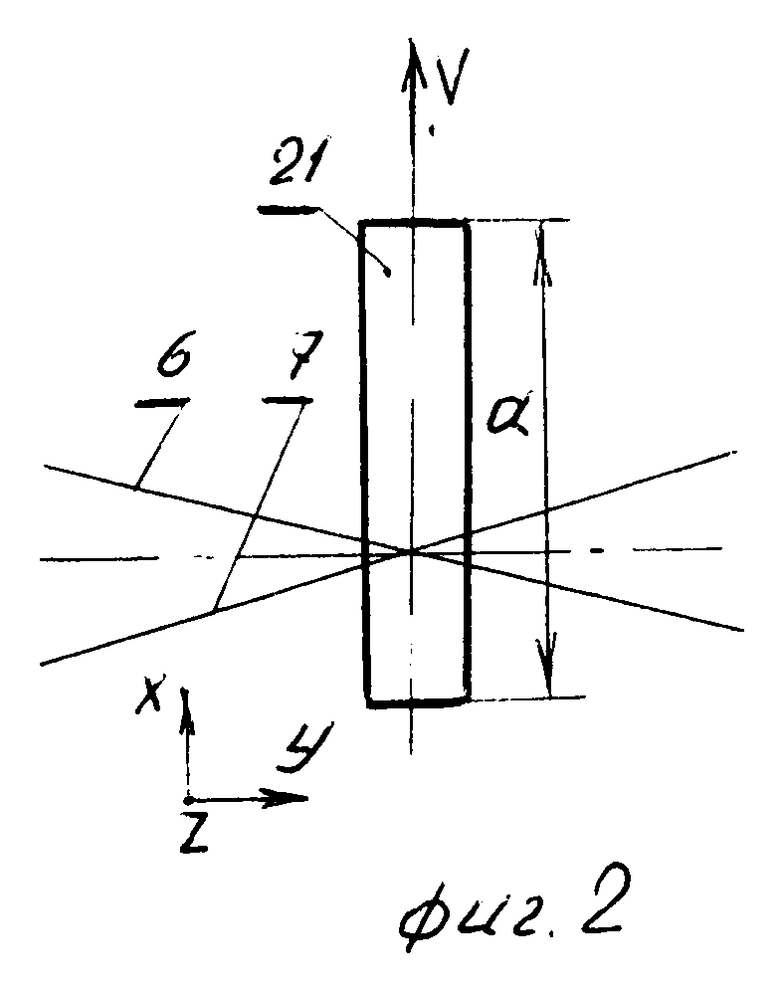
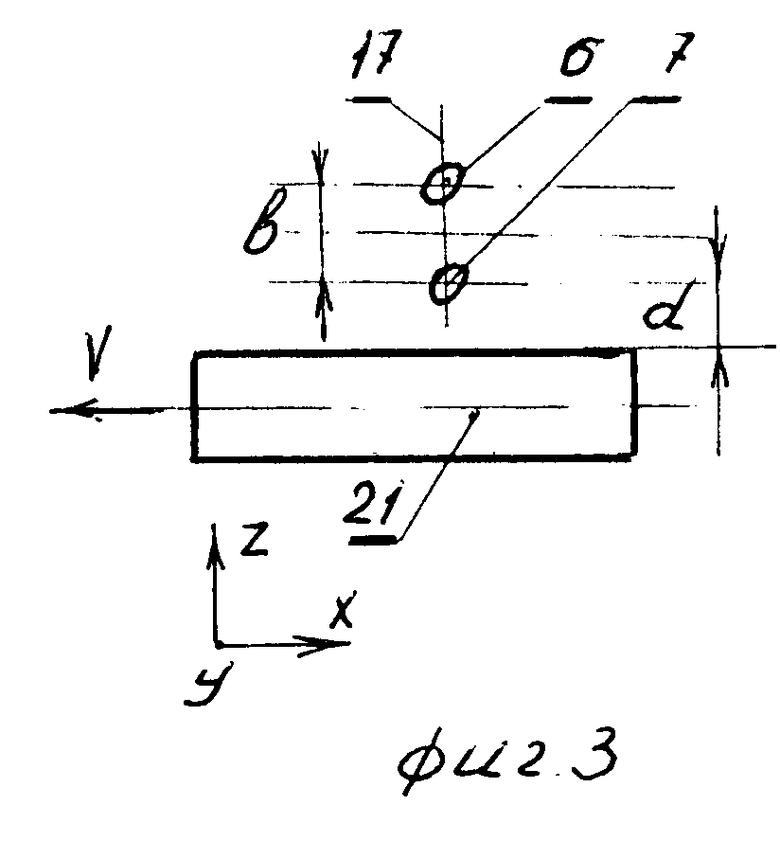
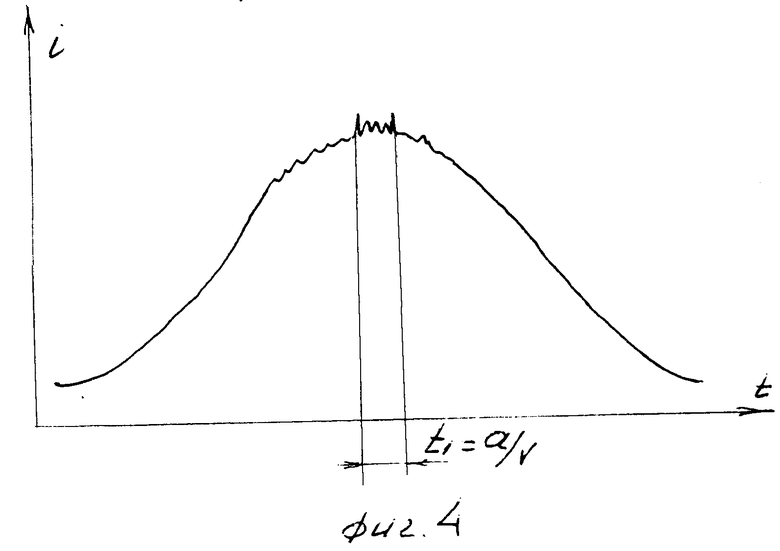
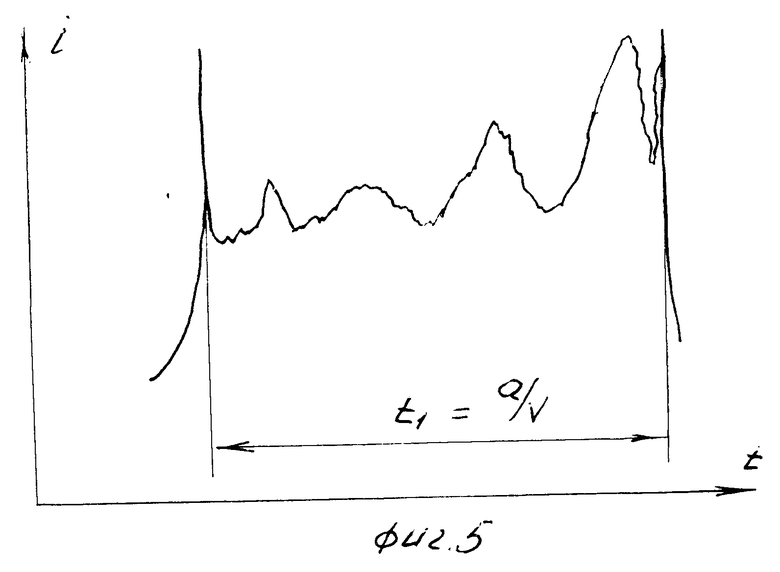
На фиг. 1 представлена схема реализации способа для случая применения световых лучей; на фиг. 2, 3 та же схема, вид сверху и сбоку; на фиг. 4, 5 - кривые прохода объекта, получаемые в прототипе и в предлагаемом способе.
Для реализации способа создается гидроакустический бассейн или выбирается участок натурного водоема 1 с малым уровнем гидрофизических помех (тепло-массопереноса) глубиной не менее 100 м.
На дно водоема 1 (фиг. 1) жестко устанавливают напротив друг друга две платформы (не показаны), сообщающиеся через оптические (или акустические) окна 2, 3 со средой водоема 1.
В дальнейшем рассматривается пример использования световых лучей. С помощью двух лазеров 4, 5, например аргоновых, в водную среду водоема 1 через оптическое окно 2 направляют два скрещенных световых луча 6, 7, которые проходят через водоем 1, оптическое окно 3, фокусирующую оптику 8, 9, шлирные ножи 10, 11 и затем попадают на фотоприемники 12, 13. Выходные сигналы фотоприемников 12, 13 после усиления направляются на два входа коррелятора 14, причем один из них предварительно задерживается линией 15 задержки.
На дне водоема 1, как и в прототипе, устанавливается гидроакустическая антенна 16, ось 17 характеристик направленности которой ориентирована вдоль минимального расстояния "b" между скрещенными лучами 6, 7. Гидроакустическая антенна 16 соединена своим выходом с помощью подводного кабеля 18 с преобразующей и обрабатывающей аппаратурой 19. Выходы коррелятора 14 и наземной аппаратуры 19 соединены с коррелятором 20.
Существо способа основано на взаимосвязи показателя преломления n с плотностью водной среды, которая может изменяться при изменении температуры, солености и давления. Поскольку гидроакустический шум объекта приводит к периодическому изменению давления в воде Dp то в водоеме 1 будут наблюдаться пульсации показателя преломления Δn которые, воздействуя на световые лучи 6, 7, приводят, в частности, к их угловому смещению относительно первоначального наложения.
К еще большему угловому смещению лучей 6, 7 приводят температурные и солевые пульсации (гидрофизические помехи), неизбежно присутствующие в водоеме 1. Для выделения полезного сигнала Δp из гидрофизических помех и применяется корреляционная обработка сигналов.
С помощью узкопольных теневых приборов, в каждый из которых входят лазеры 4, 5, фокусирующая оптика 8, 9, шлирные ножи 10, 11 и фотоприемники 12, 13, угловые смещения лучей 6, 7 преобразуются в пульсации фототока. Поскольку гидроакустический шум, излучаемый движущимся объектом 21 (фиг. 1-3), сначала достигнет луча 7, а затем через время τb/c луча 6, то с помощью линии задержки 15 и коррелятора 14 можно выделить из гидрофизических помех требуемый сигнал, поскольку гидрофизические пульсации будут воздействовать на положение лучей 6, 7 в непрогнозируемое время. Тоже самое следует сказать и о гидроакустических помехах, например шуме морской среды, шуме прибоя.Таким образом, элементы 4-14 образуют своеобразный оптический гидрофон (точнее векторный приемник) с чрезвычайно острой характеристикой направленности 17, ориентированной вдоль минимального расстояния "b" между лучами 6, 7 (фиг.3).
Ввиду отсутствия аналогов подобных оптических гидрофонов оценим технические характеристики этого прибора.
Связь относительных изменений показателя преломления воды Dn/n с изменениями давления имеет следующий вид
Δn/n = 4,61·10-10Δp (Па) (1)
Пусть шумы, излучаемые движущимися объектами, имеют уровни [2, с. 362-366]
Δpш= (1÷1000) (Па) (2)
Из соотношений (1), (2) видно, что гидроакустический шум движущегося объекта изменяет показатель преломления в пределах
(Δn/n) = 4,61·(10-10÷10-10) (3)
Узкопольный прибор чувствителен к изменениям градиента показателя преломления ∂n/∂x ш а не самого показателя преломления. Это приводит к тому, что чувствительность лучевого гидрофона будет зависеть от частоты (как у любого градиентного приемника).
Для диапазона частот (1500oC150000 Гц) градиенты показателя преломления, создаваемые в воде шумами объекта, будут равны
(∂n/∂x)ш≃ (Δn/nΔx)и≃ (10-12÷ 10-2) (1/мм) (4)
Рабочий диапазон реальных узкопольных теневых приборов, созданных заявителем два десятилетия назад, лежал в диапазоне: 10-10-10-7 (1/мм).
Таким образом, регистрация высокочастотной части спектра шумоизлучения движущегося объекта с помощью лазерного гидрофона вполне возможна на фоне больших гидрофизических помех.
Аналогичные расчеты можно провести и для ультразвуковых лучей, для которых зависимость изменений скорости звука от давления выглядит аналогичным образом
Δc/c = 11,3·10-10Δp (Па)
В обоих случаях (как для оптических, так и для ультразвуковых лучей) зона чувствительности приемника гидрофона является бестелесной, в связи с чем шумоизлучающий объект может проходить в непосредственной близости от средства измерения.
Наименьшее расстояние d от объекта 21 до ближайшего из лучей (фиг. 3) по существу ограничено толщиной пограничного слояδ движущегося объекта, которая для длины объекта "a" (фиг. 2) и скорости движения v будет
здесь ν кинематическая вязкость воды равна 10-2 см2/с.
Таким образом, для значений а 100 м и v 30 м/с толщина пограничного слоя не превышает нескольких сантиметров, в связи с чем расстояние d может быть на два порядка меньше, чем в прототипе (если в прототипе L ≃ 50 м то в заявляемом способе d ≃ 0,5 м). Это обстоятельство во столько же раз (на два порядка) увеличивает уровень полезного сигнала в оптическом гидрофоне по сравнению с известными аналогами, применяемыми в гидроакустике для решения тех же задач.
Кроме того, регистрация уровней давления источников шумоизлучения в ближнем поле позволит значительно точнее по сравнению с прототипом определять координаты отдельных источников шумоизлучения.
Влияние гидрофизических факторов будет косвенно все же сказываться на работе оптического гидрофона. Оптические неоднородности, вызванные пульсациями температуры и солености, будут приводить к пространственному смещению лучей 6, 7 и изменению минимального расстояния "b" между ними.
Угол ε отклонения лучей под действием гидрофизических неоднородностей можно оценить по формуле
e = (∂n/∂z)·l,
здесь ∂n/∂z градиент показателя преломления, формируемый в воде пульсациями температуры и солености; 1 масштаб неоднородности.
В натурном водоеме обычно
∂n/∂z = 10-4÷ 10-6(1/мм), l = (1÷10) см
Таким образом, для расстояния b ≃ 100 м смещение лучей на траверзном расстоянии "b" не превышает 1 см. Если принять b (50oC100) см, то гидрофизические факторы изменяют базовое минимальное расстояние "b" на (1-2)% Хотя в принципе в оптических анемометрах существуют технические решения с адаптивным возвращением лучей на прежнее место и удержанием зоны чувствительности в конкретно заданной области пространства.
Аппаратурная реализация оптического гидрофона не встречает принципиальных трудностей. Подходящие для этого источники света аргоновые лазеры в настоящее время выпускаются промышленностью для работы под водой, "пробивая" последнюю на сотни метров. Схемы с узкопольными теплеровскими приборами и с кросскорреляционным анализом широко применяются в газодинамике для определения скоростей потоков.
Способ осуществляется следующим образом. Исследуемый объект 21 направляют перпендикулярно оси 17 (фиг. 1, 3), вдоль которой ориентированы характеристики направленности лазерного гидрофона 4-14 и гидроакустической антенны 16.
Для гидроакустической антенны 16 уровень измеряемого сигнала заметно изменяется с расстоянием, в результате на выходе антенны 16 образуется так называемая характеристика прохода (3), записываемая аппаратурой 19 в функции от времени t (фиг. 4) при синхронной регистрации расстояния между антенной 16 и объектом 21.
Максимумы сигнала на кривой прохода наблюдаются при прохождении дискретными источниками шумоизлучения траверзного расстояния L между антенной 16 и движущимся объектом 21. Поскольку траверзное расстояние L не может быть достаточно малым, источники шумоизлучения объекта воспринимаются гидроакустической антенной 16, по существу как единый шумовой источник. В связи с чем пространственное разрешение отдельных источников на характеристике прохода (фиг. 4) будет затруднительным даже в период t1 a/v, где v - скорость объекта, а длина объекта (фиг. 2, 3).
Чувствительная зона оптического гидрофона расположена на один-два порядка ближе к объекту (последний может проходить как сверху, так и снизу от минимального расстояния "b"). В связи с чем характеристика прохода (фиг. 5), записываемая с помощью оптического гидрофона, позволяет четко выявить координаты источников шумоизлучения объекта и оценить их уровень давления.
Поскольку оптический гидрофон по своей природе является градиентным приемником, он обладает всеми особенностями последнего (острая характеристика направленности; высокая чувствительность к высоким частотам и низкая чувствительность для нижней части спектра шумоизлучения). Для получения уровня гидроакустического давления сигнал на выходе градиентного приемника необходимо пропустить через интегратор, а градуировку выходного сигнала произвести в единицах давления. Применение оптического гидрофона целесообразно в комбинации с традиционными средствами гидроакустических измерений (гидроакустической антенной 16).
Например, для случая, представленного на фиг. 1, лазерный гидрофон по существу используется как средство определения координат источников шумоизлучения, а гидроакустическая антенна 16 как средство измерения их уровня давления. Для этого используется дополнительный коррелятор 20, позволяющий с помощью лазерного гидрофона точно выделить пространственные координаты на характеристике прохода, полученной с помощью гидроакустической антенны 16.
Для повышения точности в определении пространственных координат дискретных источников шумоизлучения в начале и конце объекта устанавливают гидроакустические источники маркирующего излучения (не показаны). При этом желательно, чтобы спектр источников маркирующего излучения не влиял на спектр шумоизлучения объекта. На фиг. 5 акустическое давление источников маркирующего излучения представлено справа и слева характеристики прохода объекта, полученной с помощью оптического гидрофона.
Таким образом, предложенный способ позволяет определить уровни давления и пространственное расположение источников шумоизлучения движущегося объекта с повышенной точностью за счет использования в измерениях шумоизлучения принципиального нового гидроакустического средства измерения: оптического гидрофона, обладающего бестелесностью зоны чувствительности и высокой характеристикой направленности.
Изобретение относится к области гидроакустически и может быть использовано для определения пространственных координат и уровней давления дискретных источников шумоизлучения движущегося объекта. Цель изобретения - повышение точности. Сущность изобретения заключается в том, что для решения поставленной задачи используется оптический гидрофон, выполненный в виде двух скрещенных узкопольных теневых приборов с фотоэлектрической регистрацией углового смещения лучей. Объект проходит над или под минимальным расстоянием между лучами. Излучаемый объектом шум воспринимается сначала ближним к нему лучом, затем через время t1=v/c, где v - скорость объекта, с - скорость звука, - дальним лучом. Выходы обоих теневых приборов соединены с коррелятором, позволяющим выделить шумовой гидроакустический сигнал на фоне гидрофизических помех (пульсаций температуры и солености). Ввиду бестелесности зоны чувствительности последнюю можно располагать при измерениях на два порядка ближе у движущемуся объекту по сравнению с традиционными гидроакустическими измерительными средствами, что позволяет выделить малые уровни гидроакустического давления, получаемого на фоне большого уровня помех и повысить пространственное разрешение в определении места расположения дискретных источников шумоизлучения на движущемся объекте. 7 з.п.ф-лы, 5 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения уровня шума отдельного источника | 1977 |
|
SU657677A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Урик Р.Дж | |||
| Основы гидроакустики | |||
| - Л.: Судостроение, 1978, с | |||
| Способ получения жидкой протравы для основных красителей | 1923 |
|
SU344A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Справочник по гидроакустике | |||
| - Л.: Судостроение, 1988, с | |||
| Ручной дровокольный станок | 1921 |
|
SU375A1 |
