Изобретение относится к области локации и навигации и может быть использовано в информационно-измерительных средствах и системах локации, работающих в режимах пассивного обнаружения и пеленгации акустических излучений.
Известно устройство для обнаружения акустических сигналов, содержащее два канала предварительной обработки сигналов, каждый из которых состоит из последовательно соединенных акустического датчика, полосового фильтра, усилителя и порогового элемента, элемента И, генератора тревоги, причем выходы первого и второго пороговых элементов подключены к соответствующим входам элемента И.
При одновременном превышении сигналами на выходе обоих каналов обработки сигналов пороговых значений пороговых элементов появляются сигналы на обоих входах элемента И, сигналом с выхода которого включается генератор тревоги.
Недостатками этого устройства являются невысокая точность формирования и невозможность управления областью принятия решения, а также невозможность определения направления приближения к контролируемой зоне локализованного источника акустического поля, обусловленные тем, что принятие решения осуществляется по логическому совпадению превышения пороговых значений сигналов на выходах двух акустических датчиков, имеющих широкие диаграммы направленности.
Известно устройство обнаружения и пеленгации электромагнитных колебаний, содержащее два канала обработки, каждый из которых состоит из приемных антенн и резонансных усилителей, в первый канал введен фазовращатель на π/2, а также фазового детектора и вольтметра.
После принятия сигналов и усиления их они подаются на фазовый детектор, причем предварительно сигнал первого канала сдвигают по фазе на π/2 для улучшения крутизны пеленгационной характеристики. Выделение фазы принятого сигнала происходит в детекторе. Сигнал на выходе несет информацию о наличии объекта на опорном направлении.
Недостатками этого устройства являются требование точной настройки резонансных усилителей, отсутствие которой приводит к неточности определения направления на объект и невозможность проводить сканирование объекта диаграммой направленности (ДН), а также отсутствие защиты от срабатывания по помехам.
Наиболее близким по технической сущности к предложенному устройству является пассивный пеленгатор источников широкополосного излучения, работающий в двух плоскостях (горизонтальной и вертикальной) и состоящий из трех приемников сигналов, каждый из которых последовательно соединен с полосовым фильтром, дискретным функциональным преобразователем, выходы которых соединены с дискретным преобразователем сигналов (ДПС), соединенным через аналоговый преобразователь сигналов (АПС) и пороговый функциональный преобразователь сигналов (ПФПС) со схемой совпадения. В то же время полосовые фильтры через энергетический канал и второй ПФПС также соединены со схемой совпадения.
После приема сигналы фильтруются и подаются в дискретные функциональные преобразователи. Корреляционная обработка сигналов осуществляется в дискретном преобразователе сигналов (ДПС) и аналоговом преобразователе сигналов (АПС). При превышении порогового уровня ПФПС разрешающий сигнал выдается на схему совпадения. Открытие схемы совпадения и выдача сигнала срабатывания пеленгатора происходит в том случае, если поступит сигнал разрешения со второго ПФПС при разрешающем сигнале о принятых излучениях с энергетического канала.
Недостатками данного пеленгатора являются отсутствие возможности сканирования главным максимумом ДН при работе по подвижным объектам, а также возможность срабатывания по локализованным узкополосным подвижным помехам.
Цель изобретения обеспечение возможности сканирования подвижного источника акустического (или гидроакустического) излучения ДН устройства, а также исключение возможности срабатывания пеленгатора по локализованным узкополосным подвижным помехам.
Это достигается тем, что в пеленгатор источников акустических излучений, содержащий три приемника сигналов, каждый из которых последовательно соединен с полосовым фильтром, дискретным функциональным преобразователем, выходы которых соединены с дискретным преобразователем сигналов (ДПС), соединенного через аналоговый преобразователь сигналов (АПС) и ПФПС со схемой совпадения, параллельно имеющими соединения полосовых фильтров через энергетический канал и второй ПФПС со схемой совпадения, наличие сигнала с которой указывает о срабатывании пеленгатора, после дискретных функциональных преобразователей введены линии задержки в виде регистров сдвига и блок управления ими, а также селектор по относительной ширине полосы частот, включаемый параллельно через схему совпадения в цепь с энергетическим каналом, а также промежуточный и выходной ключи для выдачи дополнительной информации об угле пеленгации.
Сопоставительный анализ с прототипом показывает, что предложенное устройство отличается наличием новых элементов в схеме: селектором от узкополосных помех, линиями задержки и блока управления ими, а также их связями с указанными элементами схемы, промежуточными и выходными ключами. Следовательно, устройство соответствует критерию "новизна".
Сравнение с другими техническими решениями показывает, что повышена защита пеленгатора от ложных срабатываний по подвижным и неподвижным узкополосным помехам. Введение в схему устройства линий задержки и блока управления ими позволяет проводить сканирование ДН источника акустических излучений в двух плоскостях (горизонтальной и вертикальной), что является новым свойством для пассивных пеленгаторов акустических излучений. Введение известных логических ключей позволяет снимать дополнительную информацию об угле пеленга объекта.
Это позволяет сделать вывод о соответствии предложенного решения критерию изобретения "изобретательский уровень".
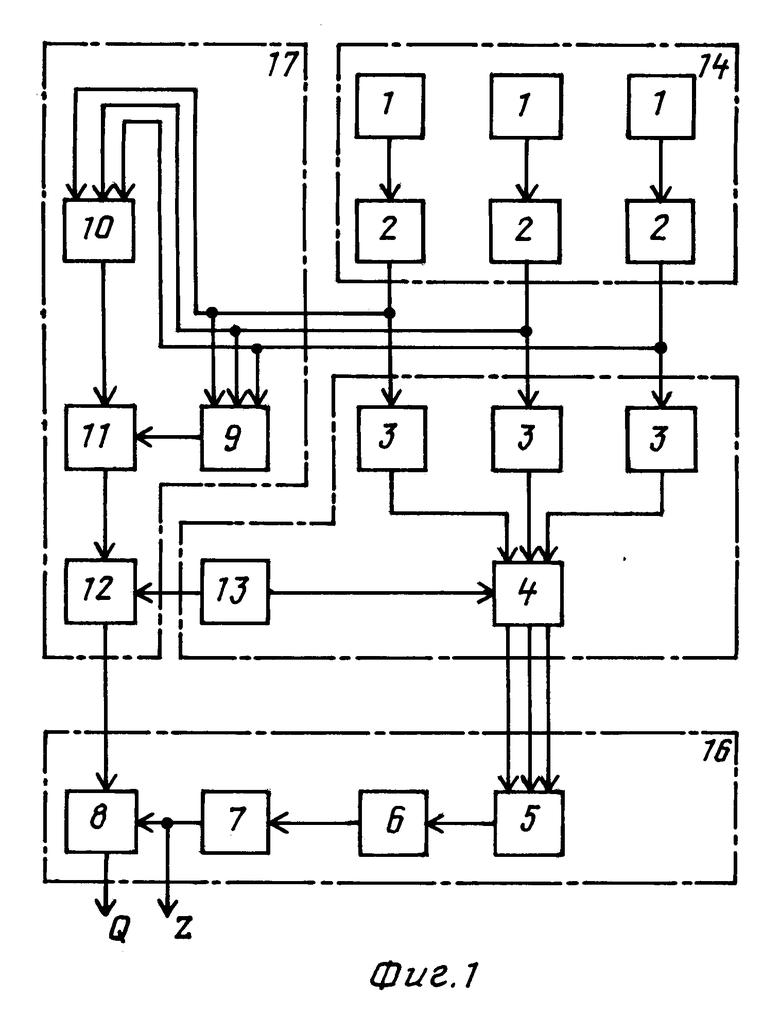
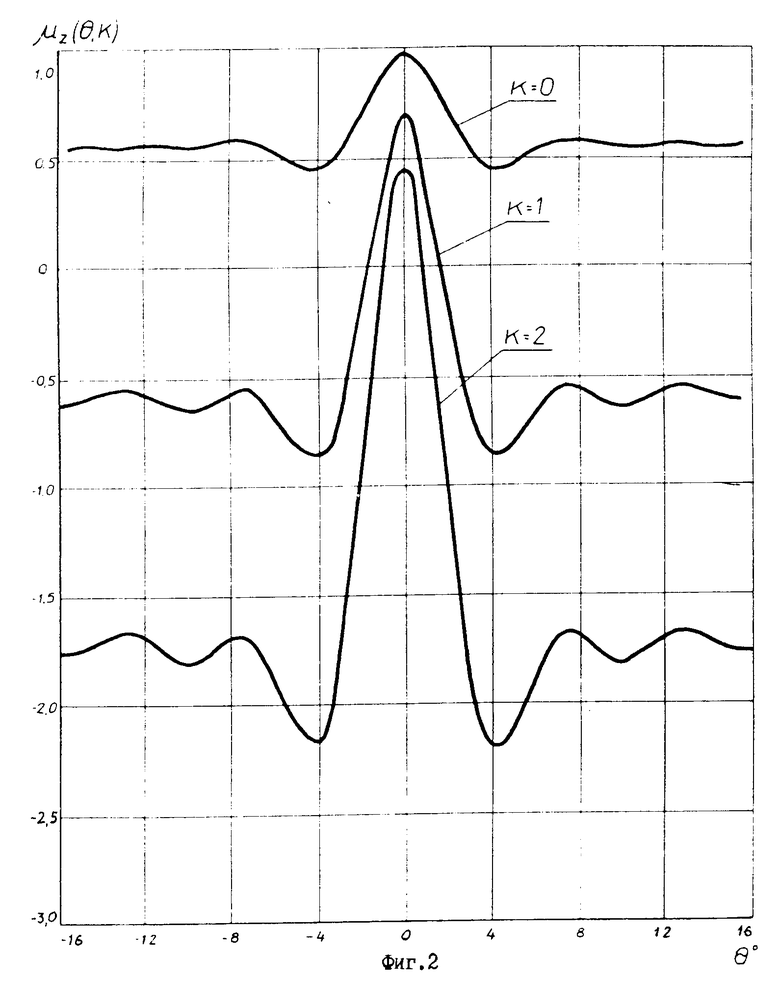
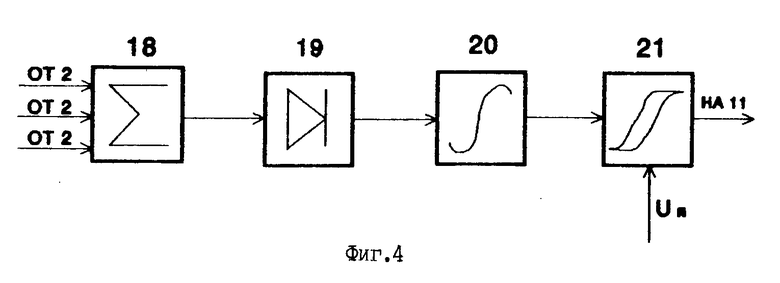
На фиг. 1 приведена структурная схема пеленгатора акустических излучений; на фиг. 2 пеленгационная характеристика устройства при различных весовых коэффициентах К регрессивного алгоритма; на фиг. 3 выполнение ФВЧ на базе операционного усилителя К157УД1; на фиг. 4 структурная схема энергетического канала пеленгатора источников акустического излучения; на фиг. 5 структурная схема дискретного преобразователя сигналов; на фиг. 6 функциональная схема аналогового преобразователя сигналов; на фиг. 7 структурная схема аналогового преобразователя сигналов; на фиг. 8 структурная схема линий задержки и блока управления ими; на фиг. 9 временные диаграммы работы схемы линий задержки и блока управления ими; на фиг. 10 электрическая принципиальная схема линий задержки и блока управления ими.
Пеленгатор источников акустических излучений содержит три электроакустических преобразователя сигналов 1, разнесенных в пространстве на заданном расстоянии и соединенных с тремя комбинированными фильтрами 2, выходы которых соединены с тремя дискретными функциональными преобразователями (ДФП) 3, выходы которых соединены с дискретными линиями задержки 4. Выходы дискретных линий задержки соединены с дискретным преобразователем сигналов (ДПС) 5, выход которого соединен с аналоговым преобразователем сигналов (АПС) 6, выход которого через пороговый функциональный преобразователь (ПФПС) 7 соединен с выходным ключом 8. Выходы комбинированных фильтров 2 также соединены с энергетическим каналом 9 и селектором по относительной ширине частотной полосы 10, выход которого соединен со схемой совпадения 11, один из входов которой соединен с выходом энергетического канала 9, а выход с промежуточным ключом 12, один из входов которого соединен с блоком управления 13, который соединен с дискретными линиями задержки 4, а выход с выходным ключом 8.
Электроакустические преобразователи сигналов 1 с тремя комбинированными фильтрами 2 образуют блок приемных элементов и фильтрации сигналов 14, дискретные функциональные преобразователи 3 с линиями задержки 4 и блоком 13 управления ими образуют блок знаковой обработки и линий задержки 15. Дискретный преобразователь сигналов (ДПС) 5 с аналоговым преобразователем сигналов (АПС) 6, пороговым функциональным преобразователем сигналов (ПФПС) 7 и выходным ключом 8 образуют блок корреляционной обработки сигналов 16.
Энергетический канал 9 с селектором по относительной ширине частотной полосы 10, схемой совпадения 11 и промежуточным ключом 12 образуют блок обнаружения и распознавания объекта от помех 17.
Рассмотрим конкретный пример воплощения указанной схемы пеленгатора источников акустических излучений (см. фиг. 1), где электроакустические преобразователи сигналов 1 представляют собой электромагнитные микрофоны типа ДЭМШ, разнесенные в каждой плоскости работы (горизонтальной и вертикальной) на расстояние d 5 λo (λo длина волны средней частоты спектра).
Комбинированные фильтры 2 представляют собой совокупность двух активных полосовых фильтров ФНЧ и ФВЧ. Фильтры построены по принципу последовательного включения. Они имеют следующие характеристики.
Фильтр нижних частот (ФНЧ): полоса пропускания Δ f0.7 500 Гц на fон 350 Гц с крутизной нарастания Кн 60 дБ/дек и крутизной спада Кс= 40 дБ/дек.
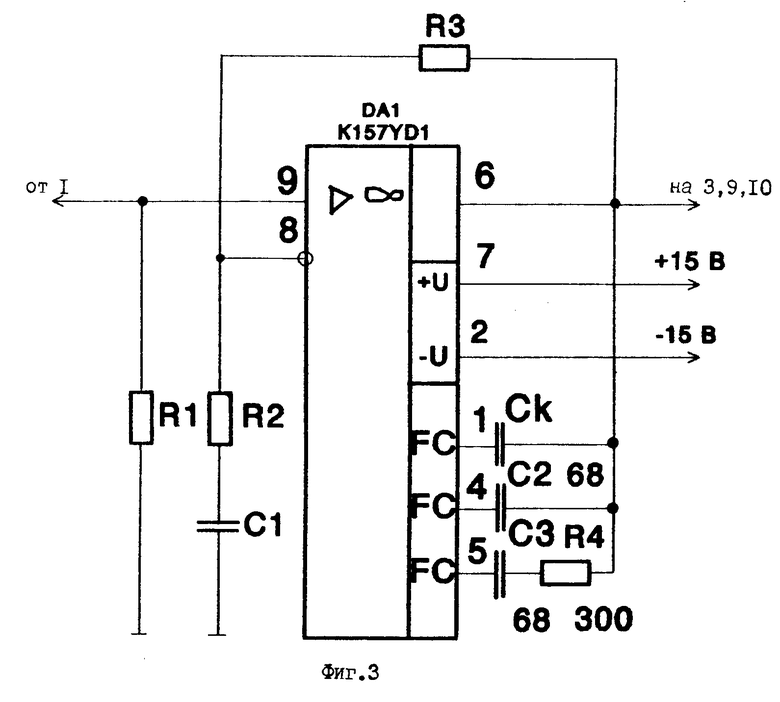
Фильтр высоких частот (ФВЧ): полоса пропускания Δ f0.7 750 Гц на fов 2200 Гц с крутизной нарастания Кн 20 дБ/дек и крутизной спада Кс=40 дБ/дек.
На фиг. 3 представлен пример выполнения ФВЧ на базе операционного усилителя К157УД1.
Дискретные функциональные преобразователи (ДФП) 3 блока 15 и пороговый функциональный преобразователь сигналов (ПФПС) 7 блока 16 выполнены на микросхемах типа К554СА3, включенных типовым образом.
Энергетический канал 9 блока 15 представлен сумматором 18, двухполупериодным детектором 19, интегратором 20 и пороговым блоком 21, включенными последовательно (см. фиг. 4).
Интегратор 20 построен на RC-цепи, значение постоянной времени интегрирования τинт которой выбирается исходя из значения времени нахождения tн пеленгуемого объекта в пределах главного максимума ДН (см. фиг. 2), зависящее от скорости предполагаемого объекта Uоб и ширины ДН. В общем случае τинт< tн. В предлагаемом пеленгаторе τинт равно 140 мс. Пороговое напряжение Uп порогового блока 21 выбирается исходя из зависимости Uп σc/3, где σс среднеквадратическое значение сигнала на входе порогового блока 21, зависящее от чувствительности Sээлектроакустических преобразователей 1 и от падающего на них звукового давления Pзв. В предлагаемом пеленгаторе Uп 300 мВ.
В качестве промежуточного ключа 12 блока 17 и выходного ключа 8 блока 16 использован транзистор КТ315 (можно использовать АМС серии К590)
Схема совпадения 11 блока 17 (см. фиг. 1) реализована на элементе И.
Селектор по относительной ширине частотной полосы входного процесса 10 выполнен в виде дискретно-аналоговой системы с широтно-импульсной модуляцией (ШИМ), обрабатывающей интервалы между нулями входных реализаций, в которой реализован регрессионный алгоритм вида Uo[2·1(t)-Kсζ(t)] dt≥ Uп (1) где τн постоянная времени инерционной цепи селектора, выбранная исходя из τн >> Тт, в нашем случае τн 0,08 с;
Uo[2·1(t)-Kсζ(t)] dt≥ Uп (1) где τн постоянная времени инерционной цепи селектора, выбранная исходя из τн >> Тт, в нашем случае τн 0,08 с;
Тт π / ωo тактовые интервалы клиппированного случайного процесса ζ (t) на центральной частоте спектра;
Кс весовой коэффициент алгоритма работы селектора (Кс 1,2 ÷ 1,5);
Uо амплитуда импульсов случайного импульсного процесса;
Т длительность реализации;
1(t) единичная функция;
Uп пороговый уровень, который выбирается исходя из относительной полосы α энергетического спектра процесса и от параметра К, для нашего случая Uп 200 ÷ 300 мВ).
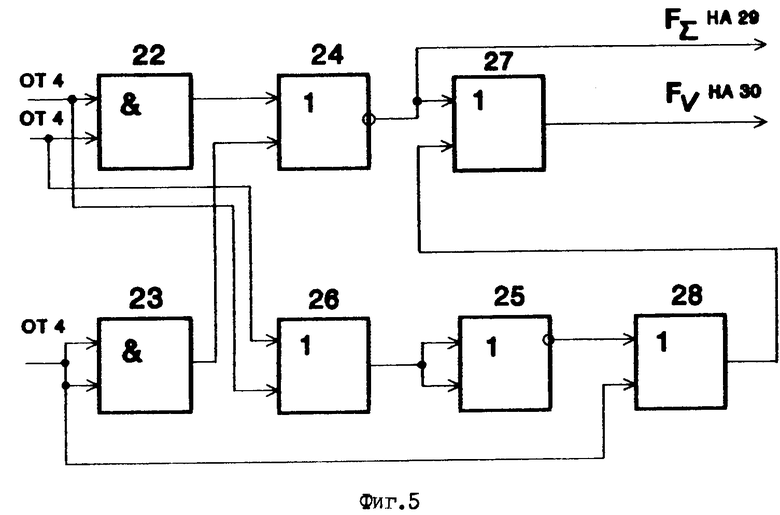
ДПС 5 блока 16 состоит из двух логических элементов И 22 и 23, двух логических элементов ИЛИ-НЕ 24 и 25, трех логических элементов ИЛИ 26, 27 и 28 (см. фиг. 5).
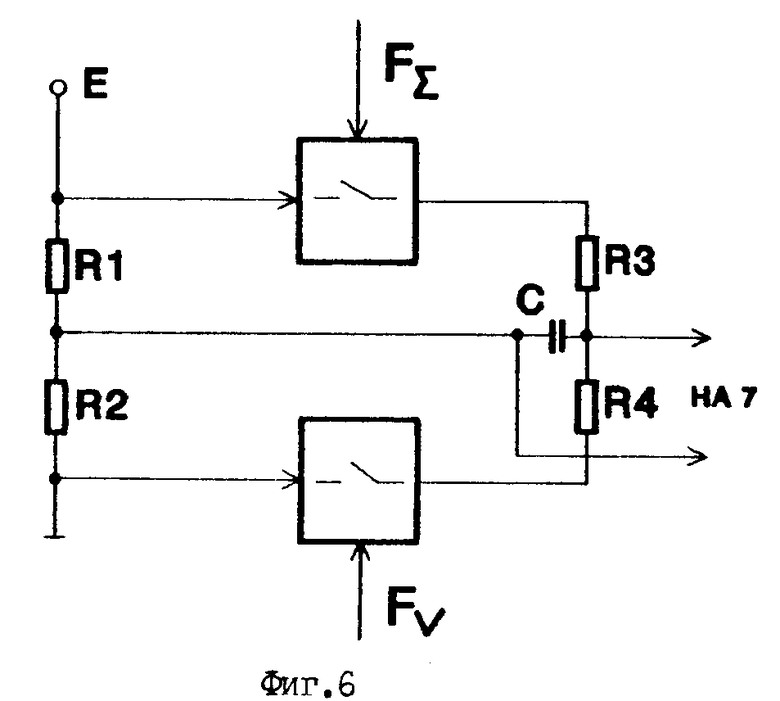
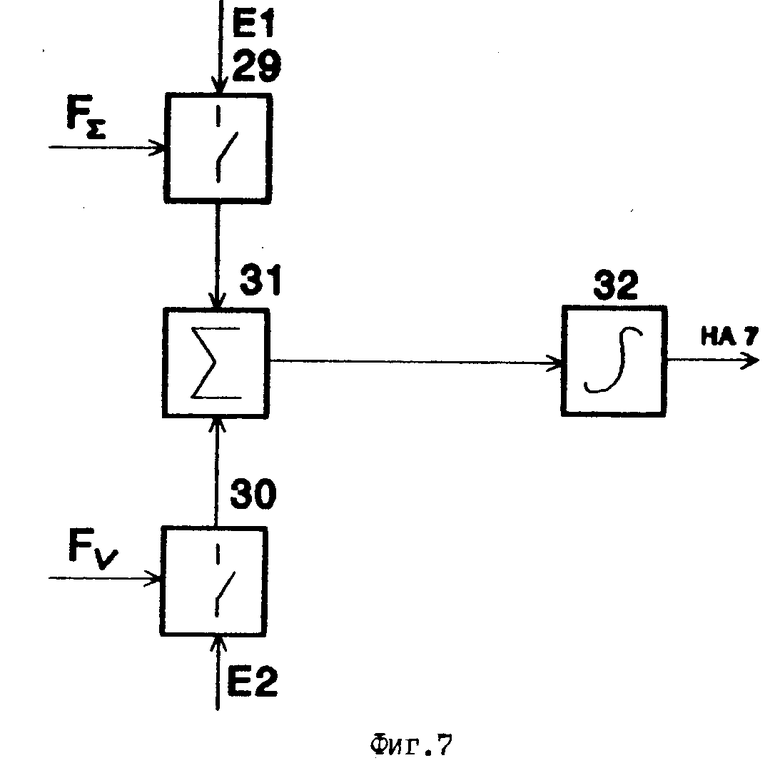
АПС 6 блока 16 (см. фиг. 7) состоит из аналоговых ключей 29 и 30, сумматора 31 и интегратора 32, выполненного на RC-цепях (R3C и R4С при R3 R4 >> R2 и τиА τинт интегратора энергетического канала 9 блока 15, τиА 140 мс (см. фиг. 6).
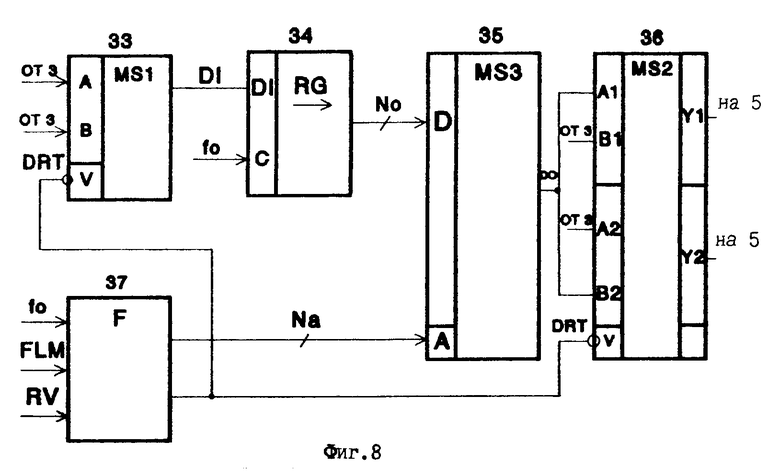
Линии задержки 4 и блок управления 13 блока 15 содержат (для первой пары каналов, работающих в одной плоскости: для пары каналов, работающих в перпендикулярной плоскости выполнение идентичное) входной (МS1) мультиплексор 33, регистр сдвига (RG) 34, мультиплексор задержанного сигнала (MS3) 35, выходной мультиплексор (MS2) 36, схему формирования кода адреса и сигналов управления (F) 37 (см. фиг. 8). Элементы схемы 33 37 реализуются на ИС 564 серии.
Пеленгатор источника акустических излучений работает следующим образом.
При попадании локализованного источника акустического поля в зону действия (диаграмму направленности) электроакустических преобразователей сигналов 1 на комбинированные фильтры 2 поступают сигналы разности фаз Δ ϕg/v (f) на данной частоте f в каждой сканирующей плоскости (горизонтальной или вертикальной, g/v) за счет разности хода акустических волн до электроакустических преобразователей сигналов 1 определяется в виде:
Δϕd/v(f)  sinθd/v где θg/v угол между опорным направлением источника акустического поля (в зависимости от сканирующей плоскости горизонтальная или вертикальная) и текущим положением;
sinθd/v где θg/v угол между опорным направлением источника акустического поля (в зависимости от сканирующей плоскости горизонтальная или вертикальная) и текущим положением;
dg/v расстояние между электроакустическими преобразователями сигналов (в горизонтальной или вертикальной плоскостях);
с скорость звука.
Для уменьшения влияния на точность пеленгации нестабильностей коэффициентов передачи трактов и для расширения динамического диапазона сигналы после фильтрации подвергаются функциональному преобразованию вида
x(t)=f[ζ(t)]



y(t)=f[η(t)]


 (2)
(2)
z(t)= f[γ(t)]


 где ζ (t), η (t), γ (t) сигналы до и x(t), y(t), z(t) сигналы после функционального преобразования в ДФП 3 соответственно в каждом из каналов.
где ζ (t), η (t), γ (t) сигналы до и x(t), y(t), z(t) сигналы после функционального преобразования в ДФП 3 соответственно в каждом из каналов.
Корреляционная обработка, формирующая область принятия решения, осуществляется в ДПС 5 и АПС 6 по регрессионному алгоритму совместного сравнения значений сигналов знакосовпадения на выходе трех электроакустических преобразователей сигналов 1 после фильтрации в комбинированных фильтрах 2 и функционального преобразования (2) в ДФП 3 (см. фиг. 1) в следующем виде:
 E(t)[FΣ(t)-K·Fv(t)]dt≥ 0 (3) где Т время принятия решения, выбирается исходя из времени наблюдения tн, которое зависит от угла сканирования объекта; при θск ± 60о и Uоб= 100 м/c, Т 40 с на дальностях до 2 км;
E(t)[FΣ(t)-K·Fv(t)]dt≥ 0 (3) где Т время принятия решения, выбирается исходя из времени наблюдения tн, которое зависит от угла сканирования объекта; при θск ± 60о и Uоб= 100 м/c, Т 40 с на дальностях до 2 км;
Е(t) напряжение питания на интервале принятия решения Е(t) E const +-12 В;
FΣ (t) функция алгебры логики, отражающая знакосовпадение квантованных сигналов во времени, а следовательно, совпадение фаз сигналов на каждой частоте на входах ДФП 3;
Fv(t) функция алгебры логики, отражающая знаконесовпадение квантованных сигналов во времени на каждой частоте на входах ДФП 3;
К коэффициент регрессионного алгоритма, определяющий ширину области срабатывания пеленгатора (см. фиг. 2) и пороговый уровень Uп; для К 1 2, Uп 0 В.
Величина FΣ (t) формируется цепью элементов И 22 и 23, ИЛИ-НЕ 24 (см. фиг. 5) и аналогового ключа 29 (см. фиг. 7); величина Fv(t) формируется при помощи цепи из элементов И 22 и 23, ИЛИ-НЕ 24 и 25, ИЛИ 26, 27, 28 (см. фиг. 5) и аналогового ключа 30 (см. фиг. 7).
Коэффициент К регрессионного алгоритма (3) задается резисторами R1 и R2 (см. фиг. 6).
Работа дискретно-аналогового регрессионного алгоритма (3), осуществляемая в ДПС 5 и АПС 6 блока 16, состоит в следующем: при знакосовпадении сигналов на управляющих входах аналоговых ключей 29 и 30 (см. фиг. 7) функция алгебры логики Fv(t) обращается в нуль, а при знаконесовпадении сигналов функция алгебры логики FΣ (t) обращается в нуль.
Таким образом при попадании локализованного источника акустического поля в область принятия решения (пеленгационную характеристику) ДФП 3 (см. фиг. 2) сигналы на входах на каждой частоте приема практически совпадают по фазе (совмещены по времени). При этом функция алгебры логики Fv(t) обращается в нуль, тогда сигнал на выходе резистора R2 (см. фиг. 6) близок к нулю. В этом случае сигнал с выхода управляемого ключа 29, проходя через сумматор 31 и интегратор 32 (см. фиг. 7), оказывается достаточным для срабатывания порогового элемента 7 (см. фиг. 1).
Срабатывание элемента 7 используется как факт работы пеленгатора Z. Сигналы с комбинированных фильтров 2 параллельно подаются на энергетический канал 9 и селектор по относительной ширине частотной полосы 10. Если принятые сигналы достаточны по своему энергетическому уровню и не принадлежат к классу "Помеха" по своей частотной полосе, то появляется сигнал на выходе схемы совпадения И 11, который открывает промежуточный ключ 12, на вход которого подается сигнал с блока управления линиями задержек 13, содержащий информацию об угле сканирования. В результате этого появляется сигнал на выходе выходного ключа 8 блока 16 (см. фиг. 1), несущий информацию об угловом положении источника акустических волн θ.
При срабатывании пеленгатора Z при работе по узкополосной помехе не происходит выдачи сигнала θ, несущего информацию об угле пеленга объекта.
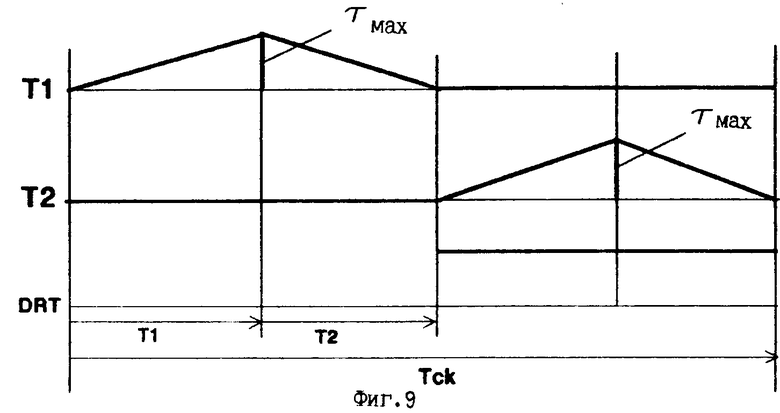
В случае нахождения источника акустического поля вне области принятия решения (пеленгационной характеристики) осуществляется активный поиск (сканирование или слежение) путем введения управляемых временных задержек следующим образом (см. фиг. 2). Для наглядности рассмотрим временные диаграммы (см. фиг. 9), иллюстрирующие работу схемы линий задержек и блока управления ими (фиг. 8, в одной плоскости; в перпендикулярной работа идентична). Схема работает в режимах сканирования и слежения.
Выбор режима производится уровнем сигнала FLW: низкий уровень соответствует режиму сканирования, а высокий режиму слежения. В режиме слежения направление поворота диаграммы направленности задается сигналом RU (от reverse).
На фиг. 9 показано изменение основных сигналов в режиме сканирования. Сначала линия задержки включается в канал 1, задержка в котором линейно изменяется за время Т1 от 0 до τmах. При этом сигнал направления DRT имеет низкий уровень. Максимальной задержке τmaxсоответствует поворот диаграммы на угол θск/2, после чего выполняется поворот ДН обратно, переключение линии задержки в канал 11 и поворот диаграммы сначала вправо на θск/2, а потом обратно. Время поворота Т2также равно Т1. Уровень сигналов DRT показывает в какой из каналов включается линия задержки. Таким образом период сканирования Тск равен 4Т1. В предлагаемом пеленгаторе, исходя из ширины главного максимума ДН и времени интегрирования τиА интегратора 32 (см. фиг. 7), равного τиА=140 мс, с учетом дискретности изменения углов поворота Δ θ 1,5о при диапазоне сканирования θск +-60о Тск 22,5 с.
При реализации линий задержки в виде регистра сдвига 34 (см. фиг. 8) изменение величины задержки производится дискретно путем переключения выходов регистра. Режим сканирования или слежения формируется на выходе схемы 37 (см. фиг. 8) кодом адреса Na, поступающего на мультиплексор (MS3) 35 (см. фиг. 8). Разрядность кода адреса Na определяет дискретность изменения углов поворота Δ θ диаграммы направленности: Δ θ θск/2NА+1. В режиме слежения точность поворота повышается вдвое путем увеличения Na.
Основные характеристики схемы линий задержки и блока управления ими определяются исходя из требуемой точности сканирования и слежения, а также исходя из необходимой точности обработки принимаемого сигнала.
С учетом того, что время задержки определяется как
τм sin
sin (4) для dg 1 м, θск 120о, с 330 м/с, τм 2,62 мс.
(4) для dg 1 м, θск 120о, с 330 м/с, τм 2,62 мс.
Пусть тактовая частота fo записи и сдвига выбирается такой, чтобы получилось десять отсчетов сигнала за период частоты Fo несущей принимаемого сигнала. Тогда fo20 кГц для Fo 2 кГц и для обеспечения задержки τм необходимо No разрядов регистра сдвига No 52,4 (No fo ˙ τм). Очевидно, что No целесообразно округлить до ближайшего числа, равного 2n, т. е. No 64. Поэтому возможно воспользоваться 64-х разрядным регистром сдвига, при этом тактовая частота равна fo N/ τм 64/(2,62 ˙ 10-3) 24,4 кГц. Тогда обеспечивается 12,2 отсчетов за период, а величина fo позволяет реализовать схему на ИС серии 564.
Если выбирать дискретность Δ θ поворота диаграммы равной 1,5о в режиме сканирования и 0,75о в режиме слежения, то разрядность Na должна быть равной 5-и и 6-и соответственно.
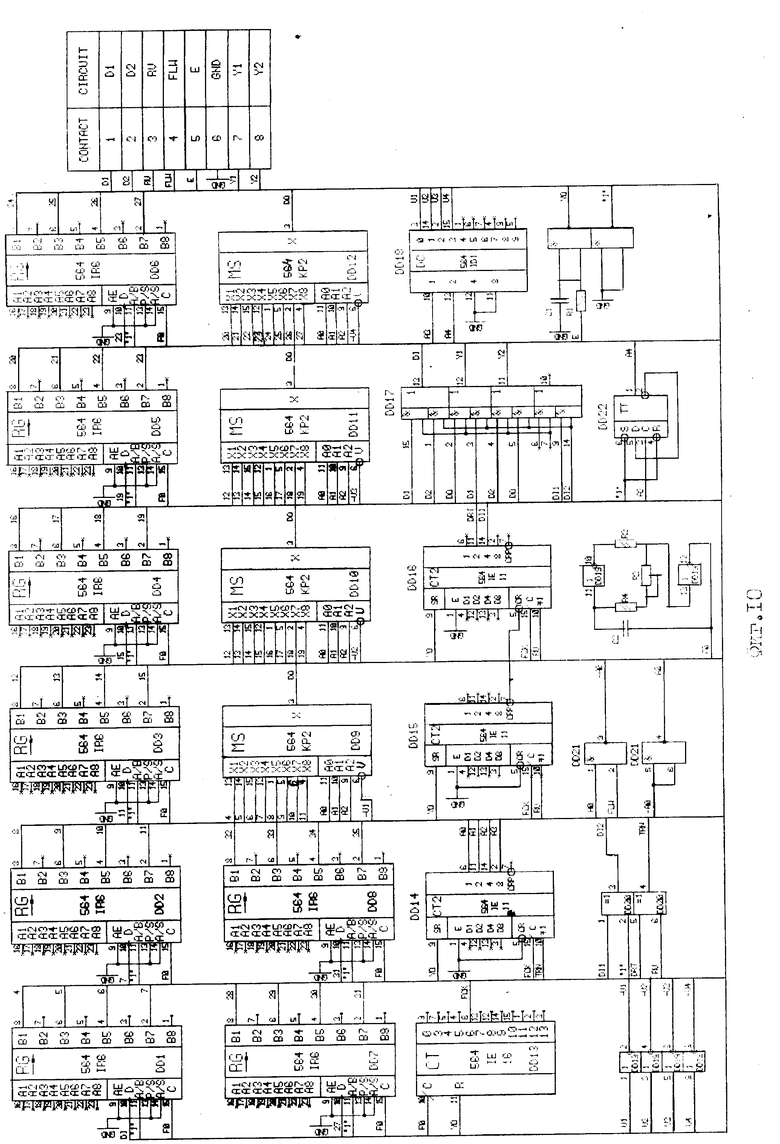
На фиг. 10 приведена электрическая принципиальная схема линий задержек и блока управления ими с тактовой частотой 24,4 кГц. Основные характеристики схемы fo 24,4 кГц, θск ± 60о, Δ θ 1,5о/0,75о, τм=2,62 мс, No 64. В качестве линий задержек применены регистры сдвига 564ИР6 (DD1 DD8), работающие в режиме последовательного ввода информации. Переключение задержек осуществляется мультиплексорами 8 ˙ 1 (ИС 564КП2, DD9 DD12). Мультиплексоры имеют третье состояние по выходу, что позволило объединить их выходы по схеме "проводного-ИЛИ". Все мультиплексоры управляются тремя младшими разрядами адреса (A0, A1, A2), а выбор того или иного участка линии задержки сигналами U1 U4.
Изменение адресов Ai производится с частотой сканирования Fск, которая получается путем деления тактовой частоты fo счетчика 564ИЕ16 (DD13), коэффициенты деления которого можно выбирать любым от 21 до 214(кроме 4 и 8) постановкой перемычки.
На счетчике 564ИЕ11 (DD14) и триггере 564ТМ2 (DD22.1) построена схема формирования адресов A0 A4. Счетчики DD15 и DD16 (564ИЕ11) осуществляют выработку сигналов управления DRT и DI1. Все счетчики в схеме работают в режиме реверсирования, управляются по входу "+/-" сигналами TRN и RN. Два старших разряда кода адреса используются для выбора работающего мультиплексора через дешифратор 564ИД1 (DD18) с инверторами 564ЛН2 (DD19.1-4).
Сигнал направления счета TRN получается путем двоичного суммирования сигналов DRT и RN на элементе 564ЛП2 (DD20.2). При переходе в режим слежения вдвое возрастает число дискретных положений диаграммы направленности. Это достигается переключением изменяющихся разрядов адреса. В режиме сканирования младший разряд адреса A0 равен нулю, а при слежении он определяется состоянием младшего разряда счетчика DD14. Переключение осуществляется элементом DD21.1 (564ЛА7) с последующим инвертированием DD21.2. Источником импульсов тактовой частоты служит генератор, построенный на инверторах DD19.5,6. На элементе DD21.3 выполнен узел сброса схемы и начала нормального функционирования при включении источника питания. Элемент 2И-НЕ (DD21.4) используется как генератор потенциала логической единицы. Коммутация входных сигналов для линии задержки, а также переключение сигналов в выходные цепи в соответствии с фиг. 9 выполняется селектором-мультиплексором 564ЛС2 (DD17).
Экспериментальные исследования предложенного пеленгатора акустических излучений показали, что по сравнению с устройством аналогичного назначения заявляемый пеленгатор акустических излучений обеспечивает сканирование подвижного объекта в двух плоскостях измерений (горизонтальной и вертикальной) и селекцию сигналов на фоне узкополосных локализованных подвижных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| ОСКОЛОЧНО-ФУГАСНЫЙ СНАРЯД (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2018779C1 |
| КАССЕТНЫЙ СНАРЯД НАПРАВЛЕННОГО ОСКОЛОЧНОГО ДЕЙСТВИЯ | 1993 |
|
RU2034232C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД С ПОВОРОТНОЙ БОЕВОЙ ЧАСТЬЮ (ВАРИАНТЫ) | 1992 |
|
RU2032139C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1992 |
|
RU2032138C1 |
| ОСКОЛОЧНЫЙ СНАРЯД | 1997 |
|
RU2118790C1 |
| ИМИТАТОР ОСКОЛКА ЕСТЕСТВЕННОГО ДРОБЛЕНИЯ БОЕПРИПАСОВ | 1992 |
|
RU2025644C1 |
| СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ | 1991 |
|
RU2051401C1 |
| МАКЕТ БОЕПРИПАСА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ И ВЗРЫВЧАТЫХ ВЕЩЕСТВ НА МЕТАТЕЛЬНО-ДРОБЯЩЕЕ ДЕЙСТВИЕ | 1992 |
|
RU2025646C1 |
Использование: в навигации для пассивного обнаружения и пеленгации акустических излучений. Сущность изобретения: обеспечение возможности сканирования подвижного источника акустического (гидроакустического) излучения диаграммой направленности устройства, а также исключение возможности срабатывания пеленгатора по локализованным узкополосным подвижным помехам. 10 ил.
ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ, содержащий приемники сигналов, каждый из которых последовательно соединен с полосовым фильтром, дискретным функциональным преобразователем, дискретный преобразователь сигналов, соединенный через аналоговый преобразователь сигналов и первый пороговый функциональный преобразователь сигналов со схемой совпадения, имеющий параллельное соединение полосовых фильтров через энергетический канал с второй пороговый функциональный преобразователь сигналов со схемой совпадения, отличающийся тем, что в него введены линии задержки и блок управления ими, а также селектор по относительной ширине полосы частот, включаемый параллельно в цепь с энергетическим каналом, а также промежуточный и выходной ключи для выдачи дополнительной информации об угле пеленга, причем входы линий задержки соединены с выходами дискретных функциональных преобразователей блока знаковой обработки и линий задержки, а выходы линий задержки подключены к дискретному преобразователю сигналов, блок управления линиями задержки соединен с линиями задержки и промежуточным ключом блока обнаружения и селектирования помех, селектор подвижной локализованной помехи соединен с полосовыми фильтрами параллельно с энергетическим каналом, причем выходы энергетического канала и селектора подвижной локализованной помехи соединены со схемой совпадения блока обнаружения и селектирования помех, а выход совпадения через промежуточный ключ соединен с выходным ключом.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мусьяков М | |||
| П., Хохлов В | |||
| К | |||
| Регрессивные системы обнаружения и распознавания случайных сигналов в ближней локации | |||
| М.: ЦНИИНТИКПК, 1988, с.172. | |||
