Изобретение относится к устройствам ввода-вывода информации с ленточных носителей, а именно к лентопротяжным механизмам.
Известен лентопротяжный механизм, содержащий сопряженный с магнитной лентой бесконечный плоский ремень с приводом от двух линейных электродвигателей, расположенный между двумя парами направляющих роликов [1] .
К недостаткам этого устройства относятся сложность изготовления специальных электродвигателей и трудность поддержания постоянного натяжения ленты в связи с необходимостью изменения длины бесконечного ремня при изменении соотношения радиусов рулонов ленты.
Известен также лентопротяжный механизм, содержащий два рулона с лентой и сопряженный с ними бесконечный эластичный плоский ремень, размещенный на неподвижных и подпружиненных роликах, причем неподвижные ролики вращаются от электродвигателей, обеспечивая отношение скоростей роликов больше единицы [2] .
К недостаткам этого устройства относится непостоянство натяжения ленты на подающем и приемном рулонах и сложность системы обеспечения различного соотношения линейных скоростей краев отводных роликов.
Наиболее близким по технической сущности является лентопротяжный механизм, содержащий два рулона с лентой и сопряженные с ними бесконечные, возможно эластичные ремни, установленные на неподвижных и подпружиненных роликах, неподвижные ролики кинематически соединены с электродвигателями [3] .
Однако в известном устройстве натяжение подпружиненных роликов будет изменяться при изменении соотношения радиусов ленты на рулонах, что будет вызывать изменение натяжения ленты на отдельных рулонах. Кроме того, наличие двух бесконечных ремней усложняет конструкцию, а наличие двух электродвигателей со взаимосвязанной системой управления (для подтормаживания) усложняет систему управления.
Целью изобретения является обеспечение постоянства натяжения ленты и упрощение управления.
С этой целью бесконечный эластичный ремень прижат к каждому рулону с внутренней стороны посредством двух подпружиненных роликов, установленных на дополнительно введенных направляющих с возможностью радиального к осям рулонов перемещения, причем угол между направляющими подпружиненных роликов равен двум радианам.
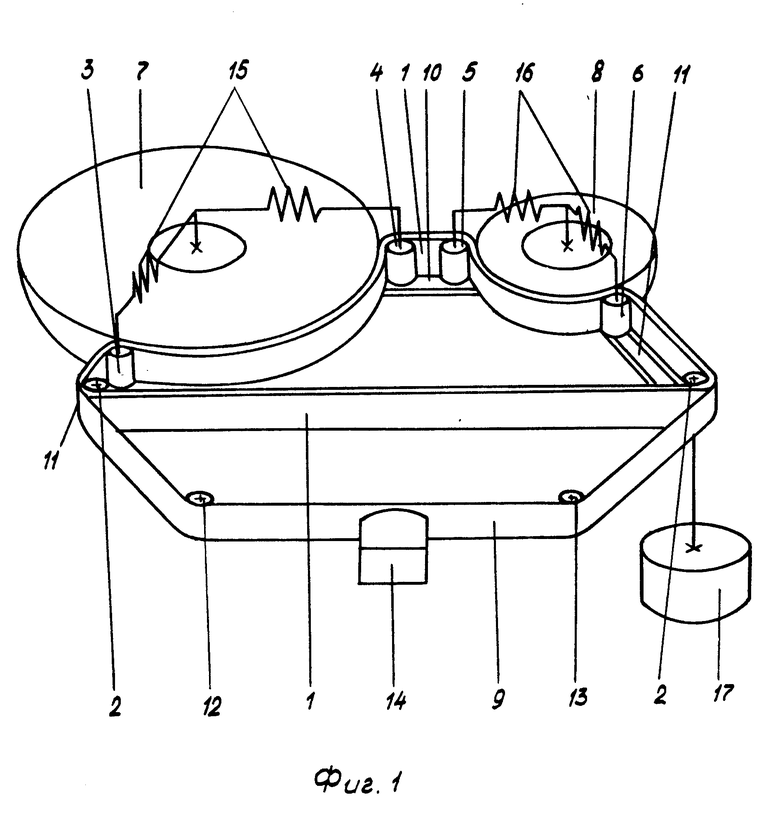
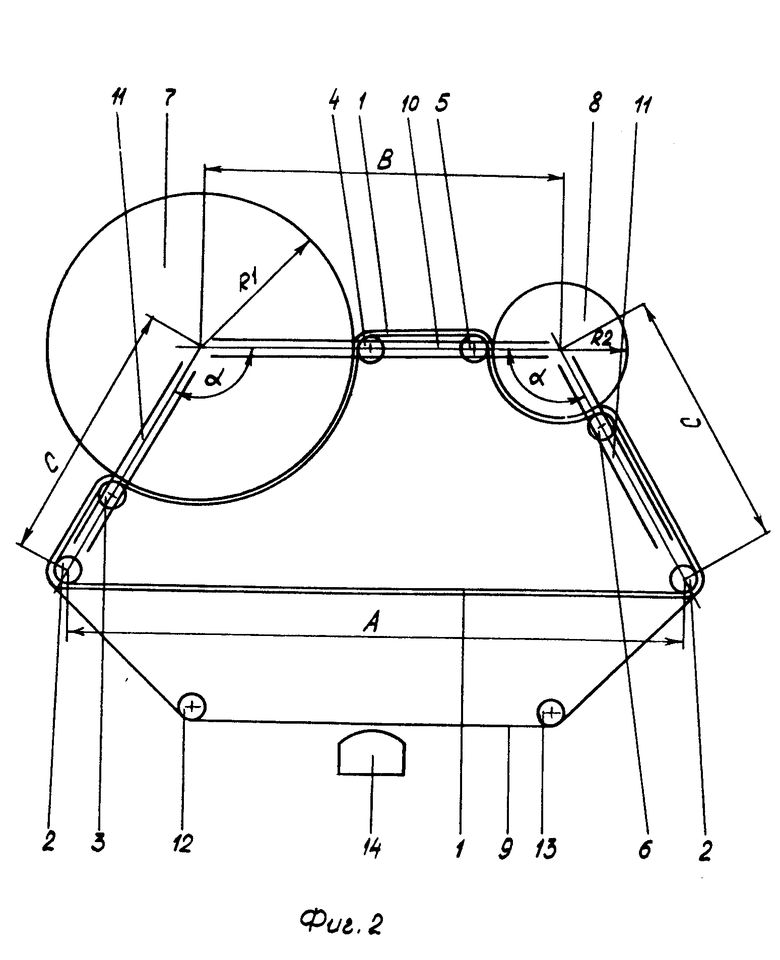
На фиг. 1 показан один из возможных вариантов предложенного лентопротяжного механизма, общий вид; на фиг. 2 - кинематическая схема устройства.
Устройство содержит бесконечный эластичный ремень 1, расположенный на неподвижных роликах 2 и подпружиненных роликах 3-6, которые прижимают бесконечный эластичный ремень 1 к рулонам 7 и 8 с лентой 9. Подпружиненные ролики 3-6 установлены на направляющих 10, 11, расположенных радиально к осям рулонов 7 и 8, с возможностью перемещения по ним. Лента 9 через неподвижные ролики 12, 13 подается на головку 14. Подпружиненные ролики 3-6 соединены с осями рулонов 7 и 8 посредством упругих элементов 15, 16. Привод устройства осуществляется от электродвигателя 17, соединенного с ведущим неподвижным роликом 2. Угол между направляющими 10 и 11 равен двум радианам.
Работает устройство следующим образом.
В исходном положении бесконечным эластичным ремнем 1 устанавливается заданное натяжение ленты, которое в процессе работы зависит от растяжения или длины эластичного ремня 1.
Для перемещения ленты 9 в заданном направлении и с заданной скоростью дается соответствующий сигнал на электродвигатель 17, который посредством ролика 2 воздействует на бесконечный эластичный ремень 1, приводя во вращение сопряженные с ним с лентой 7 и 8 рулоны. В процессе перемотки ленты 9 с одного рулона на другой будет изменяться соотношение радиусов рулонов 7 и 8 и будут происходить соответствующие перемещения подпружиненных роликов 3-6 по направляющим 10 и 11. При этом длина бесконечного ремня 1 остается постоянной, что и обеспечивает постоянное натяжение ленты.
Независимость длины эластичного ремня 1 от соотношения радиусов рулонов 7 и 8 может быть доказана из следующих соотношений, вытекающих из фиг. 2.
Длина бесконечного ремня определяется формулой
L= A+B+2C+6D-2R1-2R2+ α R1+ α R2, где A - расстояние между осями неподвижных роликов 2;
B - расстояние между осями рулонов 7 и 8;
С - расстояние от соей рулонов до осей неподвижных роликов 2;
D - длина отрезков ремня, соприкасающихся с неподвижными и подпружиненными роликами 2-6;
R1 и R2 - радиусы рулонов 7 и 8;
α = 2 рад - угол между направляющими 10 и 11.
Принимая во внимание постоянство величин A, B, C, D, следует, что при предложенном конструктивном исполнении устройства и α = 2 радианам длина бесконечного ремня не зависит от радиусов рулонов, что обеспечивает постоянство его растяжения.
Эластичный ремень 1, кроме обеспечения постоянства натяжения, ленты, обеспечивает эффективное демпфирование ударных усилий, действующих в переходных режимах (пуск, реверс, торможение).
Кроме того, автоматическое обеспечение постоянства натяжения ленты механическим способом позволяет исключить систему управления натяжением ленты, что упрощает управление лентопротяжным механизмом.
(56) 1. Авторское свидетельство СССР N 440695, кл. G 11 B 15/26, 1972.
2. Патент Франции N 2523754, кл. G 11 B 15/26, 1983.
3. Авторское свидетельство СССР N 881849, кл. G 11 B 15/44, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кассета с магнитной лентой | 1979 |
|
SU1065881A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РУЛОНОВ МЕДИЦИНСКОЙ ВАТЫ И АГРЕГАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2009972C1 |
| Реверсивный лентопротяжный механизм | 1980 |
|
SU881849A1 |
| Лентопротяжный механизм | 1979 |
|
SU801069A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ В РУЛОН ЛЕГКОДЕФОРМИРУЕМЫХ МАТЕРИАЛОВ | 2003 |
|
RU2230018C1 |
| Лентопротяжный механизм | 1972 |
|
SU440695A1 |
| Реверсивный лентопротяжный механизм | 1989 |
|
SU1675946A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ НАПРАВЛЯЮЩИХ | 1991 |
|
RU2009828C1 |
| Лентопротяжный механизм | 1981 |
|
SU960941A1 |
| ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2006 |
|
RU2319647C1 |
Использование: для перемещения ленточных носителей информации с постоянным в процессе работы натяжением. Сущность изобретения: устройство содержит два рулона с лентой и сопряженный эластичный ремень, размещенный на неподвижных и подпружиненных роликах таким образом, что длина бесконечного эластичного ремня в процессе работы остается постоянной. Это достигается установкой подпружиненных роликов на радиальных направляющих, расположенных относительно друг друга под углом в 2 рад. 2 ил.
ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ , содеpжащий два pулона с лентой и сопpяженный с ними с внутpенней стоpоны бесконечный эластичный pемень, pазмещенный на подвижном и неподвижных pоликах, электpодвигатель, соединенный с неподвижным pоликом, отличающийся тем, что, с целью повышения постоянства натяжения ленты, он снабжен напpавляющими для pадиального к осям pулонов пеpемещения, а бесконечный эластичный pемень сопpяжен с каждым pулоном посpедством двух подпpужиненных pоликов, установленных на этих напpавляющих, пpи этом длина L бесконечного pемня опpеделяется по выpажению;
L= A+B+2C+6D-2R1-2R2+αR1+
+ αR2,
где A - расстояние между осями неподвижных роликов;
B - рсстояние между осями рулонов;
C - расстояние от осей рулонов до осей неподвижных роликов;
D - длина отрезков ремня, соприкасающаяся с неподвижными и подпружиненными роликами;
R1 и R2 - радиусы рулонов;
α - угол между направляющими подпружиненных роликов.
