Изобретение относится к сервомоторным системам автоматического регулирования, в которых муфта измерителя отклонений регулируемой величины имеет механический выход, например, в виде соответствующего прямолинейного поступательного перемещения.
Известна изодромная сервомоторная система автоматического регулирования расхода газа (см. Крутов В. И. и др. Основы теории автоматического регулирования. М. : Машиностроение , 1979, с. 220-221, рис. 127).
Также известна аналогичная система автоматического регулирования частоты вращения двигателя внутреннего сгорания (см. Айзерман М. А. , Теория автоматического регулирования двигателей. М. Государственное издательство технико-теоретичес- кой литературы, 1952, с. 24-25, фиг. 11).
Важнейшие особенности приведенных систем автоматического регулирования следующие: каждый автоматический регулятор системы обеспечивает весьма эффективное двухимпульсное пропорционально-интегральное регулирование (по отклонению регулируемой величины и по интегралу от этого отклонения), составные части автоматического регулятора, в которых осуществляется распределительный и исполни- тельный процессы, практически пространственно не удалены друг от друга.
В настоящее время такие изодромные системы сервомоторного автоматического регулирования имеют весьма широкое распространение и общую для них принципиальную схему (см. Попов Е. П. Автоматическое регулирование и управление, М. : Наука, с. 268-269, рис. 181). Основными составными частями каждой такой автоматической системы являются регулируемый объект и пропорционально-интегральный автоматический регулятор, содержащий измеритель отклонения регулируемого параметра , шток которого связан через муфту с осью качания суммирующего рычага с возможностью вертикального перемещения этой оси, корректирующее звено, в виде гидравлического демпфера, двуплечий суммирующий рычаг (рычаг обратной связи), кинематически связанный со штоком поршня демпфера и отсеченным усилительным золотником, гидравлический поршневой сервомотор двустороннего действия, шток которого связан с регулирующим органом, а надпоршневая и подпоршневая полости гидравлически связаны через отсечной золотник с насосом, механизм настройки системы, связанный с подвижно установленным корпусом отсечного золотника. Указанная система является прототипом изобретения.
Целью изобретения является улучшение функциональных и эксплуатационных характеристик системы. Цель достигается тем, что упругий элемент установлен между суммирующим рычагом и осью его качания с обеспечением подпружинивания угловых перемещений рычага, цилиндр гидравлического демпфера жестко закреплен на неподвижном основании.
Сервомоторная система изодромного автоматического регулирования представлена на чертеже.
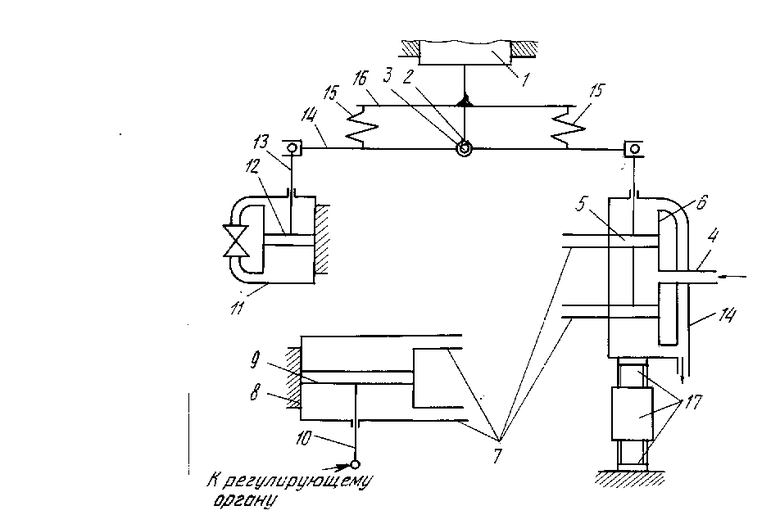
Система содержит измеритель 1 отклонения регулируемого параметра, шток которого связан через муфту 2 с осью 3 качания двуплечего суммирующего рычага, трубопровод 4 подвода рабочей жидкости от насоса к отсеченному усилительному золотнику 5, корпус 6 которого связан трубопроводами 7 с надпоршневой и подпоршневой полостями цилиндра 8 гидравлического сервомотора, поршень 9 которого связан через шток 10 с регулирующим органом (на чертеже не показан), корректирующее звено в виде гидравлического демпфера, цилиндр 11 которого закреплен на неподвижном основании, а облегченный поршень 12 связан через облегченный шток 13 с облегченным суммирующим рычагом 14, который соединен через упругий элемент, например, с осью 3. Узел подпружинивания угловых перемещений рычага 14 относительно оси 3 может быть выполнен например, в виде винтовых цилиндрических пружин 15, установленных между плечами рычага 14 и соответствующими концами симметричного двуплечего стержня 16, жестко связанного со штоком измерителя 1. Система снабжена винтовым механизмом 17 настройки, связанным с подвижно установленным корпусом 6 золотника.
Предлагаемая система автоматического регулирования работает следующим образом.
В случае установившегося режима работы предлагаемой системы регулируемая величина всегда имеет заданное винтовым механизмом 17 значение, золотник 5 находится в равновесном положении, пружины 15 недеформированы, шток 10 (с регулирующим органом) занимает определенное положение.
При переходных процессах управляющий потоками рабочей жидкости золотник 5 находится под двумя воздействиями: воздействием в связи с линейным перемещением муфты 2 (пропорциональным отклонению регулируемого параметра), воздействием в связи с корректирующим поворотом суммирующего рычага 14 относительно оси 3 (пропороциональным производной по времени от отклонения регулирующей величины). Данное воздействие появляется в связи с вязким трением при перемещениях поршня 12 в цилиндре 11 и угловым подпружиниванием суммирующего рычага 14 относительно оси 3. Первое входное воздействие преобразуется в регулирующий импульс по интегралу от отклонения регулируемой величины, обеспечивающий ликвидацию статической ошибки системы. Второе входное воздействие преобразуется в регулирующий импульс по отклонении регулируемой величины относительно заданного винтовым механизмом 17 значения.
Система обеспечивает повышение качества регулирования и возможность его дистанционного осуществления. (56) Крутов В. И. и др. Основы теории автоматического регулирования. М. : Машиностроение, 1979, с. 220, 221, рис. 127.
Попов Е. П. Автоматическое регулирование и управление. M. : Наука, 1962, с. 268, 269, рис. 181.
Изобретение относится к области автоматического регулирования и может быть использовано в сервомоторных системах регулирования с измерителями отклонений регулируемого параметра, имеющими механический выход линейного перемещения. Сервомоторная система изодромного автоматического регулирования содержит измеритель 1 отклонения регулируемого параметра, шток которого связан через муфту 2 с осью 3 качания двуплечего рычага 14, одно плечо которого кинематически связано со штоком поршня гидродемпфера, цилиндр 11 которого закреплен на неподвижном основании, а другое плечо кинематически связано с отсечным усилительным золотником 5, и гидравлический сервомотор, поршень 9 которого кинематически связан с регулирующим органом, а надпоршневая и подпоршневая полости цилиндра 8 соединены через золотник 5 с насосом. Рычаг 14 установлен с обеспечением подпружинивания его угловых перемещений относительно оси его качания, например, с помощью винтовых цилиндрических пружин 15, причем поршень 12 со штоком 13 гидравлического демпфера выполнены предельно облегченными. 2 з. п. ф-лы, 1 ил.