Изобретение относится к системам автоматического регулирования различных величин, а более конкретно - к изодромным автоматическим регуляторам непрямого действия, в которых муфта измерителя отклонений регулируемой величины имеет механический выход.
Известен изодромный регулятор расхода газа [1] .
Известен аналогичный изодромный регулятор скорости двигателя внутреннего сгорания [2] .
Важнейшей особенностью автоматических регуляторов является двухимпульсное регулирование как по отклонению регулируемой величины, так и по интегралу от него.
В настоящее время изодромные автоматические регуляторы непрямого действия имеют весьма широкое распространение. Основными составными частями каждого из них являются [3] измеритель отклонения регулируемой величины с механическим выходом муфты, снабженный управляющим отсечным золотником гидравлической цилиндрически поршневой сервомотор, цилиндрически поршневое гидравлическое изодромное устройство, корпус-цилиндр которого жестко связан со штоком сервомотора, а связанный с поршнем шток подпружинен относительно неподвижной опоры, кинематически связывающий муфту измерителя, отсечной золотник и шток изодромного устройства рычаг обратной связи. Данный изодромный автоматический регулятор является прототипом.
Несмотря на то, что конструкция двухимпульсного автоматического регулятора доведена до высокого совершенства, точность автоматического регулирования снабженных такими регуляторами автоматических систем в ряде случаев нуждается в повышении.
Целью изобретения является повышение точности автоматического регулятора непрямого действия путем уменьшения колебательности регулируемой величины и убыстрения затухания переходных процессов.
Для достижения цели в автоматическом регуляторе шток изодромного устройства снабжен "невесомой" относительно последнего корректирующей инерционной массой. При этом обеспечивается трехимпульсное регулирование, т. е. регулирование не только по отклонению регулируемой величины и по интегралу от него, но и по производной от отмеченного отклонения. Наличие производной в законе регулирования, благоприятно форсируя действие регулятора на участке возрастания отклонения регулируемой величины и тормозя его действие на участке уменьшения ее отклонения, способствует достижению указанного технического результата.
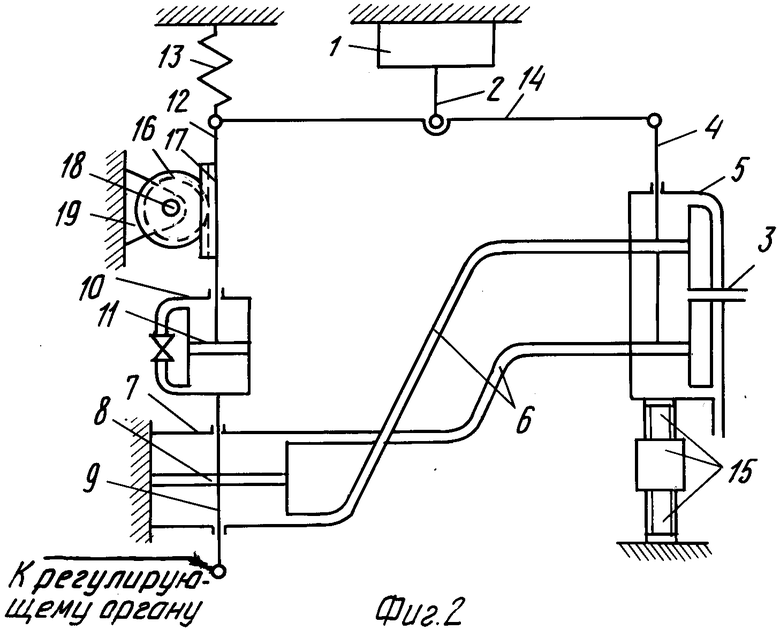
Принципиальная схема регулятора показана на фиг. 1; на фиг. 2 показано выполнение корректирующей инерционной массы в виде цилиндрического зубчатого колеса, связанного со штоком поршня гидродемпфера через продольную облегченную зубчатую рейку.
Регулятор содержит измеритель 1 отклонения регулируемого параметра, связанный через муфту 2 с осью качания рычага обратной связи с возможностью ее вертикального перемещения, трубопровод 3, соединяющий гидронасос (на фигурах не показан) с отсечным золотником 4, корпус 5 которого связан трубопроводами 6 с надпоршневой и подпоршневой полостями цилиндра 7 сервомотора, поршень 8 которого связан через шток 9 с цилиндром 10 гидродемпфера, установленным с возможностью вертикального перемещения. Поршень 11 гидродемпфера связан с корректирующей инерционной массой и снабжен герметичной полостью для обеспечения его нулевой плавучести в рабочей жидкости цилиндра 10. Поршень 11 связан через шток 12 с пружиной 13 и одним из концов рычага 14 обратной связи, другой конец которого связан с золотником 4, корпус 5 которого установлен с возможностью вертикального перемещения и связан с винтовым механизмом 15 настройки регулятора. Гидродемпфер вместе с пружиной 13 образует изодром, а корректирующая инерционная масса может быть выполнена, например, в виде цилиндрического зубчатого колеса 16, связанного через продольную облегченную зубчатую рейку 17 со штоком 12 поршня 11 (фиг. 2). Ось 18 зубчатого колеса 16 установлена на кронштейне 19, связанном с неподвижной опорой.
Регулятор работает следующим образом.
При установившемся режиме работы регулируемая величина имеет заданное винтовым механизмом 15 значение. При этом золотник 4 находится в положении равновесия, пружина 13 практически недеформирована, шток 9 (с регулирующим органом), цилиндр 10, поршень 11 занимают определенные положения.
Допустим, например, что вследствие практически мгновенного одноступенчатого возмущающего воздействия на регулируемый объект получили ступенчатые отклонения регулируемая величина и перемещение вверх муфты 2 измерительного устройства. Как и в прототипе, переходный процесс здесь можно расчленить на два последовательно связанных этапа. На первом статическом этапе имеют место ступенчатое перемещение муфтой 2 вверх только правого конца рычага 14 обратной связи, выход золотника 4 из положения равновесия, перемещение вверх поршня 8, штока 9 (с регулирующим органом), цилиндра 10, поршня 11 и штока 12, сжатие пружины 13 и соответствующее воздействие на золотник 4. На втором изодромном этапе происходят освобождение от деформации пружины 13 (с воздействием на золотник 4) и полная ликвидация статической ошибки системы. Особенностью переходных процессов в предлагаемом регуляторе является то, что благодаря инерционности приведенной к штоку 12 корректирующей массы форсируется воздействие рычага 14 обратной связи на золотник 4 при положительном значении производной от отклонения регулируемой величины и тормозится отмеченное воздействие при ее отрицательном значении. (56) 1. Крутов В. И. и др. Основы теории автоматического регулирования. М. : Машиностроение, 1969, с. 220, 221, рис. 127.
2. Там же, с. 260-261, рис. 159.
3. Попов Е. П. Автоматическое регулирование и управление. М. : Наука, 1966, с. 268, 269, рис. 181.

Изобретение относится к системам автоматического регулирования различных величин, а более конкретно к изодромным автоматическим регуляторам непрямого действия, в которых муфта измерителя отклонений регулировочной величины имеет механический выход. Изобретение позволяет путем уменьшения колебательности регулируемой величины и убыстрения переходных процессов повысить точность регулирования многих автоматических систем. Для этого подпружиненный шток поршня гидродемпфера изодрома связан с приведенной корректирующей инерционной массой, а поршень гидродемпфера снабжен герметичной полостью для обеспечения его нулевой плавучести в рабочей жидкости цилиндра гидродемпфера. Регулятор обеспечивает трехимпульсное регулирование по отклонению, интегралу и производной от отклонения регулируемой величины. 1 з. п. ф-лы, 2 ил.
