Изобретение относится к погрузочно-транспортным и строительно-дорожным машинам, а именно к гидравлическим амортизирующим устройствам, предназначенным для снижения продольных колебаний этих машин в процессе их движения, и может быть использовано при создании новых и модернизации существующих погрузчиков, автопогрузчиков, самоходных кранов, скреперов и других мобильных машин, оснащенных рабочим оборудованием с гидравлическим управлением.
Известно амортизирующее устройство, содержащее соединенный посредством гидролиний с источником питания постоянного давления, сливом и гидроцилиндром электрогидравлический усилитель мощности с дросселирующим золотником в выходном гидравлическом каскаде усиления, при этом обмотка управления электромеханического преобразователя первого каскада усиления электрогидравлического усилителя мощности соединена с выходом электронного усилителя мощности. Вход электронного усилителя мощности данного амортизирующего устройства через элемент сравнения соединен с выходами задатчика усилия и датчика нагрузки, воспринимаемой амортизирующим устройством. Датчик нагрузки может быть выполнен в виде акселерометра или в виде датчика суммарной силы.
Недостатком рассматриваемого амортизирующего устройства является зависимость положения поршня гидроцилиндра от величины статической нагрузки, воспринимаемой амортизирующим устройством, что систем амортизации рабочего оборудования погрузочно-транспортных машин.
При использовании в качестве датчика нагрузки датчика нагрузки датчика суммарной силы, воспринимаемой амортизрующим устройством, любое изменение статической нагрузки на амортизирующее устройство, превосходящее его зону нечувствительности, влечет за собой перемещение поршня гидроцилиндра устройства в соответствующее из его крайних положений, что делает возможность практического использования этого амортизирующего устройства весьма проблематичной.
Кроме того, рассматриваемое амортизирующее устройство обладает недостаточно высокими динамическими характеристиками, поскольку в качестве информационного параметре при его работе используется усилие (динамическое или статическое плюс динамическое), нагружающее данное устройство.
Наиболее близким по технической сущности к предлагаемому является амортизирующее устройство [1] .
Указанное амортизирующее устройство содержит соединенный посредством гидролиний с источником питания постоянного давления, сливом и гидроцилиндром электрогидравлический усилитель мощности с дросселирующим золотником и выходном гидравлическом каскаде усиления, при этом обмотка управления электромеханического преобразователя первого каскада усиления электрогидравлического усилителя мощности соединена с выходом электронного усилителя мощности, к соответствующим входам которого подключены выходы задатчика изменения положения поршня гидроцилиндра и блока отрицательной обратной связи по изменению положения поршня гидроцилиндра, а вход блока отрицательной обратной связи соединен с выходом датчика изменения положения поршня гидроцилиндра. Кроме этого, полости гидроцилиндра соединены с входами датчика перепада давления, выход которого через блок формирования управляющих сигналов, имеющий отдельный вход для ввода оператором дополнительных компенсирующих сигналов, соединен с соответствующим входом электронного усилителя мощности.
Недостатком известного амортизирующего устройства является его недостаточно высокие динамические характеристики, что обусловлено использованием при работе устройства в качестве информационного параметра значения усилия на штоке гидроцилиндра (а точнее: перепада давления в полостях гидроцилиндра, величина которого зависит от упомянутого усилия, а также от уровня давления жидкости в полостях гидроцилиндра и от соотношений эффективных площадей поршня гидроцилиндра со стороны его поршневой и штоковой полостей). По этом причине данное амортизирующее устройство реагирует на изменение воспринимаемой им статической нагрузки, что нежелательно.
Поскольку датчик изменения положения поршня гидроцилиндра известного амортизирующего устройства вырабатывает сигнал, пропорциональный смещению поршня относительно некоторого фиксированного положения, то рассматриваемое амортизирующее устройства является чувствительным к начальному положению поршня в гидроцилиндре, что неприемлемо для систем амортизации рабочего оборудования погрузочно-транспортных машин.
В основу изобретения положена задача создания амортизирующего устройства рабочего оборудования погрузочно-транспортной машины, обладающего более высокими динамическими характеристиками по сравнению с известными устройствами подобного назначения и инвариантного по отношению к величине воспринимаемой им статической нагрузки и по отношению к начальному (соответствующему моменту включения в работу амортизирующего устройства) положению рабочего оборудования относительно остова базовой машины (а следовательно, и по отношению к начальному положению поршня в гидроцилиндре привода рабочего оборудования).
Эта задача решается тем, что в амортизирующем устройстве рабочего оборудования погрузочно-транспортной машины, содержащем соединенный посредством гидролиний с источником питания постоянного давления, сливом и гидроцилиндром электрогидравлический усилитель мощности с дросселирующим золотником в выходном гидравлическом каскаде усиления, при этом обмотка управления электромеханического преобразователя первого каскада усиления электрогидравлического усилителя мощности соединена с выходом электронного усилителя мощности, к соответствующим входам которого подключены выходы задатчика изменения положения поршня гидроцилиндра и блока отрицательной обратной связи по изменению положения поршня гидроцилиндра, а вход блока отрицательной обратной связи соединен с выходом датчика изменения положения поршня гидроцилиндра, согласно изобретению электрогидравлический усилитель мощности выполнен с двумя полостями отрицательной обратной связи под противоположными торцами дросселирующего золотника выходного каскада усиления, к одной из которых подключена упругая камера с регулируемым объемом и каждая из которых через регулируемых объемов и каждая из которых через регулируемый дроссель соединена с исполнительной линией электрогидравлического усилителя мощности, соединенной с нагруженной весом рабочего оборудования полостью гидроцилиндра, датчик изменения положения поршня гидроцилиндра выполнен в виде реверсивного датчика расхода, установленного в указанной исполнительной линии электрогидравлического усилителя мощности, а блок отрицательной обратной связи по изменению положения поршня гидроцилиндра выполнен в виде интегратора.
Предлагаемое амортизирующее устройство отличается от прототипа новым конструктивным исполнением электрогидравлического усилителя мощности, датчика изменения положения поршня гидроцилиндра и блока отрицательной обратной связи по изменению положения поршня гидроцилиндра, а также взаимосвязью входящих в устройство элементов.
Наличие признаков, отличающих заявляемое устройство от прототипа, свидетельствует о соответствии предлагаемого технического решения критерию "новизна".
Выполнение электрогидравлического усилителя мощности с двумя полостями отрицательной обратной связи под противоположными торцами дросселирующего золотника выходного каскада усиления, к одной из которых подключена упругая камера с регулируемым объемом и каждая из которых через регулируемый дроссель соединена с исполнительной линией электрогидравлического усилителя мощности, соединенный с нагруженной весом рабочего оборудования полостью гидроцилиндра, обеспечивает: инвариантность амортизирующего устройства по отношению к величине воспринимаемой им статической нагрузки; использование в качестве информационного параметра при работе амортизирующего устройства значения скорости изменения давления (производной от давления по времени) в нагруженной весом рабочего оборудования полости гидроцилиндра. В силу последнего обстоятельства повышаются чувствительность и быстродействие амортизирующего устройства, то есть улучшаются его динамические характеристики.
Выполнение датчика изменения положения поршня гидроцилиндра в виде реверсивного датчика расхода, установленного в исполнительной линии электрогидравлического усилителя мощности, соединенной с нагруженной весом рабочего оборудования полостью гидроцилиндра, а блока отрицательной обратной связи по изменению положения поршня гидроцилиндра - в виде интегратора, обеспечивают инвариантность предлагаемогол амортизирующего устройства по отношению к начальному (соответствующему моменту включения амортизирующего устройства в работу) положению рабочего оборудования относительно остова базовой машины (по отношению к начальному положению поршня в гидроцилиндре привода рабочего оборудования).
Известные конструкции активных амортизирующих устройств рабочего оборудования погрузочно-транспортных машин не обладает такой совокупностью свойств, что свидетельствует о соответствии заявляемого технического решения избирательскому уровню.
Указанные выше отличительные признаки предлагаемого амортизирующего устройства обеспечивают получение положительного эффекта, заключающегося: в снижении динамических нагрузок на несущие конструкции и рабочее оборудование погрузочно-транспортной машины, и соответственно в повышении плавности хода и долговечности машины (благодаря этому при прочих равных условиях появляется возможность движения машины на повышенных скоростях, что ведет к увеличению ее производительности); в сохранении в процессе работы амортизирующего устройства (в качестве среднего при колебаниях) заданного положения рабочего оборудования относительно остова базовой машины и в исключении тем самым необходимости периодической корректировки положения рабочего оборудования посредством его гидропривода, что делает целесообразным промышлленное применение предлагаемого устройства.
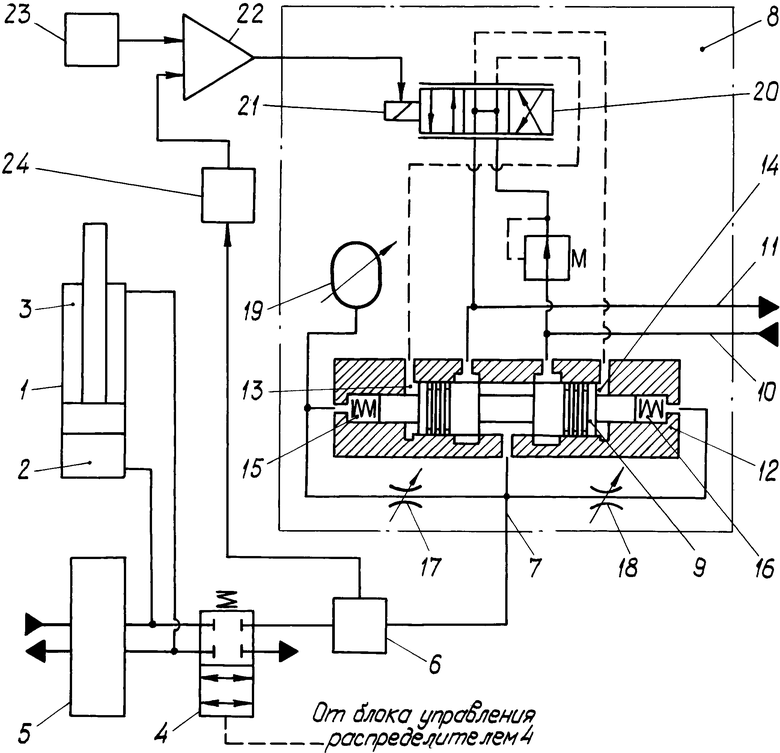
На чертеже изображена принципиальная схема амортизирующего устройства рабочего оборудования погрузочно-транспортной машины.
Амортизирующее устройство рабочего оборудования погрузочно-транспортной машины включает гидроцилиндр 1 привода рабочего оборудования (может быть два таких гидроцилиндра, соединенных гидравлически параллельно), рабочие полости 2 и 3 которого соединены гидролиниями с первым и вторым каналами вспомогательного двухпозиционного четырехканального гидрораспределителя 4 и с исполнительными каналами гидрораспределителя 5 управления рабочим оборудованием. Напорная и сливная полости гидрораспределителя 5 соединены соответственно с источником питания гидропривода рабочего оборудования (на чертеже источник питания гидропривода не показан) и со сливом. Гидрораспределитель 5 имеет в своем составе обратные клапаны (на чертеже обратные клапаны не показаны), соединяющие сливную полость гидрораспределителя с его исполнительными каналами и предназначенные для предотвращения нарушения сплошности рабочей жидкости в присоединенных к указанным каналам полостях 2 и 3 гидроцилиндра 1.
Третий канал вспомогательного двухпозиционного гидрораспределителя 4 соединен со сливом, а четвертый канал через реверсивный датчик расхода 6, используемый в качестве датчика изменения положения поршня гидроцилиндра 1, соединен с исполнительной линией 7 электрогидравлического усилителя мощности 8 с внутренней гидравлической отрицательной обратной связью по скорости изменения давления в исполнительной линии 7 усилителя.
При первом (исходном) положении золотника вспомогательного двухпозиционного гидрораспределителя 4, показанном на чертеже, все его каналы перекрыты; при втором (рабочем) положении упомянутого золотника первый канал гидрораспределителя 4 соединен с четвертым, а второй - с третьим, в результате чего нагружения весом рабочего оборудования полость 2 гидроцилиндра 1 через реверсивный датчик расхода 6 сообщается с исполнительной линией 7 электрогидравлического усилителя мощности 8, а полость 3 гидроцилиндра 1 - со сливом. Управление золотником гидрораспределителя 4 может быть любым (например, дистанционным гидравлическим, как показано на чертеже).
Электрогидравлический усилитель мощности 8 содержит в своем выходном гидравлическом каскаде усиления дросселирующий золотник 9, предназначенный для соединения и разобщения исполнительной линии 7 усилителя с его напорной 10 и сливной 11 линиями. Напорная линия 10 усилителя 8 соединена с источником питания постоянного давления (на чертеже источник питания постоянного давления не показан), а сливная линия 11 - со сливом.
Дросселирующий золотник 9 установлен в корпусе 12 усилителя 8 с образованием двух полостей 13 и 14 управления и двух полостей 15 и 16 отрицательной обратной связи со стороны противоположных торцов золотника. При этом эффективные площади торцов золотника 9 со стороны полостей управления 13 и 14 равны между собой, а эффективные площади торцов золотника 9 со стороны полостей отрицательной обратной связи 15 и 16 также равны между собой.
При исходном (нейтральном) положении дросселирующего золотника 9 исполнительная линия 7 электрогидравлического усилителя мощности 8 отделена от его напорной 10 и сливной 11 линий. При смещении золотника 9 из нейтрального положения в сторону полостей 13 и 15 исполнительная линия 7 соединяется со сливной линией 11. При смещении золотника 9 из нейтрального положения в сторону полостей 14 и 16 исполнительная линия 7 соединяется с напорной линией 10.
На приведенной на чертеже принципиальной схеме амортизирующего устройства полости 15 и 16 отрицательной обратной связи образованы двумя симметрично расположенными цилиндрическими хвостовиками (одинаковых размеров) золотника 9 и соответствующими расточками корпуса 12 электрогидравлического усилителя мощности 8. Возможны и другие конструктивные варианты выполнения этих поостей. В частности, полости отрицательной обратной связи могут быть образованы осевыми расточками в торцах золотника 9 и установленными в них плунжерами, контактирующими с одной стороны, с корпусом 12, а с другой стороны - со стрежнем, установленным между ними в осевом отверстии золотника 9.
Полости 15 и 16 отрицательной обратной связи соединены с исполнительной линией 7 усилителя мощности 8 посредством регулируемых дросселей соответственно 17 и 18. При этом к полости 15 подключена упругая камера 19 с регулируемым объемом.
Роль упругой камеры 19 с регулируемым объемом может выполнять цилиндровая полость, положение поршня в которой изменяется посредством регулировочного винта. При этом функции упорного элемента фактически выполняет рабочая жидкость, находящаяся в упомянутой полости, а металлическая стенка цилиндровой полости может иметь любую толщину, удовлетворяющую требованиям прочности.
Полости управления 13 и 14 дросселирующего золотника 9 электрогидравлического усилителя мощности 8 соединены с исполнительными линиями первого каскада усиления 20 усилителя 8, управляемого посредством электромеханического преобразователя 21.
Обмотка управления электромеханического преобразователя 21 соединена с выходом электронного усилителя мощности 22, к соответствующим входам которого подключены выходы задатчика 23 изменения положения поршня гидроцилиндра 1 и блока отрицательной обратной связи по изменению положения поршня гидроцилиндра 1, выполненного в виде интегратора 24. При этом вход интегратора 24 соединен с выходом реверсивного датчика расхода 6.
Непосредственно после включения в работу амортизирующего устройства (подачи напряжения питания на его электронные блоки: электронный усилитель мощности 22, задатчик 23 изменения положения поршня гидроцилиндра 1, интегратор 24) сигналы на выходе задатчика 23 и интегратора 24 имеют нулевой уровень.
Включение и отключение напряжения питания электронных блоков амортизирующего устройства может быть выполнено посредством одного переключателя с обеспечением автоматической подачи управляющего сигнала на перемещения золотника вспомогательного двухпозиционного гидрораспределителя 4 соответственно в рабочее или в исходное положения.
Амортизирующее устройство рабочего оборудования погрузочно-транспортной машины работает следующим образом.
При отсутствии управляющего сигнала на вспомогательный двухпозиционный гидрораспределитель 4 золотник последнего занимает показанное на чертеже первое (исходное) положение, при котором все четыре канала гидрораспределителя перекрыты. В указанном случае амортизирующее устройство отключено и соответственно не действует. При этом в зависимости от вида и режима работы погрузочно-транспортной машины источник питания постоянного давления эллектрогидравлического усилителя мощности 8 (на чертеже источник питания постоянного давления не показан) может быть либо известным образом рагружен (например, посредством клапана с дистанционным управлением), либо использоваться для подачи рабочей жидкости в другие части гидросистемы базовой машины (на чертеже клапан с дистанционным управлением и другие части гидросистемы погрузочно-транспортной машины не показаны). Посредством гидрораспределителя 5 возможно запирание полостей 2 и 3 гидроцилиндра 1 привода рабочего оборудования и их соединение тем или иным образом с источником питания (на чертеже источник питания не показан) и сливом, а также между собой, что обеспечивает фиксацию и соответствующее изменение положение рабочего оборудования относительно остова базовой машины.
Включение амортизирующего устройства после установки рабочего оборудования (с использованием гидрораспределителя 5( в потребное положение относительно остова базовой машины производится путем подачи напряжения питания на электронный усилитель мощности 22, задатчик 23 изменения положения поршня гидроцилиндра 1 и интегратолр 24 и управяющего сигнала на перемещение золотника вспомогательного двухпозиционного гидрораспределителя в его второе (рабочее) положение. Вышеуказанные операции по включению амортизирующего устройства могут выполняться как оператором машины, так и автоматически с помощью соответствующего путевого переключателя (на чертеже путевой переключатель не показан) по ходу штока гидроцилиндра 1 или по положению рабочегно оборудования.
При перемещении золотника гидрораспределителя 4 в его рабочее положение нагруженная весом рабочего оборудования полость 2 гидроцилиндра 1 через реверсивный датчик расхода 6 сообщается с исполнительной линией 7 электрогидравлического усилителя мощности 8, а полость 3 гидроцилиндра 1 - со сливом.
Непосредственно после включения амортизирующего устройства сигналы на выходе задатчика 23 изменения положения поршня гидроцилиндра 1 и интегратора 24. а соответственно и на выходе электронного усилителя мощности 22, к которому подключена обмотка управления электромеханического преобразователя 21 электрогидравлического усилителя мощности 8, равны нулю, что обеспечивает инвариантность амортизирующего устройства по отношению к начальному (соответствующему моменту включения амортизирующего устройства в работу) положению рабочего оборудования относительно основа базовой машины (по отношению с начальному положению поршня в гидроцилиндре 1 привода рабочего оборудования).
Если в силу колебаний базовой погрузочно-транспортной машины, обусловленных, например, ее движением по неровной поверхности, нагрузка, воспринимаемая гидроцилиндром 1 привода рабочего оборудования, начинает изменяться, то начинает изменяться давление в нагруженной весом рабочего оборудования полости 2 этого гидроцилиндра и в соединенных с ней исполнительной линии 7 и полостях отрицательной обратной связи 15 и 16 электрогидравлического усилителя мощности 8.
Поскольку к полости отрицательной обратной связи 15 подключена упругая камера 19 с регулируемым объемом, то при изменении в полости 15 и соответственно в камере 19 давления появляется течение рабочей жидкости через регулируемый дроссель 17 и на нем создается перепад давления, значение которого при фиксированных параметрах дросселя и упругой камеры 19 зависит от величины производной по времени от давления в полости 2 гидроцилиндра 1, то есть от скорости изменения давления в упомянутой полости. В силу данного обстоятельства давления в полостях отрицательной обратной связи 15 и 16 оказываются неравными и со стороны рабочей жидкости, находящейся в этих полостях, на дросселирующий золотник 9 действует сила, определяемая скоростью изменения давления в полости 2 гидроцилиндра 1. Под действием указанной силы золотник 9 приходит в движение в соответствующем направлении относительно корпуса 12.
При увеличении давления в полости 2 гидроцилиндра 1 рабочая жидкость движется через дроссель 17 из линии 7 в сторону упругой камеры 19, в результате чего давлениел в соединенной с ней полости 15 оказывается меньшим, чем в полости 16, и под действием силы давления жидкости, находящейся в полостях 16 и 15, дросселирующий золотник 9 смещается в сторону полости 15. При этом вследствие вытеснения золотником 9 жидкости из полости 15 давление в полости 15 и в упругой камере 19 при прочих равных условиях увеличивается в то время, как давление в полости 16, куда жидкость из-за поршневого эффекта золотника 9 поступает через регулируемый дроссель 18 из линии 7, уменьшается (по сравнению с текущим значением давления в линии 7). Таким образом реализуется внутренняя гидравлическая отрицательная обратная связь по скорости движения дросселирующего золотника 9, обеспечивающая повышение устойчивости работы амортизирующего устройства в целом.
При смещении дросселирующего золотника 9 из нейтрального положения в сторону полости 15 исполнительная линия 7 электрогидравлического усилителя мощности 8 соединяется со сливной линией 11 усилителя. В результате этого рабочая жидкость из полости 2 гидроцилиндра 1 получает возможность через реверсивный датчик расхода 6 перетекать на слив, что предотвращает увеличение давления в полости 2 гидроцилиндра 1 и соответственно усилий на штоке и на корпусе гидроцилиндра.
При вытеснении жидкости из полости 2 гидроцилиндра 1 рабочая жидкость поступает в полость 3 этого гидроцилиндра со слива через открытое рабочее окно вспомогательного гидрораспределителя 4.
При уменьшении давления в полости 2 гидроцилиндра 1 рабочая жидкость движется через дроссель 17 в линию 7 из упругой камеры 19, в результате чего давление в соединенной с ней полости 15 оказывается больше, чем в полости 16, и под действием силы давления жидкости, находящейся в полостях 15 и 16, дросселирующий золотник 9 смещается в сторону полости 16. При этом вследствие вытеснения золотником 9 жидкости из полости 16 через дроссель 18 в линию 7 давление в полости 16 увеличивается (по сравнению с текущим значением давления в линии 7) в то время, как в полости 15, объем которой из-за поршневого эффекта золотника 9 в рассматриваемом случае увеличивается, давление дополнительно снижается. В итоге осуществляется внутренняя гидравлическая отрицательная обратная связь по скорости движения дросселирующего золотника 9.
При смещении дросселирующего золотника 9 из нейтрального положения в сторону полости 16 исполнительная линия 7 электрогидравлического усилителя мощности 8 соединяется с напорной линией 10 усилителя. В результате этого рабочая жидкость от источника питания постоянного давления через реверсивный датчик расхода 6 поступает в полость 2 гидроцилиндра 1, что предотвращает уменьшение давления в полости 2 гидроцилиндра 1 и соответственно усилий на штоке и на корпусе гидроцилиндра.
В данном случае рабочая жидкость из полости 3 гидроцилиндра 1 через открытое рабочее окно вспомогательного гидрораспределителя 4 поступает на слив.
Поскольку соединение нагруженной весом рабочего оборудования полости 2 гидроцилиндра 1 со сливом и с источником питания постоянного давления через рабочие окна, открываемые дросселирующим золотником 9 электрогидравлического усилителя мощности 8, производится в зависимости от скорости изменения давления в полости 2 гидроцилиндра 1, то обеспечиваются: инвариантность амортизирующего устройства по отношению к величине статической нагрузки на штоке гидроцилиндра 1 привода рабочего оборудования; высокие чувствительность и быстродействие амортизирующего устройства и как следствие этого снижение динамических нагрузок на рабочее оборудование и несущие конструкции базовой погрузочно-транспортной машины.
Выполнение дросселей 17 и 18 и упругой камеры 19 регулируемыми упрощает наладку амортизирующего устройства с целью обеспечения его потребных динамических характеристик (чувствительности к скорости изменения давления, быстродействия, устойчивости).
При движении рабочей жидкости через реверсивный датчик расхода 6 из полости 2 гидроцилиндра 1 в сторону исполнительной линии 7 усилителя 8 и обратно на выходе датчика 6 формируется сигнал, пропорциональный текущему значению расхода жидкости через датчик (с учетом направления движения жидкости), которое в свою очередь пропорционально мгновенной скорости движения поршня гидроцилиндра 1. В силу этого в процессе работы амортизирующего устройства сигнал на выходе интегратора 24 в каждый текущий момент времени пропорционален смещению поршня гидроцилиндра 1 из начального положения, соответствующего моменту включения амортизирующего устройства. Указанный сигнал в электронном усилителе мощности 22 сравнивается с сигналом, поступающим с задатчика 23 изменения положения поршня гидроцилиндра 1. Усиленная разность сигналов с задатчика 23 и интегратора 24 с выхода усилителя 22 поступает на обмотку управления электромеханического преобразователя 21 первого каскада усиления 20 электрогидравлического усилителя мощности 8. Изменение величины электрического сигнала, поступающего на обмотку электромеханического преобразователя 21, влечет за собой изменение перепада давления в полостях управления 13 и 14 дросселирующего золотника 9 и соответственно изменение баланса сил, действующих на золотник.
При смещении поршня гидроцилиндра 1 в сторону полости 2 относительно начального положения поршня с учетом изменения положения, определяемого величиной сигнала с задатчиком 23, давление в полости 13 превышает давление в полости 14 и со стороны жидкости, находящейся в полостях 13 и 14, на золотник 9 действует сила, направленная в сторону полости 14 и стремящаяся сместить золотник 9 в положение, при котором исполнительная линия 7 усилителя 8 сообщается с его напорной линией 10. В последнем случае жидкость от источника питания постоянного давления поступает в полость 2 гидроцилиндра 1, что влечет за собой движение поршня гидроцилиндра в сторону полости 3 и уменьшение тем самым отклонения поршня от заданного положения.
При смещении поршня гидроцилиндра 1 в сторону полости 3 относительно заданного положения давление в полости 14 превышает давление в полости 13 и со стороны жидкости, находящейся в полостях 14 и 13, на золотник 9 действует сила, направленная в сторону полости 13 и стремящаяся сместить золотник 9 в положение, при котором исполнительная линия 7 усилителя 8 сообщается с его сливной линией 11. При этом жидкость из полости 2 гидроцилиндра 1 под действием веса рабочего оборудования вытесняется на слив, что влечет за собой движение поршня гидроцилиндра 1 в сторону полости 3 и уменьшение тем самым отклонения поршня от заданного положения.
Таким образом реализуется отрицательная обратная связь по изменению положения поршня гидроцилиндра 1 и обеспечивается сохранение в процессе работы амортизирующего устройства (в качестве среднего при колебаниях) заданного положения рабочего оборудования относительно остова базовой машины.
При необходимости в процессе работы амортизирующего устройства по каким-либо причинам изменить положение рабочего оборудования относительно остова базовой машины (определяемое положением поршня гидроцилиндра 1) достаточно изменить соответствующим образом сигнал, поступающий с задатчика 23 на вход электронного усилителя мощности 22.
В процессе работы амортизирующего устройства в каждый текущий момент времени величина и направление смещения дросселирующего золотника 9 из его нейтрального положения зависит от знака и величины скорости изменения давления в полости 2 гидроцилиндра 1 и смещения поршня гидроцилиндра 1 из заданного положения.
При нулевом сигнале на выходе электронного усилителя мощности 22 и неизменной величине давления (любого уровня) в полости 2 гидроцилиндра 1 дросселирующий золотник 9 занимает нейтральное положение, при котором от перекрывает исполнительную линию 7 электрогидравлического усилителя мощности 8 и запирает тем самым полость 2 гидроцилиндра 1.
При выключении амортизирующего устройства золотник вспомогательного двухпозиционного гидрораспределителя 4 возвращается в его исходное положение, показанное на чертеже, а задатчик 23, электронный усилитель мощности 22 и интегратор 24 обесточивается. При этом информация об имевших место величинах сигналов на выходе задатчика 23 и интегратора 24 утрачивается.
Из приведенного описания работы заявляемого амортизирующего устройства рабочего оборудования погрузочно-транспортной машины видно, что осуществление предлагаемого устройства, характеризующегося вышеизложенными отличительными признаками, обеспечивает улучшение динамических характеристик (чувствительности и быстродействия) устройства по сравнению с известными системами подобного назначения и инвариантность устройства по отношению к величине воспринимаемой им статической нагрузки и по отношению к начальному положению рабочего оборудования относительно остова базовой машины. В процессе работы амортизирующего устройства сохраняется (в качестве среднего при колебаниях) заданное положение рабочего оборудования относительно остова базовой машины, что исключает необходимость в периодической корректировке положения рабочего оборудования посредством его гидропривода.
Благодаря улучшению динамических характеристик амортизирующего устройства при его использовании снижаются динамические нагрузки на рабочее оборудование и несущие конструкции погрузочно-транспортной машины и соответственно повышается плавность хода и долговечность машины. Следует отметить , что повышение долговечности машины влечет за собой увеличение мехремонтных сроков, снижение времени простоев машины, уменьшение затрат на ремонтные работы. Поскольку плавность хода машины улучшается, то при прочих равных условиях появляется возможность движения машины на повышенных скоростях, что ведет к повышению ее производительности.
Амортизирующее устройство рабочего оборудования погрузочно-транспортной машины согласно изобретению с успехом может быть использовано на погрузчиках, автопогрузчиках, самоходных кранах, скреперах и других мобильных машинах, оснащенных рабочим оборудованием с гидравлическим управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД | 1991 |
|
RU2031257C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ГИДРОПРИВОД ПЕРЕДНЕЙ ГОЛОВКИ ПРАВИЛЬНО-РАСТЯЖНОЙ МАШИНЫ | 2013 |
|
RU2536734C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1990 |
|
RU2030657C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2011 |
|
RU2455536C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОПОЛОСТНЫМ ГИДРОЦИЛИНДРОМ | 2005 |
|
RU2282761C1 |
Использование: погрузочно-транспортные машины с гидравлическим амортизирующим устройством. Сущность изобретения: электрогидравлический усилитель мощности выполнен с двумя полостями отрицательной обратной связи под противоположными торцами дросселирующего золотника выходного каскада усиления. К одной полости подключена упругая камера с регулируемым объемом и каждая полость через регулируемый дроссель соединена с исполнительной линией электрогидравлического усилителя мощности. Исполнительная линия соединена с нагруженной весом рабочего оборудования полостью гидроцилиндра. Датчик изменения положения поршня гидроцилиндра выполнен в виде реверсивного датчика расхода, а блок отрицательной обратной связи - в виде интегратора. 1 ил.
АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО РАБОЧЕГО ОБОРУДОВАНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНОЙ МАШИНЫ, содержащее соединенный посредством гидролиний с источником питания постоянного давления, сливом и гидроцилиндром электрогидравлический усилитель мощности с дросселирующим золотником в выходном гидравлическом каскаде усиления, при этом обмотка управления электромеханического преобразователя первого каскада усиления электрогидравлического усилителя мощности соединена с выходом электронного усилителя мощности, к соответствующим входам которого подключены выходы задатчика изменения положения поршня гидроцилиндра и блока отрицательной обратной связи по изменению положения поршня гидроцилиндра, а вход блока отрицательной обратной связи соединен с выходом датчика изменения положения поршня гидроцилиндра, отличающееся тем, что электрогидравлический усилитель мощности выполнен с двумя полостями отрицательной обратной связи под противоположными торцами дросселирующего золотника выходного каскада усиления, к одной из которых подключена упругая камера с регулируемым объемом и каждая из которых через регулируемый дроссель соединена с исполнительной линией электрогидравлического усилителя мощности, соединенной с нагруженной весом рабочего оборудования полостью гидроцилиндра, датчик изменения положения поршня гидроцилиндра выполнен в виде реверсивного датчика расхода, установленного в указанной исполнительной линии электрогидравлического усилителя мощности, а блок отрицательной обратной связи выполнен в виде интегратора.
