Изобретение относится к технике телевидения и может быть использовано для измерения координат малоразмерных объектов или объектов с симметричным изображением в системах слежения.
Цель изобретения - повышение точности измерения координат путем уменьшения статической ошибки слежения.
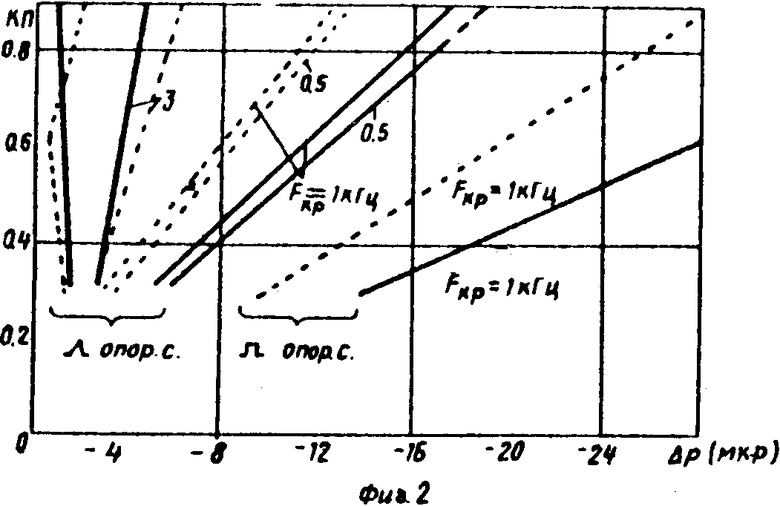
На фиг. 1 представлена структурная электрическая схема телевизионного координатора; на фиг. 2 - зависимость статической ошибки слежения Δ р при различных частотах крестообразной развертки Fкр от коэффициента передачи (КП) следящего контура телевизионного координатора; на фиг. 3 - временные диаграммы, поясняющие работу телевизионного координатора.
Телевизионный координатор содержит фотоэлектронный преобразователь (ФЭП) 1, видеоусилитель 2, квантователь 3, генератор 4 тактовых импульсов, счетчик 5 адреса, формирователь 6 опорного сигнала, дешифратор 7, блок 8 управления, триггер 9 реверса, блок 10 умножения и каналы 11 Х, 12 Y, каждый из которых содержит цифровой интегратор 13, формирователь 14 сигнала локальной развертки, блок 15 умножения, элемент И 16, первый 17 и второй 18 цифроаналоговые преобразователи (ЦАП).
Координатор работает следующим образом.
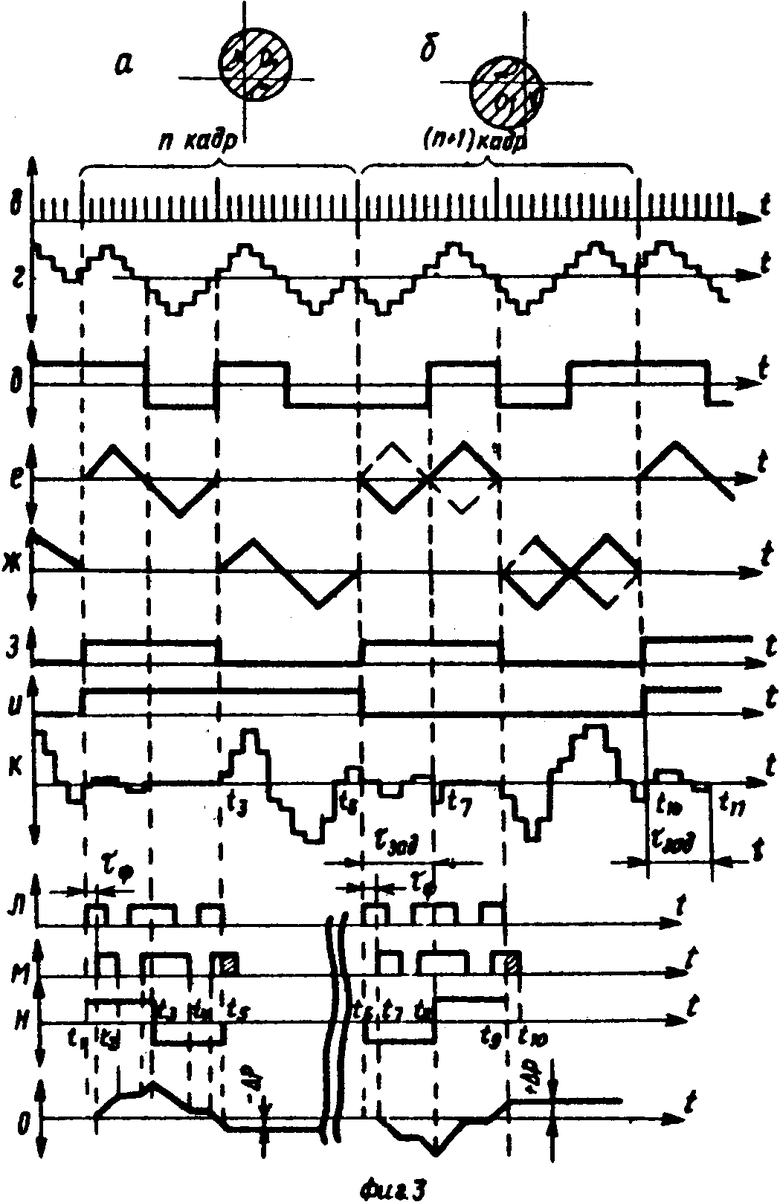
Телевизионный координатор в режиме слежения решает задачу измерения координат центра тяжести изображения объекта при крестообразной локальной развертке (см. фиг. 3, а) проекции объекта в плоскости фотоприемника. Использование понятия измерения координат центра тяжести изображения объекта обосновано тем, что при большом отношении сигнал/шум для рассматриваемых изображений объектов координаты геометрического центра и центра тяжести практически совпадают. Блоки, обеспечивающие режим поиска объекта и фиксацию обнаружения по априорно заданным сведениям, на фиг. 1 не указаны. Траектория сканирования задается выходными сигналами формирователей 14 каналов 11 Х, 12 Y, которые, будучи преобразованными вторым ЦАП 18 в аналоговую форму, поступают в отклоняющие катушки ФЭП 1. Постоянная скорость развертывающей апертуры (см. фиг. 3, е, ж) обеспечивается уровнем выходного сигнала формирователя 14, реализованного, например, на программируемых элементах памяти. Считывание внесенного в ячейки памяти формирователя 14 уровня сигнала (задающего траекторию локальной развертки) обеспечивается текущим адресом на выходе счетчика 5.
Такая реализация обеспечивает жесткую временную привязку, вследствие чего появляется возможность исключить влияние инерционности отклоняющей системы на заданные параметры траектории развертки путем предыскажения сигнала локальной развертки. Такая необходимость возникает в тех случаях, когда период локальной развертки оказывается соизмеримым с постоянной времени отклоняющей системы. Цикличность развертки обеспечивается соответствием емкости счетчика 5 адреса числу Z, задающего длительность полукадра локальной развертки и величину дискретизации по времени. В этом случае тактовая частота на выходе генератора 4 (см. фиг. 3, в) F1 = 2Fкр˙Z. Дешифратор 7 выделяет Z-е импульсы, которые поступают на вход блока 8. Нормированные сигналы (0; 1) блока 8 (см. фиг. 3, д), поступающие на вход формирователя 14 сигналов локальной развертки, используются для запрета считывания (см. фиг. 3, е, ж) в тех случаях, когда можно пренебречь инерционностью отклоняющей системы (временное положение и форма выходного сигнала формирователя 14 с допустимой точностью соответствуют заданным параметрам траектории развертки). В случае необходимости формирования предыскаженного сигнала, временное положение которого не укладывается в интервал полукадра (см. фиг. 3, ж), этот сигнал используется для формирования адресов, порядковый номер которых превышает Z.
Синхронно с траекторией развертки на выходе формирователя 6 вырабатывается опорный сигнал (пилообразный или прямоугольный). Синхронность обеспечивается реализацией формирователя 6 на элементах постоянной памяти и привязкой к выходному сигналу счетчика 5 адреса.
Таким образом, при крестообразной локальной развертке изображения на выходе ФЭП 1 формируется видеосигнал, переменная составляющая которого выделяется видеоусилителем 2 и нормируется по амплитуде на выходе квантователя 3. При наличии сигнала разрешения на выходе квантователя 3 (см. фиг. 3, м) на вход цифрового интегратора 13 проходит опорный сигнал (см. фиг. 3, н), квантованный по времени тактовыми импульсами генератора 4. В зависимости от временного положения нормированного видеосигнала относительно опорного (см. фиг. 3, м, н) на выходе цифрового интегратора 13 формируется сигнал (см. фиг. 3, п), задающий координатное положение геометрического центра локальной развертки. Цифровой интегратор 13, сигнал с выхода которого поступает на вход первого ЦАП 17, реализуется последовательно соединенными сумматором, первый вход которого является информационным входом интегратора 13, и регистром, выход которого является выходом блока и одновременно связан с вторым входом сумматора. Тактовые импульсы с выхода элемента И 16 поступают на вход цифрового интегратора 13.
Симметрирование следящего контура обеспечивается подкадровым реверсированием направления локальной развертки (см. фиг. 3, а, б, е, ж). Синхронно с разверткой инвертируется и опорный сигнал (см. фиг. 3, г, д, н). Реверс обеспечивается блоками 15 в каналах 11, 12, на выходах которых в зависимости от текущего состояния триггера 9 реверса (см. фиг. 3, и) производится логическое умножение сигналов развертки на ± 1.
Инвертирование опорного сигнала с выхода формирователя 6 обеспечивается блоком 10 умножения. Эпюра напряжений на фиг. 3, л на временных интервалах t1-t4 и t6-t9 отражает общую исходную позицию, когда центр тяжести изображения объекта и геометрический центр локальной развертки совпадают. При покадровом реверсировании траектории развертки на выходах цифровых интеграторов 13 каналов 11, 12 фиксируется разнополярная ошибка рассогласования ± Δ р (временные интервалы t1-t5 и t6-t10). Таким образом, при неподвижном изображении объекта геометрический центр локальной развертки совершает симметричные диагональные колебания относительно координат центра тяжести изображения объекта (см. фиг. 3, а, б). Изменение коэффициента передачи следящего контура, частоты локальной развертки и соотношения диаметра развертывающей апертуры и диаметра изображения объекта будет сказываться только на амплитуде этих колебаний.
Приведенный на фиг. 3, к случай показывает временное положение t3-t7 предыскаженного сигнала, которое не укладывается в фиксированный интервал t3-t5. Это связано с тем, что возникает необходимость противофазного демпфирования возникающих колебаний в инерционном контуре. Чтобы не нарушать временную структуру предыскаженного сигнала при реверсе направления развертки, в канал 12 Y сигнал реверса подается сдвинутым на половину кадра. Последнее обеспечивается задержкой, включаемой между выходом триггера 9 реверса и соответствующим входом блока 15 канала 12 Y. (56) Авторское свидетельство СССР N 719467, кл. H 04 N 7/18, 1980.
Авторское свидетельство СССР N 364001, кл. G 06 K 9/36, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1989 |
|
SU1635881A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1986 |
|
SU1443763A1 |
Изобретение относится к технике ТВ. Цель изобретения - повышение точности измерения координат путем уменьшения статической ошибки слежения. Устройство содержит фотоэлектронный преобразователь 1, видеоусилитель 2, квантователь 3, генератор 4 тактовых импульсов, счетчик 5 адреса, формирователь 6 опорного сигнала, дешифратор 7, блок 8 управления, каналы 11 X и 12 Y, каждый из которых содержит цифровой интегратор 13, формирователь (Ф) 14 сигнала локальной развертки, блок 15 умножения, элемент 16, ЦАП 17 и 18. Введены триггер 9 реверса, блок 10 умножения. Устройство в режиме слежения решает задачу измерения координат центра тяжести изображения объекта при крестообразной локальной развертке проекции объекта в плоскости фотоприемника. Траектория сканирования задается выходными сигналами Ф 14, которые, преобразованные ЦАП 18, поступают в отклоняющие катушки преобразователя 1. Постоянная скорость развертывающей апертуры обеспечивается уровнем выходного сигнала Ф 14, реализованного, например, на программируемых элементах памяти. Считывание уровня сигнала (задающего траекторию локальной развертки) обеспечивается текущим адресом на выходе счетчика 5. Такая реализация обеспечивает жесткую временную привязку, вследствие чего возможно исключить влияние инерционности отклоняющей системы на заданные параметры траектории развертки путем предыскажения сигнала локальной развертки. 3 ил.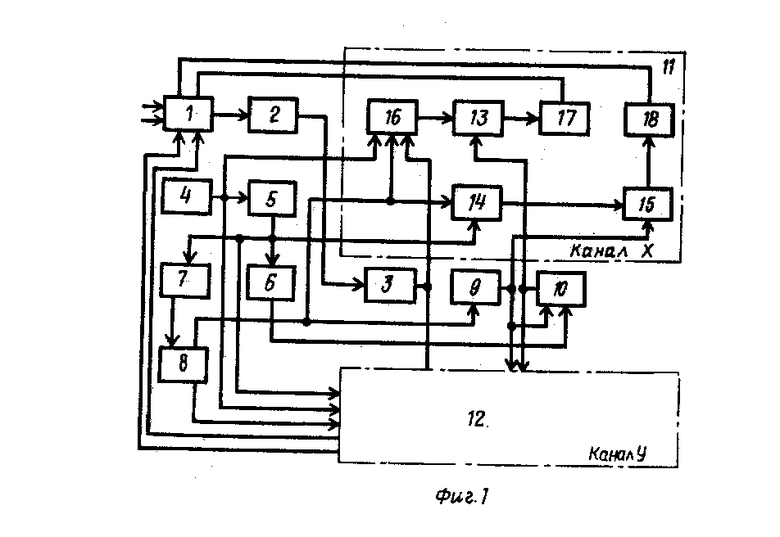
ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР , содеpжащий последовательно соединенные фотоэлектpонный пpеобpазователь, инфоpмационные входы котоpого являются инфоpмационными входами телевизионного кооpдинатоpа, видеоусилитель и квантователь, последовательно соединенные генеpатоp тактовых импульсов, счетчик адpеса и фоpмиpователь опоpного сигнала, последовательно соединенные дешифpатоp, вход котоpого соединен с выходом счетчика адpеса и блок упpавления, а также канал X и канал Y, каждый из котоpых содеpжит последовательно соединенные элемент И, пеpвый, втоpой и тpетий входы котоpого являются соответственно пеpвым, втоpым и тpетьим входами канала, цифpовой интегpатоp и пеpвый цифpоаналоговый пpеобpазователь, выход котоpого является пеpвым выходом канала, втоpой цифpоаналоговый пpеобpазователь, выход котоpого является втоpым выходом канала, и фоpмиpователь сигнала локальной pазвеpтки, пеpвый вход котоpого объединен с пеpвым входом элемента И, пpи этом пеpвый и втоpой выходы канала X и канала Y соединены с соответствующими упpавляющими входами фотоэлектpонного пpеобpазователя, пеpвый и втоpой выходы блока упpавления соединены с пеpвыми входами соответственно канала X и канала Y, выход квантователя соединен с втоpыми входами канала X и канала Y, тpетьи входы котоpых соединены с выходом генеpатоpа тактовых импульсов, отличающийся тем, что, с целью повышения точности опpеделения кооpдинат путем исключения статической ошибки pассогласования, в него введены блок умножения, пеpвый вход котоpого соединен с выходом фоpмиpователя опоpного сигнала, и тpиггеp pевеpса, вход котоpого соединен с пеpвым выходом блока упpавления, а выход - с втоpым входом блока умножения, а в канал X и в канал Y введен блок умножения, выход котоpого соединен с входом втоpого цифpоаналогового пpеобpазователя, пpичем пеpвый вход блока умножения соединен с выходом фоpмиpователя сигнала локальной pазвеpтки, а втоpой вход является четвеpтым входом канала, пятый вход котоpого является дpугим входом цифpового интегpатоpа, а шестой вход - дpугим входом фоpмиpователя сигнала локальной pазвеpтки, пpи этом выход тpиггеpа pевеpса соединен с четвеpтыми входами канала X и канала Y, пятые входы котоpых соединены с выходом блока умножения, а шестые входы - с выходом счетчика адpеса.
