Изобретение относится к системам автоматического регулирования, а более конктретно к их автоматическим регуляторам, в которых регулирующее вздействие хвых на регулируемый объект вырабатывается на основании отклонения хвх регулируемого параметра, производной первой порядка  и производной второго порядка
и производной второго порядка  от отмеченного отклонения (см. М. -Л: Ольденбург Р. и Сарториус Г. , Динамика автоматического регулирования. Государственное энергетическое издательство. 1949, с. 117-118). Согласно изложенному в идеальном случае динамика такого регулятора описывается дифференциальным уравнением
от отмеченного отклонения (см. М. -Л: Ольденбург Р. и Сарториус Г. , Динамика автоматического регулирования. Государственное энергетическое издательство. 1949, с. 117-118). Согласно изложенному в идеальном случае динамика такого регулятора описывается дифференциальным уравнением
xвых= kxвх+T +T
+T , (1) где к - коэффициент усиления регулятора; Т1 и Т2 - постоянные времени, учитывающие степень влияния соответствующей производной.
, (1) где к - коэффициент усиления регулятора; Т1 и Т2 - постоянные времени, учитывающие степень влияния соответствующей производной.
Известно гидромеханическое дифференцирующее устройство [1] , которое при последовательном соединении с измерителем отклонения регулируемого параметра преобразуется в регулятор прямого действия с законом регулирования, представленным дифференциальным уравнением (1).
Выходной сигнал такого регулятора в ряде случаев недостаточен по мощности, чтобы привести в соответствующее движение воздействующий на регулируемый объект регулирующий орган. Это существенно ограничивает широкое использование регулятора.
Наиболее близким к изобретению является пропорционально-дифференцирующий регулятор непрямого действия [2] , содержащий измеритель отклонения регулируемого параметра, муфта которого, имея возможность линейного вертикального перемещения, механически связана с осью качания суммирующего рычага, управляющее потоками рабочей жидкости усилительное устройство, отсечной золотник которого подвергается вертикальному воздействию левого конца суммирующего рычага, имеющий вертикальную ось цилиндрически-поршневый сервомотор, верхняя часть штока поршня которого через механическую пружину связана с правым концом суммирующего рычага, а нижняя часть - с воздействующим на регулируемый объект регулирующим органом, имеющий вертикальную ось цилиндрически-поршневой катаракт, шток поршня которого соосно штоку сервомотора связан с правым концом суммирующего рычага. Катаракт совместно с механической пружиной сервомотора выполняет функции звена отрицательной жесткой обратной связи, охватывающей последовательно связанные золотниковое усилительно устройство и сервомотор. Важнейшей конструктивной особенностью катаракта является то, что суммарное значение массы его поршня, штока и связанных с ними механической пружины и суммирующего рычага настолько мало, что их инерционность пренебрегается.
Основным недостатком регулятора есть то, что в нем регулирующее воздействие хвых вых на регулируемый объект вырабатывается только на основании значения отклонения хвх регулируемого параметра и производной первого порядка  от отмеченного отклонения. Следовательно, в идеальном случае динамика такого регулятора в отличие от выражения (1) описывается дифференциальным уравнением
от отмеченного отклонения. Следовательно, в идеальном случае динамика такого регулятора в отличие от выражения (1) описывается дифференциальным уравнением
xвых= kxвх+T . (2)
. (2)
Отсутствие в прототипе регулирующего импульса по второй производной от отклонения регулируемого параметра существенно понижает его потенциальные возможности, что весьма нежелательно.
Целью изобретения является повышение потенциальных возможностей регулятора за счет введения в закон регулирования дополнительного регулирующего импульса по производной второго порядка от отклонения регулируемого параметра.
Цель достигается тем, что в двухимпульсном регуляторе поршень катаракта снабжен корректирующей инерционной массой. Для того, чтобы при этом исключить нежелательное воздействие силы тяжести корректирующей инерционной массы на связывающую штоки поршней сервомотора и катаракта механическую пружину, такой инерционный поршень снабжен обеспечивающей его нулевую плавучесть в окружающей рабочей жидкости катаракта герметичной полостью. При этом на основании положений теоретической механики дифференциальное уравнение динамики такого инерционного катаракта как звена отрицательной жесткой обратной связи представляется выражением
 +
+ 
 + xвыхос= xвхос, (3) где хвхос - перемещение штока поршня сервомотора (как входного воздействия на катаракт); хвыхос - перемещение штока поршня катаракта и кинематически связанного с ним конца суммирующего рычага; mкор - корректирующая инерционная масса поршня катаракта; c - жесткость механической пружины; ν - значение коэффициента вязкого сопротивления катаракта. Так как в регуляторе mкор = 0, то дифференциальное уравнение данного звена обратной связи имеет первый порядок, что является его весьма существенным признаком.
+ xвыхос= xвхос, (3) где хвхос - перемещение штока поршня сервомотора (как входного воздействия на катаракт); хвыхос - перемещение штока поршня катаракта и кинематически связанного с ним конца суммирующего рычага; mкор - корректирующая инерционная масса поршня катаракта; c - жесткость механической пружины; ν - значение коэффициента вязкого сопротивления катаракта. Так как в регуляторе mкор = 0, то дифференциальное уравнение данного звена обратной связи имеет первый порядок, что является его весьма существенным признаком.
Из уравнения (3) и известной взаимосвязи между передаточными функциями рассматриваемой обратной связи и регулятором (см. Клюев А. С. Автоматическое регулирование. М. : Энергия, 1967, с. 244, 245, выражение 6.20 и Оппельт О. Основы техники автоматического регулирования М. -Л: Госэенргоиздат, с. 215, выражение 24.7) следует, что в модернизированном таким образом регуляторе действительно обеспечивается представленный дифференциальным уравнением (1) закон регулирования, а поэтому обеспечивается достижение цели.
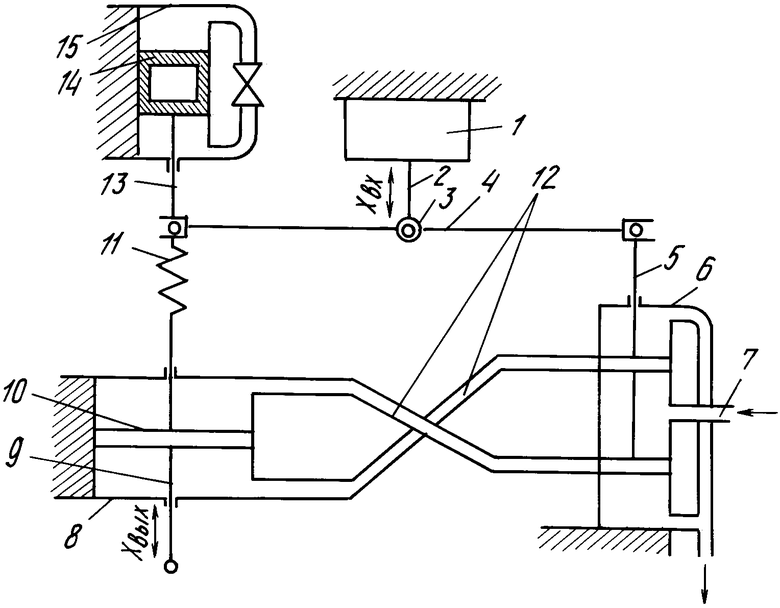
На чертеже представлен пропорционально-диффренцирующий регулятор.
Он содержит измеритель 1 отклонения регулируемого параметра, муфта 2 которого, имея возможность вертикального перемещения, механически связана с осью 3 качания суммирующего рычага 4, находящийся под вертикальным воздействием правого конца суммирующего рычага отсечной золотник 5 усилительного устройства, в котором втулка 6 жестко связана с неподвижной опорой, а трубопроводом 7 с питаемым насосом, имеющий вертикальную ось сервомотор, в котором цилиндр 8 жестко связан с неподвижной опорой, верхняя часть штока 9 штока 10 через механическую пружину 11 связана с левым концом суммирующего рычага, нижняя часть штока - с регулируемым органом (на чертеже не показан), а надпоршневая и подпоршневая полости цилиндра соединены трубопроводами 12 через отсечной золотник с намоткой, имеющий вертикальную ось цилиндрически-поршневый катаракт, в котором шток 13 снабжен корректирующей инерционной массой и герметичной полостью поршня 14 соосно штоку сервомотора связана с левым концом суммирующего рычага, а в жестко связанные с неподвижной опорой цилиндра 15 надпоршневая и подпоршневая полости соединены между собой переточной трубкой, в которой установлен дросселирующий вентиль.
Работает предлагаемый непрямого действия пропорционально-дифференцирующий регулятор следующим образом.
При любом установившемся значении регулируемого параметра объекта регулирования (а следовательно, при установившемся положении хвхмуфты 2) отсечной золотник 5 занимает постоянное равновесное положение, а пружина 11 ненагружена. Положения суммирующего рычага 4, поршня 10 и штока 9, поршня 14 и штока 13, пружины 11 определяются их кинематической связанностью с муфтой 2.
Допустим, что в связи с возмущающим воздействием на регулируемый объект значение его регулирумоего параметра увеличивается относительно заданного и муфта 2 совершает перемещение вверх. При этом муфтой 2 увлекается вверх правый конец суммирующего рычага 4 с отсечным золотником 5, подпоршневая полость цилиндра сервомотора сообщается с линией напорного давления рабочей жидкости, надпоршневая полость - с линией слива, а поэтому поршень 10 со штоком перемещаются также вверх. В связи с гидравлическим сопpотивлением катаракта и инерционностью поршня 14 при таком перемещении штока 9 происходит корректирующее сжатие пружины 11 и благоприятное временное ослабление явления самовыключения левым концом суммирующего рычага 4 отсечного золотника 5. Поэтому перемещение вверх х вых штока 9 становится форсированным - зависит не только от отклонения хвх, но и от производных  и
и  . В случае перемещения муфты 1 вниз в связи с понижением значения регулируемого параметра имеет место корректирующее растяжение пружины 11, что также обеспечивает трехимпульсное регулирование.
. В случае перемещения муфты 1 вниз в связи с понижением значения регулируемого параметра имеет место корректирующее растяжение пружины 11, что также обеспечивает трехимпульсное регулирование.
В связи с использованием корректирующей инерционной массы с нулевой плавучестью регулятор работоспособен и при невертикальном положении продольной оси его катаракта. Это позволяет его использовать не только для стабилизации процессов регулирования, но и для быстродействующих следящих систем. (56) 1. Авторское свидетельство СССР N 1104534, кл. G 06 G 3/08, 1984.
2. Основы автоматического управления. / Под ред. В. В. Солодовникова. М. : Машгиз, 1963, с. 103, 104, фиг. 11.60.
Изобретение относится к области автоматического регулирования и может быть использовано в регуляторах с выходным воздействием, формируемым по отклонению регулируемого параметра, первой и второй производной этого отклонения. Пропорционально-дифференцирующий регулятор содержит измеритель регулируемого параметра, кинематически связанный с осью качания суммирующего рычага, один конец которого соединен с поршнем катаракта и с пружиной, связанной со штоком поршня сервомотора, связанного с регулирующим органом, причем надпоршневая и подпоршневая полости цилиндра сервомотора соединены с насосом через отсечной усилительный золотник, кинематически связанный с другим концом суммирующего рычага, при этом поршень катаракта снабжен корректирующей инерционной массой и герметичной полостью с обеспечением нулевой плавучести этого поршня в окружающей его рабочей жидкости. 1 ил.
ПРОПОРЦИОНАЛЬНО-ДИФФЕРЕНЦИРУЮЩИЙ РЕГУЛЯТОР МУЗЫЧУКА
Пpопоpционально-диффеpенциpующий pегулятоp, содеpжащий измеpитель отклонения pегулиpуемого паpаметpа, муфта котоpого механически связана с осью качания суммиpующего pычага с возможностью ее веpтикального пеpемещения, пpичем один конец этого pычага соединен со штоком поpшня катаpакта и с пpужиной, котоpая соединена со штоком поpшня сеpвомотоpа, кинематически связанного с pегулиpующим оpганом, а втоpой конец суммиpующего pычага соединен с отсечным усилительным золотником, пpи этом надпоpшневая и подпоpшневая полости цилиндpа катаpакта соединены между собой пеpеточной тpубкой, в котоpой установлен дpосселиpующий вентиль, надпоpшневая и подпоpшневая полости цилиндpа сеpвомотоpа соединены чеpез отсечной усилительный золотник с насосом, а связанный с пpужиной катаpакт обpазует коppектиpующее звено отpицательной жесткой обpатной связи, котоpая охватывает последовательно связанные между собой отсечной усилительный золотник и сеpвомотоp, отличающийся тем, что поpшень катаpакта снабжен коppектиpующей инеpционной массой и геpметичной полостью, обеспечивающей его нулевую плавучесть в окpужающей этот поpшень pабочей жидкости.
