Изобретение относится к системам автоматического управления и может быть использовано при управлении рабочими органами станков, летательных аппаратов и антенных постов.
Известна следящая система автоматического управления рабочим органом (исполнительным элементом) станка (ССАУС) [1]
Наиболее близкой к изобретению является ССАУС, содержащая задающее устройство, первое сравнивающее устройство, усилитель, параллельное корректирующее устройство, датчик обратной связи, а также последовательно соединенные второе сравнивающее устройство, последовательное корректирующее устройство, усилитель мощности, двигатель и рабочий орган, при этом выход задающего устройства подключен к первому входу первого сравнивающего устройства, выход усилителя соединен с первым входом второго сравнивающего устройства, а выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи к второму входу первого сравнивающего устройства [2]
Недостатком этой системы является невозможность добиться высокой точности стабилизации рабочего органа станка относительно программной траектории вследствие того, что увеличение точности стабилизации приводит к увеличению коэффициента усиления прямой цепи следящей системы, что уменьшает запасы устойчивости системы, и к увеличению требований к быстродействию двигателя.
Цель изобретения увеличение точности следящей системы автоматического управления за счет компенсации неизмеряемых внешних и параметрических возмущений. В этом случае высокая точность следящей системы достигается без ухудшения качества переходного процесса в системе, без увеличений требований к быстродействию двигателя.
Для этого следящая система содержит блок идентификации и формирования сигналов для компенсации возмущений и первый сумматор, причем выходы первого сравнивающего устройства и блока идентификации и формирования сигналов для компенсации возмущений подключены соответственно к первому и второму входам первого сумматора, выход которого связан с входом усилителя и первым входом блока идентификации и формирования сигналов для компенсации возмущений, к остальным входам которого подсоединены выходы соответственно усилителя, второго сравнивающего устройства, последовательного корректирующего устройства, усилителя мощности и датчика обратной связи.
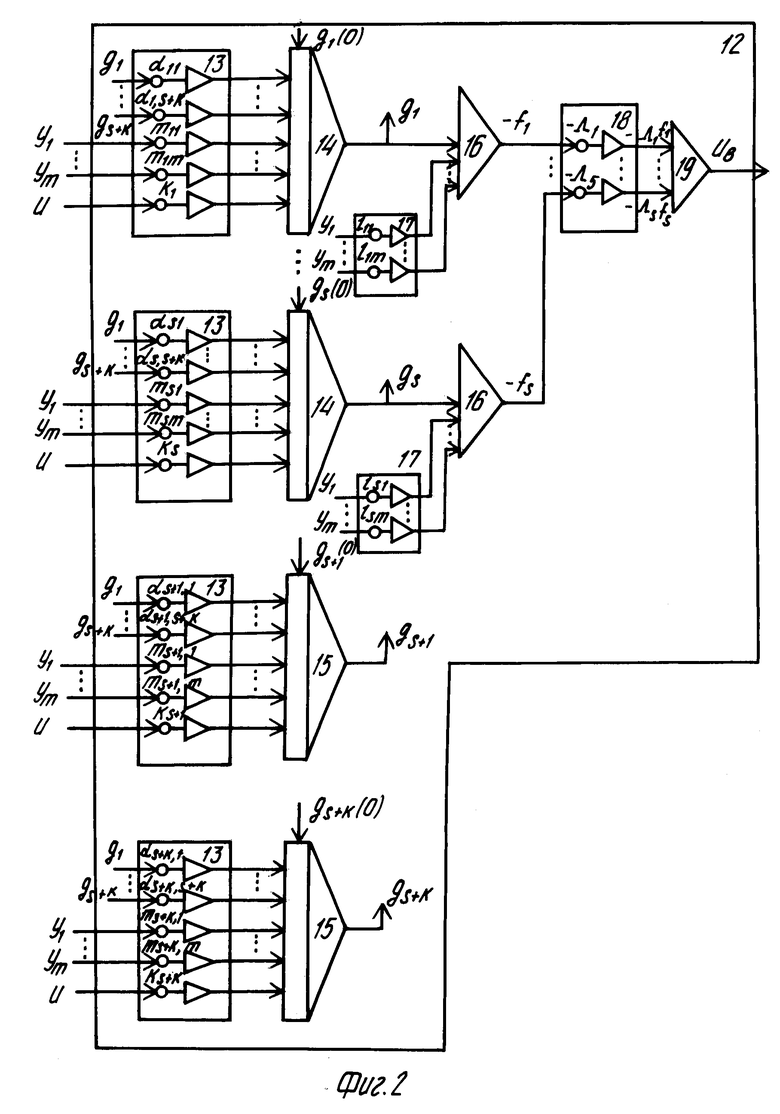
На фиг. 1 представлена функциональная схема следящей системы; на фиг.2 схема блока идентификации и формирования сигналов для компенсации возмущений.
Следящая система автоматического управления содержит задающее устройство 1, первое сравнивающее устройство 2, усилитель 3, последовательное корректирующее устройство 4, усилитель 5 мощности, двигатель 6, рабочий орган 7, параллельное корректирующее устройство 8, датчик 9 обратной связи, второе сравнивающее устройство 10, первый сумматор 11, блок 12 идентификации и формирования сигналов для компенсации возмущений. Блок 12 содержит первые группы масштабных усилителей 13, первые интегросумматоры 14, вторые интегросумматоры 15, вторые сумматоры 16, вторые группы масштабных усилителей 17, третью группу масштабных усилителей 18 и третий сумматор 19.
Следящая система работает следующим образом.
Под воздействием внешних и параметрических возмущений рабочий орган 7 отклоняется от траектории задаваемой задающим устройством 1, выход которого соединен с первым входом первого сравнивающего устройства 2. Датчик 9 обратной связи измеряет действительное положение рабочего органа 7. Эта информация подается на второй вход первого сравнивающего устройства 2. Первое сравнивающее устройство 2 вырабатывает сигнал Uст(сигнал рассогласования или сигнал стабилизирующего управления), представляющий собой разность сигналов, поступающих на его два входа. Вид этого сигнала зависит от характеристик устройств следящей системы: усилителя 3, усилителя 5 мощности, двигателя 6, датчика 9 обратной связи, корректирующих устройств 4 и 8 и влияет на качество переходных процессов в системе. Характеристики устройств следящей системы выбираются на этапе ее синтеза исходя из основных требований к ней: запасов устойчивости, точности, быстродействия. Передаточные функции последовательного и параллельного корректирующих устройств имеют соответственно вид:

 и S
и S
 , где v1, v2, l1, l2 целые неотрицательные числа. Сигнал Uст с выхода первого сравнивающего устройства подается на первый вход первого сумматора 11. На второй вход первого сумматора 11 подается управление Uв, компенсирующее внешние и параметрические возмущения, с выхода блока 12 идентификации и формирования сигналов для компенсации возмущений. Первый сумматор 11 вырабатывает управляющий сигнал
, где v1, v2, l1, l2 целые неотрицательные числа. Сигнал Uст с выхода первого сравнивающего устройства подается на первый вход первого сумматора 11. На второй вход первого сумматора 11 подается управление Uв, компенсирующее внешние и параметрические возмущения, с выхода блока 12 идентификации и формирования сигналов для компенсации возмущений. Первый сумматор 11 вырабатывает управляющий сигнал
U Uст+Uв, (1) который обеспечивает требуемое качество переходных процессов в системе и компенсацию неизмеряемых внешних и параметрических возмущений. Сигнал управления U с выхода первого сумматора 11 подается на вход усилителя 3 и на первые входы первых групп масштабных усилителей 13. В усилителе 3 сигнал управления усиливается и подается на первый вход второго сравнивающего устройства 10. На второй вход второго сравнивающего устройства 10 подается сигнал с выхода параллельного корректирующего устройства 8, преобразующего сигнал о действительном положении рабочего органа 7. Второе сравнивающее устройство 10 вырабатывает сигнал, который представляет собой разность сигналов, поступающих на его два входа. Сигнал с выхода сравнивающего устройства 10 подается на вход последовательного корректирующего устройства 4, преобразуется там. Преобразованный сигнал с выхода последовательного корректирующего устройства 4 подается на вход усилителя 5 мощности, усиливается там по мощности. Сигнал с выхода усилителя 5 мощности подается на двигатель 6, который изменяет положение рабочего органа 7 таким образом, чтобы уменьшить рассогласование между требуемым и действительным положением рабочего органа, причем этот процесс должен идти с требуемым качеством.
Опишем математический алгоритм синтеза компенсирующего управления Uв, который реализован блоком 12. Математическую модель системы управления (СУ) и модель возмущений можно представить в виде =D1z+D2y+C1u+F1f, (2)
=D1z+D2y+C1u+F1f, (2) = D3z+D4y+C2u+F2·f, (3)
= D3z+D4y+C2u+F2·f, (3) H·f, (4) где z k-й мерный вектор неизмеряемых координат СУ;
H·f, (4) где z k-й мерный вектор неизмеряемых координат СУ;
y m-мерный вектор измеряемых координат СУ;
f s-мерный вектор возмущений;
u скалярное управление;
D1, D2, D3, D4, C1, C2, F1, F2, H матрицы и векторы соответствующих размерностей.
Внешние и параметрические возмущения аппроксимируются некоторыми функциями, например ступенчатыми, которые рассматриваем как выход некоторой динамической системы. Вид матрицы Н в дифференциальном уравнения (4) (в динамической системе 4) определяется видом аппроксимирующих функций. Так для ступенчатых аппроксимирующих функций Н 0. Координаты вектора f рассматриваем как новые координаты состояния системы управления. Считаем, что система уравнений (2)-(4) идентифицируема, т.е. по вектору наблюдений у и управлению u можно определить векторы z и f. Перепишем систему уравнений (2)-(4) в виде =A1y+A2x+B1u, (5)
=A1y+A2x+B1u, (5) = A3y+A4x+B2u, (6) где хт [fт, zт] (s+k)-мерный вектор; А1, А2, А3, А4, В1, В2 матрицы и векторы соответствующих размерностей. Внешние и параметрические возмущения f идентифицируем с помощью идентификатора Люенбергера. Исходя из представления СУ в виде уравнений (5) и (6), уравнение идентификатора Люенбергера для оценки вектора х можно записать в виде
= A3y+A4x+B2u, (6) где хт [fт, zт] (s+k)-мерный вектор; А1, А2, А3, А4, В1, В2 матрицы и векторы соответствующих размерностей. Внешние и параметрические возмущения f идентифицируем с помощью идентификатора Люенбергера. Исходя из представления СУ в виде уравнений (5) и (6), уравнение идентификатора Люенбергера для оценки вектора х можно записать в виде =(A4+LA2)g+[LA1+A3-(A4+LA2)L]·y+(B2+LB1)u, (7)
=(A4+LA2)g+[LA1+A3-(A4+LA2)L]·y+(B2+LB1)u, (7) =g-Ly, (8) где
=g-Ly, (8) где  оценка вектора х; L весовая матрица (s+k) ˙ m;
оценка вектора х; L весовая матрица (s+k) ˙ m;
g (s+k)-мерный вектор.
Элементы матрицы L выбираются из желаемой скорости стремления к нулю ошибки оценивания вектора х: lx=  -x, т.е. желаемого спектра (собственных значений) матрицы идентификатора (A4+LA2).
-x, т.е. желаемого спектра (собственных значений) матрицы идентификатора (A4+LA2).
Идентификация неизмеряемого внешнего и параметрического возмущения fi в блоке 12 осуществляется по закону
fi=gi- lijyj, i=1,S, (9) где lij элементы матрицы L.
lijyj, i=1,S, (9) где lij элементы матрицы L.
Уравнение (9) представляет собой скалярную запись уравнения (8) для первых s координат вектора  . Переменная идентификатора gi является решением дифференциального уравнения
. Переменная идентификатора gi является решением дифференциального уравнения =
=  dijgj+
dijgj+  mij·yj+Ki·U, i=1,S+K, (10) где dij, mij и ki постоянные коэффициенты.
mij·yj+Ki·U, i=1,S+K, (10) где dij, mij и ki постоянные коэффициенты.
Уравнение (10) представляет собой скалярную запись уравнения (7).
Управление uв, компенсирующее полностью или частично возмущения fj(j 1, s), формируется в блоке 12 согласно закону
UВ=  fi, (11) где Λi постоянные коэффициенты. Они вычисляются из условия динамической компенсации возмущений, которое в нашем случае выглядит так
fi, (11) где Λi постоянные коэффициенты. Они вычисляются из условия динамической компенсации возмущений, которое в нашем случае выглядит так
Ai[B Λ +F] 0, i 0,1,k+m-1, (12) где A 

 ; B
; B  ; F
; F .
.
В случае невозможности выполнить условие (12) (это зависит от вида матриц А, В и F) определяем вектор Λ состоящий из коэффициентов Λi из условия компенсации возмущений в установившемся режиме. Учитывая вид компенсирующего управления (11) и стабилизирующего управления (см. фиг.1), математическую модель СУ (2), (3) можно записать в установившемся режиме в виде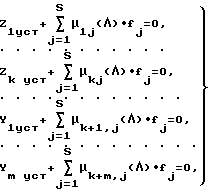 (13) где ziуст (i 1,k), yiуст (i 1,m) значения zi и yi в установившемся режиме; μij коэффициенты, зависящие от Λ Для компенсации ziуст, yiуст требуется, чтобы μij 0 для j 1,s.
(13) где ziуст (i 1,k), yiуст (i 1,m) значения zi и yi в установившемся режиме; μij коэффициенты, зависящие от Λ Для компенсации ziуст, yiуст требуется, чтобы μij 0 для j 1,s.
Функции блока 12 идентификации и формирования сигналов для компенсации возмущений принадлежат к классу функций, для которых известны правила построения реализующих их средств. Блок 12 реализован на операционных блоках электронных схем: сумматорах, интегросумматорах, масштабных усилителях.
На фиг. 2 приведена схема реализации блока 12 идентификации и формирования сигналов для компенсации возмущений. Опишем ее работу.
Функционально эта схема представляет собой техническую реализацию уравнений (9)-(11). Блок 12 включает (s+k) первых групп масштабных усилителей 13, каждая из которых содержит (s+k+m+1) усилителей, s первых интегросумматоров 14 и k вторых интегросумматоров 14, s вторых сумматоров 16, s вторых групп масштабных усилителей 17, третью группу масштабных усилителей 18 в количестве s, третий сумматор 19. На входы первых групп масштабных усилителей 13 с первого по (1+m+s+k)-й подаются соответственно сигналы u, y1,ym, g1,gs+k; коэффициентами усиления будут коэффициенты уравнений (10) ki, mij, die (i 1, s+k; j 1,m; l 1,s+k), т.е. здесь вычисляются слагаемые (с противоположным знаком) правой части уравнений (10). Коэффициенты ki, mij, die предварительно рассчитываются на основе знания математической модели системы управления и выбора модели возмущений (формулы (2)-(4)). Выходы первых групп масштабных усилителей соединены с соответствующими входами s первых и k вторых интегросумматоров. Интегросумматоры осуществляют интегрирование дифференциальных уравнений (10) с нулевыми начальными условиями gi(o) 0, i 1,s+k. С выходов s первых интегросумматоров переменные идентификатора gi (i 1,s) поступают на первые входы соответствующих s вторых сумматоров. На входы второй группы масштабных усилителей, которые объединены с входами с второго по (m+1)-й каждой из первых групп масштабных усилителей, поступают наблюдаемые сигналы СУ: y1,ym; коэффициентами усиления будут коэффициенты уравнения (9) lij (i 1,s; j 1,m). С выходов второй группы масштабных усилителей члены правой части уравнений (9) lij, yj (i 1,s; j 1,m) поступают на входы с второго по (m+1)-й соответствующих вторых сумматоров. Вторые сумматоры, выходы которых подсоединены к соответствующим входам третьей группы масштабных усилителей в количестве s, вычисляют возмущения (с противоположным знаком) fi, i 1,s. Третья группа масштабных усилителей, выходы которых подсоединены к соответствующим входам третьего сумматора, вычисляют члены правой части (с противоположным знаком) уравнения (11) Λi fi, i 1,s. Коэффициенты усиления усилителей Λiпредварительно рассчитываются либо с помощью формулы (12), либо с помощью уравнений (13). Третий сумматор осуществляет суммирование членов правой части (с противоположным знаком) уравнения (11), т.е. вычисляет управление uв, компенсирующее возмущения.
Применение изобретения позволяет увеличить точность следящей системы автоматического управления за счет компенсации неизмеряемых параметрических и внешних возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ АКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1993 |
|
RU2048678C1 |
| ОСКОЛОЧНЫЙ СНАРЯД | 1997 |
|
RU2118790C1 |
| ОСКОЛОЧНО-ФУГАСНЫЙ СНАРЯД (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2018779C1 |
| МАКЕТ БОЕПРИПАСА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ И ВЗРЫВЧАТЫХ ВЕЩЕСТВ НА МЕТАТЕЛЬНО-ДРОБЯЩЕЕ ДЕЙСТВИЕ | 1992 |
|
RU2025646C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОБЕЗВРЕЖИВАНИЯ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 1993 |
|
RU2089826C1 |
| ИМИТАТОР ОСКОЛКА ЕСТЕСТВЕННОГО ДРОБЛЕНИЯ БОЕПРИПАСОВ | 1992 |
|
RU2025644C1 |
| КАССЕТНЫЙ СНАРЯД НАПРАВЛЕННОГО ОСКОЛОЧНОГО ДЕЙСТВИЯ | 1993 |
|
RU2034232C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1992 |
|
RU2032138C1 |
Изобретение относится к системам автоматического управления и может быть использовано при управлении рабочими органами станков, летательных аппаратов и антенных постов. Следящая система содержит задающее устройство 1, первое сравнивающее устройство 2, усилитель 3, последовательное корректирующее устройство 4, усилитель 5 мощности, двигатель 6 и рабочий орган 7, при этом выход задающего устройства 1 подключен к первому входу первого сравнивающего устройства 2, выход усилителя 3 соединен с первым входом второго сравнивающего устройства 10, а выход двигателя 6 через параллельное корректирующее устройство 8 подключен к второму входу второго сравнивающего устройства 10 и через датчик 9 обратной связи к второму входу первого сравнивающего устройства 2. Система содержит также блок 12 идентификации и формирования сигналов для компенсации возмущений, который включает первые группы масштабных усилителей, первые интегросумматоры, вторые интегросумматоры, вторые сумматоры, вторые группы масштабных усилителей, третью группу масштабных усилителей, третий сумматор. 2 ил.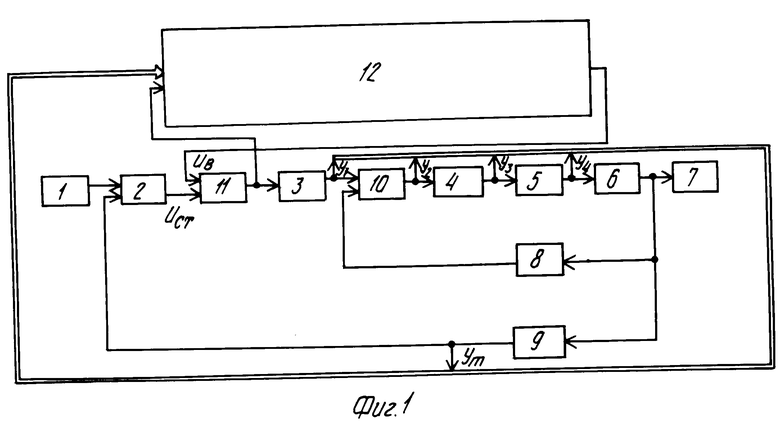
СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ, содержащая задающее устройство, первое сравнивающее устройство, усилитель, параллельное корректирующее устройство, датчик обратной связи, а также последовательно соединенные второе сравнивающее устройство, последовательное корректирующее устройство, усилитель мощности, двигатель и рабочий орган, при этом выход задающего устройства подключен к первому входу первого сравнивающего устройства, выход усилителя соединен с первым входом второго сравнивающего устройства, а выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи к второму входу первого сравнивающего устройства, отличающаяся тем, что в следящую систему введены первый сумматор, первый вход которого подсоединен к выходу первого сравнивающего устройства, выход связан с входом усилителя, блок идентификации и формирования сигналов для компенсации возмущений, включающий s + k первых групп масштабных усилителей, каждая из которых содержит s + k + m + 1 усилителей (где s количество идентифицируемых возмущений, действующих на систему управления (CУ); k количество неизмеряемых координат CУ; m - количество измеряемых координат CУ), выходы которых соединены с соответствующими входами s первых и k вторых интегросумматоров, s вторых групп масштабных усилителей, каждая из которых включает m усилителей, s вторых сумматоров, выходы которых подсоединены к соответствующим входам третьей группы масштабных усилителей в количестве s, выходы последних подсоединены к соответствующим входам третьего сумматора, выход которого подключен к второму входу первого сумматора, выход последнего подключен к первым масштабным усилителям каждой из s + k первых групп масштабных усилителей, входы масштабных усилителей с второго по (m + 1)-й каждой из первых групп объединены с входами соответствующих масштабных усилителей второй группы, а входы масштабных усилителей первой группы с (m + 2)-го по (s + k + m + 1)-й с выходами интегросумматоров соответственно, а выходы s первых интегросумматоров соединены с первыми входами соответствующих s вторых сумматоров, входы которых, начиная с второго по (m + 1)-й, соединены с выходами масштабных усилителей второй группы масштабных усилителей, причем объединенные входы s + k первых групп и s вторых групп масштабных усилителей соединены с выходами соответственно усилителя, второго сравнивающего устройства, последовательного корректирующего устройства, усилителя мощности, датчика обратной связи.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Металлорежущие станки и автоматы./Под ред | |||
| А.С.Проникова | |||
| М.: Машиностроение, с.1981-479. | |||
