Изобретение относится к гидроакустике и может быть использовано для обнаружения источников и измерения уровня гидроакустического давления сигналов в натурном водоеме.
Известна гидроакустическая антенна, применяемая в качестве пеленгатора, содержащая две пары принимающих во всех направлениях одинаково пьезоэлектрических гидрофонов, расположенных крестообразно. Два гидрофона, находящихся на одно перекладине креста, соединены последовательно для формирования замкнутого контура. Такая конструкция позволяет использовать пеленгатор на частотах ниже 30 Гц [1]
Недостатком такой гидроакустической антенны является низкая степень ее направленности.
Известна приемная гидроакустическая антенна с лучевой прожекторной характеристикой направленности, содержащая последовательность N гидрофонов, расположенных с заданным шагом в направлении приема сигналов, и систему формирования лучевой характеристики направленности, выполненную в виде N предварительных усилителей, подключенных входами к выходам N гидрофонов, и N сумматоров, а также регистратор, соединенный с выходами сумматоров [2]
Антенна также содержит N линий задержки, которые накапливают и задерживают сигналы предварительных усилителей таким образом, что на выходах линий задержки появляются сигналы, пришедшие только из мест, соответствующих лучевой диаграмме направленности, ось которой расположена вдоль антенны.
Известна система питания электронной аппаратуры приемной гидроакустической антенны, выполненной в виде морского кабеля, к которому с помощью электрических водонепроницаемых контактов присоединены гидрофоны и электронная аппаратура антенны [3]
Недостатком конструкции такой системы питания является ее малая надежность и неудобство монтажа и демонтажа такой антенны в условиях работы современных остронаправленных гидроакустических антенн, включающих в себя десятки, а иногда и тысячи гидрофонов одновременно.
Известна система питания электронной аппаратуры, которая может быть применена для современных приемных гидроакустических антенн с лучевой диаграммой направленности [4]
Она содержит двухпроводный кабель-шлейф, индуктивно связанный через обмотки индуктора с потребителями электроэнергии и подключенный к генератору высокочастотных колебаний, выполненному в виде последовательно соединенных автогенератора с управляемой частотой, управляемого аттенюатора и усилителя мощности с управляемыми импульсным стабилизатором напряжения, а также дифференциальный усилитель.
Недостатками известных гидроакустической антенны [2] и системы питания [4] являются влияние на их работу изменений гидрофизических факторов натурного водоема.
Недостатком также является влияние на формирование лучевой диаграммы направленности пространственного и временного изменения гидрофизических факторов в натурном водоеме.
Современные приемные гидроакустические антенны имеют большую длину, иногда достигающую десятков километров, при этом они зачастую работают в натурном водоеме круглый год. Это приводит к тому, что отдельные участки антенны находятся в различных гидрологических и климатических зонах натурного водоема. Причем гидрофизическая обстановка, влияющая на скорость звука, меняется как в пространстве, так и во времени в течение года. В связи с этим величина скорости звука в натурном водоеме не может быть постоянной вдоль всей антенны, а это не позволяет задать требуемые задержки сигналов, необходимые для формирования постоянной лучевой диаграммы направленности гидроакустической антенны, не зависящей от внешних факторов, что приводит к погрешностям измерений и уходу коэффициента усиления.
С другой стороны, изменение гидрофизических факторов в натурном водоеме сказывается и на работе системы питания антенны с индуктивной связью. Проводящая соленая вода поглощает электромагнитное поле кабеля-шлейфа и экранирует его, ослабляя индуктивную связь между кабелем-шлейфом и индуктором питания. При этом напряжение на обмотке индуктора неконтролируемо уменьшается. Положение усугубляется тем, что питаемая кабель-шлейфом электронная аппаратура находится в герметичных корпусах, погружена в воду и не имеет доступа для измерения и регулировки напряжения питания в рабочих условиях.
Целью изобретения является устранение влияний изменений гидрофизических факторов натурного водоема на работу приемной гидроакустической антенны и системы питания ее электронной аппаратуры.
Поставленная цель в приемной гидроакустической антенне достигается тем, что в антенну, содержащую последовательность N гидрофонов, расположенных с заданным шагом в направлении приема сигналов, регистратор и систему формирования лучевой диаграммы направленности, выполненной в виде N блоков предварительной обработки сигналов, каждый из которых имеет предварительный усилитель и каждый из которых за исключением первого и последнего, имеет сумматор, причем выходы последнего сумматора подключены к регистратору, система формирования лучевой диаграммы направленности дополнительно содержит последовательность (N-1) широкополосных излучателей, расположенных с тем же шагом, что и гидрофоны, и попарно акустически связанных с ними за исключением последнего гидрофона, а каждый блок предварительной обработки сигналов, кроме первого и последнего, дополнительно содержит фильтр низких частот, полосовой фильтр, модулятор, генератор несущей частоты и усилитель мощности, причем выход каждого предварительного усилителя через соответствующий фильтр низких частот соединен с первыми входами каждого сумматора, а также через последовательно соединенные соответствующий полосовой фильтр и демодулятор с вторыми входами тех же сумматоров, выходы сумматоров подключены к модулирующим входам модуляторов, соединенных основными входами с выходами генераторов несущих частот, а выходы модуляторов через усилители мощности подключены к входам соответствующих широкополосных излучателей, первый блок предварительной обработки сигналов дополнительно содержит фильтр низких частот, модулятор, генератор несущей частоты и усилитель мощности, причем выход предварительного усилителя через фильтр низких частот подключен к модулирующему входу модулятора, соединенного основным входом с выходом генератора несущей частоты, а выходом через усилитель мощности с входом первого широкополосного излучателя, последний блок предварительной обработки сигналов дополнительно содержит фильтр низких частот, полосовой фильтр и демодулятор, причем выход предварительного усилителя через фильтр низких частот подключен к первому входу сумматора, а также через последовательно соединенные полосовой фильтр и демодулятор к второму входу сумматора.
Кроме того, гидрофоны последовательности гидрофонов и излучатели последовательности излучателей могут быть установлены или вдоль двух параллельных прямых друг за другом или вдоль двух параллельных прямых, чередуясь друг с другом.
В первом случае во всех блоках предварительной обработки сигналов на выходе фильтра низких частот дополнительно устанавливают линию задержки.
Поставленная цель в системе питания электронной аппаратуры приемной гидроакустической антенны достигается тем, что в систему питания, содержащую двухпроводный кабель-шлейф, индуктивно связанный через обмотки индуктора с потребителями электроэнергии и подключенный к генератору высокочастотных колебаний, выполненному в виде последовательно соединенных автогенератора с управляемой частотой, управляемого аттенюатора и усилителя мощности с управляемым импульсным стабилизатором напряжения, а также дифференциальный усилитель, дополнительно выполнены четыре выпрямителя, два компаратора напряжений, источник опорного напряжения и делитель напряжения, а также дополнительный индуктор с тремя обмотками, индуктивно связанными с кабель-шлейфом, причем первая обмотка дополнительного индуктора соединена с входом первого выпрямителя, выход которого подключен к первому входу первого компаратора, соединенного вторым входом с выходом источника опорного напряжения, выход первого компаратора подключен к управляющему входу аттенюатора, вход второго выпрямителя соединен с выходом аттенюатора, а выход с первым входом второго компаратора, второй вход которого через делитель напряжения соединен с выходом импульсного стабилизатора, а выход с управляющим входом импульсного стабилизатора, вторая и третья обмотки дополнительного индуктора подключены соответственно через третий и четвертый выпрямители к входам дифференциального усилителя, выход которого соединен с управляющим входом автогенератора.
Кроме того, вторая и третья обмотки дополнительного индуктора соединены последовательно, а общая точка соединения обмоток подключена к корпусу системы.
Именно предложенная система питания позволяет реализовать предложенную приемную гидроакустическую антенну с лучевой диаграммой направленности, работающей в условиях изменений гидрофизических параметров натурного водоема. С другой стороны, если предложенная система питания будет отсутствовать в комплекте предложенной гидроакустической антенны, то практическая реализация последней не обеспечит достижения поставленной цели устранение влияния гидрофизических факторов на работу антенны, поскольку гидрофизические факторы натурного водоема будут оказывать влияние на работу антенны через систему ее питания. Это позволяет сделать вывод, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сравнение предложенных технических решений с их прототипами позволило установить соответствие их критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемые изобретения от прототипа, не были выявлены и потому они обеспечивают заявленным техническим решением соответствие критерию "изобретательский уровень".
Предложенные технические решения могут быть использованы в науке и технике, что обеспечивает соответствие их критерию "промышленная применимость".
На фиг. 1, 2 представлены схемы двух вариантов приемной гидроакустической антенны; на фиг. 3 электронно-функциональная схема антенны; на фиг. 4,5 временные диаграммы, поясняющие работу гидроакустической антенны; на фиг. 6 схема системы питания гидроакустической антенны.
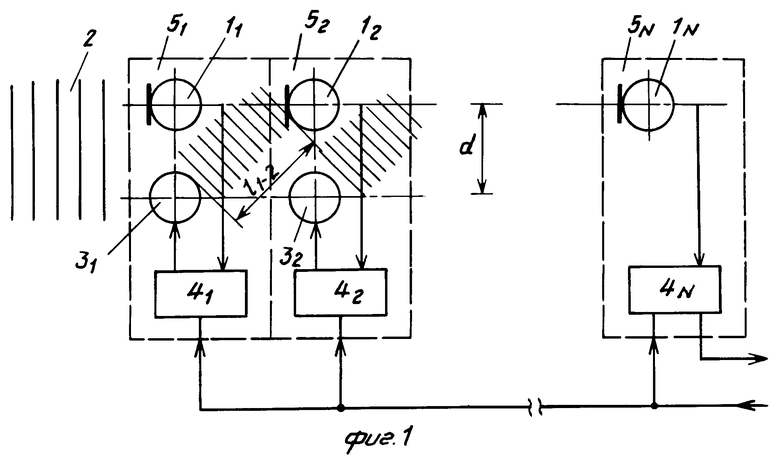
Приемная гидроакустическая антенна (ГА) содержит последовательность гидрофонов 11, 12,1N, расположенных с заданным шагом 1 в направлении приема гидроакустических сигналов 2, и систему формирования лучевой диаграммы направленности, выполненной в виде последовательности широкополосных гидроакустических излучателей 31,32,3N-1. Выходы гидрофонов 11,12,1N-1 и входы широкополосных излучателей 31,32,3N-1 подключены к блокам 41,42,4N предварительной обработки сигналов.
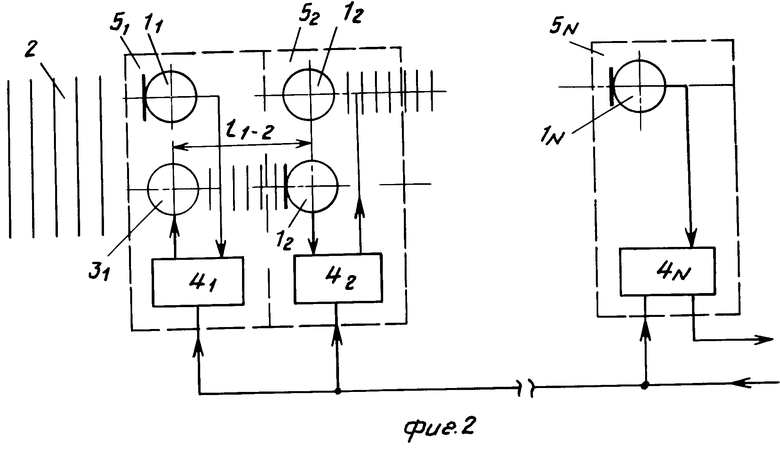
Излучатели 31,32,3N-1 и гидрофоны 11,12,1N могут быть расположены вдоль двух параллельных прямых (см.фиг.1) либо в шахматном порядке (см.фиг.2).
На практике расстояние l между соседними модулями 5 не менее нескольких метров, а диаметр элементов 1, 3 и расстояние между ними составляет сотые доли метра.
Элементы 1, 3, 4 образуют приемопередающие и обрабатывающие модули 51, 52, 5N. В каждом модуле 5 излучатель 3 акустически связан с гидрофоном 1 последующего соседнего модуля, а каждое устройство 4 предварительной обработки сигналов связано с системой питания электронной аппаратуры гидроакустической антенны (см.фиг.6).
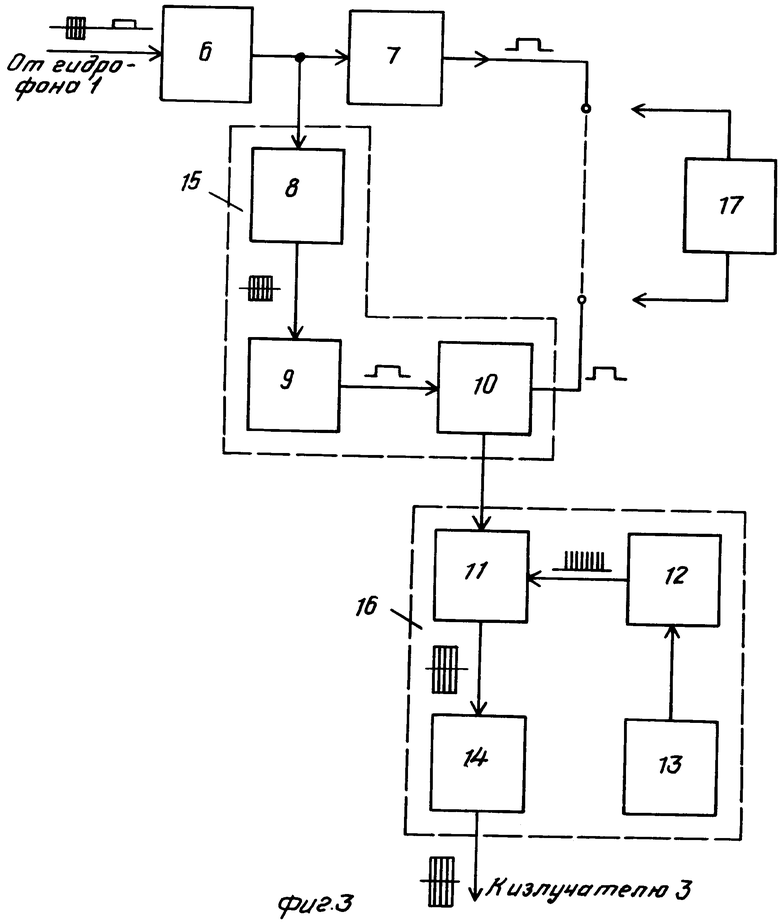
Каждое устройство 4 предварительной обработки информации содержит (см. фиг.3) предварительный усилитель 6, фильтр 7 низких частот, полосовой фильтр 8, демодулятор 9, сумматор 10, модулятор 11, генератор 12 несущих частот, переключатель 13 частоты генератора несущих частот и усилитель 14 мощности.
Выход предварительного усилителя 6 через фильтр 7 низких частот подключен к первому входу сумматора 10 и через последовательно соединенные полосовой фильтр 8 и демодулятор 9 к второму входу сумматора 10. Выход сумматора 10 подключен к регистратору (на чертеже не показан) и к модулирующему входу модулятора 11, основной вход которого соединен с генератором 12 несущих частот, задаваемых переключателем 13 частоты. Выход модулятора 11 подключен через усилитель 14 мощности к излучателю 3 (см.фиг.1 и 2).
Гидроакустическая антенна может включать в себя десятки, сотни и тысячи идентичных приемопередающих модулей 5, отличающихся только несущей частотой, задаваемой генераторами 12 и переключателями 13 и полосой пропускания полосовых фильтров 8. Только первый и последний модули 51 и 5N отличаются от остальных отсутствием демодулирующих и модулирующих блоков 15 или 16 соответственно (см.фиг.3).
В модули 5 вводится дополнительно линия небольшой временной задержки 17 (см.фиг.3), установленная между фильтром низких частот 7 и сумматором 10 (на фиг.3 линия задержки 17 вынесена за пределы схемы).
Приемная гидроакустическая антенна работает следующим образом.
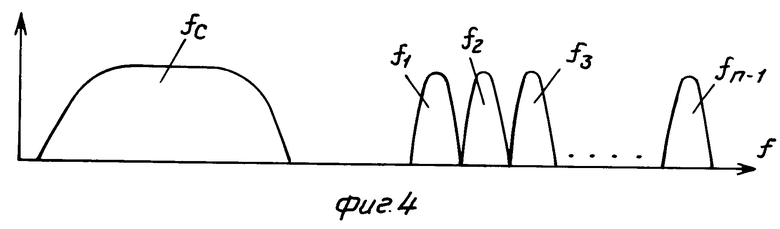
Гидроакустическая волна 2, распространяясь в водной среде достигает гидрофона 1 (см.фиг.1,2). Давление гидроакусти- ческой волны 2 вызывает появление на выходе гидрофона 1 электрического напряжения, пропорционально гидроакустическому давлению. Это напряжение усиливается предварительным усилителем 6 (см. фиг.3) устройства 41 предварительной обработки сигнала. Далее напряжение через фильтр 7 низких частот поступает на один из входов сумматора 10. С выхода сумматора 10 сигнал подается на модулирующий вход модулятора 11, на основной вход которого подается несущая частота f1 от генератора 12 несущей частоты (см.фиг.4). Частота f1 генератора 12 предварительно устанавливается переключателем 13 частоты и не совпадает со спектром исследуемого сигнала fc(см.фиг.4).
С выхода модулятора 11 напряжение поступает на усилитель 14 мощности, а затем на излучатель 31. Последний излучает в водную среду акустический сигнал, достигаемый через время t1-2 l1-2/C1-2 гидрофона l2, где l1-2 расстояние между первым излучателем 31 и вторым гидрофоном l2; С1-2 скорость звука в воде в акватории натурного водоема, в которой расположена данная часть антенны. Через это же время гидрофона l2 достигает гидроакустическая волна 2 (для случая, реализованного на фиг.2 и в п.4 формулы изобретения, а также для случая, когда расстояние l1-2 достаточно велико по сравнению с расстоянием d между последовательностями гидрофонов 1 и излучателями 3).
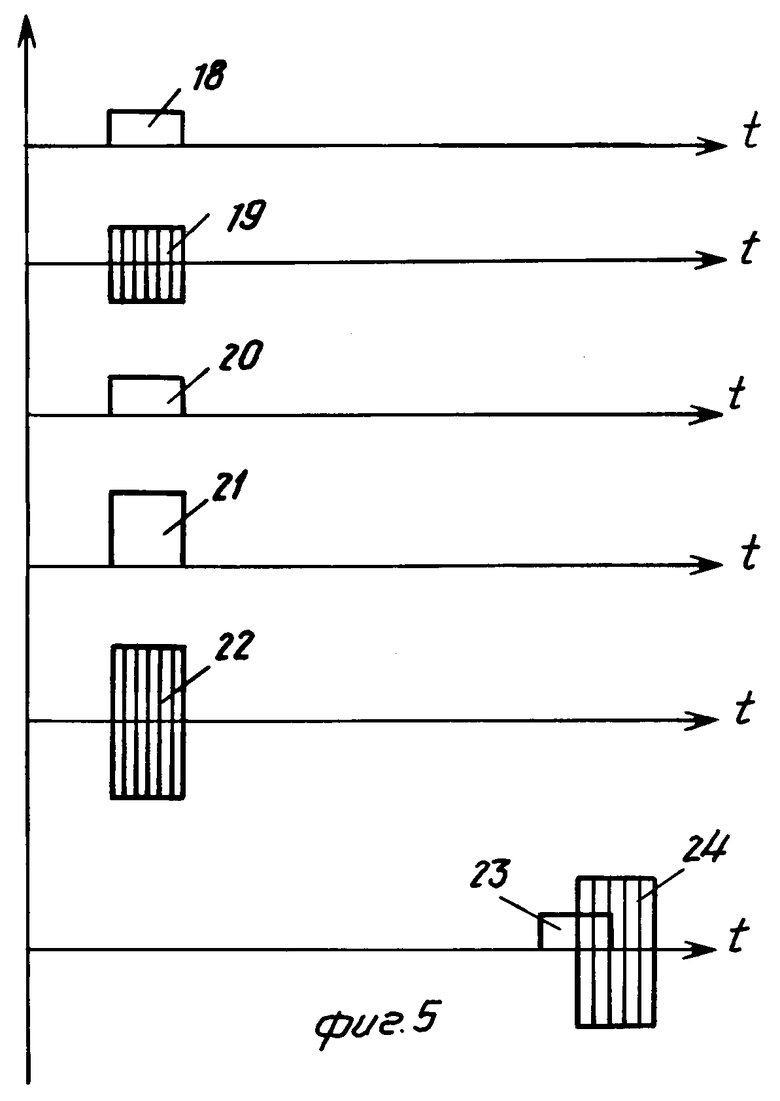
Эти сигналы усиливаются предварительным усилителем 6 второго модуля 52 при этом фильтр 7 низких частот выделяет сигнал 18 (см.фиг.5), а полосовой фильтр 8 сигнал 19 на несущей частоте f1. Демодулятор 9 выделяет огибающую несущую частоты, направляя продетектированный сигнал 20 (см.фиг.5) на вход сумматора 10, на другой вход которого в это же время поступает сигнал 18 акустической волной 2 на гидрофоне l2следующего модуля 42.
Суммарный сигнал 21 направляется на модулятор 11 для модуляции несущей частоты f2 (см.фиг.4), не совпадающей с частотами fс и f1. Далее весь процесс работы антенны повторяется на частоте f2 с сигналом 22 (см.фиг.5).
Для случая, когда расстояние l сравнимо с d (см.фиг.1), сигнал 23 от акустической волны 2 и сигнал 24 на несущей частоте несколько не будут совпадать во времени из-за различия проходимого акустическими волнами пути. В этом случае с помощью линии задержки 17 (см.фиг.3) сигнал 23 задерживают на это небольшое время tз (см.фиг.5).
Таким образом, на выходе гидроакустической антенны в направлении прихода волны 2 будет зарегистрирован в N раз больший полезный сигнал по сравнению с сигналом на выходе одного гидрофона. При этом время задержки сигналов автоматически поддерживается оптимальным для работы антенны независимо от скорости звука в среде.
Питание ГА, а также съем информации с отдельных гидрофонов осуществляется с помощью системы питания (или съема информации) с индуктивной связью (см.фиг.6), также следящей за изменением гидрофизических параметров среды.
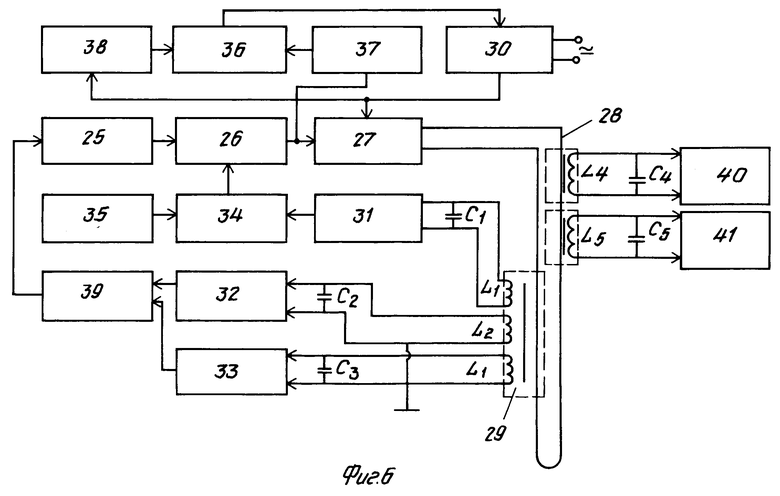
Система содержит соединенные последовательно автогенератор 25 с управляемой напряжением частотой, аттенюатор 26 и усилитель мощности 27, нагруженный на двухпроводный кабель-шлейф 28. С кабелем-шлейфом индуктивно связан дополнительный индуктор 29 с тремя обмотками L1, L2, L3, зашунтированными соответственно конденсаторами С1, С2, С3. Питание усилителя мощности 27 осуществляется от регулируемого напряжением импульсного стабилизатора 30. Обмотки индуктора 29 соединены с нестабилизированными выпрямителями 31, 32, 33.
Имеется также компаратор 34, первый вход которого соединен с выходом источника 35 опорного напряжения, второй с выходом выпрямителя 31, а выход с управляющим входом аттенюатора 26, а также компаратор 36, первый вход которого подключен к выпрямителю 37, второй к делителю напряжения 38, а выход к управляемому входу импульсного стабилизатора 30.
Система содержит также дифференциальный усилитель 39, входы которого соединены с выходами выпрямителей 32, 33.
Соединения остальных блоков показаны на фиг. 6.
Вторая и третья обмотки L2 и L3 дополнительного индуктора соединены последовательно, а общая точка соединения подключена к корпусу системы, как показано на схеме (см. фиг.6). На фиг.6 показаны также потребители 40, 41 (гидрофоны, излучатели и т. п.), питание которых производится от кабель-шлейфа 28 с помощью индуктивно связанных с ним индукторов с обмотками L4, L5 и конденсаторами С4, С5.
Система работает следующим образом.
Колебания автогенератора 25, имеющие частоту f0, через аттенюатор 26 подаются на усилитель мощности 27 и после усиления на двухпроводный кабель-шлейф 28. Ток, протекающий по кабель-шлейфу, индуцирует в обмотках L1, L2, L3 дополнительного индуктора 29 и в обмотках индукторов L4, L5 потребителей 40, 41 напряжения. Обмотка L1 с конденсатором С1, а также обмотки индукторов потребителей 40 и 41 с конденсаторами С4 и С5 настроены в резонанс на частоту задающего генератора 25, т.е. f0 1/2  . Напряжение с обмотки L1 выпрямляется первым выпрямителем 31 и подается на первый вход первого компаратора 34. На второй вход компаратора 34 от источника 35 подается постоянное опорное напряжение U0. При равенстве напряжений на обоих входах компаратора 34 управляющее напряжение на его выходе отсутствует, при этом управляемый аттенюатор 26 имеет среднее затухание.
. Напряжение с обмотки L1 выпрямляется первым выпрямителем 31 и подается на первый вход первого компаратора 34. На второй вход компаратора 34 от источника 35 подается постоянное опорное напряжение U0. При равенстве напряжений на обоих входах компаратора 34 управляющее напряжение на его выходе отсутствует, при этом управляемый аттенюатор 26 имеет среднее затухание.
Если под действием указанных дестабилизирующих факторов напряжение на обмотке L1, а следовательно, и на первом входе компаратора 34 станет меньше опорного напряжения, то на выходе компаратора 34 появится напряжение, которое уменьшит затухание аттенюатора 26. Напряжение на входе усилителя мощности 27 и напряжение и ток кабеля-шлейфа 38 увеличатся, что приведет к увеличению напряжения на обмотке L1 индуктора 29 и напряжения на первом входе компаратора 34 до тех пор, пока оно не станет равным напряжению на втором входе компаратора 34. Если под действием дестабилизирующих факторов напряжение на обмотке L1, а следовательно, и на первом входе компаратора 34 увеличится и станет больше опорного напряжения, то на выходе компаратора 34 появится управляющее напряжение, которое увеличит затухание аттенюатора 26. Напряжение на входе усилителя мощности 27 уменьшится, ток в кабель-шлейфе 28 уменьшится, что приведет к уменьшению напряжения на обмотке L1 индуктора 29 и к уменьшению напряжения на первом входе компаратора 34 до тех пор, пока оно не станет равным напряжению на втором входе компаратора 34. Таким образом, напряжение на обмотке L1будет всегда оставаться постоянным, а выпрямленное значение его и с наперед заданной точностью будет равно Uо. Поскольку обмотки и сердечники индукторов питания и выпрямители потребителей полностью идентичны обмотке L1 и сердечнику дополнительного индуктора, находятся в идентичных условиях, имеют одинаковую связь с кабель-шлейфом, то напряжение питания потребителей будет также стабильно и близко к Uо.
В случае, когда под действием внешних дестабилизирующих факторов из-за изменений ферромагнитных свойств индукторов изменяется резонансная частота их обмоток и становится отличной от частоты колебаний задающего генератора fo 1/2 , то напряжение на обмотке L1 также уменьшится, что приведет к описанному выше процессу увеличения тока в кабель-шлейф. Однако при этом были бы большие потери мощности, что привело бы к уменьшению КПД. Для устранения частотной расстройки служат две обмотки L2 и L3 дополнительного индуктора 5, с помощью конденсаторов С2 и С3резонансная частота контура L2C2 сделана несколько выше, а контура L3C3несколько ниже резонансной частоты контура L1C1. Поэтому контуры L2C2 и L3C3 образуют частотный дискриминатор. Если на индуктор 20 воздействует поле кабель-шлейфа, имеющее частоту fo 1/2
, то напряжение на обмотке L1 также уменьшится, что приведет к описанному выше процессу увеличения тока в кабель-шлейф. Однако при этом были бы большие потери мощности, что привело бы к уменьшению КПД. Для устранения частотной расстройки служат две обмотки L2 и L3 дополнительного индуктора 5, с помощью конденсаторов С2 и С3резонансная частота контура L2C2 сделана несколько выше, а контура L3C3несколько ниже резонансной частоты контура L1C1. Поэтому контуры L2C2 и L3C3 образуют частотный дискриминатор. Если на индуктор 20 воздействует поле кабель-шлейфа, имеющее частоту fo 1/2 то напряжения на выходах выпрямителей 32 и 33 одинаковы и противоположны по знаку, а следовательно, управляющее разностное напряжение на выходе дифференциального усилителя равно нулю.
то напряжения на выходах выпрямителей 32 и 33 одинаковы и противоположны по знаку, а следовательно, управляющее разностное напряжение на выходе дифференциального усилителя равно нулю.
Если под действием внешних дестабилизирующих факторов уменьшатся или увеличатся индуктивности обмоток L1, L2, L3, то на контуре L2C2напряжение не будет равно напряжению на контуре L3C3, а на выходе дифференциального усилителя 39 появится резонансное напряжение, которое, воздействия на автогенератор 25, заставит частоту его измениться так, чтобы она стала равной частоте контура L1C1. Поскольку обмотки индукторов питания потребителей настроены на одну частоту fo 1/2 , то частота колебаний задающего генератора будет всегда равна резонансной частоте индукторов питания потребителей.
, то частота колебаний задающего генератора будет всегда равна резонансной частоте индукторов питания потребителей.
Таким образом, с помощью петли с обмотками L2 и L3 дополнительного индуктора 29 удается избежать уменьшения КПД устройства питания из-за ухода резонансной частоты индукторов питания.
Дальнейшего увеличения КПД и оптимизации режима работы усилителя мощности позволяет добиться следующая цепь. Напряжение, действующее на выходе аттенюатора 26, выпрямляется выпрямителем 37 и подается на первый вход второго компаратора 36. На второй вход компаратора 36 через делитель напряжения 38 подается постоянное напряжение питания наиболее энергоемкой части устройства-усилителя мощности 27. Если напряжение на обоих входах компаратора 36 равны, то на выходе компаратора 36 напряжение равно нулю и импульсный стабилизатор 28 подает напряжение питания на усилитель мощности равное Ео. Если переменное напряжение на входе усилителя мощности 27 уменьшиться, то уменьшиться напряжение на входе компаратора 36, что приведет к изменению напряжения на выходе компаратора и на управляющем входе импульсного стабилизатора 30. Напряжение на выходе импульсного стабилизатора 30 также уменьшится. Таким же образом увеличение переменного напряжения на выходе аттенюатора 26 приведет к увеличению напряжения питания усилителя мощности 27. Поэтому коэффициент использования напряжения источника питания усилителем мощности 27 будет оставаться постоянным, что приведет к возрастанию КПД всего устройства. Питание импульсного стабилизатора 30 производится от первичного источника питания выпрямителя.
Таким образом, предложенные гидроакустическая антенна и система ее питания "отслеживают" изменения гидрофизических параметров натурного водоема, автоматически корректируя свои параметры в требуемых пределах в соответствии с этими изменениями.
При этом в ГА время задержки сигналов автоматически изменяется с изменением скорости звука в среде, и также "следит" за случайными отклонениями расстояний между гидрофонами. Легко получаются большие времена задержки в отличие от прототипа ГА.
Предложенная система питания ГА, кроме того, не требует подстройки при проведении пуско-наладочных работ на месте использования при изменении внешних условий среды (вода, воздух) и при изменении количества потребителей.
Система питания обеспечивает оптимальные условия передачи мощности от первичного источника питания к потребителю при неизменно высоком значении КПД.
Использование: в гидроакустике. Сущность изобретения: последовательность (цепочка) гидрофонов в линейной гидроакустической антенне (ГА) дополняется последовательностью (цепочкой) гидроакустических излучателей, расположенных с тем же шагом, что и гидрофоны. Акустическая волна с определенного направления последовательно во времени воздействует на все гидрофоны цепочки. Принятые сигналы с выходов гидрофонов от первого до предпоследнего переизлучают на своей несущей частоте. Для этого ГА снабжена специальными блоками предварительной обработки сигналов. Это позволяет просуммировать все сигналы с отдельных гидрофонов ГА в одно и то же время и на одной частоте независимо от величины скорости звука в натурном водоеме. Отследить изменения гидрофизических параметров водоема предназначена система питания электронных блоков ГА, служащих для бесконтактной передачи электрической энергии на индукторы питания всех электрических блоков ГА. Система питания содержит кабель-шлейф, подключенный к генератору и усилителю мощности, дополнительный трехобмоточный индикатор, две обмотки которого, зашунтированные конденсаторами, образуют частотный дискриминатор, подстраивающий частоту генератора в резонанс с индукторами питания потребителей. Сигнал с третьей обмотки поступает на входы, управляющие выходным напряжением генератора импульсного стабилизатора, питающего усилитель мощности, поддерживая ток в кабель-шлейфе таким, что напряжение на индукторе питания потребителей остается постоянным при неизменном КПД независимо от изменения внешних условий, величины нагрузки и других дестабилизирующих факторов. 2 с. и 4 з.п. ф-лы, 6 ил.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| С.Д | |||
| Амранин и др | |||
| Информационно-измерительные системы с частотным развертывающим преобразованием | |||
| Сер | |||
| Библиотека по автоматике, вып | |||
| ПРИБОР ДЛЯ ОТОПЛЕНИЯ НЕФТЬЮ | 1923 |
|
SU641A1 |
| М | |||
| : Энергоатомиздат, 1983, с.21-24, 81-83, с.61. | |||
