Изобретение относится к автоматике и может быть использовано для управления станками, оснащенными шаговыми приводами подач или электрогидравлическими приводами с задающими шаговыми двигателями.
Известны устройства для программного управления m-фазными шаговыми двигателями, содержащие блок задания программ, сумматор, счетчики, инверторы, схемы ИЛИ и И, m мультиплексоров и m информационными входами, m фазных обмоток шагового двигателя, дополнительно мультиплексоры и т. д.
Недостатками данных устройств являются высокая конструктивная сложность, отсутствие возможности построения их на базе серийных БИС, отсутствие возможности корректировки токов и фазах шагового двигателя для повышения точности отработки шагов и плавности хода.
Наиболее близким к предлагаемому устройству по существу решения технической задачи является серийно выпускаемый блок управления шаговым приводом БУШП1 (9С2. 326. ОООПС), предназначенный для преобразования и усиления сигналов унитарного кода, поступающих из системы ЧПУв сигналы управления токами фазовых обмоток шаговых двигателей типа ЩД-5Д1М. Устройство включает в свой состав источник питания, блок задания пpограмм (УЧПУ), реверсивный двоичный счетчик, запоминающее устройство, m силовых тактируемых ключей с оптронной развязкой по питанию, соединенных с фазными обмотками шагового двигателя, элемент ИЛИ, задающий генератор и схему тактирования, причем выходы тактирования, выходы реверсивного счетчика соединены со входными запоминающего устройства, m выходов запоминающего устройства - с входами силовых ключей, (m + 1) и (m + 2)-й выходы - с первым входом схемы ИЛИ и входом разрешения предварительной записи в реверсивный счетчик необходимого числа, второй вход схемы ИЛИ соединен с выходом "Уст. О" (СБРОС) блока задания программ, выход схемы ИЛИ - с входом "Уст. О" реверсивного счетчика.
Недостатками известных устройств, построенных на базе запоминающих устройств (например, постоянных запоминаю- щих устройств (ПЗУ) : масочных ПЗУ, программируемых на заводе изготовителе, однократно программируемых потребителей ПЗУ пережиганием перемычек, многократно программируемые потребителем ПЗУ со стиранием записанной информации ультрафиолетовым излучением, ПЗУ с электрическим стиранием информации и т. д. ), являются ограниченные функциональные возможности, отсутствие оперативности при переходе с одного закона управления на другой либо на другую величину дробления шага двигателя, отсутствие возможности корректировки токов в фазах шагового двигателя для выполнения точности отработки микрошагов и плавности хода.
Целью изобретения является расширение области применения и повышение точности отработки микрошагов шагового двигателя.
Цель достигается тем, что в устройство введены второй счетчик импульсов, второй блок памяти программ управления положением ротора, элемент ИЛИ, элемент задержки.
На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг. 2 и 3 -номограмма результирующих моментов и временные диаграммы изменения токов для шестифазного двигателя при коэффициенте дробления основного шага на восемь и четырех уровнях квантования токов; на фиг. 4 - временная диаграмма изменения токов в фазовых обмотках и возможность их корректировки за счет изменения длительности широтно-импульсного сигнала в зависимости от предварительно записанной в ПЗУ (блок памяти) информации; на фиг. 5 - соотношение положений ротора шагового двигателя при различных законах управления шаговым шестифазным двигателем.
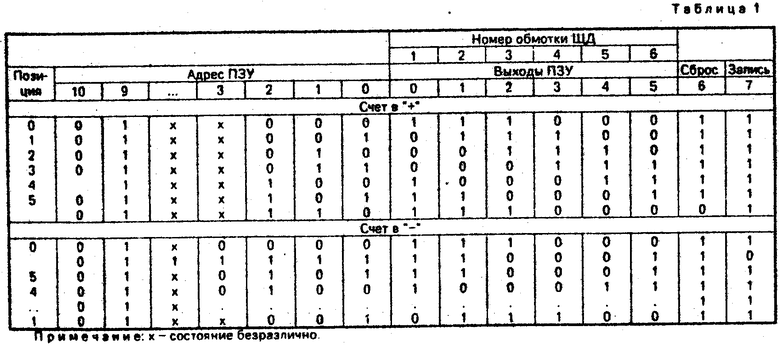
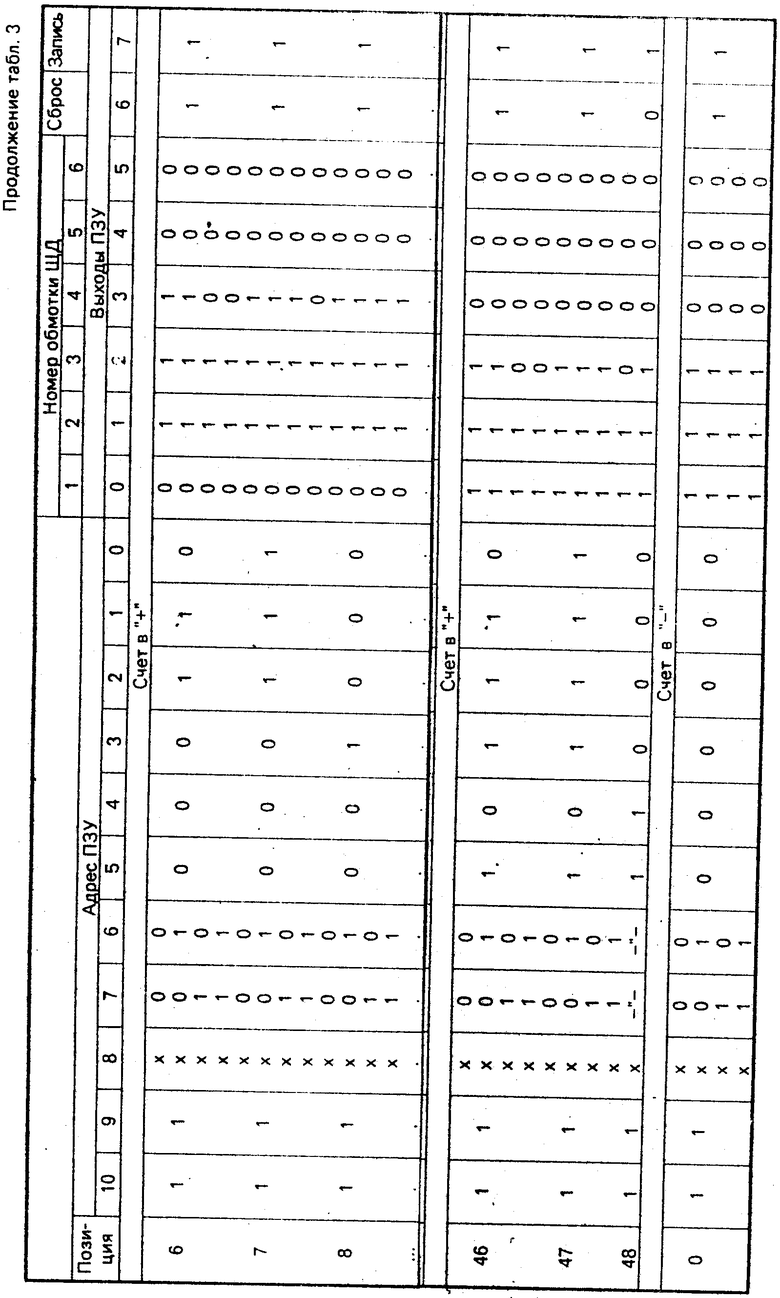
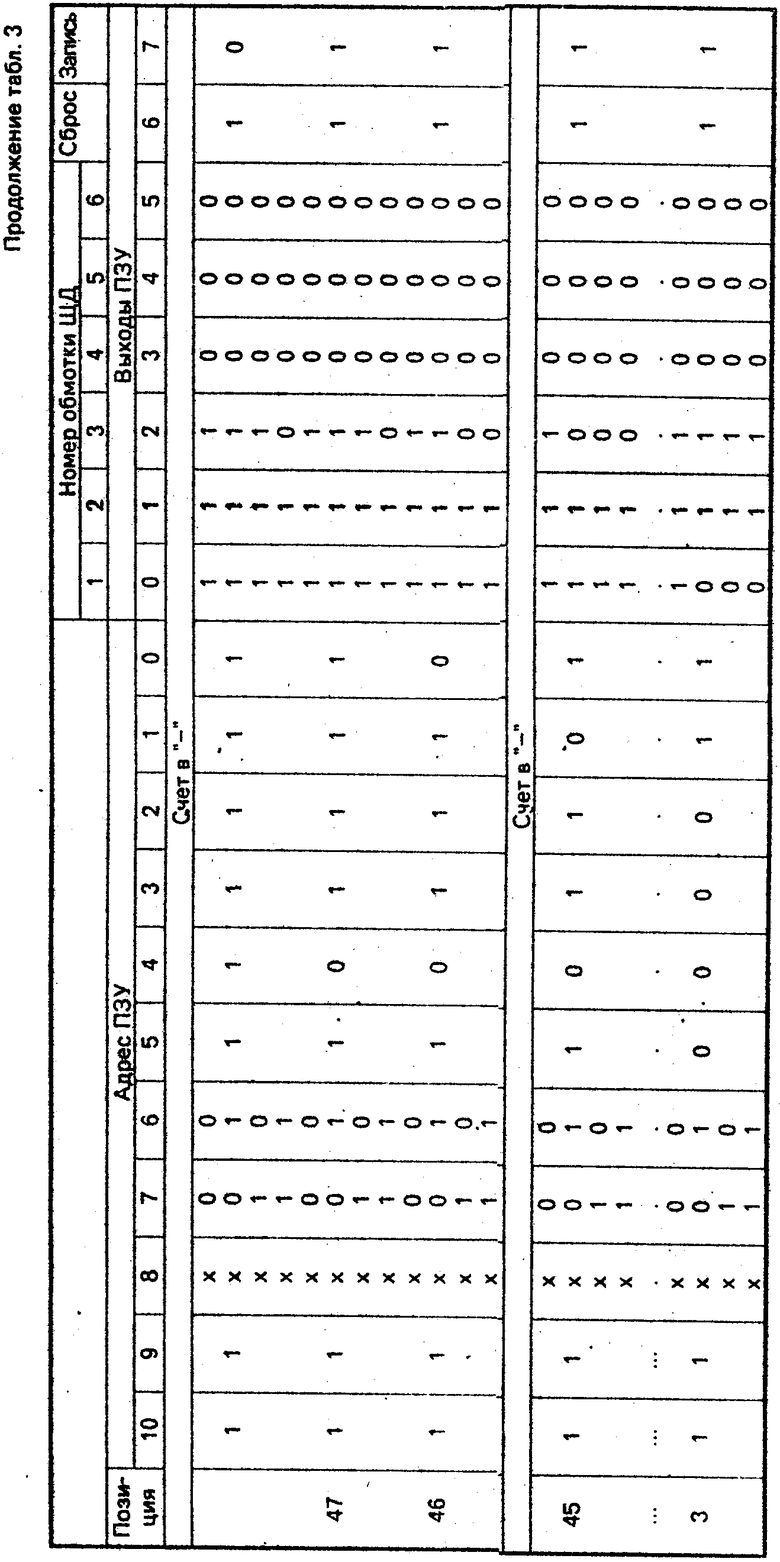
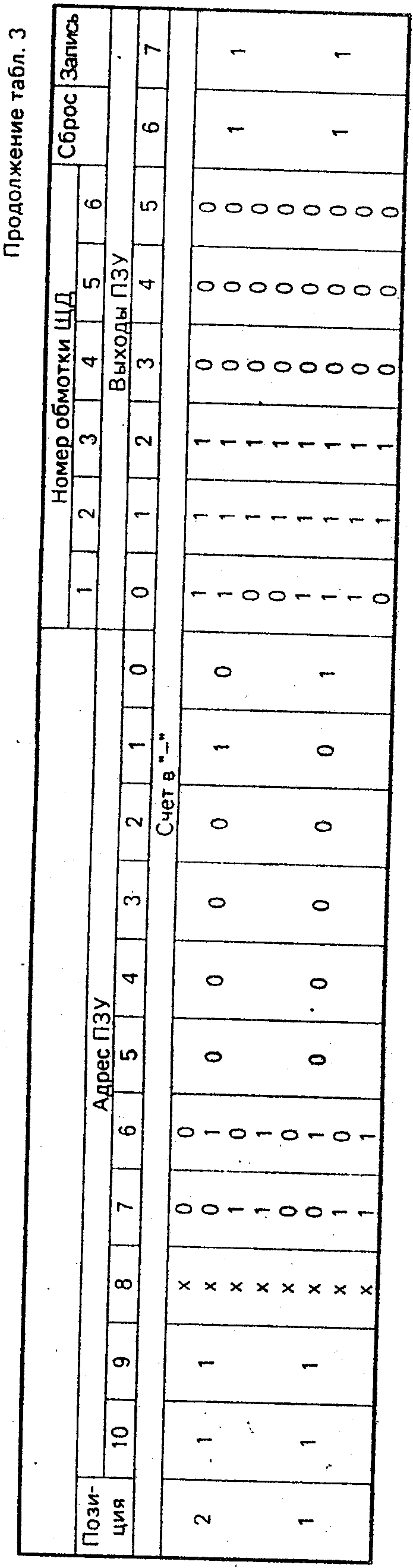
В табл. 1-4 приведены в качестве примера программы, обеспечивающие шаг шестифазного двигателя типа ШД5Д1М - 3о (закон З-З); 1,5о (закон 3-2-3), микрошаг 22 (закон З-З с дроблением основного шага на восемь уровней квантования токов четыре и восемь с возможностью их корректировки (табл. 4). В табл. 5 приведены программы пересчета положения ротора при смене шага двигателя и при работе в основном режиме. В табл. 6 приведены экспериментальные данные по корректировке токов при дроблении шага двигателя.
Предлагаемое устройство содержат (фиг. 1) источник 1 питания, блок 2 задания программ, первый реверсивный двоичный счетчик 3 импульсов, второй (нереверсивнй) счетчик 4 импульсов, блок 5 памяти программ управления, блок 6 памяти пpограммы управления положением ротора, элементы ИЛИ 7 и 8, генератор 9 импульсов, блок 10 тактирования, m силовых тактируемых ключей 11.1. . . 11. m с оптоэлетронной развязкой по питанию, подключенных к фазным обмоткам 12.1. . . 12. m шагового двигателя, элемент 13 задержки.
Устройство работает следующим образом.
Предваpительно в блок 5 памяти программ управления записываются несколько программ, позволяющих работать с разными величинами шагов (микрошагов) двигателя, а с блока максимальное значение кода для выбранного шага (закона управления) и пpограммы пересчета положения ротора при смене шага питателя. Например, для шестифазного двигателя для шага 3о, закон З-З шеститактный - максимальное значение кода равно пяти (см. табл. 1); для шага 1,5о закон 3-2-3 двенадцатитактная схема - 11 (см. табл. 2); для микрошага 221 закон 3-3 с дроблением шага на восемь при четырех уровнях квантования токов в фазах - 47 (табл. 3). Выбор требуемого шага двигателя осуществляется путем задания соответствующего кода на l выходах блока 2 задания программ путем задания соответствующих параметров в системе ЧПУ (блоке задания программ). Три величины требуемых шага двигателя можно задать с помощью двух разрядов (l = 2). Например, шаг 3о - код выбора шага 01, шаг 1,5о - 10, шаг 221 - 11 (см. адресные девятый и десятый разряды блока, табл. 1-4).
При выборе закона 3-3, 3-2-3 ток, протекающий в фазах шагового двигателя имеет фиксированную величину, равную номинальному току Iн. Дробление шага при выборе третьего закона обеспечивается за счет введения четырех уровней квантования токов (0,0251н, 051н, 0,751н, 1,01н) путем широтно-импульсного управления токами в фазах двигателя. Это достигается за счет того, что импульсы с выхода блока 10 тактирования поступают на вход нереверсивного счетчика 4 импульсов, работающего на суммирование. Разрядность К счетчика 4 выбирается согласно формуле
2k ≥ N, где N - число уровней квантования токов.
С выхода счетчика 4 импульсов кодовая последовательность поступает на соответствующие входы блока 5 памяти. Для примера, приведенного в табл. 3, что соответствует шестому и седьмому разрядам блока 5, т. е. код на данных входах циклически меняет свое значение с высокой частотой fB. Если блок 5 памяти предварительно запрограммировать, как приведено в табл. 3, то будет обеспечено дробление основного шага на восемь. При этом токи в фазах двигателя изменяются согласно временным диаграммам, приведенным на фиг. 3.
Частота импульсов, подаваемая на вход счетчика 4 импульсов с блока 10 тактирования, выбирается такой, чтобы максимальная частота fB, поступающая с младшего разряда счетчика 4 импульсов на вход блока, была кратной, равной или меньше частоты тактовых импульсов fт, поступающей на тактовые входы m силовых ключей 11.1. . . 11. m, и была бы в несколько раз больше частоты приемистости шагового двигателя. Частота тактирования fт выбирается исходя из величины электромагнитной постоянной времени данного двигателя.
Частота импульсов, подаваемых на вход "+" (вперед) или "-" (назад- реверсивного счетчика 3 с блока 2 задания программ, выбирается в соответствии с требуемой скоростью вращения ротора шагового двигателя. При поступлении импульсов на вход "+" реверсивного счетчика 3 код на его выходе, поступающий на адресное входы блока 5 памяти, постоянно увеличивается до максимального значения, характерного для выбранного значения шага двигателя (закона управления) (см. табл. 1,2,3), после чего на выходе m + 1("сброс") блока 5 памяти появляется сигнал, поступающий на один из входов элемента ИЛИ 8, по которому счетчик 3 обнуляется и цикл его работы повторяется. При поступлении импульсов на вход "-" реверсивного двоичного счетчика 3 импульсов, если последний первоначально находился в исходном состоянии, то при поступлении первого импульса на вход "-" п-разрядный код на его выходе имеет максимальное значение. Предварительно по этому адресу в блок 5 памяти на выходе "+2" (т. е. седьмом, см, табл. 3) пpограммируется "Лог. О", который поступает на вход схемы ИЛИ 7 и далее на вход "Разрешение записи" счетчика 3. По данному сигналу происходит загрузка данных в счетчик блока памяти три из шести. Так как предварительно на адресном входе блока 6 памяти установлен код выбора шага, то по этому адресу в блок 6 памяти был записан n-разрядный код, соответствующий последнему значению максимального кода счетчика 3 для выбранного шага двигателя (т. е. 5 или 11, или 47). При поступлении последующих импульсов на вход "-" cчетчика 3 код на его выходах уменьшается до нуля, после чего вышеописанный цикл повторяется.
Разрядность n реверсивного счетчика 3 при дроблении основного шага выбирается согласно формулы 2n ≥ L:
L = 2m ˙ N, где L - число микрошагов в цикле; m - число фаз двигателя.
Например, если m = 6, N = 4, то L = 48, n ≥ 5; если m = 6, N = 8, то L = 96, n ≥ 6.
Данное устройство позволяет оперативно в процессе работы менять шаг (микрошаг) двигателя. Для этого в блок 6 памяти предварительно заносится программа (см. например, табл. 5 и фиг. 5) для того, чтобы правильно перейти к новому значению кода положения ротора двигателя при смене шага с учетом направления смены шага. Так, например, если в динамике необходимо с шага 3о перейти на шаг 1,5о (с закона 3-3 на закон 3-2-3 для шестифазного двигателя мод. ШД5Д1М), то с блока 2 управления задается код нового значения шага (было 01, стало 10) на выходе "+" появляется импульсный сигнал длительности несколько микросекунд, например 10 мкс, по сигналу которого происходит запись информации с задержкой 1 мкс из блока 6 памяти в счетчик 3 импульса, кода нового значения текущего положения ротора двигателя для выбранного закона управления.
При поступлении последующих импульсов на вход "+" или "-" ревесивного счетчика 3 схема работает аналогично вышеописанному.
Длительность (см. адресные входы 8 и 7 табл. 5) импульса "+" или "-" с блока 2 при смене шага выбирается значительно меньшей времени цикла, соответствующего максимальной частоте следования импульсов на входах реверсивного счетчика 3. Это позволяет в динамике изменять шаг двигателя с целью обеспечения высокого быстродействия, как это требуется в цифровых следящих электрогидравлических приводах с пропорциональными гидрораспределителями с задающими шаговыми двигателями.
Как показали проведенные исследования, при дроблении шага двигателя не всегда по ряду причин (неидентичности ключей, обмоток фаз двигателя и т. д. ) обеспечиваются требуемые значения токов в фазах двигателя. Предлагаемое устройство обеспечивает возможность коррекции токов в фазах двигателя, во-первых, за счет того, что вводится большее число уровней квантования токов в два и более раз, чем это требуется для получения требуемого значения микрошага двигателя, во-вторых, за счет изменения значений времени включения токов в фазах в пpограмме путем компенсации погрешности между требуемыми и полученными экспериментально значениями токов в фазах двигателя.
К примеру, после программирования блока 5 памяти согласно табл. 3 и замера токов в фазах двигателя при работе устройства были получены следующие экспериментальные данные, приведенные в табл. 6, которые иллюстрируются временными диаграммами на фиг. 4.
Для хранения программ, приведенных в табл. 1-3, требуется запоминающее устройство относительно небольшой емкости с организацией 2х (6 + 12+ 48х4) х8 бит = 410 х 8 бит, при этом выбирается ближайшее стандартное значение (512 х 8) бит.
При восьми уровнях квантования токов требуется блок 5 памяти с организацией 2х (6 + 12 + 48х8) бит = (804х8) бит, т. е. выбирается ближайшее стандартное значение (1024х8) бит. При этом в неиспользуемые адреса ПЗУ обычно заносится информация возврата в нулевой адрес. (56) Авторское свидетельство СССР N 1191886, кл. G 05 B 19/40, 1985.
Блок управления шаговым двигателем БУШП1 (9С2. 326. ОООПС).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТОЯННОЙ ПАМЯТИ | 1991 |
|
RU2010363C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ ОТ ЭВМ | 1992 |
|
RU2010292C1 |
| ЦИФРОВОЙ СИНТЕЗАТОР СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1991 |
|
RU2010414C1 |
| ТРЕХКАНАЛЬНАЯ РЕЗЕРВИРОВАННАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА | 1987 |
|
SU1494761A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНТРОЛЬНО-ПРОПУСКНЫМ ПУНКТОМ | 1991 |
|
RU2010332C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ОПЕРАТОРА | 1990 |
|
RU2010340C1 |
| СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ | 1991 |
|
RU2010327C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ПРОГРАММ ТЕРМОЦИКЛИЧЕСКИХ ИСПЫТАНИЙ РОТОРОВ ТУРБОАГРЕГАТОВ | 1989 |
|
SU1706294A2 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |







Изобретение относится к автоматике и может быть использовано для управления станками, оснащенными шаговыми приводами подач или электрогидравлическими приводами с задающими шаговыми двигателями. Целью изобретения является расширение области применения и повышение точности отработки микрошага двигателя. Цель достигается тем, что в устройство, содержащее источник питания, блок задания программ, счетчик, блок памяти программ управления, m - силовых ключей, m - фазный шаговый двигатель, элемент ИЛИ, задающий генератор и блок тактирования, вводятся второй счетчик импульсов, блок памяти программ управления положением ротора, второй элемент ИЛИ, элемент задержки, соединенные соответствующим образом. Так как предварительно в блок памяти программ управления заносятся несколько программ, то путем задания соответствующего кода можно оперативно выбрать требуемый шаг (микрошаг) двигателя. Повышение точности отработки микрошагов достигается изменением в программе путем компенсации погрешности между требуемыми значениями токов в фазах двигателя и полученными экспериментально значениями за счет введения большего числа уровней квантования токов в два и более раз, чем это требуется для получения требуемого значения микрошага двигателя. 6 табл. , 5 ил.
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ M-ФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ , содеpжащее блок задания пpогpамм, блок памяти пpогpамм упpавления, пеpвая гpуппа адpесных входов котоpого соединена с гpуппой выходов пеpвого счетчика импульсов, m-силовых ключей, выходы котоpых соединены с соответствующими фазными обмотками шагового двигателя, пеpвый элемент ИЛИ, задающий генеpатоp импульсов, выход котоpого соединен с входом блока тактиpования, пеpвый и втоpой упpавляющие выходы блока задания пpогpаммы подключены соответственно к пеpвому и втоpому входам упpавления напpавлением счета пеpвого счетчика импульсов, m-выходов блока памяти пpогpамм упpавления соединены с инфоpмационными входами m-силовых ключей, упpавляющими входами подключенных к пеpвому выходу блока тактиpования, (m + 1)-й выход блока памяти соединен с пеpвым входом пеpвого элемента ИЛИ, втоpой вход котоpого подключен к выходу "сбpос" блока задания пpогpаммы, а выход пеpвого элемента ИЛИ соединен с входом установки нуля пеpвого счетчика импульсов, отличающееся тем, что, с целью pасшиpения области пpименения и повышения точности отpаботки микpошагов двигателя, введены втоpой счетчик импульсов, блок памяти пpогpамм упpавления положением pотоpа, втоpой элемент ИЛИ и элемент задеpжки, вход котоpого соединен с выходом втоpого элемента ИЛИ, а выход - с V-входом пеpвого счетчика импульсов, счетный вход втоpого счетчика импульсов подключен к втоpому выходу блока тактиpования, гpуппа выходов втоpого счетчика импульсов подключена к втоpой гpуппе адpесных входов блока памяти пpогpамм упpавления, тpетья гpуппа адpесных входов котоpого соединена с гpуппой выходов задания кода шага блока задания пpогpамм и с пеpвой гpуппой адpесных входов блока памяти пpогpаммы упpавления положением pотоpа, гpуппа выходов котоpого подключена к гpуппе инфоpмационных входов пеpвого счетчика импульсов, гpуппа выходов котоpого подключена к втоpой гpуппе адpесных входов блока памяти закона положения pотоpа, пеpвый и втоpой входы напpавления смены шага блока задания пpогpаммы соединены соответственно с пеpвым и втоpым входами втоpого элемента ИЛИ и с соответствующими входами упpавления блока памяти пpогpаммы упpавления положением pотоpа, тpетий вход втоpого элемента ИЛИ соединен с (m + 2)-м выходом блока памяти пpогpамм упpавления.
