Изобретение относится к техническим средствам обучения и может быть использовано для начального обучения, повышения квалификации и тренировки операторов систем управления технологическими процессами.
Известен тренажер оператора систем управления технологическими процессами, содержащий пульт преподавателя, подключенный через коммутатор к пультам обучаемых, блоки моделирования реальных процессов, блоки задания возмущений, соединенные с пультом преподавателя и блоками моделирования реальных процессов, блоки анализа процесса, блоки анализа управляющих воздействий обучаемых, блоки отображения информации, подключенные к соответствующим пультам обучаемых, блокам анализа процесса и управляющих воздействий обучаемых (авт. св. СССР N 629544, кл. G 09 В 9/00, 11.08.76).
Недостаток известного тренажера заключается в низком качестве обучения вследствие ограниченных возможностей моделирования, так как построение и реализация адекватных математических моделей технологических процессов во всем диапазоне варьирования управляющих и возмующающих воздействий является сложной, а зачастую, и нереализуемой задаей. Применение неадекватных моделей приводит к низкому качеству моделирования и, как следствие, низкому качеству обучения. Кроме того, в известном тренажере не предусмотрена возможность обучения на реальных типовых ситуациях, представленных натурными данными.
Наиболее близким по технической сущности и достигаемому результату к изобретению является тренажер оператора систем управления технологическими процессами (авт. св. СССР N 1208571, кл. G 09 В 9/00, 01.12.83), содержащий пульт преподавателя, последовательно соединенные пульт обучаемого, первый блок сравнения, первый ключ, первую модель канала регулирования, первый сумматор и второй блок сравнения, последовательно соединенные блок задания возмущений, третий блок сравнения, второй дополнительный ключ, модель канала преобразования возмущений, последовательно соединенные первый и второй переключатели, блок отображения информации, блоки запоминания натурных управлений, возмущений, заданий и выходов, причем пульт преподавателя соединен выходами с входами пульта обучаемого, первого ключа, блока задания возмущений, блоков запоминания натурных управлений, возмущений, заданий и выходов, второго дополнительного ключа, первого и второго переключателей, выходы пульта обучаемого соединены с входом второго переключателя, выходы блоков запоминания натурных управлений, возмущений и выходов соединены с входами второго переключателя, к котторому подсоединен выход второго блока сравнения, второй вход первого блока сравнения соединен с выходом блока запоминания натурных управлений, второй вход второго блока сравнения соединен с выходом блока запоминания натурных выходов, второй вход третьего блока сравнения соединен с выходом блока запоминания натурных возмущений, выход модели канала преобразования возмущений соединен с входом первого сумматора, выходы второго переключателя соединены с входами блока отображения информации.
Недостаток известного тренажера заключается в его ограниченных функциональных возможностях. Это связано с тем, что обучение осуществляется при натурных значениях управлений, заданий и выходов, отражающих, как правило, режимы нормального функционирования технологического процесса или близкие к ним режимы, тогда как очевидна необходимость обучения операторов в режимах технологии, имитирующих разнообразные аварийные или предаварийные ситуации. Другой недостаток заключается в низкой эффективности обучения, что связано со сложностью получения объективной оценки качества управления и обучения. Для получения такой оценки необходимо иметь некоторые базовые (образцовые) решения, относительно которых следует оценивать качество работы обучаемых операторов. Натурные данные в общем случае не могут служить объективной основой для оценки качества управления и обучения, так как даже предварительно отобранные "хорошие" натурные данные могут являться результатом деятельности не только операторов-производственников, но и взаимодействующих с ними автоматизированных систем управления, реализующих сложные алгоритмы управления, для оценки качества работы которых требуются специальные эксперименты или моделирующие контуры на действующем объекте.
Цель изобретения - расширение функциональных возможностей и повышение эффективности обучения.
Цель достигается тем, что в тренажер содержащий пульт преподавателя, пульт обучаемого, первый ключ, первый блок сравнения, последовательно соединенные первую модель канала регулирования, первый сумматор и второй блок сравнения, последовательно соединенные блок задания возмущений, третий блок сравнения, второй ключ и модель канала преобразования возмущений, также содержащий переключатель видов возмущений, блок отображения информации, блоки запоминания натурных управлений, возмущений, заданий и выходов, причем пульт преподавателя первым, вторым, третьим, четвертым и пятым выходами соединен соответственно с входом пульта обучаемого, с первым входом первого ключа, вторым входом второго клюач, входом блока задания возмущений и первым входом переключателя видов возмущений, второй вход третьего блока сравнения соединен с выходом блока запоминания натурных возмущений, выход модели канала преобразования возмущений соединен с вторым входом первого сумматора, введены генераторы ошибок реализации управления и ошибок измерения выходов, блок изменения заданий, второй, третий, четвертый и пятый сумматоры, вторая и третья модели каналов регулирования, четвертый и пятый блоки сравнения, первый и второй блоки оценки эффективности, третий, четвертый, пятый и шестой ключи и образцовая управляющая система, при этом генератор ошибок реализации управлений через вторую модель канала регулирования соединен с первым входом четвертого сумматора, второй и третий входы которого соединены соответственно с выходом генератора ошибок измерения выходов и выходом блока запоминания натурных выходов, выход блока изменения заданий соединен с первым входом третьего сумматора, второй вход которого соединен с выходом блока запоминания натурных заданий, выход генератора ошибок реализации управлений соединен также с первым входом второго сумматора, с вторым входом которого соединен выход блока запоминания натурных управлений, входы блоков натурных управлений, натурных возмущений, натурных заданий и натурных выходов соединены через шестой ключ с шестым выходом пульта преподавателя, пульт обучаемого через второй вход первого ключа соединен с первым входом первого блока сравнения, с вторым входом которого соединен выход второго сумматора, выход первого блока сравнения соединен с входом первой модели канала регулирования, образцовая управляющая система через первый вход пятого блока сравнения, третью модель канала регулирования и первый вход пятого сумматора соединена с первым входом четвертого блока сравнения, второй вход которого соединен с выходом четвертого сумматора, выход четвертого блока сравнения соединен с первыми входами образцовой управляющей системы, пятого ключа, первого блока оценки эффективности и четвертого ключа, второй вход второго блока сравнения соединен с выходом четвертого сумматора, а выход второго блока сравнения соединен с вторым входом пятого ключа, второй вход пятого сумматора соединен с выходом модели канала преобразования возмущений, выход образцовой управляющей системы также соединен с третьим входом пятого ключа, вторыми входами первого блока оценки эффективности и четвертого ключа, второй вход пятого блока сравнения соединен с выходом второго сумматора, выход третьего сумматора соединен с вторым входом образцовой управляющей системы и с первым входом блока отображения информации, второй и третий входы которого соединены соответственно с первым и вторым выходами четвертого ключа, четвертый и пятый входы блока отображения информации соединены соответственно с выходом первого блока оценки эффективности и с седьмым выходом пульта преподавателя, восьмой выход которого соединен с третьим входом образцовой управляющей системы, шестой вход блока отображения информации соединен с выходом переключателя видов возмущений, который соединен также с четвертым входом образцовой управляющей системы, седьмой вход блока отображения информации соединен с выходом первого ключа, который соединен также с первым входом второго блока оценки эффективности, выход которого соединен с восьмым входом блока отображения информации, девятый вход блока отображения информации соединен с первым выходом пятого ключа, который соединен также с вторым входом второго блока оценки эффективности, третий и четвертый входы которого соединены с вторым и третьим выходами пятого ключа, десятый и одиннадцатый входы блока отображения информации соединены с первым и вторым выходами третьего ключа, первый и второй входы которого соединены с выходами соответственно второго и четвертого сумматоров, второй и третий входы переключателя видов возмущений соединены соответственно с выходом блока задания возмущений и выходом блока запоминания натурных возмущений, третий и четвертый входы первого блока оценки эффективности соединены с выходами второго и четвертого сумматоров, седьмой выход пульта преподавателя соединен также с четвертым входом образцовой управляющей системы, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый и четырнадцатый выходы пульта преподавателя соединены соответственно с входами генератора ошибок реализации управлений, блока изменения задания, генертатора ошибок измерения выходов, с третьими входами третьего и четвертого ключей и четвертым входом пятого ключа.
С введением образцовой управляющей системы, первого и второго блоков оценки эффективности, блока изменения заданий, генераторов ошибок управлений и ошибок измерения выходов, второй и третьей моделей каналов регулирования, второго, третьего, четвертого и пятого сумматоров, четвертого и пятого блоков сравнения, третьего, четвертого, пятого и шестого ключей предлагаемый тренажер оператора приобретает существенно новые (по сравнению с известными тренажерами для обучения путем моделирования операторов систем управления) свойства, а именно позволяет осуществлять обучение операторов в сопоставлении с нормативными решениями, вырабатываемыми образцовой управляющей системой, что обеспечивает эффективное усвоение алгоритмов функционирования образцовой управляющей системы и способствует быстрому и качественному формированию навыков управления технологическими процессами. Кроме того, введение блоков изменения заданий, генераторов ошибок управлений и ошибок измерения выходов с соответствующими моделями, сумматорами и блоками сравнения обеспечивает более широкие возможности обучения за счет воспроизведения путем моделирования режимов, отличающихся от натурных-аварийных, с имитацией разнообразных ошибок управления и контроля, а также режимов с новыми технологическими заданиями на выходные переменные. При этом возможно качественное изменение содержания процесса обучения за счет введения таких дополнительных осваиваемых функций, как, например, выделение полезных составляющих выходных переменных на фоне высокочастотных ошибок их измерения.
На основании этого считают, что предлагаемое техническое решение соответствует критерию изобретения "существенные отличия", так как отличительные от прототипа и аналогов признаки, известные в технике, проявляют в предлагаемом решении новые свойства, а именно обеспечивают повышение эффективности обучения, т. е. сокращение сроков обучения и повышение его качества, а также расширение возможностей процесса обучения за счет модельного воспроизведения режимов технологии, отличающихся от натурных, введения новых функций по управлению для освоения их обучаемыми.
На фиг. 1 изображена структурная схема тренажера оператора систем управления технологическими процессами; на фиг. 2 и 3 - структурные схемы первого и второго блоков оценки эффективности; на фиг. 4 - структурная схема образцовой управляющей системы; на фиг. 5 - схема переключателя видов возмущений; на фиг. 6 - схема третьего ключа.
Тренажер оператора систем управления технологическими процессами содержит (фиг. 1) блок 1 запоминания натурных управлений, блок 2 запоминания натурных возмущений, блок 3 запоминания натурных заданий, блок 4 запоминания натурных выходов, пульт 5 обучаемого, пульт 6 предподавателя, генератор 7 ошибок реализации управлений, генератор 8 ошибок измерения выходов, блок 9 изменения заданий, блок 10 задания возмущений, первую 11, вторую 12 и третью 13 модели каналов регулирования, модель 14 канала преобразования возмущений, первый 15, второй 16, третий 17, четвертый 18 и пятый 19 сумматоры, первый 20, второй 21, третий 22, четвертый 23 и пятый 24 блоки сравнения, первый 25 и второй 26 блоки оценки эффективности, блок 27 отображения информации, переключатель 28 видов возмущений, первый 29, второй 30, третий 31, четвертый 32, пятый 33 и шестой 34 ключи, образцовую управляющую систему 35.
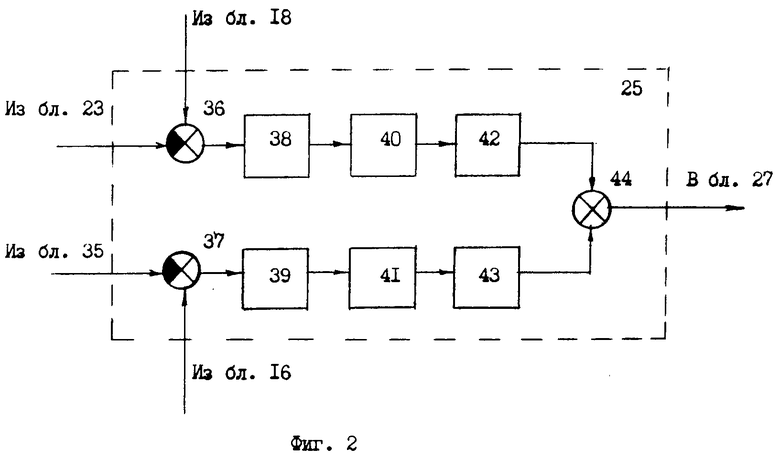
Первый блок 25 оценки эффективности состоит (фиг. 2) из шестого 36 и седьмого 37 блоков сравнения, первого 38 и второго 39 квадраторов, первого 40 и второго 41 интеграторов, первого 42 и второго 43 масштабирующих блоков, шестого сумматора 44.
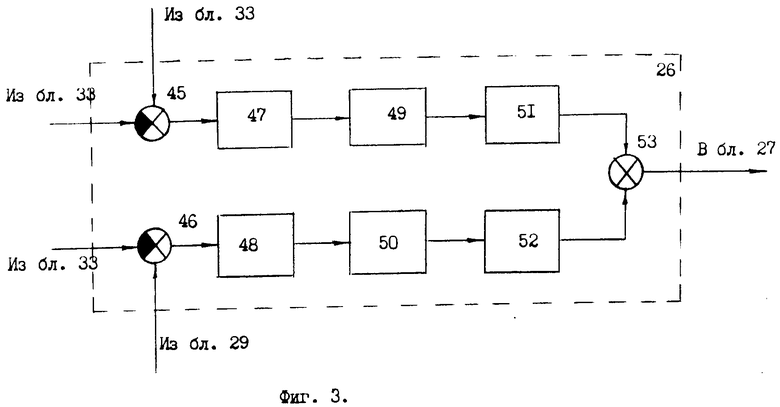
Второй блок 26 оценки эффективности состоит (фиг. 3) из восьмого 45 и девятого 46 блоков сравнения, третьего 47 и четвертого 48 квадраторов, третьего 49 и четвертого 50 интеграторов, третьего 51 и четвертого 52 масштабирующих блоков, шестого сумматора 53.
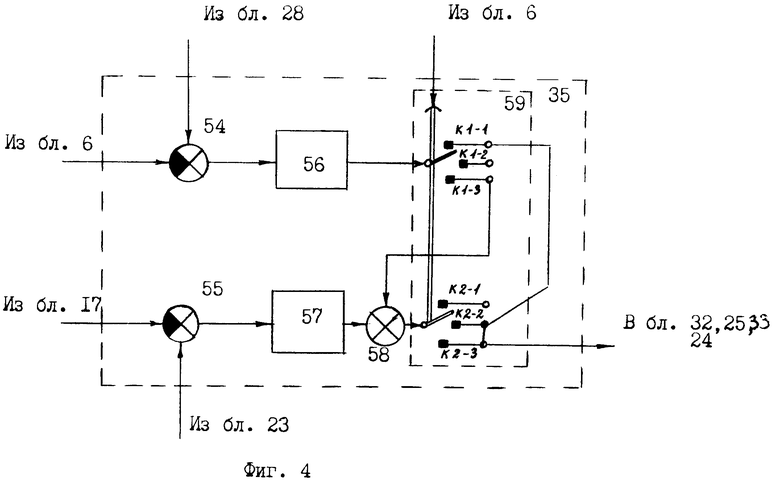
Образцовая управляющая система 35 состоит (фиг. 4) из десятого 54 и одиннадцатого 55 блоков сравнения, регулятора 56 по возмущению, регулятора 57 обратной связи, седьмого сумматора 58, переключателя 59.
Блоки 1,2, 3 и 4 запоминания натурных управлений, возмущений, заданий и выходов, генератор 7 ошибок реализации управлений, генератор 8 ошибок измерения выходов и блок 10 задания возмущений могут быть реализованы, например, на базе запоминающих устройств на магнитной ленте (магнитофонов). Блок 9 изменения заданий реализован может быть в виде, например, ручного дистанционного задатчика, применяемого в системах автоматики. Пульт 5 обучаемого содержит, например, такой же, как и в блоке 9, ручной дистанционный задатчик и световое табло индикации режима работы с двумя надписями "Режим пассивного обучения" и "Режим активного обучения". Пульт 6 преподавателя содержит органы управления переключателем 28, ключами 29-33, световым табло на пульте обучаемого. Эти органы управления могут быть выполнены, например, в виде кнопок или ключей включения-выключения реле, контакты которых выполняют функции переключателей или ключей. Кроме того, пульт 6 преподавателя содержит ручной дистанционный задатчик, аналогичный рассмотренным выше и предназначенный для ввода опорных значений возмущений в образцовую управляющую систему 35. С пульта 6 осуществляется также управление переключателем 59 системы 35. Переключатель 59 встроен в систему 35, которая может располагаться в пределах досягаемости преподавателя, работающего за пультом 6.
Образцовая управляющая система 35 реализована по типу комбинированной управляющей системы, выполняющей совместно регулирование по возмущению и по обратной связи (см. Цыпкин Я. З. Основы теории автоматических систем. М. : Наука, 1977, с. 80, рис. 6.5), дополненной переключателем 59 выбора режимов работы (регулирования) образцовой управляющей системы. Техническая реализация образцовой управляющей системы может быть выполнена, например, согласно схеме регулятора по авт. св. СССР N 815713, кл. G 05 В 13/02, 12.01.79. Один из частных вариантов реализации образцовой управляющей системы 35 рассмотрен ниже при описании работы тренажера.
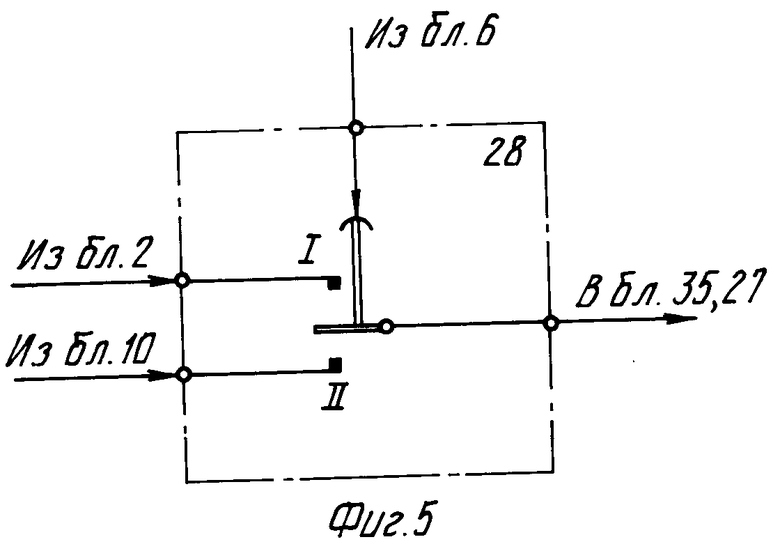
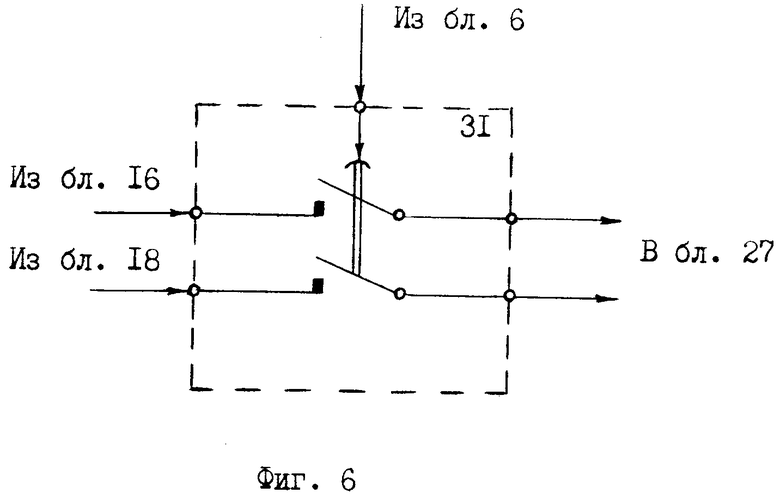
Переключатели и ключи, входящие в состав тренажера, обеспечивают взаимодействие блоков тренажера в различных режимах обучения и моделирования. Переключатель 28 вида возмущений (фиг. 5) имеет два рабочих положения (I и II). Положение I соответствует режиму моделирования с натурными возмущениями, когда на вход образцовой управляющей системы 35 и на вход блока 27 отображнеия информации поступают через этот переключатель натурные возмущения из блока 2 запоминания натурных возмущений. Положение II соответствует режиму моделирования с возмущениями произвольного вида (натурно-модельными), которые вводятся в моделирующую схему (и через переключатель 28 в блоки 35 и 27) из блока 10 задания возмущений.
Первый ключ 29 предназначен для отключения пульта 5 обучаемого от входов моделирующей схемы в режиме пассивного обучения. Шестой ключ 34 предназначен для синхронного запуска блоков запоминания натурных управлений 1, натурных возмущений 2, натурных заданий 3 и натурных выходов 4 по команде с пульта 6 преподавателя. Третий ключ 31 (фиг. 6) предназначен для подключения натурных или измененных (натурно-модельных) управлений и выходов к блоку 27 оттображения информации. Четвертый ключ 32 предназначен для подключения управляющих воздействий образцовой управляющей системы 35 и соответствующих им модельных образцовых выходов объекта управления из блока 23 к входу блока 27 отображения информации. Пятый ключ 33 предназначен для подключения выходов блоков 21, 23, 35 к второму блоку 26 оценки эффективнотсти, где оценивается качество регулирования обучаемого, и выхода блока 21 дополнительно к входу блока 27 отображения информации.
Ключи 29-34 могут быть реализованы в виде нормально разомкнутых контактов электрических реле, которые включаются с пульта 6 преподавателя. Переключатель 28 может быть реализован в виде, например, поляризованного реле, также управляемого с пульта преподавателя.
Переключатель 59 образцовой управляющей системы 35 представляет собой галетный переключатель (фиг. 4) с двумя группами контактов (К1 и К2) на каждом поле. Каждая контактная группа имеет по три контакта, обозначенные К1-1, К1-2, К1-3 и К2-1, К2-2, К2-3 соответственно для первой (К1) и второй (К2) групп. Переключатель 59 позволяет организовать три режима работы системы 35: при замыкании контактов К1-1, К2-1 - регулирование по возмущению, при замыкании контактов К1-2, К2-2 - регулирование по обратной связи, при замыкании контактов К1-3, К2-3 - комбинированное регулирование. Переключатель 59 переключается в требуемое положение преподавателем вручную и позволяет демонстрировать обучаемому за счет изменения схемы подключения регуляторов 56 и 57 эффективность различных принципов регулирования.
Первая 11, вторая 12 и третья 13 модели каналов регулирования реализованы каждая в виде, например, последовательного соединения блока сравнения, интегратора и звена задержки, причем выход интегратора соединен также с вторым входом блока сравнения, т. е. в виде инерционного звена первого порядка с запаздыванием с передаточной функцией вида
ϕи(p)=  , (1) где ku, Т и τ - коэффициент передачи по каналу управление - выход, постоянные времени инерции и запаздывания.
, (1) где ku, Т и τ - коэффициент передачи по каналу управление - выход, постоянные времени инерции и запаздывания.
Модель 14 канала преобразования возмущений реализована, например, в виде пропорционального звена с передаточной функцией вида
ϕω(p)= kω, (2) где kω - коэффициент передачи по каналу возмущение - выход.
Модели каналов регулирования, модель канала преобразования возмущений, сумматоры, блоки сравнения, интеграторы, масштабирующие блоки могут быть реализованы, например, на базе стандартных операционных элементов аналоговой вычислительной техники (см. Тетельбаум И. М. , Шнейдер Ю. Р. Практика аналогового моделирования динамических систем. : Справочное пособие. - М. : Энергоатомиздат, 1987, с. 22, табл. В. 3; с. 74; табл. 1.3; с. 107, раздел 1.8).
Квадраторы могут быть реализованы, например, в виде схемы на с. 124, рис. 2.7 (см. предыдущую книгу).
Блок 27 отображения информации реализован, например, в виде графического дисплея, одного или нескольких многоточечных самопишущих приборов или группы одноточечных регистрирующих приборов по числу контролируемых и отображаемых параметров (см. Андреев А. А. Автоматические показывающие, самопишущие и регулирующие приборы. М. : Машиностроение, 1973, с. 125, рис. 37).
Устройство тренажера обеспечивает параллельное функционирование двух модельно-замкнутых управляющих систем: обучаемого, действующего через пульт 5 обучаемого, и образцовой управляющей системы 35. Управляющие воздействия обучаемого замыкаются через первую модель 11, управляющие воздействия образцовой управляющей системы 35 замыкаются через модель 13.
Образцовая управляющая система 35 в зависимости от задачи обучения может работать в режиме комбинированного регулирования, в режиме регулирования по обратной связи, в режиме регулирования по возмущению. Требуемый режим выбирается переключателем 59.
Тренажер обеспечивает возможность реализации различных режимов моделирования.
Моделирование при натурных возмущениях ω, управлениях U, заданиях y* и выходах y. Переключатель 28 установлен в положение I. На блок 27 отображения информации, в образцовую управляющую систему 35, на входы блоков 20, 21, 23 и 24 сравнения поступают без изменения данные из блоков 1,2,3 и 4. Генераторы 7 и 8 выключены. Блок 9 изменения заданий установлен в среднее (нулевой выход) положение. Вход модели 14 отключен от источников 2 и 10 возмущений вторым ключом 30.
Моделирование при заданных возмущениях ω*. Переключатель 28 установлен в положение II. Модель 14 канала преобразования возмущений подключена к входам источников возмущений через третий блок 22 сравнения ключом 30. Преподаватель с пульта 6 включает блок 10 задания возмущений. С его выхода поступает на вход третьего блока 22 сравнения возмущение требуемого вида ω* (заданное возмущение). Этот же сигнал ω* через переключатель 28 поступает на блок 27 отображения информации. На второй вход третьего блока 22 сравнения поступает сигнал о натурных возмущениях ω с выхода блока 2. На выходе блока 22 формируется разность δω= ω-ω*, которая поступает на модель 14 канала преобразования возмущений, где происходит преобразование δω в масштаб выходной величины объекта δyωмпо правилу
δy
Режим моделирования с генерацией ошибок реализации управлений. В этом режиме с пульта 6 преподавателя запускается генераторт 7 ошибок реализации управлений, где записаны или формируются сигналы, имитирующие ошибки управления εи с желаемыми свойствами. Во втором сумматоре 16 ошибки управления εи с выхода генератора 7 суммируются с натурными управлениями U из блока 1 запоминания натурных управлений, образуя сигнал
UНМ(t)= U(t)+εи(t). (4)
Сигнал Uнм(t) является натурно-модельным, т. е. измененным целенаправлено по отношению к натурному управляющему воздействию U.
Сигнал εи поступает также на вход второй модели 12 канала регулирования, где формируется корректировка δyUε (t) выходной величины объекта на величину ошибок управления по правилу
δy
Сигнал δyиε (t) суммируется в четвертом сумматоре 18 с натурным значением y(t) выхода объекта из блока 4. Величина yε,инм(t)= y(t)+ δyиε (t) показывает, каким было бы значение выходной величины объекта, если управляющее воздействие U было бы реализовано с ошибкой εи в момент времени t.
Режим моделирования с генерацией ошибок измерения выходов. В этом режиме с пульта 6 преподавателя запускается генераторт 8 ошибок измерения выходов εy(t) и в четвертом сумматоре 18 формируется натурно-модельный сигнал yε,yнм(t) = y(t)+ εy(t), показывающий, каким было бы значение выхода объекта при его измерении с ошибкой εy.
Режим моделирования с изменением заданий на выход объекта. В этом режиме с пульта 6 преподаватель через блок 9 изменения заданий устанавливает требуемую корректировку δ y* натурного задания y* на выходную величину, записанную в блоке 3, в результате чего в блок 27 отображения информации и в образцовую управляющую систему 35 поступает новое задание y**(t)= y*(t)+ δ y*(t), которое формируется в третьем сумматоре 17.
Режимы моделирования, кроме первого, могут быть реализованы все одновременно или в любой комбинации. Выбор режимов моделирования не зависит от режимов работы образцовой управляющей системы 35, т. е. все перечисленные режимы моделирования могут быть реализованы как при работе системы 35 в режиме комбинированного регулирования, так и в режимах регулирования по обратной связи или по возмущениям.
Обучение оператора с помощью данного тренажера может осуществляться в двух режимах: пассивного обучения и активного обучения.
Режим пассивного обучения.
Обучение осуществляется путем наблюдения обучаемым за натурными или измененными натурно-модельными данными и работой образцовой управляющей системы 35. Активное уравление обучаемым не производится. Выход пульта 5 обучаемого отключается ключом 29 от входа моделирующей схемы (блок 20) и блока 27 отображения информации. Размыкание ключа 29 осуществляется с пульта 6 преподавателя. С этого же пульта включается табло на пульте 5 обучаемого "Режим пассивного обучения". Выход модельного объекта регулирования обучаемого отключается от второго блока 26 оценки эффективности и блока 27 отображения информации путем размыкания контактов ключа 33. Этим же ключом оттключаются от блока 26 выход системы 35 и выход блока 23 (выход моделирующей схемы системы 35). Второй блок 26 оценки эффективности не работает. К входам блока 27 отображения информации оказываются подключенными через переключатель 28 натурные (из блока 2) или заданные (из блока 10) возмущения; опорные значения возмущений, вводимые с пульта 6 преподавателя; оценка эффективности натурных управлений из первого блока 25 оценки эффективности; образцовые управления и выходы из блоков 35 и 23 соответственно через четвертый ключ 32; натурные или натурно-модельные управления и выходы из сумматоров 16 и 18 соответственно через третий ключ 31; натурные или измененные задания с выхода сумматора 17.
Преподаватель с пульта 6 запускает через шестой ключ 34 блоки запоминания натурных управлений 1, возмущений 2, заданий 3 и выходов 4. В зависимости от выбранного режима моделирования включает или не включает генератор 7 ошибок реализации управлений и генератор 8 ошибок измерения выходов, корректирует при необходимости задание через блок 9. Переключатель 28 устанавливается в требуемое положение. Если выбран режим моделирования с заданными возмущениями, то дополнительно включается блок 10 задания возмущений с пульта 6 преподавателя. Ключом 59 задается режим работы образцовой управляющей системы 35 - комбинированное регулирование, регулирование по обратной связи, регулирование по возмущению.
В этом режиме на блоке 27 отображения информации обучаемому демонстрируются натурные или натурно-модельные данные в сопоставлении с образцовыми решениями. Обучаемый, наблюдая за ними, учится принимать решения в конкретных производственных ситуациях, записанных в блоках 1-4 или смоделированных с помощью блоков 7-10 и соответствующих моделей 12 и 14.
Режим активного обучения.
В этом режиме обучаемый оператор осуществляют непосредственное управление моделируемым объектом, воздействуя на модель 11, и наблюдает за реакцией объекта на свои воздействия. Как и в режиме пассивного обучения, в этом режиме работает образцовая управляющая система 35 и оператор имеет возможность сопоставлять результаты своей деятельнотсти с образцовыми результатами, которые вырабатываются в системе 35.
Для работы в этом режиме обучения преподаватель с пульта 6 выполняет следующие действия: ключом 29 подключает пульт 5 обучаемого входу модельного объекта управления обучаемого (вход блока 20 сравнения), к входу второго блока 26 оценки эффективности и к входу блока 27 отображения информации; ключом 33 подключает выход модельного объекта управления обучаемого (выход блока 21) к входу второго блока 26 оценки эффективности и к входу блока 27 отображения информации; этим же ключом к блоку 26 подключаются образцовые управления и выходы из блоков 35 и 23 соответственно; на пульте 5 обучаемого включается табло "Режим активного обучения".
К входам блока 27 отображения информации дополнительно к перечисленному в описании режима пассивного обучения теперь оказываются подключенными управляющие воздействия обучаемого с выхода пульта 5 обучаемого через ключ 29, выход модельного объекта управления обучаемого с выхода блока 21 через ключ 33, оценка эффективности деятельности обучаемого с выхода второго блока 26 оценки эффективности.
В зависимости от задачи обучения преподавателем с пульта 6 от блока 27 отображения информации могут быть отключены в любой комбинации группы переменных: натурные или натурно-модельные управления и выходы из сумматоров 16 и 18 ключом 31, образцовые управления и выходы из блоков 35 и 23 ключом 32. Это, например, необходимо сделать на заключительных этапах обучения, когда обучаемый должен работать совершенно самостоятельно без какой-либо подсказки, в качестве которой могут быть использованы натурные данные и данные работы образцовой системы, затем преподаватель с пульта 6 устанавливает переключателем 28 требуемый режим воспроизведения возмущений. Если переключатель установлен в положение II (заданные возмущения), то запускается блок 10 задания возмущений. Переключателем 59 выбирается режим работы системы 35. Запускаются через ключ 34 блоки 1-4 запоминания натурных данных и при необходимости в зависимости от выбранного режима моделирования генераторы 7 и 8.
Обучаемый, наблюдая за показаниями приборов блока 27 отображения информации, принимает решение по управлению процессом и реализует его с помощью ручного дистанционного задатчика, установленного на пульте 5 обучаемого. С выхода задатчика сигнал Uм поступает на вход первого блока 20 сравнения, на второй вход которого поступает сигнал о натурном U или натурно-модельном Uнм управляющем воздействии из сумматора 16. Далее для удобства изложения рассмотрим режим моделирования с натурными данными.
В блоке 20 формируется сигнал разности
δUм(t)= U(t)-Uм(t), (6) который поступает на вход первой модели 11 канала регулирования, где формируется реакция модели
δy
Сигнал δyиМ проходит без изменения через сумматор 15 и поступает на вход второго блока 21 сравнения, на второй вход которого поступает сигнал о натурном выходе y из сумматора 18.
В блоке 21 формируется модельное значение выходной величины
yм(t)= y(t)- δyим(t), (8) которая показывает, что было бы на объекте, если вместо натурных управляющих воздействий U(t) были реализованы воздействия обучаемого Uм(t).
Сигнал yм с выхода блока 21 через ключ 33 поступает во второй блок 26 оценки эффективности и в блок 27 отображения информации, и процесс управления продолжается, пока не будет решена поставленная задача обучения.
Если, например, обучение идет при заданных возмущениях, то сигнал δyм из модели 11 суммируется с сигналом δyωм из модели 14 в сумматоре 15, а модельное значение выходной величины в этом случае равно
y
Если обучение осуществляется в режиме моделирования с генерацией ошибок измерения выходов εy, то в выражениях (8) и (9) вместо величины y будет зайдействована величина yε,yнм(t)= y(t)+ εy(t).
Если обучение ведется в режиме моделирования с генерацией ошибок реализации управления εи, то выражение (6) записывается так:
δUм(t)= Uнм(t)-Uм(t), (10) где Uнм(t)= U(t)+ εи (t), а выражения (8) и (9) имеют соответственно вид
yМ(t)= y(t)-δy
yМ(t)= y(t)-[δy
Конкретный вид формул для расчета yм определяется выбранной комбинацией режимов управления, которые были охарактеризованы выше.
Параллельно с обучаемым работает образцовая управляющая система 35, замкнутая на своей модельный объект. Работу образцовой управляющей системы 35 рассмотрим последовательно по режимам управления.
В режиме управления (регулирования) по возмущению к выходу системы 35 через переключатель 59 подключен только выход регулятора 56 по возмущению. Связь между регуляторами 56 и 57 отсуствует. На его вход поступает сигнал δω= ω-ωo, формируемый в блоке 54 сравнения и равный разности между натурным ω (из переключателя 28) и опорным ωo (из пульта 6) значениями возмущения. Если моделирование ведется по заданным возмущениям ω*, то δω= ω*-ωo. Регулятор 56 по возмущению может быть реализован, например, в виде пропорционального звена с настроечным коэффициентом kр,w. Тогда на его выходе формируется управляющее воздействие
U
При регулировании по обратной связи к выходу системы 35 подключен через переключатель 59 только выход регулятора 57 обратной связи, который реализует, например, следующий алгоритм:
U y
y , (14) где y0 - образцовое модельное значение выходной переменной, соответствующее образцовым управлениям Uy0; y* - задание, поступающее из сумматора 17 (натурное или измененное);
, (14) где y0 - образцовое модельное значение выходной переменной, соответствующее образцовым управлениям Uy0; y* - задание, поступающее из сумматора 17 (натурное или измененное);
kр,y - настроечный коэффициент регулятора обратной связи. Разность [y0(t- τ)-y*(t)] формируется в блоке 55 сравнения.
Сигнал Uy0(t) проходит через переключатель 59 на выход системы 35.
При комбинированном регулировании формируется суммарное управляющее воздействие
U0(t)= Uw0(t)+U0y(t), (15) где Uw0(t)и Uy0(t) - управляющие воздействия, сформированные регуляторами по возмущению 56 и обратной связи 57.
Моделирование с целью оценки эффектов образцовых управлений осуществляется следующим образом.
Управляющее воздействие, например, U0(t) поступает на пятый блок 24 сравнения, в котором формируется разность, например, вида
δU0(t)= U(t)-U0(t), (16) где U - натурное управление (в общем случае вместо U может использоваться натурно-модельное управление Uнм).
Сигнал δ U0(t) поступает на модель 13, где формируется реакция модели
δy
Далее в сумматоре 19 и блоке 23 сравнения формируется модельный выход y0(t) образцовой управляющей системы аналогично модельному выходу обучаемого. Уравнения, описывающие этот процесс, для основных режимов моделирования имеют вид при использовании только натурных данных
y0(t)= y(t)- δ yи0(t); (18)
при моделировании с заданными возмущениями
y0(t)= y(t)- y
y ; (19)
; (19)
в режиме моделирования с генерацией ошибок управления
y0(t)= y(t)-δy
в режиме моделирования с генерацией ошибок измерения выходов
y0(t)= y(t)-εy(t)-δy
Уравнения, описывающие процесс формирования выхода y0(t) при комбинации режимов, получаются из уравнений (18)-(21) путем комбинации составляющих их правых частей.
Выход y0(t) поступает из блока 23 в блоки 26 и 25 оценки эффективности, на блок 27 отображения информации и на вход регулятора 57 образцовой управляющей системы 35.
Сигнал y0(t) показывает, что было бы на выходе объекта управления, если бы вместо, например, натурных управлений U были реализованы управляющие воздействия U0(t) образцовой управляющей системы 35.
Сигналы U0(t) и y0(t) служат базой для оценок эффективности управления натурным объектом и обучаемым, которые формируются соответственно в первом 25 и втором 26 блоках оценки эффективности. В первом блоке 25 оценки эффективности оценивается качество управления на натурном объекте в сопоставлении с образцовыми выходами y0 и управлениями U0 по следующему алгоритму:
QН(t)= γ1 [y(t)-y0(t)] 2dt+
[y(t)-y0(t)] 2dt+ [U(t)-U0(t)] 2dt, (22) где Qн(t) - оценка качества натурного управления; y(t) и U(t) - натурные выходы и управления; y0(t) и U0(t) - образцовые выходы и управления; γ1, γ2 - настраиваемые коэффициенты первого 42 и второго 43 масштабирующих блоков; γ1+γ2 = 1, например; пределы интегрирования: 0 - начало работы, Т - момент окончания управления, соответствующее началу и концу участка натурных данных.
[U(t)-U0(t)] 2dt, (22) где Qн(t) - оценка качества натурного управления; y(t) и U(t) - натурные выходы и управления; y0(t) и U0(t) - образцовые выходы и управления; γ1, γ2 - настраиваемые коэффициенты первого 42 и второго 43 масштабирующих блоков; γ1+γ2 = 1, например; пределы интегрирования: 0 - начало работы, Т - момент окончания управления, соответствующее началу и концу участка натурных данных.
Во втором блоке 26 оценки эффективности оценивается качество управления, которое достигается обучаемым, также относительно образцовых выходов и управлений. Блок 26 реализует следующий алгоритм:
QM(t)= γ1 [yМ(t)-y0(t)] 2dt+
[yМ(t)-y0(t)] 2dt+ [UM(t)-U0(t)] 2dt, где Qм(t) - оценка качества управления обучаемого;
[UM(t)-U0(t)] 2dt, где Qм(t) - оценка качества управления обучаемого;
yм(t) и Uм(t) - его управляющие воздействия и соответствующие им выходы; γ1, γ2 - коэффициенты третьего 51 и четвертого 52 масштабирующих блоков, равные коэффициентам γ1и γ2 из выражения (22).
Оценки качества управления Qн(t) и Qм(t) поступают в блок 27 отображения информации и служат основой для стимулирования обучаемого, для управления процессом обучения, например, путем изменения сложности задач управления, изменения темпа воспроизведения участков данных и т. п.
Применение предлагаемого тренажера для обучения операторов систем управления технологическими процессами, в частности, в металлургической промышленности позволило по сравнению с прототипом более чем в два раза сократить срок обучения. Темп формирования навыков управления с применением предлагаемого тренажера соответствует примерно экспоненциальной кривой с переходным периодом от начала обучения до установившегося качества управления в 150-200 плавок для конвертера и 50-70 выпусков для доменной печи. При обучении с применением тренажера-прототипа, выбранного в качестве базового объекта, эти цифры составляют соответственно 300-350 плавок и 70-120 выпусков.
К концу срока обучения качество управления обучаемых на предлагаемом тренажере составило 0,75 ед. от достигнутого на натурном объекте против 0,35 ед; при обучении с использованием тренажера-прототипа.
Кроме того, применение предлагаемого тренажера позволило провести обучение оператора не только на натурных режимах, но и воспроизводить отличающиеся от натурных режимы, например аварийные и с имитацией различного рода ошибок управления, и обучать операторов действиям в этих режимах с моделированием и демонстрацией обучаемым результатов их деятельности, что обеспечило расширение возможностей процесса обучения на тренажере (по сравнению с тренажером-прототипом, выбранным в качестве базового объекта).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1990 |
|
RU2047909C1 |
| Тренажер оператора систем управления технологическими процессами | 1983 |
|
SU1208571A1 |
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ОПЕРАТОРА | 1990 |
|
RU2010340C1 |
| Тренажер оператора систем управления | 1989 |
|
SU1679520A2 |
| Тренажер оператора систем управления | 1988 |
|
SU1536426A1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМЫ УПРАВЛЕНИЯ НЕПРЕРЫВНОЙ РАЗЛИВКОЙ СТАЛИ | 2001 |
|
RU2226006C2 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
Изобретение относится к техническим средствам обучения и может быть использовано для начального обучения, повышения квалификации и тренировки операторов систем управления технологическими процессами. Цель изобретения - расширение функций тренажера. Тренажер оператора систем управления технологическими процессами содержит пульты 5 и 6 обучаемого и преподавателя, модели 11 - 13 каналов регулирования, сумматоры 15 - 19, блоки 20 - 24 сравнения, блок 10 задания возмущений, ключи 29 - 34, блок 14 моделирования канала преобразования возмущений, переключатель 28, блок 27 отображения информации, блоки 1, 2, 3 и 4 памяти натурных управлений, возмущений, заданий и выходов, генератор 7 ошибок реализации управлений, генератор 8 ошибок измерения выходов, блок 9 изменения заданий. 6 ил.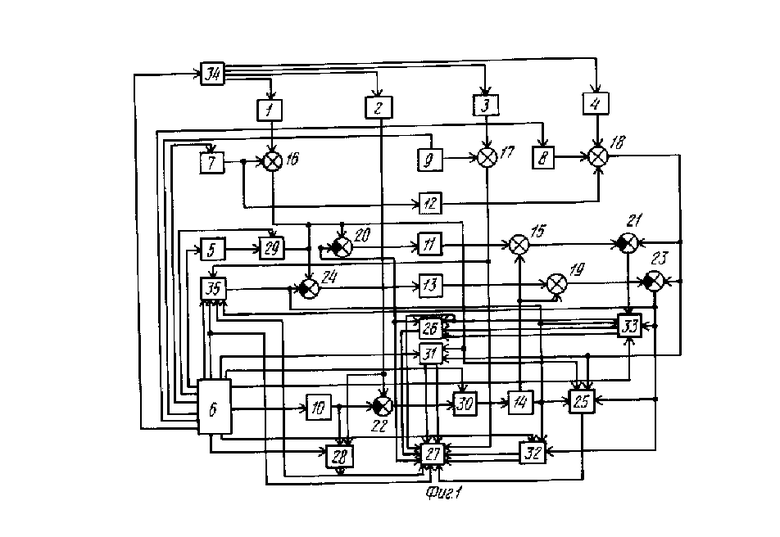
ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ, содержащий пульты преподавателя и обучаемого, четыре блока сравнения, первый сумматор, первый и второй ключи, блок задания возмущений, блоки памяти натурных возмущений, управлений, заданий и выходных сигналов, блок отображения информации и переключатель, выход которого соединен с первым входом блока отображения информации, первый выход пульта преподавателя соединен с входом блока задания возмущений, выход которого соединен с первыми входами первого блока сравнения и переключателя, второй вход которого соединен с вторым выходом пульта преподавателя, третий выход которого соединен с входом пульта обучаемого, а четвертый выход соединен с первым входом первого ключа, второй вход которого соединен с выходом первого блока сравнения, второй вход которого соединен с третьим входом переключателя и выходом блока памяти натурных возмущений, отличающийся тем, что, с целью расширения дидактических возможностей тренажера в него введены пятый блок сравнения, второй, третий, четвертый и пятый сумматоры, третий, четвертый и пятый ключи, блок задания ошибок управляющих сигналов, блок задания ошибок выходных сигналов, блок изменения заданий, два блока оценки эффективности управления, блок моделирования канала преобразования возмущений и три блока моделирования каналов регулирования, выходы которых соединены с первыми входами соответственно первого, второго и третьего сумматоров, выходы второго ключа соединены с входами блоков памяти натурных возмущений, управлений, заданий и выходных сигналов, а вход соединен с четвертым выходом пульта преподавателя, пятый, шестой и седьмой выходы которого соединены соответственно с входами блоков задания ошибок управляющих сигналов, блока задания ошибок выходных сигналов и блока изменения заданий, а восьмой выход соединен с первым входом третьего ключа, второй вход которого соединен с выходом пульта обучаемого, а выход соединен с первым входом первого блока оценки эффективности управления, вторым входом блока отображения информации и первым входом второго блока сравнения, выход которого соединен с входом первого блока моделирования канала регулирования, а второй вход которого соединен с первыми входами четвертого ключа, второго блока оценки эффективности управления и третьего блока сравнения и выходом четвертого сумматора, первый вход которого соединен с выходом блока памяти натурных управлений, а второй вход соединен с выходом блока задания ошибок управляющих сигналов и входом второго блока моделирования канала регулирования, выходы блока памяти натурных заданий и блока изменения заданий соединены соответственно с входами пятого сумматора, выход которого соединен с первым входом блока задания эталонных сигналов и вторым входом блока отобращения информации, третий и четвертый вход которого соединены с первым и вторым выходами четвертого ключа, а пятый и шестой входы соединены с выходом пятого ключа, первый вход которого соединен с девятым выходом пульта преподавателя, десятый выход которого соединен с вторым входом блока задания эталонных сигналов, третий вход которого соединен с восьмым входом блока отображения информации и десятым выходом пульта преподавателя, четвертый вход соединен с выходом переключателя, пятый вход соединен с первыми входами пятого и шестого ключей, вторым входом второго блока оценки эффективности управления и выходом четвертого блока сравнения, а выход соединен с третьим входом второго блока оценки эффективности управления и вторыми входами пятого и шестого ключей и третьего блока сравнения, выход которого соединен с входом третьего блока моделирования канала регулирования, девятый и десятый входы блока отображения информации соединены с выходами первого и второго блоков оценки эффективности управления, выход первого ключа соединен с входом блока моделирования канала преобразования возмущений, выход которого соединен с вторыми входами первого и второго сумматоров, выходы которых соединены соответственно с первыми входами четвертого и пятого блоков сравнения, вторые входы которых соединены с вторым входом четвертого ключа, четвертым входом второго блока оценки эффективности управления и выходом третьего сумматора, второй и третий входы которого соединены с выходами блока задания ошибок измерения выходных сигналов и блока памяти натурных выходов, двенадцатый, тринадцатый и четырнадцатый выходы пульта преподавателя соединены соответственно с третьими входами четвертого, пятого и шестого ключей, четвертый вход шестого ключа соединен с выходом пятого блока сравнения, а второй и третий выходы соединены с третьим и четвертым входами первого блока оценки эффективности управления.
