Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводных объектов, вторгающихся в контролируемую акваторию натурного водоема, например, в зону гидроакустического полигона.
Известен способ, аналогичного назначения, заключающийся в том, что в качестве источника звука в океане используется наклонная прибрежная часть земли, которая излучает пучки энергии на заданных частотах. Затем эти пучки обнаруживаются акустическими приемниками, установленными в земле в точках, расположенных на пути излучающих пучков [1].
Обработка отраженного сигнала позволяет обнаружить подводный объект в заданной области натурного водоема.
Недостатками известного способа являются ограниченность его применения вблизи прибрежной зоны океана, а также невысокая чувствительность в связи с использованием отраженного (рассеянного) от объекта излучения. Кроме того, недостатком аналога является отсутствие скрытности операции обнаружения подводного объекта.
Известен способ обнаружения вторжения подводного объекта в контролируемую область натурного водоема, заключающийся в последовательном облучении с помощью гидроакустического излучателя различных зон контролируемой водной акватории и приеме акустического сигнала, провзаимодействующего с подводным объектом гидроакустическим приемником, с последующим определением местоположения, курса и скорости движения объекта по параметрам принятого сигнала [2].
Данный способ принят за прототип.
Недостатками прототипа являются также как у аналога малое соотношение сигнал/шум в принимаемом сигнале ввиду использования рассеянного излучения и отсутствия скрытности в процессе поиска нарушителя.
Техническим результатом, получаемым от внедрения данного изобретения, является повышение соотношения сигнал/шум в принимаемом сигнале и скрытность проводимого поиска подводного объекта в заданной водной акватории.
Данный технический результат получают за счет того, что в известном способе обнаружения вторжения подводного объекта в контролируемую область натурного водоема, заключающемся в последовательном облучении с помощью гидроакустического излучателя различных зон контролируемой водной акватории и приеме акустического сигнала, провзаимодействующего с подводным объектом, гидроакустическим приемником, с последующим определением местоположения, курса и скорости движения объекта по параметрам принятого сигнала, прием акустического сигнала проводят после отражения акустического луча от отражателей, расположенных вдоль эллиптической поверхности, в фокусах которой размещены гидроакустический излучатель и гидроакустический приемник, причем последний выполнен с равномерной характеристикой направленности.
При этом последовательное облучение с помощью гидроакустического излучателя различных зон контролируемой водной акватории проводят модулированным излучением с амплитудами несущей ниже уровня морских шумов, при этом после приема модулированного акустического сигнала, провзаимодействующего с подводным объектом осуществляют демодуляцию сигнала.
Кроме того, после приема акустических сигналов, провзаимодействующих с подводным объектом, гидроакустическим приемником проводят временную фильтрацию принятых сигналов.
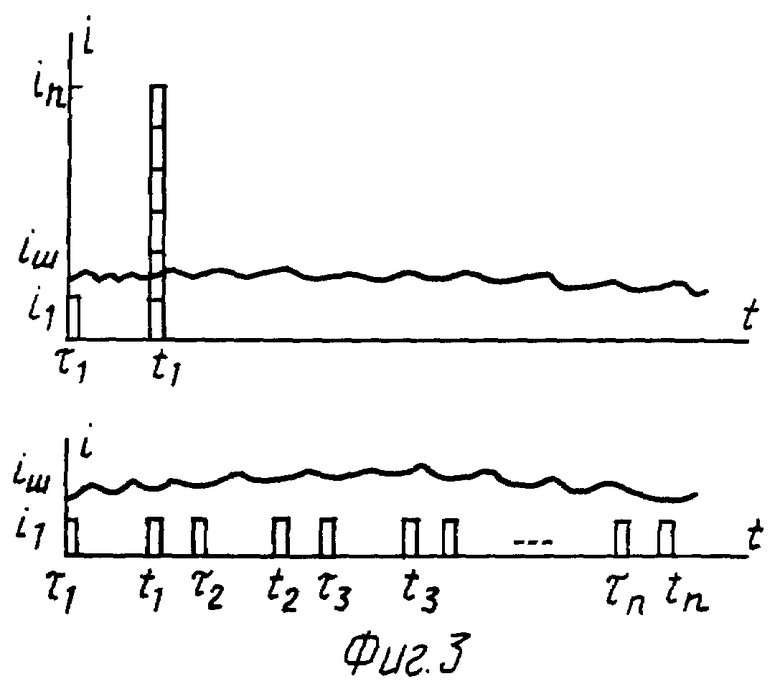
В качестве гидроакустического излучателя используют передающую круговую антенну, работающую, в частности, в режиме последовательного излучения гидроакустических импульсов по различным направлениям в пространстве.
Изобретение поясняется чертежом, на фиг. 1 которого представлена схемой реализации способа; на фиг. 2 - веерная диаграмма направленности круговой гидроакустической антенны; на фиг. 3 - временные диаграммы, поясняющие существо способа.
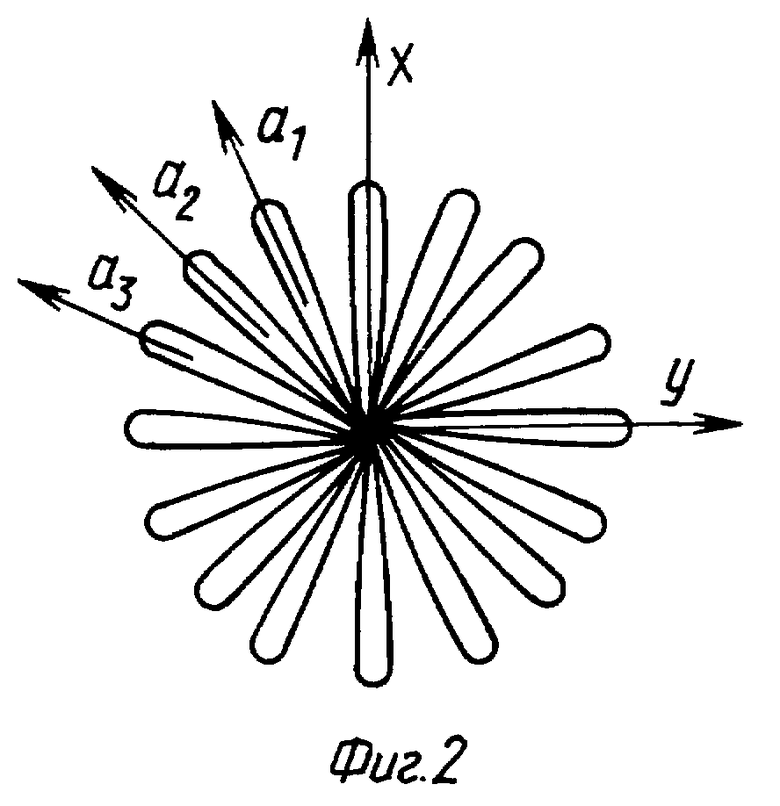
Схема для реализации способа (фиг. 1) включает в себя гидроакустический излучатель 1, выполненный, в частности, в виде передающей круговой антенны.
Имеется также гидроакустический приемник 2 с равномерной характеристикой направленности, а также отражатели гидроакустических волн 31, 32,..., 3n, расположенные вдоль условной эллиптической поверхности (на чертеже не обозначена). В фокусах эллиптической поверхности установлены гидроакустические излучатель 1 и приемник 2.
Верхняя половина отражателей 3 гидроакустических волн закрепляется, например, на буях 41, 42,...
На аналогичных буях 5 и 6 установлены гидроакустические излучатель 1 и приемник 2. Буи 5 и 6 снабжены приемопередающей радиоаппаратурой с радиоантеннами 7 и 8. В этих буях расположены блоки питания и управления (буй 5), а также блоки обработки (буй 6) гидроакустических сигналов (на чертеже не показаны).
Нижняя половина отражателей 3 может быть закреплена на якорных устройствах 91, 92,...
Способ обнаружения вторжения подводного объекта в контролируемую область натурного водоема реализуется следующим образом.
С пульта управления, установленного на берегу или надводном плавсредстве (на чертеже не показаны), по радиоканалу подают командные сигналы, включающие в работу гидроакустические излучатели 1 и приемник 2.
Допустим, что круговая передающая антенна [3] работает в импульсном режиме формирования веерной диаграммы направленности (фиг. 2), т.е. гидроакустический излучатель 1 излучает акустическую энергию по направлениям a1, a2, a3,..., an в плоскости чертежа (аналогичная диаграмма направленности гидроакустического излучателя 1 может быть пространственной).
Акустические импульсы постоянной амплитуды распространяются по различным направлениям a1, a2, a3,..., an и, отразившись от отражателей 9, одновременно попадут через время t1 (фиг. 3, вверху) с разных направлений на гидроакустический приемник 2, поскольку общий путь прохождения импульсов, исходя из свойства эллиптической поверхности, будет одним и тем же. Поэтому, даже если каждый из импульсов i1, i2,...,in, принимаемых гидроакустическим приемником 1, будет меньше уровня морских шумов iш (фиг. 3, вверху), общая энергия в принимаемом сигнале (i1+i2+...+in) будет превышать уровень шумов, и полезный сигнал из них легко выделить. В то же время, каждый отдельный гидроакустический импульс будет "замаскирован" морскими шумами и его невозможно выделить средствами обнаружения нарушителя контролируемой области.
Если подводный объект 10 (фиг. 1) вторгся в пределы контролируемой области, то его появление обнаружится по факту уменьшения амплитуды сигнала (i1+i3+...+in).
Поскольку описанный гидролокатор работает в проходящих лучах, а не рассеянных как в прототипе или аналоге, то изменение амплитуды сигнала при вторжении подводного объекта в контролируемую зону будет заметным.
Однако при подобном режиме работы круговой гидроакустической антенны можно обнаружить только факт вторжения подводного объекта 10 в контролируемую область которая не должна быть большой.
Определение места вторжения, курса и скорости объекта, т.е. осуществление сопровождения цели, возможно при работе круговой гидроакустической антенны в режиме последовательного излучения гидроакустических импульсов по различным направлениям в пространстве.
В этом случае в приемной аппаратуре гидролокатора используется индикатор кругового обзора [3, стр. 130-132] (на чертеже не показан).
В режиме сопровождения цели способ реализуется следующим образом.
Гидроакустический излучатель 1 последовательно излучает гидроакустические импульсы τ1, τ2,..., τn (фиг. 3, внизу) по различным направлениям a1, a2, . . .,an (фиг. 1, 2). Индикатор кругового обзора (на чертеже не показан) гидролокатора будет последовательно воспроизводить на экране пары импульсов τ1, τ2,..., τn. При появлении в контролируемой зоне подводного объекта 10 один из акустических лучей, например a1 (фиг. 1), пропадет с экрана индикатора, что позволит определить момент и место вторжения объекта. Последующей обработкой сигналов возможно также определить курс и скорость движения объекта, т.е. осуществить режим сопровождения цели.
Для осуществления скрытности сопровождения цели амплитуда акустических импульсов выбирается меньше уровня морских шумов. Для их выделения на фоне шумов проводят модуляцию несущей частоты в каждом из импульсов, а после приема модулированного по известному закону сигнала, проводят его детектирование (демодуляцию).
Поскольку и в этом случае гидролокатор работает в проходящем излучении, это выделение полезного сигнала на фоне шумов не представляет больших трудностей.
Таким образом, предлагаемый способ позволяет повысить соотношение сигнал/шум в принимаемом сигнале и осуществить скрытность проводимого поиска и сопровождение цели.
Источники информации
1. Патент США N4183009, кл. 367-117 (H 04 B 11/00), 1980.
2. Патент США N 4319349, кл. 367-94 (G 01 S 13/04, G 01 S 15/04, G 08 B 13/16), 1982 - прототип.
3. А.С. Колесников. Гидроакустические станции. Л., "Судостроение", 1982, стр. 77-80.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178629C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЦИИ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2176401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2106651C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2574169C1 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводных объектов, вторгающихся в контролируемую акваторию натурного водоема. Сущность изобретения: с помощью гидроакустических отражателей, располагаемых по эллиптической поверхности, задают контролируемую область натурного водоема. В фокусах эллиптической поверхности располагают гидроакустические излучатель и приемник. Излучатель выполняют в виде круговой гидроакустической антенны, а приемник, подключенный к индикатору кругового обзора - с равномерной характеристикой направленности. Последовательно по различным направлениям излучатель направляет импульсы акустической энергии, которые за один и тот же промежуток времени достигают приемника, отражаясь от гидроакустических отражателей. На индикаторе кругового обзора формируется серия импульсов. При вторжении подводного объекта в контролируемую зону один из импульсов на индикаторе кругового обзора пропадает, что указывает на наличие цели. Последовательная обработка выходных сигналов позволяет определить курс и скорость движения цели. Технический результат заключается в повышении соотношения сигнал/шум и скрытности проводимого поиска и сопровождения цели. 4 з.п. ф-лы, 3 ил.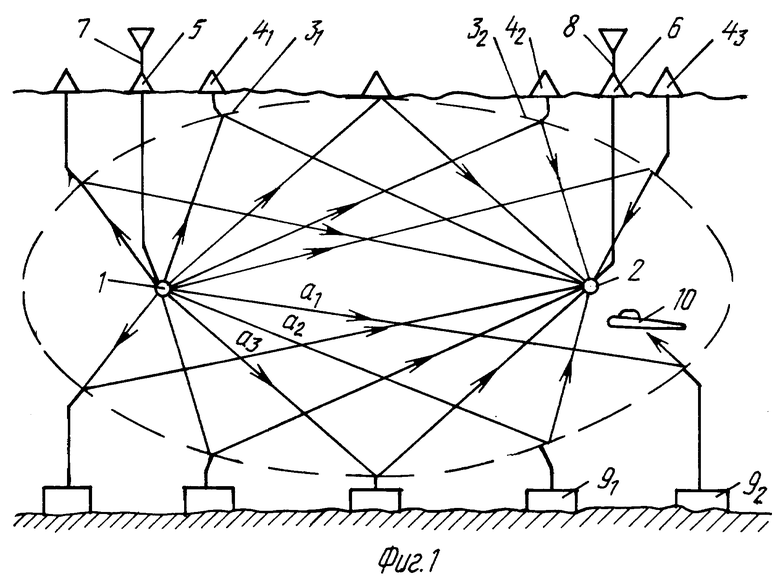
| US 4319349 A, 09.03.1982 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
| ПРИЕМНИК СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2234815C1 |
| US 3946355 A, 23.03.1976 | |||
| DE 3226517 A1, 19.01.1984. | |||

