Изобретение относится к области автоматического управления и может быть использовано в качестве корректирующего устройства в системах автоматического регулирования.
Известно нелинейное корректирующее устройство (НКУ) с амплитудно-частотной характеристикой, как у интегратора, но с малым фазовым запаздыванием [1] . Недостатками НКУ являются величина регулируемого фазового запаздывания (порядка минус 18о), неизменяемый первый наклон логарифмической амплитудно-частотной характеристики (ЛАЧХ) и отсутствие зависимости коэффициента передачи устройства от знака скорости модуля входного сигнала.
Наиболее близким по технической сущности к изобретению является нелинейный интегратор с нулевым фазовым сдвигом, содержащий два канала преобразования входного сигнала устройства, блок перемножения выходных сигналов и интегратор, причем первый канал содержит блок масштабирования входного сигнала, выход которого является выходом первого канала и соединен с входом блока перемножения выходных сигналов каналов, второй канал содержит дифференциатор входного сигнала, блоки определения знаков входного сигнала и его производной по времени, перемножитель выходных сигналов блоков определения знаков, выходной сигнал перемножителя соответствует знаку скорости модуля входного сигнала устройства [2] . Недостатком данного устройства является узость его функциональных возможностей, выражающаяся в неизменности фазочастотной характеристики (ФЧХ) (нулевой фазовый сдвиг) и первого наклона ЛАЧХ, в нерегулируемости зависимости коэффициента передачи устройства от знака скорости модуля входного сигнала, а также в отсутствии механизма компенсации накапливающихся ошибок интегрирования, проявляющихся в дрейфе выходного сигнала аналогового интегратора или ошибках выбранного метода численного интегрирования для цифровых систем.
Цель изобретения - расширение функциональных возможностей устройства за счет уменьшения влияния ошибок интегрирования на частотные характеристики устройства, изменения коэффициента передачи устройства в зависимости от знака скорости модуля входного сигнала при соблюдении условия совпадения знаков входного и выходного сигналов устройства, варьирования порядка интегрирования.
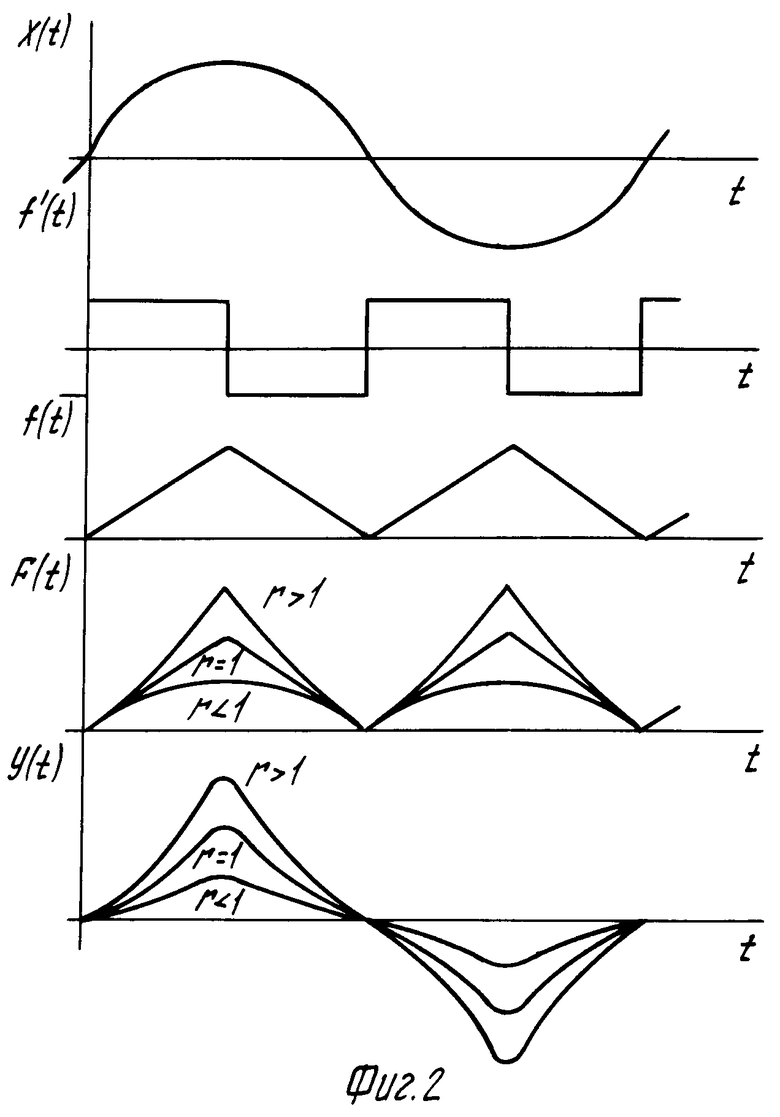
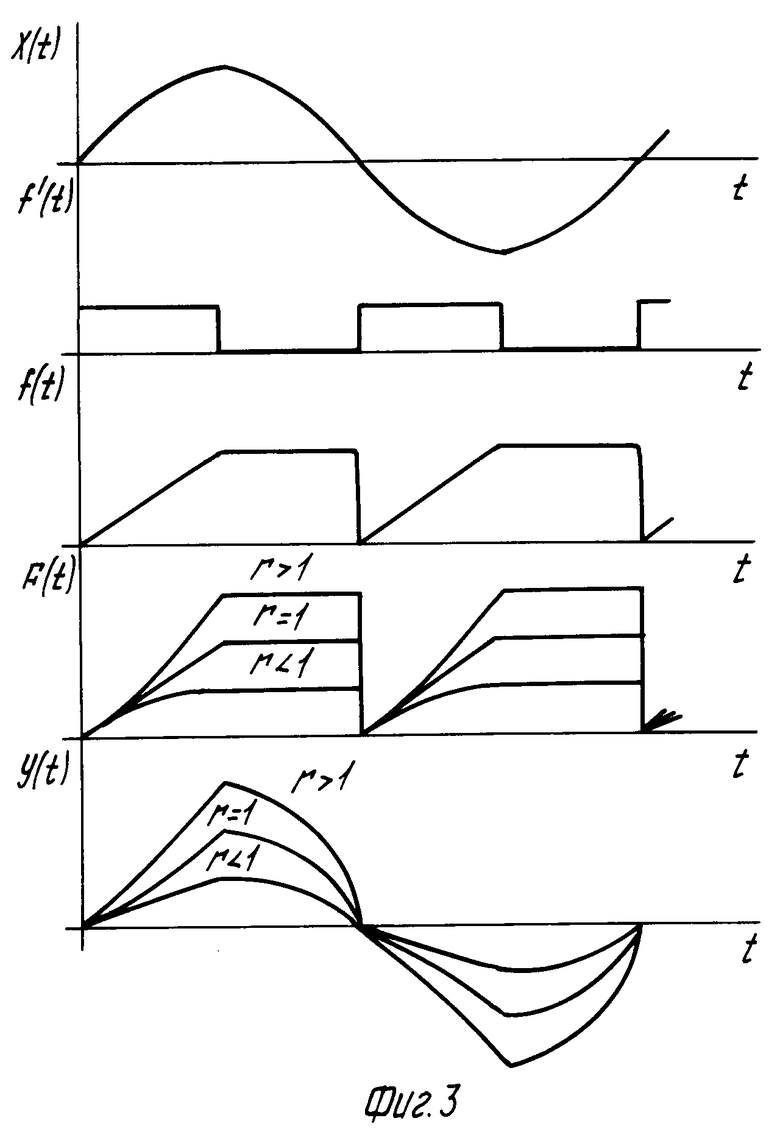
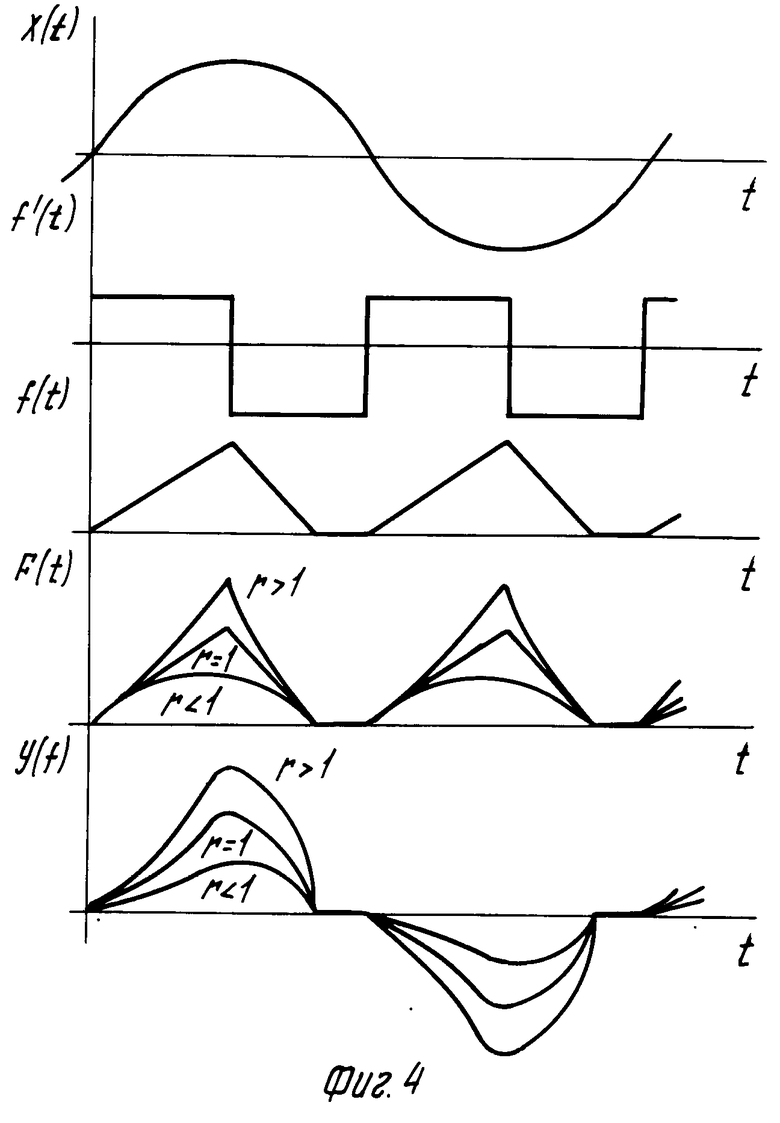
На фиг. 1 представлена функциональная схема НКУ; на фиг. 2 - графики качественных временных зависимостей сигналов для частотного случая НКУ с нулевым фазовым сдвигом; на фиг. 3 - графики качественных временных зависимостей сигналов для частотного случая НКУ с фазовым запаздыванием и неизменным выходным сигналом интегратора при отрицательном знаке скорости модуля входного сигнала НКУ; на фиг. 4 - графики качественных временных зависимостей сигналов для частотного случая НКУ с фазовым опережением. Входной сигнал НКУ на графиках гармонический, без постоянной составляющей.
Устройство содержит блоки 1,2,3 с соответствующими коэффициентами К, К+, К-, сумматоры 4,5, блоки 6,7 перемножения, размыкающий ключ 8, блоки 9,10,11 определения знака сигнала, блок 12 определения положительного знака сигнала, блок 13 определения отрицательного знака сигнала, формирователи 14,15 импульса при нулевом входном сигнале, дифференциатор 16, интегратор 17 с устройством обнуления, блок 18 формирования степенной функции с постоянным положительным показателем степени.
Через x(t) и y(t) обозначены соответственно входной и выходной сигналы НКУ, f'(t) и f(t) - соответственно входной и выходной сигналы интегратора, F(t) - выходной сигнал блока формирования степенной функции и второго канала преобразования входного сигнала НКУ, t - переменная времени, D - оператор дифференцирования, l/D - оператор интегрирования, r - постоянный положительный показатель степенной функции.
Анализ предложенного решения в сравнении с прототипом выявил отличительные признаки, следовательно, предложенное решение обладает критерием новизны.
Анализ предложенного решения в сравнении с другими аналогами выявил наличие в схеме НКУ интегратора во втором канале и устройства обнуления выходного сигнала интегратора, но в отличие от предложенного решения нет блока формирования степенной функции и зависимости коэффициента передачи НКУ от знака скорости модуля входного сигнала. Эти отличия в совокупности со сходными признаками приводят к новому техническому результату - расширению функциональных возможностей. Следовательно, предложенное решение обладает критерием изобретательского уровня.
В соответствии с фиг. 1 устройство работает следующим образом.
Входной сигнал x(t) поступает на входы нескольких ветвей устройства. На выходе ветви, состоящей из последовательно соединенных блоков дифференцирования по времени 16 и определения знака сигнала 9, формируется сигнал знака скорости входного сигнала НКУ. В результате перемножения в блоке 6 знака скорости и знака самого входного сигнала НКУ, определенного в блоке 10, формируется знак скорости модуля входного сигнала НКУ. В зависимости от полярности этого сигнала он пропускается либо через ветвь, состоящую из блоков 12,2 (положительный знак скорости модуля входного сигнала НКУ), либо через ветвь, состоящую из блоков 13,3 и размыкающего ключа 8 (отрицательный знак скорости модуля. На выходе сумматора 4 формируется входной сигнал интегратора 17 f'(t), являющийся масштабированным сигналом знака скорости модуля входного сигнала НКУ. В зависимости от полярности сигнала f'(t) выходной сигнал интегратора f(t) либо увеличивается, либо уменьшается. Далее этот сигнал возводится в положительную степень в блоке 18 формирования степенной функции, и полученный сигнал F(t) перемножается в блоке 7 перемножения с масштабированным в блоке 1 входным сигналом НКУ. В результате перемножения образуется выходной сигнал НКУ y(t). При отрицательном знаке скорости модуля входного сигнала НКУ и при обнулении сигналов f(t), F(t), y(t) сигнал f'(t) также обнуляется. Это условие реализовано в предложенной структуре НКУ с помощью сумматора 5, блоков 10 и 11 определения знаков входного и выходного сигналов НКУ, формирователя 14 импульса при нулевом сигнале, размыкающего (нормально замкнутого) ключа 8. При обнулении выходного сигнала НКУ на выходе блока 11 происходит схема полярности сигнала. При разнополярных сигналах блоков 10 и 11 на выходе сумматора 5 формируется нулевой сигнал, от действия которого формирователь 14 импульса управляет размыкающим ключом 8, который разрывает цепь между блоком 3 и сумматором 4. Отрицательный сигнал на вход интегратора при этом перестает поступать, а положительный может поступать через блок 2 и другой вход сумматора 4. Как только выходной сигнал интегратора становится положительным и знаки входного и выходного сигналов НКУ начинают снова совпадать, на выходе сумматора 5 формируется ненулевой сигнал, формирователь 14 импульса снимает управляющий сигнал и ключ 8 снова замыкает цепь прохождения сигнала отрицательного знака скорости модуля входного сигнала НКУ. Обнуление выходного сигнала интегратора 17 происходит также от действия управляющего сигнала формирователя 15 импульса при нулевом входном сигнале НКУ.
Математически работу устройства можно описать следующей системой уравнений:
y(t) = K*x(t)*F(t);
F(t) = [f(t)] r, r>0;
f(t)=  { K1·[sign(x)·sign(dx/dt)] } ·dt, f(t)≥ 0
{ K1·[sign(x)·sign(dx/dt)] } ·dt, f(t)≥ 0
y(to) = F(to) = f(to) = 0 при x(to) = 0 где К - постоянный положительный коэффициент блока масштабирования входного сигнала устройства;
К1 - постоянный коэффициент блока масштабирования выделенного отрицательного или положительного знака скорости модуля входного сигнала устройства (на фиг. 1 этому коэффициенту соответствует К- и К+, причем К- может быть любым по величине и знаку, К+ обязательно положительным);
to - момент времени срабатывания устройства обнуления выходного сигнала интегратора при нуле входного сигнала НКУ.
НКУ может использоваться в различных местах корректируемой системы автоматического регулирования, прежде всего в канале ошибки следящей системы.
За счет работы устройства обнуления выходного сигнала интегратора происходит периодическое сбрасывание выходного сигнала интегратора f(t) с содержащимися в нем погрешностями интегрирования. Благодаря этому уменьшается влияние ошибок интегрирования на частотные характеристики устройства, реализуется независимость характеристик от начальных условий включения интегратора в работу и обеспечивается малый фазовый сдвиг НКУ. В цифровой реализации НКУ интегратор с устройством обнуления может быть выполнен в виде генератора импульсов и счетчика с обнуляющим входом, который соединен с выходом формирователя 15 импульса обнуления при нуле входного сигнала НКУ. В аналоговом варианте НКУ интегратор может быть реализован с помощью операционного усилителя с емкостью в цепи обратной связи. В этом случае устройство обнуления интегратора представляет собой замыкающий (нормально разомкнутый) ключ, соединенный параллельно емкости, вход управления ключа соединен с выходом формирователя 15 импульса обнуления.
За счет изменения коэффициента передачи устройства в зависимости от знака скорости модуля входного сигнала НКУ при соблюдении условия совпадения знаков входного и выходного сигналов устройства нужным образом изменяются динамические свойства корректируемой системы при увеличении и уменьшении модуля входного сигнала НКУ. В частности, в случае гармонического входного сигнала НКУ при различных расчетных соотношениях величин коэффициентов К- и К+ это приводит к появлению небольшого (максимум до двух-трех десятков градусов) эквивалентного фазового сдвига первой гармоники выходного сигнала относительного входного гармонического сигнала НКУ. Этот фазовый сдвиг регулируется в зависимости от соотношения величин коэффициентов К- и К+ и может быть как положительным, так и отрицательным, в частном случае равенства коэффициентов получается НКУ с нулевым фазовым сдвигом.
Условие совпадения знаков входного и выходного сигналов необходимо для предотвращения возможностей потери устойчивости следящей системы, в которой используется НКУ.
Анализ частотных характеристик НКУ показывает, что они соответствуют ЛАЧХ интегрирующего звена (при показателе степени r= 1), но с малым фазовым сдвигом. За счет выбора показателя степени r блока формирования степенной функции изменяется порядок интегрирования (астатизма) устройства. Благодаря этому изменяется наклон ЛАЧХ гармонически линеаризованной передаточной функции НКУ: по сравнению с r= 1 наклон ЛАЧХ увеличивается при r>1, а при r<1 уменьшается. Соответствующим образом меняются динамические свойства скорректированной системы автоматического управления. Данное свойство подтверждается математическими выкладками, результатами моделирования характеристик НКУ на ЭВМ и результаты испытаний макетного образца.
В отсутствии постоянной составляющей во входном гармоническом сигнале НКУ обладает псевдолинейными свойствами, т. е. его частотные характеристики не зависят от амплитуды входного гармонического воздействия и зависят только от циклической частоты ω , возведенной в степень r.
Вычисления коэффициентов гармонической линеаризации предложенного НКУ выполняются с помощью вычислений определенных интегралов, которые в общем виде (при произвольных значениях r, K-, K+ производятся только через рекурретные соотношения интегралов с понижением степени подинтегральной функции. Поэтому в общем виде невозможно получить окончательные математические выражения вычисляемых интегралов. Числовые значения интегралов можно получить расчетным путем при конкретных величинах r, K-, K+. Также возможно получение законченных математических формул коэффициента передачи КНКУ и фазы FНКУ для частных случаев величин r, K-, K+.
В качестве примеров рассмотрим три частных, наиболее характерных и используемых случая НКУ:
1) с нулевым фазовым сдвигом при K- = K+, а) r= 1, б) r= 2;
2) с фазовым запаздыванием и неизменным выходным сигналом интегратора при отрицательном знаке скорости модуля входного сигнала НКУ, для чего выбирается K- = 0, а) r= 1, б) r= 2;
3) с фазовым опережением при K- >> K+, а) r= 1, б) r= 2.
В этих случаях коэффициент передачи КНКУ и фаза FНКУ в отсутствии постоянной составляющей во входном гармоническом сигнале соответственно равна
1а) КНКУ = 1,104*K*(K+ / ω );
FНКУ = 0о;
1б) КНКУ = 1,322*К*(К+ / ω ); 2
FНКУ = 0о;
2а) КНКУ = 1,360*К*(К+ / ω );
FНКУ = -10,6о;
2б) 2
КНКУ = 1,974*К*(К+/ ω );
FНКУ = -16,2о;
3а)
КНКУ = 0,606*К*(К+/ ω );
FНКУ = +24,4о;
3б) 2
КНКУ = 0,701*К*(К+/ ω );
FНКУ = +19,5о.
Реализация предложенного НКУ возможна в аналоговом, аналогово-цифровом, цифровом видах и в виде программы, работающей в реальном времени.
Применение в системах автоматического управления предложенного НКУ с существенно расширенными функциональными возможностями позволит улучшить их динамические свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ | 1991 |
|
RU2051401C1 |
| ОСКОЛОЧНО-ФУГАСНЫЙ СНАРЯД (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2018779C1 |
| ИМИТАТОР ОСКОЛКА ЕСТЕСТВЕННОГО ДРОБЛЕНИЯ БОЕПРИПАСОВ | 1992 |
|
RU2025644C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД С ПОВОРОТНОЙ БОЕВОЙ ЧАСТЬЮ (ВАРИАНТЫ) | 1992 |
|
RU2032139C1 |
| ОСКОЛОЧНЫЙ СНАРЯД | 1997 |
|
RU2118790C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ГРУНТА | 1990 |
|
RU2028601C1 |
| МАКЕТ БОЕПРИПАСА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ И ВЗРЫВЧАТЫХ ВЕЩЕСТВ НА МЕТАТЕЛЬНО-ДРОБЯЩЕЕ ДЕЙСТВИЕ | 1992 |
|
RU2025646C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1992 |
|
RU2032138C1 |
Изобретение используется в системах автоматического управления (САУ). Целью является расширение функциональных возможностей устройства за счет уменьшения влияния ошибок интегрирования на частотные характеристики устройства, изменения коэффициента передачи устройства в зависимости от знака скорости модуля входного сигнала при соблюдении условия совпадения знаков входного и выходного сигналов устройства, варьирования порядка интегрирования. Нелинейное корректирующее устройство содержит три блока 1, 2, 3 масштабирования сигнала, два сумматора 4, 5, два блока 6, 7 перемножения, нормально замкнутый ключ 8, три блока 9, 10, 11 определения знака сигнала, блок 12 определения положительного знака сигнала, блок 13 определения отрицательного знака сигнала, два формирователя 14, 15 логической единицы, дифференциатор 16, интегратор 17 с устройством обнуления, блок 18 степенной функции. 4 ил.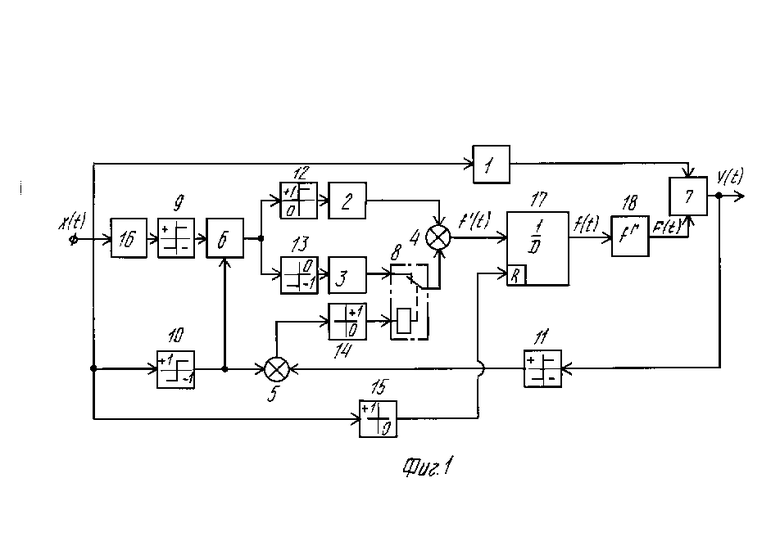
НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее интегратор, первый блок перемножения, выход которого является выходом устройства, а первый вход которого соединен с выходом первого блока масштабирования, вход которого является входом устройства и подсоединен к последовательно соединенным дифференциатору, первому блоку определения знака и второму перемножителю, второй вход которого соединен с выходом второго блока определения знака, вход которого соединен с входом устройства, отличающееся тем, что, в него введены третий блок определения знака, блоки определения положительного и отрицательного знаков сигнала, два блока масштабирования, размыкающий ключ, два формирователя импульса при нулевом входном сигнале, два сумматора, блок формирования степенной функции, причем выход второго перемножителя соединен с входами блоков определения положительного и отрицательного знаков сигналов, выходы которых через соответствующие блоки масштабирования подключены соответственно к первому входу первого сумматора и информационному входу размыкающего ключа, выход которого соединен с вторым входом первого сумматора, а управляющий вход - с выходом первого формирователя импульса при нулевом входном сигнале, вход которого соединен с выходом второго сумматора, первый вход которого подключен к выходу второго блока определения знака, второй вход - к выходу третьего блока определения знака, вход которого соединен с выходом первого перемножителя, выход первого сумматора соединен с входом интегратора, вход обнуления которого подключен к выходу формирователя импульса обнуления при нулевом входном сигнале, вход которого соединен с входом устройства, выход интегратора через блок формирования степенной функции соединен с вторым входом первого блока перемножения.
