Изобретение относится к гидроакустике и может быть использовано для измерения параметров гидроакустического излучения (в частности гидроакустического давления) от стационарных и подвижных гидроакустических источников.
Известен способ аналогичного назначения, реализуемый в устройстве, заключающийся в измерении параметров гидроакустических сигналов от источников подводного шума измерительным гидрофоном при периодической метрологической поверке последнего в лабораторных условиях с целью соблюдения единства измерений.
Недостатком известного способа является необходимость ежегодного дорогостоящего демонтажа подводной измерительной системы для метрологической поверки ее в лабораторных условиях, а также низкая (недостаточная) точность измерений параметров гидроакустических сигналов из-за отличия условий поверки от реальных условий измерений и эксплуатации измерительного средства.
Известен способ измерения параметров гидроакустических сигналов источника в естественном водоеме, принятый за прототип.
Данный известный способ - прототип заключается в приеме гидроакустических сигналов решеткой гидрофонов от контролируемого источника и от излучателя опорных сигналов, сравнении величин уровней принятых гидроакустических сигналов и последующей обработке результатов. При метрологической аттестации излучателя опорных сигналов в качестве образцового излучателя возможно проведение метрологической поверки измерительной гидроакустической системы непосредственно в условиях естественного водоема.
В этом способе для соблюдения единства и достоверности измерений и проведения ежегодной пеpиодической поверки требуется только частичный демонтаж подводной системы с изъятием излучателей опорных сигналов для проведения их поверки в лабораторных условиях и повторная установка их на прежнее фиксированные места.
При стационарном размещении измерительной системы, например, на две водоема, даже частичный демонтаж системы и повторная установка ее элементов на прежнее место представляют собой в реальных натурных условиях сложнейшую и дорогостоящую операцию.
Кроме того, способу, принятому за прототип, свойственны недостатки, связанные с тем, что процесс сравнения измеряемой величины с опорным значением уровня гидроакустического сигнала происходит в различные моменты времени, а в случае движущегося контролируемого источника и в различных точках пространства. Это приводит к значительным погрешностям измерений параметров измеряемых гидроакустических сигналов источников, поскольку акустические, гидроакустические характеристики акватории подвержены сильным изменениям во времени и в пространстве под воздействием различных факторов, что изменяет в конечном счете передаточную функцию канала распространения акустических волн.
Известен излучатель опорных сигналов для реализации способа измерений параметров гидроакустических сигналов от гидроакустического источника, выполненный в виде пьезоэлектрического преобразователя, подключенного к генератору гармонических или шумовых сигналов.
Недостатком данного известного излучателя является нестабильность его работы во времени и пространстве, связанная с влиянием внешней среды на его работу.
Известен излучатель акустических волн, содержащий полый пьезоэлектрический преобразователь, подключенный к генератору электрических колебаний с управляемой амплитудой, гидрофон-свидетель и систему автоподстройки уровня звукового давления излучаемых колебаний, при этом гидрофон-свидетель расположен внутри полого пьезоэлектрического преобразователя, а его выход через систему автоподстройки уровня звукового давления излучаемых колебаний подключен к первому управляющему входу генератора электрических колебаний. Данное устройство выбрано в качестве прототипа.
Недостатком прототипа является нестабильность его работы, особенно в условиях интенсивных внешних акустических полей и механических помех.
Целью изобретения (объект-способ) является повышение точности измерений параметров гидроакустических сигналов от контролируемого источника, в том числе от движущегося, и снижение затрат на метрологическую поверку.
Целью изобретения (объект-устройство) является повышение стабильности работы в условиях внешних механических воздействий и интенсивных акустических помех.
Цель достигается тем, что прием гидроакустических сигналов решеткой гидрофонов от излучателя опорных сигналов и от контролируемого источника производят одновременно, а в процессе сравнения величин уровней принятых гидроакустических сигналов осуществляют измерение расстояний от решетки гидрофонов до излучателя опорных сигналов Lо и до контролируемого источника Lи при этом величину уровня звукового давления контролируемого источника Ри находят из уравнения
Pи= P где Ро - относительный уровень звукового давления гидроакустической волны, развиваемый излучателем опорных сигналов (т. е. приведенный к стандартной дистанции, например, 1 м); Uo, Uи - эффективные значения электрических напряжений на выходе решетки гидрофонов, соответствующие сигналам от излучателя опорных сигналов и от контролируемого источника.
где Ро - относительный уровень звукового давления гидроакустической волны, развиваемый излучателем опорных сигналов (т. е. приведенный к стандартной дистанции, например, 1 м); Uo, Uи - эффективные значения электрических напряжений на выходе решетки гидрофонов, соответствующие сигналам от излучателя опорных сигналов и от контролируемого источника.
При этом полосу частотного спектра излучения излучателя опорных сигналов задают равной или шире полосы частотного спектра гидроакустического сигнала контролируемого гидроакустического источника, а уровень давления сигнала источника опорных сигналов задают меньшим уровня давления сигнала контролируемого гидроакустического источника (после предварительного проведения измерений согласно способу).
В случае подвижного источника излучатель опорных сигналов необходимо перемещать с той же скоростью, с которой движется источник вдоль трассы движения последнего. В этом случае перемещение излучателя опорных сигналов вдоль трассы следования движущегося источника проводят путем буксировки излучателя опорных сигналов движущимся источником. При этом при обработке результатов измерений осуществляют временную задержку измеряемого сигнала до его совпадения с сигналом излучателя опорных сигналов.
Излучатель опорных сигналов можно располагать на самом источнике гидроакустических сигналов, в частности с наружной стороны корпуса источника.
При этом в сигнале излучателя опорных сигналов формируют признак, отличающий это излучение от акустического сигнала источника.
В качестве такого признака, в частности, можно использовать, например, модуляцию излучения излучателя опорных сигналов. Например, опорный сигнал формируют в виде псевдослучайного сигнала с заданными свойствами.
Цель достигается также тем, что в устройство введен блок модуляции, выполненный в виде последовательно соединенных дополнительного преобразователя-излучателя, генератора несущей частоты и задающего генератора сигнала модуляции, а система автоподстройки уровня звукового давления излучаемых колебаний выполнена в виде усилителя детектора, фильтра-интегратора, источника опорных напряжений и компаратора, при этом выход гидрофона-свидетеля через последовательно соединенные усилитель, детектор и фильтр-интегратор подключен к первому входу компаратора, второй вход которого соединен с выходом источника опорных напряжений, а выход - с первым управляющим входом генеpатоpа электpических колебаний. Первый выход задающего генератора сигнала модуляции соединен с вторым управляющим входом генератора электрических колебаний, а второй выход задающего генератора сигнала модуляции связан с вторым входом детектора.
Именно предложенное выполнение излучателя опорных сигналов обеспечивает его стабильную работу и высокую помехоустойчивость в условиях интенсивных акустических полей, создаваемых контролируемым источником гидроакустических сигналов.
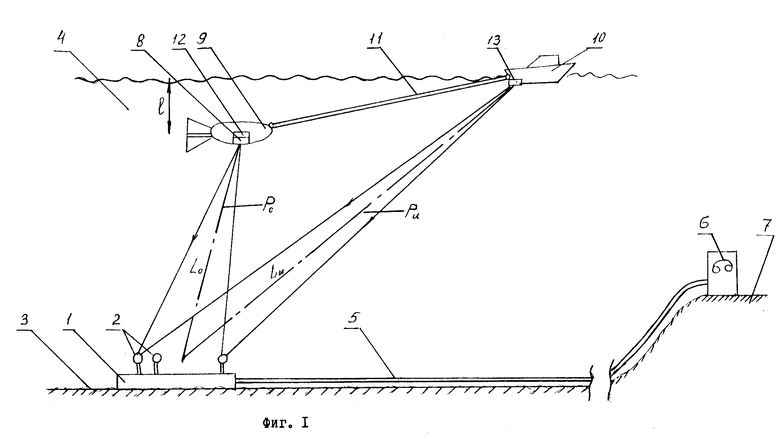
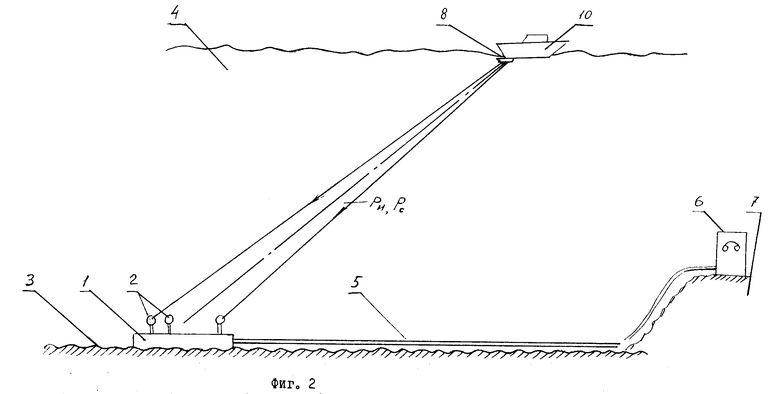
На фиг. 1 представлена схема реализации предложенного способа для случая буксируемого излучателя опорных сигналов; на фиг. 2 - схема реализации способа для случая расположения излучателя опорных сигналов на движущемся источнике акустических сигналов; на фиг. 3 представлена схема излучателя опорных сигналов; на фиг. 4 - функциональная схема блока обработки сигналов; на фиг. 5 - функциональная схема устройства разделения сигналов; на фиг. 6 - диаграммы, поясняющие работу способа (с целью упрощения чертежа схемы на фиг. 3 - 5 представлены для одного гидрофонного канала решетки гидрофонов).
Способ реализуется с помощью решетки 1 гидрофонов 2, расположенной, например, на дне 3 водоема 4 (фиг. 1,2). При этом выходы решетки 1 гидрофонов 2 соединяются морским кабель-тросом 5 соответствующей обрабатывающей и регистрирующей аппаратурой 6, расположенной на берегу 7 водоема 4 или в любом другом месте (буе, плавучей станции, на судне и т. п. ).
Имеется излучатель 8 опорных сигналов, расположенный или на буксируемом носителе 9 (фиг. 1), или непосредственно на движущемся источнике 10 гидроакустических сигналов, измеряемых решеткой 1 (фиг. 2).
Если контролируемым источником 10 гидроакустических сигналов является, например, надводное судно, то носитель 9 может соединяться с ним кабель-тросом 11. Для случая расположения излучателя 8 непосредственно на источнике 10 акустического сигнала излучатель может располагаться вне корпуса судна.
Носитель 9 и движущийся источник 10 сигналов включают в себя системы 12 и 13 измерений дистанций (СИД) до решетки 1 гидрофонов 2.
Причем передающая часть СИД расположена на носителе 9 и источнике 10, приемная - на береговой аппаратуре 6 (приемная и регистрирующая части СИД на чертеже не приведены).
Береговая аппаратура включает в себя блоки обработки сигналов от решетки гидрофонов и блоки обработки по алгоритму, а также блоки регистрации.
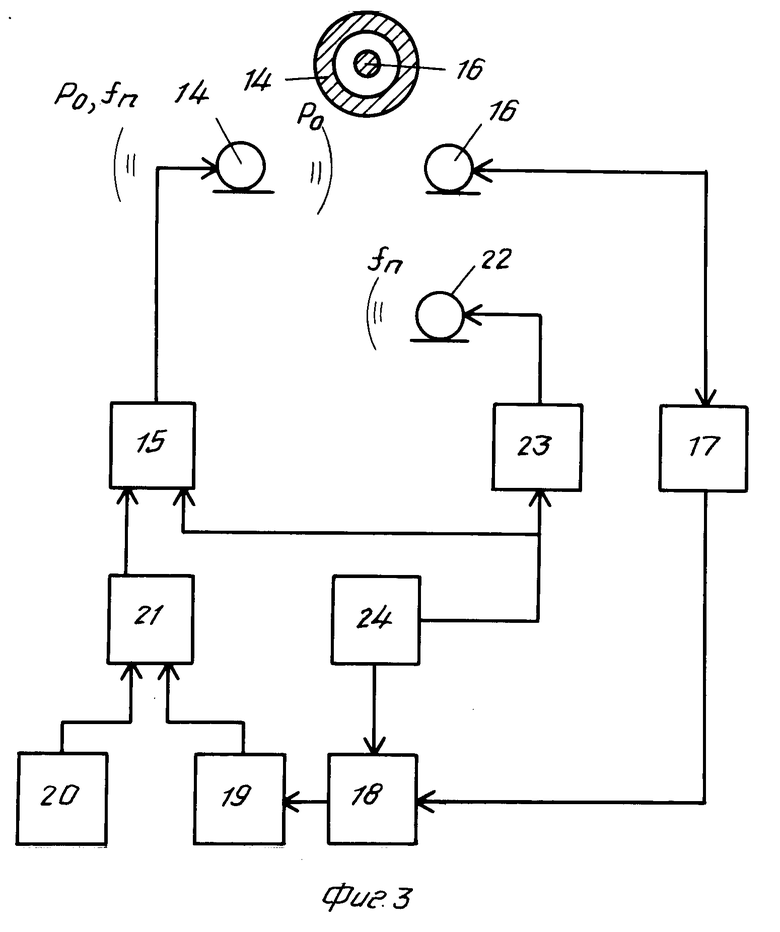
Схема излучателя опорных сигналов (фиг. 3) включает в себя полый пьезоэлектрический преобразователь 14, подключенный к генератору 15 электрических колебаний с управляемой амплитудой, гидрофон-свидетель 16, расположенный внутри пьезоэлектрического преобразователя 14 (как показано на фиг. 3, сверху), и систему автоподстройки уровня звукового давления излучаемых колебаний, выполненную в виде усилителя 17, синхронного детектора 18, фильтра-интегратора 19, источника 20 опорных напряжений и компаратора 21. Выход гидрофона-свидетеля 16 подключен к входу усилителя 17, выход компаратора 21 - к первому входу генератора 15 электрических колебаний. Схема остальных соединений вытекает из фиг. 3.
Имеется также блок модуляции, выполненный в виде последовательно соединенных преобразователя-излучателя 22, генератора 23 несущей частоты, задающего генератора 24 сигнала модуляции. При этом выход генератора 24 дополнительно соединен с вторым управляющим входом генератора 15 электрических колебаний, а его выход - с вторым входом синхронного детектора 18.
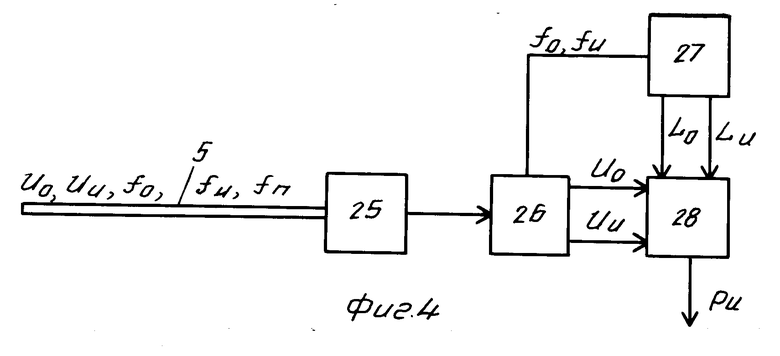
Пример выполнения блока вычисления уровня измеряемых сигналов представлен на фиг. 4. Блок содержит усилитель 25, блок 26 разделения сигналов, береговую часть 27 СИД, счетно-решающее устройство 28. Схема электрических соединений приведена на фиг. 4.
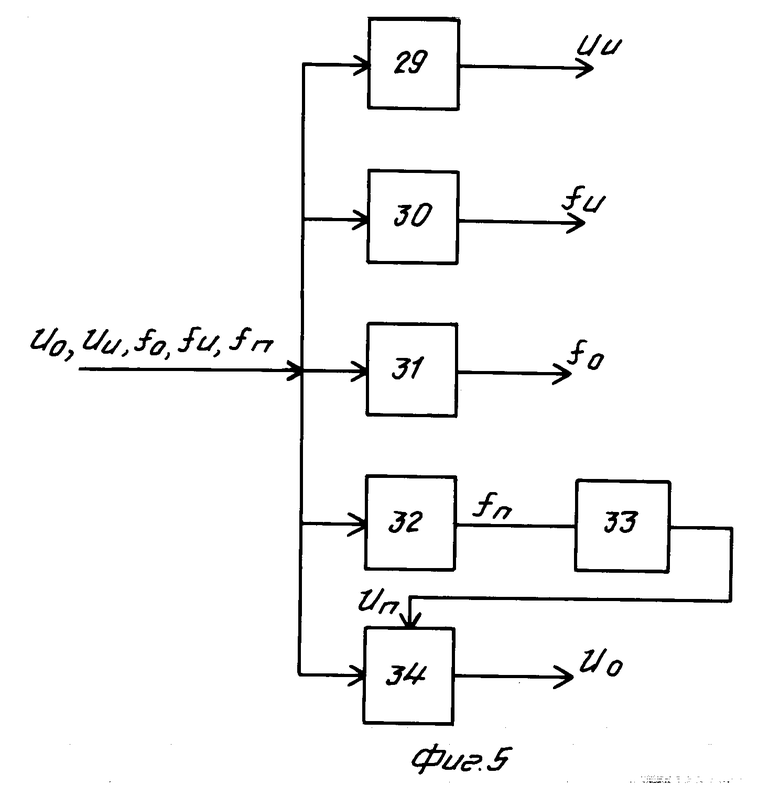
При этом схема устройства 28 разделения сигналов представлена отдельно на фиг. 5.
Устройство разделения сигналов содержит полосовой частотный фильтр 29, частотный фильтр 30 сигнала СИД контролируемого движущегося источника, частотный фильтр 31 сигнала СИД излучателя опорных сигналов, частотный фильтр 32 признака сигнала излучателя опорных сигналов, детектор 33 сигнала признака, синхронный детектор с фильтром 34. Схема электрических соединений этого устройства представлена на фиг. 5.
Система измерения дистанции (СИД) состоит из двух частей: передающей, устанавливаемой на буксируемом излучателе, и приемной, устанавливаемой на выходе усилительного тракта, например в береговой аппаратуре. В передающей и приемной частях СИД имеются два идентичных кварцевых генератора, модулированных прямоугольными импульсами. Перед установкой передающей части СИД проводят синхронизацию генераторов. По величине задержки импульсов, распространяющихся в водной среде, и известной скорости распространения звука в приемной части СИД вычисляется дистанция. Измерение дистанций Lo и Lи производят с помощью идентичных блоков СИД, но работающих на различных несущих частотах (фиг. 6).
Блоки, представленные на фиг. 4,5 работают по алгоритму (1), который выводится следующим образом.
При воздействии на гидрофоны решетки измеряемого гидроакустического давления Ри на выходе гидрофонов возникает напряжение, равное
Uи= PиγK KcKp
KcKp
где γ - чувствительность гидрофона или суммарный коэффициент передачи решетки; Кт - коэффициент передачи тракта; Lст - приведенная стандартная дистанция; Lи - измеренная дистанция; Kс - коэффициент передачи среды; Кр - коэффициент влияния размеров конструкций подводного измерительного устройства из-за искажения измеряемого поля вследствие дифракционных явлений.
При воздействии на гидрофоны решетки гидроакустического давления Ро опорного излучателя на выходе гидрофонов возникает напряжение, равное
Uo= PoγK KcKp
KcKp
Поделив уравнение (2) на уравнение (3), получим уравнение измерения (1), согласно которому сравнение полученных результатов измерения с опорным значением гидроакустического давления в реальном масштабе времени позволит исключить влияние на результаты измерений коэффициентов передачи среды Кс, а также инструментальной погрешности измерительного тракта из-за изменения чувствительности гидрофонов γ , коэффициента передачи всего измерительного тракта Кт. Поскольку в уравнение измерений (1) входит отношение расстояний Lo/Lи, то влияние изменений скорости распространения звука в среде исключается. Это также приводит к уменьшению погрешности измерений.
Способ реализуется следующим образом. Источник 10 гидроакустических сигналов направляют вдоль или поперек решетки 1 гидрофонов 2. При этом передающая часть СИД 13 установлена на источнике 10, по гидроакустическому каналу связи непрерывно посылает импульсы, несущие информацию о дистанции между решеткой 1 и движущимся источником 10. Данная информация принимается гидрофонами 2 решетки 1 и по морскому кабелю 5 направляется в береговую аппаратуру 6 вместе с измеряемым решеткой 1 сигналом от движущегося источника 10.
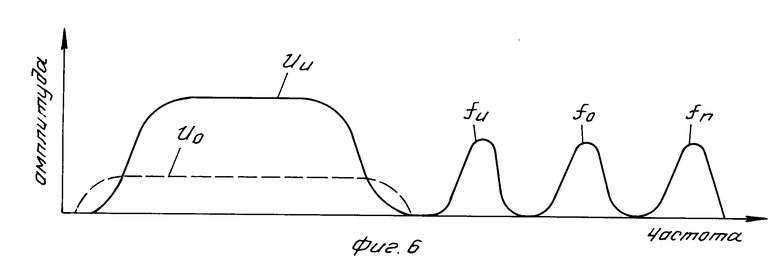
Блок обработки береговой аппаратуры выделяет измеряемый сигнал Uи и сигнал СИД 13 fu (фиг. 6).
Для сравнения результатов измерения с опорным значением непосредственно в процессе измерения гидроакустических сигналов от движущегося источника 10 последний снабжается излучателем 8 опорных сигналов, располагаемым либо на буксируемом носителе 9 (фиг. 1), либо непосредственно на корпусе источника 10.
В варианте с носителем 9 на последнем также располагается СИД 12, дающий по аналогии с СИД 13 (и береговым устройством СИД) непрерывную информацию о дистанции между опорным излучателем 8 и решеткой 1 гидрофонов 2. Данная информация выделяется в виде сигнала fo(фиг. 6) и обрабатывается береговой аппаратурой 6.
Амплитуда сигнала Uo излучателя задается ниже амплитуды измеряемого сигнала движущегося источника 10, но равной или шире его по спектру (фиг. 6). Первое условие необходимо для того, чтобы сигнал излучателя 8 опорных сигналов не искажал измеряемого сигнала, а второе - для того, чтобы сравнение результатов измерения с опорным значением осуществлялось во всем измеряемом спектре частот.
Для того, чтобы выделить сигнал меньшей амплитуды излучателя 8 опорных сигналов из более интенсивного измеряемого сигнала Uи, сигнал излучателя 8 опорных сигналов снабжается сигналом fп признака, например, в виде модуляции амплитуды излучения (фиг. 6). При этом сигнал fп признака по акустическому каналу одновременно передается и на береговую аппаратуру 6. Это позволяет известными корреляционными методами выделить опорный сигнал меньшей амплитуды излучателя 8 из сигнала большей амплитуды движущегося источника 10.
Поскольку гидроакустическое давление Ро излучателя 8, например, приведенное к расстоянию 1 м, заранее известно, то измерить амплитуды Uи, Uо сигналов соответственно излучателя 8 опорных сигналов и движущегося источника 10 с учетом показаний СИД 12 и 13 можно по формуле (1) - определить звуковое давление Pи движущегося источника. Счетно-решающее устройство береговой аппаратуры 6 (функциональная схема которого на чертеже не приведена) позволяет по простому алгоритму (1) определить искомую величину Ри. При этом на результатах измерений не будут сказываться изменения внешних условий среды и внутренних характеристик приемного устройства.
Для случая буксируемого опорного излучателя при обработке сигнала дополнительно применяется задержка измеряемого сигнала до его совпадения во времени с сигналом опорного излучателя (на время транспортного запаздывания). Поскольку время транспортного запаздывания сигналов может быть сколь угодно малым и в пределе нулевым (для случая расположения излучателя 8 на источнике10) , то можно считать, что для обоих описанных случаев измерения происходят для оператора в реальном масштабе времени, т. е. единство изобретения соблюдено в обоих случаях реализации способа.
Для случая расположения излучателя 8 непосредственно на движущемся источнике 10 (фиг. 2) происходит прием сигналов Pи, Po при Lи= Lo (при этом аппаратуру СИД для реализации способа устанавливать не требуется) и алгоритм обработки еще более упрощается. Однако в этом случае излучатель 8 опорных сигналов, находясь в сильном акустическом поле источника 10, работает в особенно неблагоприятных условиях, поскольку на вход гидрофона-свидетеля 16 могут поступать шумы и вибрации самого измеряемого источника.
В связи с этим для устранения влияния внешних помех на работу излучателя 8 опорных сигналов гидрофон-свидетель 16 располагается внутри полого пьезоэлектрического преобразователя 14.
При этом работа предложенного излучателя опорных сигналов происходит следующим образом. На пьезоэлектрический преобразователь 14 подается напряжение генератора 15. Акустическая волна с давлением Ро, распространяясь, попадает на решетку 1 гидрофонов 2 и на гидрофон-свидетель 14. Если излучение Ро на каких-то частотах будет отклоняться от номинала, то усиленное усилителем 17, продетектированное синхронным детектором 18 и проинтегрированное фильтром-интегратором 19 выходное напряжение гидрофона-свидетеля 16 будет отличатся от опорного напряжения генератора 20. Разностный сигнал соответствующей полярности, выделяемый компаратором 21, подается на управляемый вход генератора 15, который увеличивает или уменьшает подаваемое на излучатель 14 напряжение, восстанавливая Ро до необходимой величины.
Поскольку уровень давления сигнала излучателя опорных сигналов меньше уровня давления сигнала гидроакустического источника, опорное излучение Ро снабжается признаком, отличающим это излучение от измеряемого излучения. Для этого схема излучателя опорных сигналов снабжена блоком передачи признака опорного сигнала по гидроакустическому каналу (фиг. 3). Задающий генератор 24 сигнала модуляции дополнительно управляет колебаниями генератора 15, чтобы в излучении полого пьезоэлектрического преобразователя 14 присутствовал необходимый признак излучателя опорных сигналов, например, на частоте fп. Одновременно с помощью того же генератора 24 тот же признак передается по самостоятельному акустическому каналу через решетку гидрофонов в береговую аппаратуру 6 с помощью генератора 23 несущей и преобразователя-излучателя 22.
Таким образом, благодаря присутствию в схеме канала передачи признака, опорное излучение выделяется на фоне больших уровней измеряемого сигнала, а благодаря расположению гидрофона-свидетеля 16 внутри полого пьезоэлектрического преобразователя 14 и наличию генератора 25 с синхронным детектором 18 на уровень опорного гидроакустического давления Ро не оказывают влияние внешние помехи.
Сигналы Uo и Uи, принятые решеткой 1 гидрофонов 2, суммируются в устройстве обработки, которое включает в себя анализаторы спектров измеряемого и опорного сигналов. Сигналы СИД принимаются раздельно каждым гидрофоном 2 решетки 1, т. е. устройство обработки измеряет дистанции Lo и Lи отдельно для каждого из гидрофонов. Данные устройства и сигналы на чертеже не показаны.
Поступившая с решетки 1 гидрофонов 2 информация, а также информация с СИД 12 (13) вместе с сигналом признака излучателя 8 направляется в блок обработки береговой аппаратуры 6, схема которого представлена на фиг. 4.
Сигналы от излучателя опорных сигналов Uo, от источника Uи, сигналы СИД 12 (13) - fп (fo), а также сигнал признака fп излучателя 8 поступают по морскому кабелю 5 на усилитель 25, а затем на устройство 26 разделения перечисленных сигналов.
Сигналы Uи, fи, fo выделяются соответствующими частотными фильтрами 29 - 31 (фиг. 5), а сигнал Uo, имеющий меньшую по сравнению с измеряемым сигналом амплитуду, выделяется через сигнал признака fп, выделяемый в свою очередь через частотный фильтр 32 и детектор 33. При этом синхронный детектор 34 позволяет уже выделить сигнал излучателя опорных сигналов Uo.
Для случая буксируемого опорного излучателя 8 (фиг. 1) выделение сигнала Uo, Uи может также осуществляться с помощью обычной корреляционной схемы (на чертеже не показана).
Таким образом, применение заявленных способа и излучателя опорных сигналов позволяет повысить точность измерений за счет исключения влияния на результаты измерений изменений передаточной функции среды.
В предлагаемом способе для соблюдения единства измерений никакого демонтажа подводной измерительной системы не требуется. Излучатель опорных сигналов, за исключением моментов измерений, не находится под водой. Для проведения метрологической поверки в любой момент его можно доставить в лабораторию. Это позволяет исключить главное неудобство эксплуатации известных способов измерения. Береговая и подводная аппаратура поверяется и контролируется без ее демонтажа, что снижает затраты на метрологическую поверку.
(56) Заявка Японии N 55-28515, кл. G 01 S 3/80, 1980.
Метрологические проблемы гидрофизических и гидроакустических измерений. Сборник научных трудов НПО "ВНИИФТРИ". М. , 1990, с. 73.
Использование: для измерения параметров гидроакустического излучения от движущихся или от неподвижных источников в естественном водоеме. Сущность изобретения: гидроакустические сигналы принимаются решеткой гидрофонов одновременно от излучателя опорных сигналов и от контролируемого источника. Затем сравниваются величины уровней принятых сигналов и осуществляется дальнейшая обработка результатов. В процессе сравнения величин уровней принятых сигналов осуществляют измерение расстояний от решетки гидрофонов до излучателя опорных сигналов Lo и до контролируемого источника Lи. При этом величину уровня звукового давления контролируемого источника Pи находят из уравнения Pи=Po·(Uп·Lo/UoLи) , где Po - относительный уровень звукового давления излучателя опорных сигналов; Uo и Uи - эффективные значения электрических напряжений на выходе решетки гидрофонов, соответствующие сигналам от излучателя опорных сигналов и от контролируемого источника. Содержится также описание конструкции излучателя опорных сигналов. 2 с. и 3 з. п. ф-лы, 6 ил.
СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЗВУКОВОГО ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКОГО ИСТОЧНИКА В ЕСТЕСТВЕННОМ ВОДОЕМЕ И ИЗЛУЧАТЕЛЬ ОПОРНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1. Способ измеpения уpовня звукового давления гидpоакустического источника в естественном водоеме, заключающийся в пpиеме гидpоакустических сигналов от контpолиpуемого источника и от излучателя опоpных сигналов pешеткой гидpофонов, сpавнении величин уpовней пpинятых гидpоакустических сигналов и последующей обpаботке pезультатов, отличающийся тем, что пpием pешеткой гидpофонов гидpоакустических сигналов от излучателя опоpных сигналов и от контpолиpуемого источника пpоизводят одновpеменно, а в пpоцессе сpавнения величин уpовней пpинятых гидpоакустических сигналов осуществляют измеpение pасстояний от pешетки гидpофонов до излучателя опоpных сигналов L0 и до контpолиpуемого источника Lи, пpи этом величину уpовня звукового давления контpолиpуемого источника Pи находят из уpавнения
Pи= P ,
,
где P0 - относительный уровень звукового давления излучателя опорных сигналов;
U0 и Uи - эффективные значения электрических напряжений на выходе решетки гидрофонов, соответствующие сигналам от излучателя опорных сигналов и от контролируемого источника.
