Изобретение относится к подъемно-транспортным машинам и может быть использовано для управления шахтной подъемной установкой с приводом от асинхронного двигателя.
Известно устройство для управления шахтной подъемной машиной, содержащее панели управления, источники питания и другие типовые блоки, обеспечивающие формирование заданных тахограмм работы подъемных установок в соответствии с требованиями Правил безопасности.
Однако, это устройство не обеспечивает формирование режимов внепикового электропотребления подъемных установок с учетом ограничения нагрузки, вводимых энергоснабжающими организациями.
Наиболее эффективным является устройство для управления шахтной подъемной машиной содержащее пусковой блок с контакторами, соединенный выходами соответственно с цепями блокировок привода подъемной машины, блоком выбора направления и исполнительными механизмами предохранительного и рабочего торможения, блок измерения скорости вращения подъемной машины, соединенный с входом пускового блока, датчики положения сосуда в стволе и блок формирования сигнала временной блокировки пуска, выход которого соединен со вторым входом пускового блока, а выходы - с блоком измерения скорости вращения подъемной машины и датчиками положения сосуда в стволе и контроля загрузки промежуточных бункеров, загружаемых подъемной машиной.
Недостатком известного устройства является то, что оно при формировании внепикового электропотребления, т. е. в период максимума и междупиковые периоды, не позволяют регулировать нагрузки на валу подъемной машины как при работе ее вхолостую, так и при подъеме груза с различных горизонтов шахты. В свою очередь, указанные выше обстоятельства не дают возможность экономично управлять шахтной подъемной машиной.
Целью изобретения является повышение экономичности, за счет регулирования нагрузки подъемной установки в период максимума и междупиковые периоды.
Указанная цель достигается тем, что в известном устройстве, содержащем пусковой блок, первый выход которого соединен с приводом подъемной машины непосредственно, а второй - через блок выбора направления движения, третий и четвертый выходы пускового блока соединены соответственно с предохранительным и рабочим тормозами подъемной машины, блок измерения скорости вращения подъемной машины, выход которого соединен с одним входом пускового блока и через блок формирования сигнала временной блокировки пуска с другим его входом, датчики положения сосуда в стволе и датчики контроля загрузки промежуточных бункеров, подключенные к соответствующим входам блока формирования временной блокировки пуска, с целью повышения экономичности за счет регулирования нагрузки подъемной машины в период максимума и междупиковые периоды, используют датчик контроля загрузки сосуда и блок регулирования привода подъемной машины, включающий анализатор скорости, элемент ИЛИ-НЕ, элемент И, функциональный преобразователь и регулятор напряжения, причем, анализатор скорости и элемент ИЛИ-НЕ подключены к соответствующим входам элемента И, выход которого подключен к первому входу функционального преобразователя, выход которого соединен с регулятором напряжения, выход которого является выходом блока регулирования привода подъемной машины, первым, вторым и третьим входами которого являются соответственно, входы анализатора скорости, элемента ИЛИ-НЕ и второй вход функционального преобразователя, при этом, выходы блока измерения скорости вращения подъемной машины датчиков положения сосуда в стволе с датчика контроля загрузки сосуда подключены соответственно, к первому, второму и третьему входам блока регулирования привода подъемной машины, выход которого соединен с приводом подъемной машины.
Введение блока регулирования привода в устройство для управления шахтной подъемной машиной обусловлено тем, что при формировании внепикового электропотребления подъемной установки формируется реактивная мощность двигателя в зависимости от нагрузки на валу в периоды междупикового электропотребления, обеспечивающая эффективные значения КПД и коэффициент мощности двигателя. Регулирование напряжения на зажимах двигателя подъемной машины подчиняется известному закону теории электрических машин (см. Сыромятников И. А. Режимы работы асинхронных и синхронных двигателей. М. : Энергоатомиздат, 1984, с. 240).
KU= K
 , (1) где KU = U/Uном - относительное значение напряжения на зажимах двигателя;
, (1) где KU = U/Uном - относительное значение напряжения на зажимах двигателя;
Kf = f/fном - относительное значение частоты питающей сети;
Mc* = M/Mc - относительное значение момента сопротивления нагрузки;
Il2ном- номинальное значение приведенного тока ротора, А;
Ioном - номинальное значение намагничивающего тока, А;
bном - кратность max момента.
При регулировании напряжения целесообразно поддерживать частоту сети неизменной, т. е. Kf = 1. Тогда выражение (1) упрощается.
KU= a , где a=
, где a=  .
.
Предлагаемое решение представлено в виде функциональной блок-схемы. В качестве датчика контроля загрузки сосуда может быть использован бесконтактный магнитоупругий датчик крутящего момента типа МИМ, измеряющий момент на валу и устанавливаемый на одном из участков кинематической цепи привода подъемной машины.
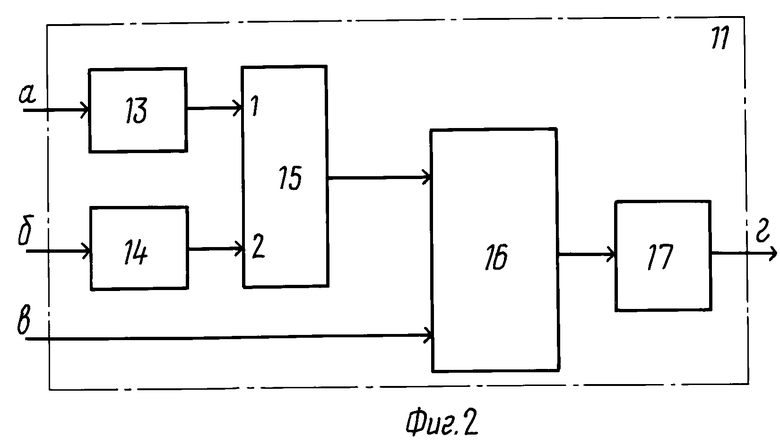
На фиг. 1 приведена функциональная блок-схема устройства; на фиг. 2 - функциональная схема блока регулирования привода подъемной машины.
Устройство содержит пусковой блок 1 с контакторами (не показано), соединенный с цепями блокировок привода 2 подъемной машины 3, с блоком 4 выбора направления движения и исполнительными механизмами предохранительного 5 и рабочего 6 торможения, блок 7 измерения скорости вращения подъемной машины 3, соединенный со входом пускового блока 1, датчики 8 положения сосуда в стволе, блок 9 формирования сигнала временной блокировки пуска, выход которого соединен с пусковым блоком 1, а входы - с блоком 7 измерения скорости вращения подъемной машины 3, с датчиками 10 контроля загрузки промежуточных бункеров и блок 11 регулирования привода 2 подъемной машины, выход которого соединен с приводом 2 подъемной машины, а входы - с блоком 7 измерения скорости вращения подъемной машины, с датчиками 8 положения сосуда в стволе и датчиком 12 загрузки сосуда.
Блок 11 регулирования привода подъемной машины включает в себя анализатор 13 скорости и элемент ИЛИ-НЕ 14, выходы которых подключены к элементу И 15, выход которого соединен с первым входом функционального преобразователя 16, второй вход которого соединен с датчиком 12 контроля загрузки сосуда, а выход соединен с регулятором 17 напряжения на зажимах асинхронного двигателя привода 2 подъемной машины.
Устройство работает следующим образом.
Команда на начало движения поступает из пускового блока 1 в блок 4 выбора направления движения и в цепи управления привода 2 подъемной машины. Затем по команде пускового блока 1 происходит растормаживание подъемной машины 3 механизмами предохранительного 5 и рабочего 6 торможения, подъемная машина 3 приходит в движение и осуществляется подъемный цикл по заданной тахограмме: ускорение, движение с равномерной скоростью, замедление и остановка подъемного сосуда в стволе на заданной отметке. Параметры тахограммы контролируются блоком 7 измерения скорости вращения подъемной машины.
По окончанию цикла подъема подъемная машина 3 затормаживается с помощью механизма рабочего тормоза 6. В случае срабатывания любой из блокировок в цепи управления привода 2 подъемной машины, механизм предохранительного тормоза 5 производит аварийную остановку подъемной машины 3.
В период максимума электроэнергетической системы при условиях отсутствия напряжения с блока 7 (подъемная машина заторможена), замкнутых датчиках 8 контроля положения сосуда в стволе и при замкнутых датчиках 10 контроля загрузки промежуточных бункеров, сигнализирующих о наличии свободной вместимости бункеров, срабатывает блок 9 формирования сигнала временной блокировки пуска и происходит блокировка пуска подъемной машины 3 на период максимума электроэнергетической системы.
При изменении технологической ситуации или при возникновении необходимости пуска подъемной машины в период максимума, например, для планового осмотра подъемной установки, предусмотрена возможность исключения блока 9 из работы с помощью встроенного в него переключателя (не показано).
Когда появляется необходимость осуществить определенное количество подъемных циклов для предотвращения перепол- нения подъемных бункеров, работает блок 11 регулирования привода подъемной машины.
При движении с равномерной скоростью срабатывает анализатор скорости 13 и при разомкнутом одном из датчиков 8 контроля положения сосуда в стволе на выходе элемента И 15 появляется сигнал, разрешающий работу функционального преобразователя 16, который, при наличии информации о степени нагрузки подъемной машины от датчика 12 контроля загрузки сосуда, вырабатывает управляющее воздействие на регулятор 17 напряжения, изменяющий напряжение на зажимах двигателя привода подъемной машины.
Предлагаемое устройство в сравнении с прототипом более экономично за счет возможности регулирования нагрузки подъемной установки в период максимума и междупиковые периоды на 20-25% . (56) Авторское свидетельство СССР N 1191403, кл. B 66 B 1/28, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления шахтной подъемной машиной | 1982 |
|
SU1191403A1 |
| Система управления вентиляционной установкой | 1986 |
|
SU1318725A1 |
| Устройство для контроля натяжения каната шахтной подъемной установки | 1986 |
|
SU1342856A1 |
| Предохранительный полок | 1986 |
|
SU1320425A1 |
| Устройство определения параметров движения шахтных подъемных машин при аварийном торможении | 1990 |
|
SU1754612A1 |
| Способ регулирования режима работы комплекса дробления и устройство для его осуществления | 1988 |
|
SU1570772A1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| Способ выбора режима электропотребления | 1989 |
|
SU1659877A1 |
| Устройство регулирования процесса предохранительного торможения шахтной многоканатной подъемной машины | 1986 |
|
SU1442493A1 |
| Способ оптимизации процесса бурения | 1990 |
|
SU1795220A1 |
Сущность изобретения: устройство содержит пусковой блок 1, привод подъемной машины 2, подъемная машина 3, блок выбора направления движения 4, предохранительный тормоз 5, рабочий тормоз 6, блок измерения скорости вращения подъемной машины 7, датчики положения сосуда в стволе 8, блок формирования временной блокировки пуска 9, датчик контроля загрузки промежуточных бункеров 10, блок регулирования привода подъемной машины 11, датчик контроля загрузки сосуда 12. 1-2-3-7-11-2, 1-4-2, 7-1-6-3, 7-9-1-5-3, 8-9, 10-9, 8-11, 12-11. 2 ил.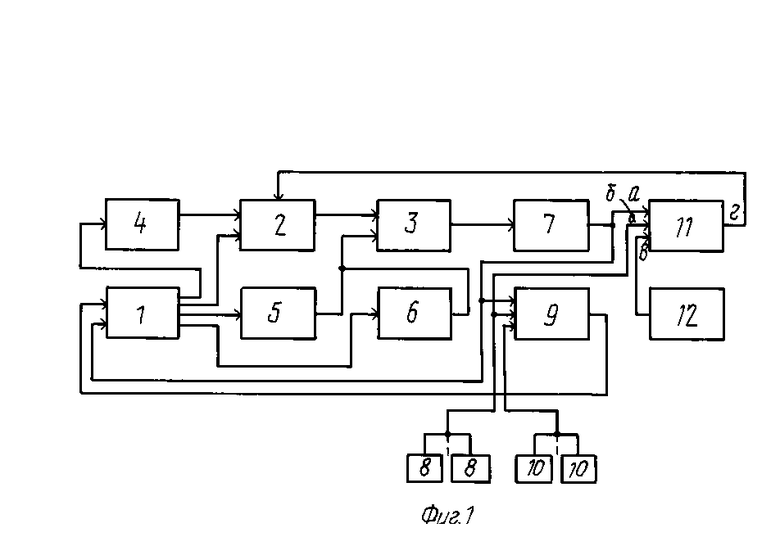
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ, содержащее пусковой блок, первый выход которого соединен с приводом подъемной машины непосредственно, а второй - через блок выбора направления движения, третий и четвертый выходы пускового блока соединены соответственно с предохранительным и рабочим тормозами подъемной машины, блок измерения частоты вращения подъемной машины, выход которого соединен с одним входом пускового блока и через блок формирования сигнала временной блокировки пуска с другим его входом, датчики положения сосуда в стволе и датчики контроля загрузки промежуточных бункеров, подключенные к соответствующим входам блока формирования временной блокировки пуска, отличающееся тем, что, с целью повышения экономичности путем регулирования нагрузки подъемной машины в период максимума и межтупиковые периоды, оно снабжено датчиком контроля загрузки сосуда и блоком регулирования привода подъемной машины, включающим анализатор скорости, элемент ИЛИ - НЕ, элемент И, функциональный преобразователь и регулятор напряжения, причем анализатор скорости и элемент ИЛИ - НЕ подключены к соответствующим входам элемента И, выход которого подключен к первому входу функционального преобразователя, выход которого соединен с регулятором напряжения, выход которого является выходом блока регулирования привода подъемной машины, первым, вторым и третьим входами которого являются соответственно входы анализатора скорости, элемента ИЛИ - НЕ и второй вход функционального преобразователя, при этом выходы блока измерения частоты вращения подъемной машины датчиков положения сосуда в стволе с датчика контроля загрузки сосуда подключены соответственно к первому, второму и третьему входам блока регулирования привода подъемной машины, выход которого соединен с приводом подъемной машины.
