Изобретение относится к автоматизации подъемно-транспортных механизмов , а именно к способам управления процессом предохранительного торможе ния шахтных подъемных машин со шкивами трения.
Известен способ управления тормозными режимами подъемных машин, по которому эталонные значения тормозного усилия и замедления формируются |Q в зависимости от нагрузки на валу подъемной машины, направления движения и местоположения груза, скорости и причины включения тормоза. В процессе торможения определяют величину, разностного сигнала между эталонным и фактическго замедлением, который подают на изменение тормозного усилия, тем самым обеспечивая снижение динамических нагрузок на элементь тп подъемной машины llij . Однако такой способ не позволяет затормозить многоканатную подъемную , установку со шкивом трения на минимально возможном тормозном пути.- 25
Наиболее близким к изобретению техническим решением является способ регулирования процесса предохранительного торможения шахтной подъемкой машины, заключающийся в определении направления движения подъем- ных сосудов, определении статической разности натяжений опускающейся и поднимающейся ветвей головных канатов и регулировании тормозного усилия 2. 35
Недостатком известного способа является то что он не обеспечивает на многоканатнь{х подъемных установках надежного предохранительного торможения,
Цель изобретения - повьш1ение надежности предохранительного торможения .
Цель достигается тем, что согласно способу регулирования процесса предохранительного торможения шахтнс подъемной машины, заключающемуся в определении направления движения подъемных сосудов, определении статической разности натяжений опускаю- 50 |ейся и поднимающейся ветвей головlaix канатов и регулировании тормозного усилия, определяют критическую разность иатяжения опускающейся и поднимающейся ветвей головных 1 :ана- 55 тов, определяют фактическую разность натяжений в процессе предохранительного торможения, сравнивают -их и по
величине рассогласования регулируют тормозное усилие.
Благодаря этому разность натяжений головньге канатов стабилизируется на критическом уровне, что обеспечивает минимально возможный путь предохранительного торможейия, тем самым повьш1ается безопасность эксплуатации подъемных установок.
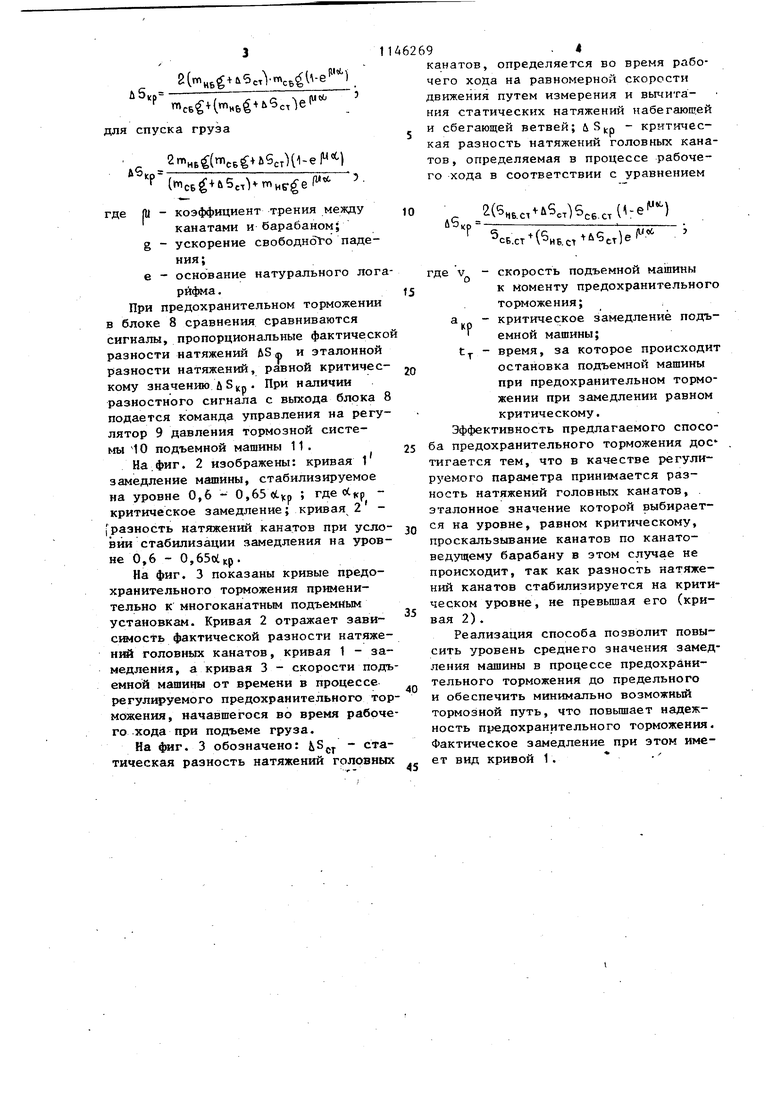
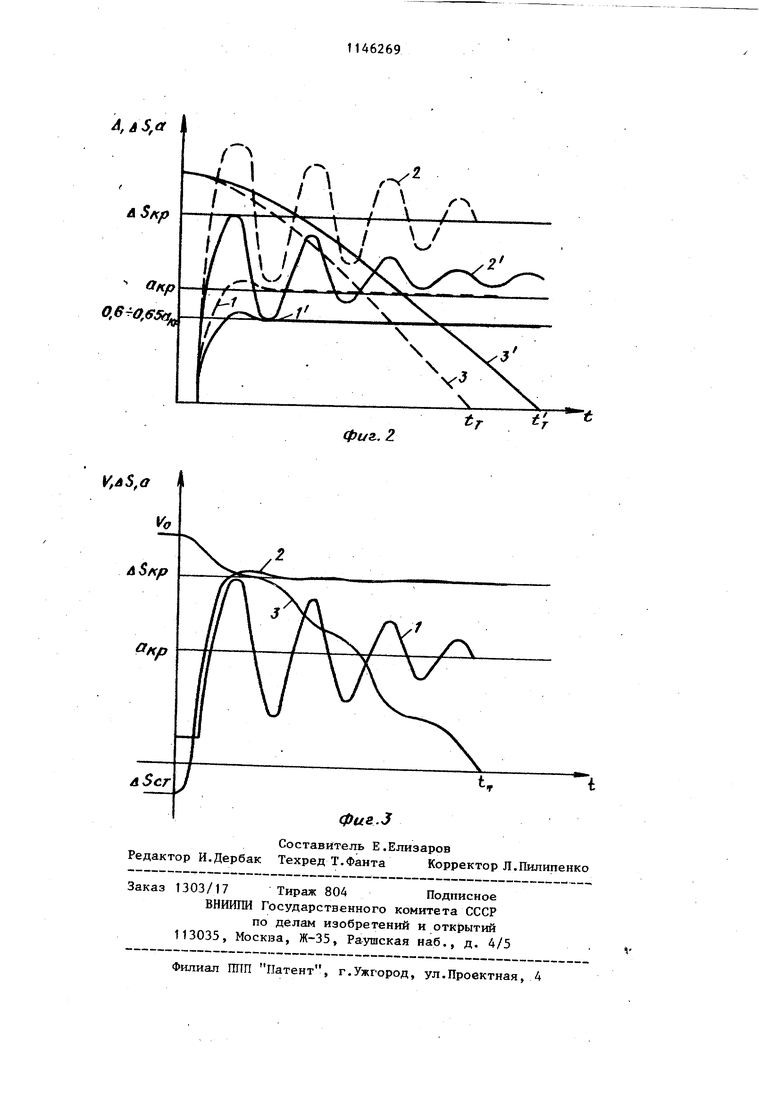
На фиг. 1 приведена функциональная схема устройства для реализации способа; на фиг. 2 и 3 - зависимости измерения разности натяжений головны канатов, замедления и скорости подъемной машины во времени в процессе регулируемого предохранительного торможения при реализации предлагаемого способа.
Способ реализзпот Следующим образо
В процессе рабочего года подъемной установки с помощью комплекта датчиков усилий в канатах 1 и 2 и ускорения 3 (фиг. 1) непрерывно измеряют натяжения сбегающей и набегающей ветвей головных канатов, ускорение и замедление машины. Сигналы, пропорциональные натяжениям i канатов, подаются на вход суммирующего блока 4, на выходе которого формируется сигнал, пропорциональный фактической разИости натяжений набегающей И сбегакядей S. ветвей головных канатов:
iSq) .
На вход масштабирующего блока 5 подается сигнал с датчика 3 замедления машины, на выходе блока 5 выделяется сигнал, пропорциональный динамической составляющей ь разности натяжений ветвей головных канатов
(т„5+тер), . где йб - угол обхвата канатами барабана;
массы набегающей и сбёганицей ветвей головных канатов.
Сигналы, пропорциональные дЗт и , подаются на входы суммирующего блока 6, на выходе которого вьщеляется статическая составляющая & Sj. разности натяжений в соответствии с выражением
А3„ .
По полученной статической разност с помощью функционального преобразователя 7 фо1 1ируется критическое значение разности натяженш1 канатов bS,в соответствии с выражениями: для подъема груза 2Ц„,..5..г.,,). Р Шев Ч-нбй сПе . для спуска груза 2п нБ€КБ +й5стК1-е1 Я где Ш - коэффициент трения между канатами и барабаном; g - ускорение свободн(эГо падения;е - основание натурального лога рифма , При предохранительном торможении в блоке 8 сравнения сравниваются сигналы, пропорциональные фактическ разности натяжений US ,р и эталонной разности натяжений, равной критичес кому значению uSup. При наличии разностного сигнала с выхода блока подается команда управления на регу лятор 9 давления тормозной системы 10 подъемной машины 11. На фиг. 2 изображены: кривая 1 замедление машины, стабилизируемое на уровне 0,6 - 0,65«(.р ; где о(.р критическое замедление; кривая 2 разность натяжений канатов при усло вии стабилизации замедления на уров не 0,6 - 0,. На фиг. 3 показаны кривые предохранительного торможения применительно к многоканатным подъемным установкам. Кривая 2 отражает зависимость фактической разности натяже ний головных канатов, кривая 1 - за медления, а кривая 3 - скорости под емной машины от времени в процессе регулируемого предохранительного то можения, начавшегося во время рабоч го хода при подъеме груза На фиг. 3 обозначено: S тическая разность натяжений головны 1 - ста анатов, определяется во время рабоего хода на равномерной скорости вижения путем измерения и вычитаия статических натяжений набегающей сбегающей ветвей; - критичесая разность натяжений головных канаов , определяемая в процессе рабочео хода в соответствии с уравнением .2(в,,,,.й9,,)5,е.ст() (5иБ., СБ.СТ - скорость подъемной машины к моменту предохранительного торможения; критическое замедление подъемной машины; время, за которое происходит остановка подъемной машины при предохранительном торможении при замедлении равном критическому. Эффективность предлагаемого способа предохранительного торможения достигается тем, что в качестве регулируемого параметра принимается разность натяжений головных канатов, эталонное значение которой выбирается на уровне, равном критическому, проскальзывание канатов по канатоведущему барабану в этом случае не происходит, так как разность натяжений канатов стабилизируется на критическом уровне, не превышая его (кривая 2) . Реализация способа позволит повысить уровень среднего значения замедления машины в процессе предохранительного торможения до предельного и обеспечить минимально возможный тормозной путь, что повьш1ает надежность предохранительного торможения. Фактическое замедление при этом имеет вид кривой 1.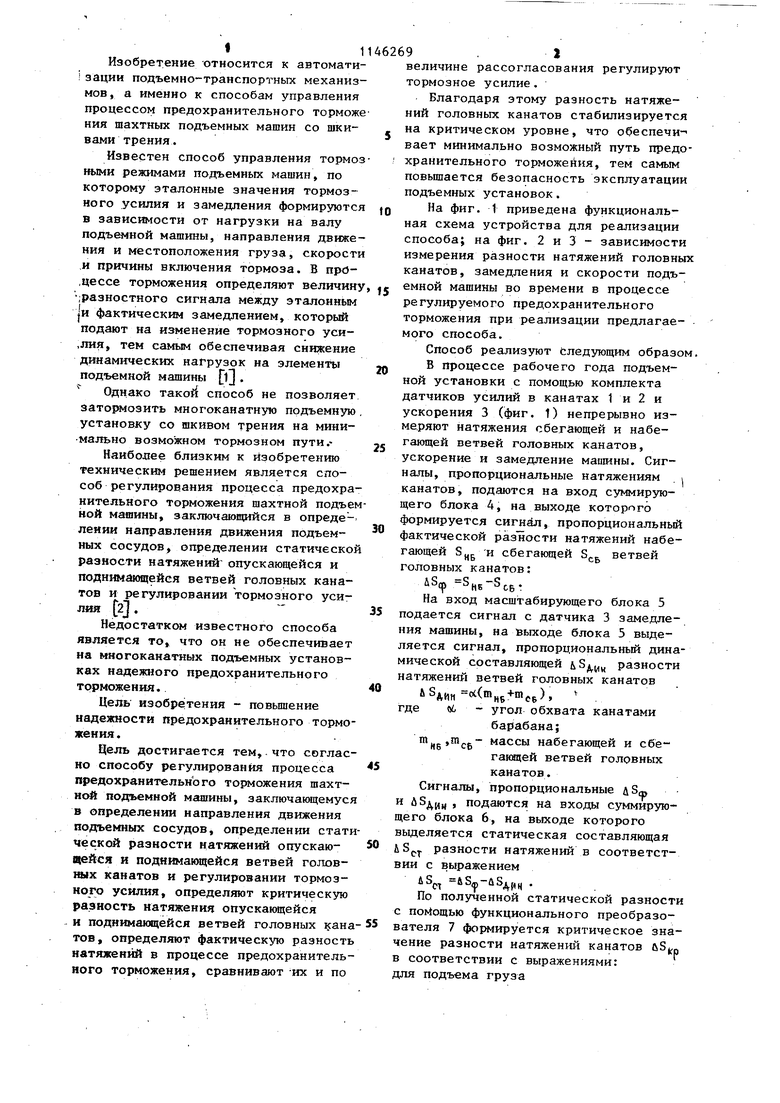
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования процесса предохранительного торможения шахтной многоканатной подъемной машины | 1986 |
|
SU1442493A1 |
| Способ определения коэффициента запаса тормозного момента подъемной машины | 1980 |
|
SU998284A1 |
| Способ определения тормозного усилия подъемной установки | 1987 |
|
SU1518261A1 |
| Способ предохранительного торможения шахтной подъемной установки со шкивами трения | 1977 |
|
SU638529A1 |
| Способ наладки и контроля параметров фрикционной рудничной подъемной установки | 1978 |
|
SU943163A1 |
| Способ защиты шахтной подъемной установки от напуска каната | 1987 |
|
SU1572967A1 |
| Устройство для предотвращения проскаль-зыВАНия KAHATA шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827368A1 |
| МНОГОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1996 |
|
RU2127218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ПРИ КВАЗИЛИНЕЙНОЙ ЗАКОНОМЕРНОСТИ ИХ ИЗМЕНЕНИЯ В ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗАХ БУРОВЫХ ЛЕБЕДОК | 2010 |
|
RU2507423C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРЕДОХРАНИТЕЛЬНОГО ТОРМОЖЕНИЯ | 1972 |
|
SU337332A1 |
СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА ПРЕДОХРАНИТЕЛЬНОГО ТОРМОЖЕНИЯ -ШАХТНОЙ ПОДЪЕМНОЙ МА111ИЦЫ,заключающийся в определении направления движения подъемных сосудов, определении статической разности натяженим опускающейся и поднимающейся ветвей головных канатов и регулировании тормозного усилия, отличающийс я тем, что, с целью повышения надежности, определяют критическую разность натяжений опускающейся и поднимающейся ветвей головных канатов, определяют фактическую разность натяжений в процессе предохранительного торможения, сравнивают их и по величине рассогласования регулируют тормозное усилие.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления тормозными режимами подъемной машины | 1979 |
|
SU770982A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРЕДОХРАНИТЕЛЬНОГО ТОРМОЖЕНИЯ | 0 |
|
SU337332A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
