Изобретение относится к области автоматического регулирования и может быть использовано в изодромных системах регулирования, в которых муфта измерителя отклонения регулируемой величины имеет механический выход, например, прямолинейного поступательного движения.
Известна изодромная сервомоторная система автоматического регулирования расхода газа (см. Крутов В. И. и др. Основы теории автоматического регулирования. М. Машиностроение, 1969, с. 220-221, рис. 127).
Известна также система автоматического регулирования частоты вращения двигателя внутреннего сгорания (см. Айзерман М. А. Теория автоматического регулирования двигателей. М. : Государственное издательство технико-теоретической литерату- ры, М. , 1952, с. 24-25, фиг. 11).
Важнейшей особенностью приведенных автоматических систем является обеспечение двухимпульсного пpопоpциональ- но-интегрального регулирования как по отклонении регулируемой величины, так и по интегралу от этого отклонения.
Изодромные системы сервомоторного автоматического регулирования имеют одинаковую принципиальную схему (см. Попов Е. П. Автоматическое регулирование и управление, М. : Государственное издательство физико-математической литературы, 1962, с. 268-269, рис. 181). Основными составными частями такой автоматической системы являются измеритель отклонения регулируемого параметра, связанный через муфту с осью качания суммирующего рычага с возможностью ее вертикального перемещения, снабженный управляющим золотниковым устройством гидравлический поршневой сервомотор двойного действия, изодромное устройство в виде гидродемпфера, цилиндр которого жестко связан с штоком сервомотора, а шток поршня связан с упругим элементом, суммирующий рычаг (рычаг обратной связи), связанный с отсечным золотником и штоком поршня гидродемпфера, и узел настройки системы. Данная двухимпульсная изодромная система автоматического регулирования непрямого действия является прототипом изобретения.
Недостатками системы-прототипа являются колебания регулируемого параметра и значительная длительность затухания переходных процессов.
Целью изобретения является повышение точности и улучшение динамических характеристик системы автоматического регулирования непрямого действия путем уменьшения колебаний регулируемой величины и ускорения затухания переходных процессов.
Цель достигается тем, что цилиндр гидродемпфера жестко связан с неподвижной опорой, а его поршень со штоком выполнены с обеспечением нулевой плавучести поршня в окружающей его рабочей жидкости, причем элемент установлен между суммирующим рычагом и осью его качания с обеспечением горизонтального положения суммирующего рычага в его ненагруженном состоянии.
Такое выполнение системы обеспечивает регулирование не только по отклонению и интегралу отклонения, но и по производной от отклонения регулируемого параметра, чем и достигается технический результат.
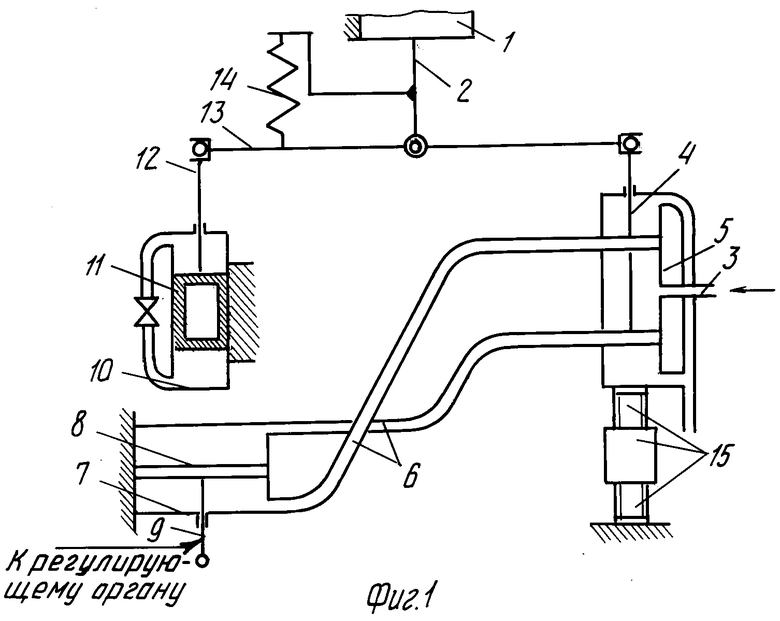
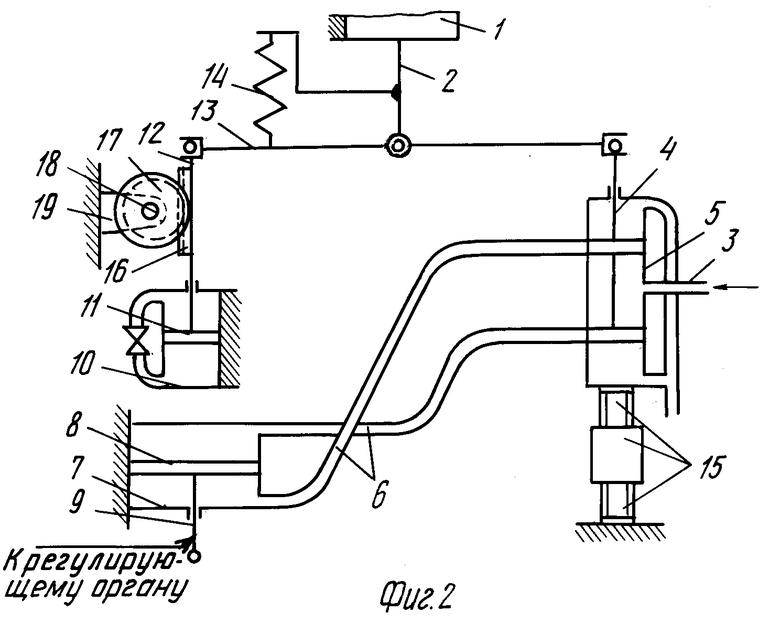
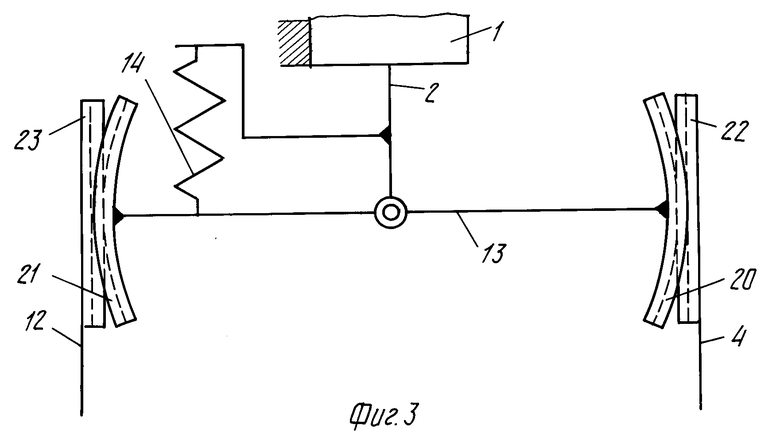
На фиг. 1 показана система с полым поршнем гидродемпфера изодрома; на фиг. 2 - система с облегченной зубчатой рейкой на штоке поршня гидродемпфера, связанной и инерционным цилиндрическим зубчатым колесом; на фиг. 3 - система со с вязью между суммирующим рычагом и штоками поршня гидродемпфера и отсечного золотника в виде зубчатых реечных передач.
Система содержит измеритель 1 отклонения регулируемого параметра, механический выход которого связан через муфту 2 с осью качания облегченного суммирующего рычага с возможностью ее вертикального перемещения, трубопровод 3 подвода рабочей жидкости от насоса (на фигурах не показан) к отсечному золотнику 4, установленному в корпусе 5 и соединенному трубопроводами 6 с надпоршневой полостями цилиндра 7 сервомотора, поршень 8 которого кинематически связан через шток 9 с регулирующим органом, гидродемпфер, цилиндр 10 которого установлен на кронштейне, жестко связанном с неподвижной опорой, а поршень 11 со штоком 12 выполнен с обеспечением нулевой плавучести этого поршня в рабочей жидкости, которой заполнены подпоршневая и подпоршневая полости цилиндра гидродемпфера, соединенные переточной трубкой, в которой установлен дросселирующий вентиль, облегченный суммирующий рычаг 13, упругий элемент-пружину 14 и узел настройки системы в виде винтового механизма 15, связанного с корпусом 5 золотника.
Поршень 11 гидродемпфера может быть снабжен герметичной полостью (фиг. 1), а шток 12 - облегченной зубчатой рейкой 16 (фиг. 2), связанной с инерционным цилиндрическим зубчатым колесом 17, ось 18 которого установлена на кронштейне 19, связанном с неподвижной опорой.
Связь рычага 13 со штоком 12 поршня гидродемпфера и штоком золотника 4 может быть выполнена в виде зубчатых передач с зубчатыми секторами 20 и 21 (фиг. 3), закрепленными на концах рычага 13, и зубчатыми рейками 22 и 23, закрепленными на соответствующих штоках. Пружина 14 установлена между рычагом 13 и осью его качания с обеспечением горизонтального положения рычага 13 в его ненагруженном состоянии.
Система работает следующим образом.
В установившемся режиме, соответствующем заданному винтовым механизмом 15 значению регулируемого параметра, золотник 4 находится в равновесном положении, пружина 14 недеформирована, а шток 9 и регулирующий орган занимает определенное положение.
Если вследствие возмущающего воздействия на объект регулируемый параметр получит положительное отклонение от заданного значения, то ось качания рычага 13 смещается, например, вверх. Перемещается вверх и связанный с рычагом 13 золотник 4. Подпоршневая полость сервомотора соединяется через золотник и трубопровод 3 с нагнетательным патрубком насоса, а надпоршневая полость - с линией слива. Шток 9 также перемещается вверх и изменяет положение регулирующего органа в сторону уменьшения регулируемого параметра.
Существенно, что вследствие гидравлического сопротивления гидродемпфера (пропорционального линейной скорости перемещения оси качания рычага 13) силе инерции приведенных к штоку 12 масс поршня 11 и зубчатого колеса 16 (пропорциональной линейному ускорению оси качания рычага 13) имеет место отставание перемещения левого конца суммирующего рычага 13 относительно правого. При таком перемещении вверх и повороте против часовой стрелки рычага 13 относительно оси его качания происходит растяжение пружины 14 и форсированное перемещение золотника 4, причем на золотник поступает сигнал, являющийся суммой сигналов трех перемещений, пропорциональных отклонению значения регулируемой величины, интегралу и производной от указанного отклонения. (56) Авторское свидетельство СССР N 1104534, кл. G 05 B 3/08, 5/00, 1983.
Попов Е. П. Автоматическое регулирование и управление. М. , 1966, с. 268, 269, рис. 181.
Изобретение относится к области автоматического регулирования и может быть использовано в изодромных системах с механическим выходом измерителя отклонения регулируемого параметра, связанным с осью качания рычага обратной связи с возможностью ее линейного перемещения. Цель изобретения - улучшение динамических характеристик изодромной системы автоматического регулирования за счет уменьшения колебаний регулируемого параметра и ускорения затухания переходных процессов. Для достижения этого технического результата поршень со штоком демпфера изодрома выполнены с обеспечением нулевой плавучести поршня в рабочей жидкости, а упругий элемент установлен между рычагом и осью его качания. 3 з. п. ф-лы, 3 ил.
