Изобретение относится к области объемного гидравлического привода, а именно к способам управления многополостными гидродвигателями поступательного движения (гидроцилиндрами) с большой величиной хода (например, телескопическими гидроцилиндрами), и может быть использовано, в частности, для управления рабочим оборудованием грузоподъемных машин, а также других агрегатов, характеризующихся большой величиной перемещения рабочего оборудования.
Известен способ управления многополостным гидроцилиндром, рабочие полости которого, предназначенные для обеспечения движения выходного звена гидроцилиндра в одном и том же направлении при подаче в них рабочей жидкости, постоянно сообщаются внутри гидроцилиндра между собой, включающий подачу рабочей жидкости в рабочую полость гидроцилиндра для обеспечения движения его выходного звена в одном направлении и соединение указанной полости со сливом при осуществлении движения выходного звена в обратном направлении [1, 2]. При этом тип многополостного гидроцилиндра может быть разным. Многополостной гидроцилиндр может быть, например, телескопическим [1], а может состоять из двух и более поршневых гидроцилиндров двухстороннего действия с односторонним штоком, при этом шток каждого предыдущего гидроцилиндра жестко соединен с непроходной крышкой последующего гидроцилиндра [2].
При использовании известного способа управления многополостным гидроцилиндром по мере подачи рабочей жидкости в текущую напорную рабочую полость гидроцилиндра и обусловленного этим перемещения его выходного звена объем рабочей жидкости в напорной полости гидроцилиндра, воспринимающей внешнюю нагрузку и участвующей в процессе перемещения выходного звена, увеличивается. Вследствие этого коэффициент жесткости гидроцилиндра со стороны напорной полости, обратно пропорциональный объему жидкости в указанной полости гидроцилиндра и присоединенной к ней гидролинии, уменьшается и, соответственно, при прочих равных условиях уменьшается частота собственных колебаний гидропривода, в состав которого входит гидроцилиндр. Снижение коэффициента жесткости собственно гидроцилиндра влечет за собой увеличение неуправляемых перемещений его выходного звена при изменениях внешней нагрузки, что проявляется, в частности, в снижении точности позиционирования приводимого с помощью гидроцилиндра рабочего оборудования. В следящих гидроприводах (например, охваченных отрицательной обратной связью по скорости движения выходного звена гидроцилиндра) уменьшение частоты собственных колебаний гидропривода (и тем самым сужение его полосы пропускания частот), обусловленное снижением коэффициента жесткости гидроцилиндра, влечет за собой ухудшение быстродействия гидропривода, снижение его динамической точности. Это может стать причиной неустойчивой работы гидропривода, что равносильно потере им работоспособности (то есть отказу).
Таким образом, недостатком известного способа управления многополостным гидроцилиндром является уменьшение по мере подачи рабочей жидкости в напорную полость гидроцилиндра (для обеспечения движения его выходного звена в соответствующем направлении) коэффициента жесткости гидроцилиндра со стороны этой полости и обусловленное этим ухудшение динамических характеристик гидропривода, в состав которого входит гидроцилиндр.
Наиболее близким к заявляемому техническому решению является принятый в качестве прототипа способ управления многополостным гидроцилиндром, содержащим, по меньшей мере, две рабочие полости, предназначенные для обеспечения движения выходного звена гидроцилиндра в одном и том же направлении при подаче в них рабочей жидкости и имеющие индивидуальные каналы для подвода и отвода рабочей жидкости, не сообщающиеся внутри гидроцилиндра между собой, включающий подачу рабочей жидкости в рабочую полость гидроцилиндра для обеспечения движения его выходного звена в одном направлении и соединение указанной полости со сливом при осуществлении движения выходного звена в обратном направлении [3].
При использовании указанного способа управления многополостным гидроцилиндром подача рабочей жидкости в каждую из рабочих полостей, предназначенных для обеспечения движения выходного звена гидроцилиндра в одном и том же направлении, осуществляется вне зависимости от того, осуществляется ли одновременно подача рабочей жидкости в другие рабочие полости подобного назначения, или они соединены со сливом, или заперты. Такая возможность управления обеспечивается благодаря тому, что каждая из рассматриваемых полостей сообщена с источником потока рабочей жидкости и со сливом посредством индивидуального трехлинейного трехпозиционного гидрораспределителя, имеющего позицию, при которой все его каналы заперты.
Однако при использовании данного способа управления многополостным гидроцилиндром в случае изменения величины внешней нагрузки, действующей на выходное звено гидроцилиндра, одновременно изменяется давление во всех рабочих полостях гидроцилиндра, предназначенных для обеспечения (при подаче в них рабочей жидкости) движения выходного звена гидроцилиндра в направлении, противоположном действующей нагрузке, которые в текущий момент времени соединены с источником потока рабочей жидкости или заперты посредством соответствующих гидрораспределителей при количестве жидкости в каждой полости, превышающем величину "мертвого" объема последней. Поэтому коэффициент жесткости многополостного гидроцилиндра зависит от суммарного объема жидкости, находящейся в указанных рабочих полостях гидроцилиндра, и при прочих равных условиях уменьшается по мере увеличения количества жидкости, поступившей в гидроцилиндр для обеспечения движения его выходного звена в соответствующем направлении, что влечет за собой ухудшение динамических характеристик (полосы пропускания частот, быстродействия и т.п.) гидропривода, в состав которого входит гидроцилиндр.
Таким образом, недостатком рассматриваемого способа управления многополостным гидроцилиндром является уменьшение коэффициента жесткости гидроцилиндра со стороны рабочих полостей, жидкость в которых воспринимает внешнюю нагрузку, по мере увеличения перемещения выходного звена гидроцилиндра в направлении, противоположном действию внешней нагрузки.
Технической задачей, решаемой изобретением, является создание способа управления многополостным гидроцилиндром, обеспечивающего сохранение высокого коэффициента жесткости многополостного гидроцилиндра на всем протяжении хода его выходного звена.
Для решения данной технической задачи в известном способе управления многополостным гидроцилиндром, содержащим, по меньшей мере, две рабочие полости, предназначенные для обеспечения движения выходного звена гидроцилиндра в одном и том же направлении при подаче в них рабочей жидкости и имеющие индивидуальные каналы для подвода и отвода рабочей жидкости, не сообщающиеся внутри гидроцилиндра между собой, включающем подачу рабочей жидкости в рабочую полость гидроцилиндра для обеспечения движения его выходного звена в одном направлении и соединение указанной полости со сливом при осуществлении движения выходного звена в обратном направлении, согласно изобретению после увеличения объема рабочей полости гидроцилиндра, вследствие подачи в нее рабочей жидкости, до максимального значения, соответствующего перемещению до упора подвижного звена, ограничивающего данную полость, порцию жидкости, заключенную в указанной полости, исключают из участия в процессе перемещения выходного звена гидроцилиндра путем соединения данной полости с источником повышенного давления, превышающего максимальное рабочее давление, необходимое для преодоления внешней нагрузки на выходном звене гидроцилиндра, а при движении выходного звена гидроцилиндра в обратном направлении рабочие полости гидроцилиндра, соединенные с источником повышенного давления, последовательно отсоединяют от источника повышенного давления и соединяют со сливом.
Соединение рабочей полости многополостного гидроцилиндра с источником повышенного давления, превышающего максимальное рабочее давление, необходимое для преодоления внешней нагрузки на выходном звене гидроцилиндра, после увеличения объема рабочей полости гидроцилиндра, вследствие подачи в нее рабочей жидкости, до максимального значения, соответствующего перемещению до упора подвижного звена, ограничивающего данную полость, приводит к поджиму упомянутого подвижного звена к упору с усилием, гарантированно превышающим усилие, действующее на это звено в противоположном направлении. Поэтому при изменениях внешнего усилия, действующего на выходное звено гидроцилиндра, дошедшее до упора подвижное звено не меняет свое положение относительно упора, и порция рабочей жидкости, заключенная в рабочей полости, ограниченной этим подвижным звеном, не воспринимает изменений внешнего усилия и не деформируется, то есть исключается из участия в процессе перемещения выходного звена гидроцилиндра. В силу сказанного, при использовании предлагаемого способа управления многополостным гидроцилиндром на протяжении всего хода выходного звена этого гидроцилиндра в соответствующем направлении объем рабочей жидкости в гидроцилиндре, воспринимающей изменения внешнего усилия, не превышает значение максимального объема жидкости в пределах одной напорной рабочей камеры, величина которого может быть весьма мала (и определяется при прочих равных условиях количеством рабочих полостей идентичного назначения в конструкции многополостного гидроцилиндра). Благодаря этому обеспечивается сохранение высокого коэффициента жесткости многополостного гидроцилиндра со стороны рабочих полостей, жидкость в которых воспринимает внешнюю нагрузку, на всем протяжении хода его выходного звена.
При движении выходного звена в обратном направлении рабочие полости гидроцилиндра, соединенные с источником повышенного давления, последовательно отсоединяют от источника повышенного давления и соединяют со сливом, что необходимо для осуществления движения выходного звена в обратном направлении. При этом объем жидкости, подвергающейся деформации в текущих сливных полостях гидроцилиндра, на протяжении всего обратного хода выходного звена также не превышает значение максимального объема жидкости в пределах одной рабочей камеры, благодаря чему обеспечивается сохранение высокого коэффициента жесткости многополостного гидроцилиндра со стороны текущих сливных полостей на всем протяжении хода его выходного звена.
На чертеже изображена схема гидропривода для осуществления предлагаемого способа управления многополостным гидроцилиндром.
Многополостной гидроцилиндр 1 в данном случае представляет собой телескопический гидроцилиндр двухстороннего действия с двумя подвижными секциями и состоит из корпуса 2, поршня 3 со штоком 4, установленных в корпусе 2 с образованием поршневой 5 и штоковой 6 полостей, и поршня 7 со штоком 8, установленных в осевой расточке штока 4 с образованием поршневой 9 и штоковой 10 полостей. Полости 5, 6, 9, 10 снабжены индивидуальными каналами: соответственно 11, 12, 13 и 14 - для подвода и отвода рабочей жидкости, которые не соединены внутри гидроцилиндра между собой.
В состав гидропривода входят четыре трехлинейных трехпозиционных гидрораспределителя 15, 16, 17, 18, у каждого из которых напорный канал соединен с источником 19 потока рабочей жидкости, а сливной канал - со сливом 20, и четыре двухлинейных двухпозизионных гидрораспределителя 21, 22, 23, 24, у каждого из которых напорный канал соединен с источником 25 повышенного давления, превышающего максимальное рабочее давление, необходимое для преодоления внешней нагрузки на выходном звене гидроцилиндра 1.
Исполнительные (рабочие) каналы гидрораспределителей 15 и 21 соединены между собой и с каналом 11 гидроцилиндра 1, гидрораспределителей 16 и 22 - между собой и с каналом 12 гидроцилиндра 1, гидрораспределителей 17 и 23 - между собой и с каналом 13 гидроцилиндра 1, гидрораспределителей 18 и 24 - между собой и с каналом 14 гидроцилиндра 1.
На чертеже для определенности показано, что гидрораспределители 15, 16, 17, 18, 21, 22, 23, 24 выполнены с электрическим управлением и пружинным возвратом золотника в исходное положение. В общем случае исполнение гидрораспределителей может быть иным.
В исходной позиции гидрораспределителей 15, 16, 17, 18, 21, 22, 23, 24, которая имеет место при обесточенных электромагнитах их управления, все каналы перечисленных гидрораспределителей заперты.
В рабочей (левой по чертежу) позиции каждого из двухпозиционных гидрораспределителей 21, 22, 23, 24, которая имеет место при подаче напряжения на электромагнит управления соответствующего гидрораспределителя, напорный и исполнительный каналы гидрораспределителя соединены между собой.
В первой (левой по чертежу) рабочей позиции каждого из трехпозиционных гидрораспределителей 15, 16, 17, 18, которая имеет место при подаче напряжения на левый (по чертежу) электромагнит управления соответствующего гидрораспределителя, напорный и исполнительный каналы гидрораспределителя соединены между собой, а сливной канал заперт. Во второй (правой по чертежу) рабочей позиции каждого из трехпозиционных гидрораспределителей 15, 16, 17, 18, которая имеет место при подаче напряжения на правый (правый) электромагнит управления соответствующего гидрораспределителя, напорный канал гидрораспределителя заперт, а его исполнительный и сливной каналы соединены между собой.
Предлагаемый способ управления многополостным гидроцилиндром реализуют следующим образом (дальнейшее пояснение относится к случаю, когда выходным звеном многополостного гидроцилиндра 1 является шток 8).
При неработающем гидроприводе все электромагниты гидрораспределителей 15, 16, 17, 18, 21, 22, 23, 24 обесточены, золотники указанных гидрораспределителей под действием соответствующих пружин занимают исходную позицию, показанную на чертеже, в силу чего все рабочие полости 5, 6, 9, 10 гидроцилиндра 10 являются запертыми.
Для обеспечения выдвижения выходного звена (штока 8) гидроцилиндра 1 из его исходного втянутого положения, показанного на чертеже, подают напряжение на левый (по чертежу) электромагнит гидрораспределителя 15, правые (по чертежу) электромагниты гидрораспределителей 16 и 17 и электромагнит двухпозиционного гидрораспределителя 24. В результате этого поршневая полость 5 гидроцилиндра 1 оказывается соединенной с источником 19 потока рабочей жидкости, штоковая 6 и поршневая 9 полости оказываются соединенными со сливом 20, а штоковая полость 10 - с источником 25 повышенного давления. Благодаря повышенному давлению в штоковой полости 10, обусловленному последним соединением, даже при наличии на штоке 8 попутной (тянущей) нагрузки (а тем более при встречной нагрузке) поршень 7 со штоком 8 удерживаются в исходном втянутом положении относительно поршня 3 со штоком 4 (при силовом контакте между ними в осевом направлении со стороны полости 9).
Рабочая жидкость, поступающая в поршневую полость 5 от источника 19, воздействуя на поршень 3, вызывает его перемещение вместе со штоком 4, поршнем 7 и штоком 8 относительно корпуса 2 гидроцилиндра 1 при одновременном увеличении объема жидкости в полости 5. В итоге происходит выдвижение штока 8. При этом рабочая жидкость из штоковой полости 6 гидроцилиндра вытесняется на слив 20 при уменьшении текущего объема полости 6. В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, воспринимаются лишь жидкостью, заключенной в поршневой 5 и штоковой 6 полостях гидроцилиндра 1 и присоединенных к ним гидролиниях.
На данном этапе работы гидроцилиндра 1 при необходимости поршень 3, а тем самым и шток 8, может быть остановлен в любом промежуточном положении путем обесточивания ранее включенных электромагнитов гидрораспределителей 15 и 16 и тем самым запирания полостей 5 и 6.
При приближении поршня 3 со штоком 4 к крайнему выдвинутому положению штока 4, что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточиваются правый (по чертежу) электромагнит гидрораспределителя 17 и электромагнит гидрораспределителя 24 и подается напряжение на левый (по чертежу) электромагнит гидрораспределителя 17 и на правый (по чертежу) электромагнит гидрораспределителя 18. В результате этого поршневая полость 9 гидроцилиндра 1 так же, как и его поршневая полость 5, оказывается соединенной с источником 19 потока рабочей жидкости, а штоковая полость так же, как и штоковая полость 6, оказывается соединенной со сливом 20, благодаря чему создаются предпосылки для осуществления выдвижения поршня 7 со штоком 8 относительно поршня 3 со штоком 4.
Из-за того, что поршневые полости 5 и 9 соединены с общим источником 19 потока рабочей жидкости, а эффективная площадь поршня 7 со стороны полости 9 меньше, чем эффективная площадь поршня 3 со стороны полости 5, такое движение при наличии встречной нагрузки на штоке 8 может начаться лишь после того, как поршень 3 дойдет до упора в торец корпуса 2 со стороны полости 6 (при, соответственно, крайнем выдвинутом положении штока 4). При достижении поршнем 3 указанного крайнего положения, что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточивается левый электромагнит гидрораспределителя 15, и подается напряжение на электромагнит гидрораспределителя 21, после чего поршневая полость 5, объем жидкости в которой при этом имеет максимальное значение, соединяется с источником 25 повышенного давления.
Усилие, с которым жидкость, находящаяся в полости 5, прижимает поршень 3, ограничивающий данную полость, к торцу корпуса 2 со стороны полости 6, являющемуся для поршня 3 упором в осевом направлении, гарантированно превышает внешнее усилие, приложенное к штоку 8. Поэтому при изменениях внешнего усилия, действующего на шток 8 гидроцилиндра 1, поршень 3 не меняет свое положение относительно корпуса 2, и порция рабочей жидкости, заключенная в поршневой полости 5, ограниченной поршнем 3, не воспринимает изменений внешнего усилия и не деформируется, то есть исключается из участия в процессе перемещения выходного звена (штока 8) гидроцилиндра 1.
Рабочая жидкость, поступающая в поршневую полость 9 от источника 19, воздействуя на поршень 7, вызывает его перемещение вместе со штоком 8 относительно поршня 3 со штоком 4 и тем самым относительно корпуса 2 гидроцилиндра 1 при одновременном увеличении объема жидкости в полости 9. В итоге выдвижение штока 8 продолжается. При этом рабочая жидкость из штоковой полости 10 гидроцилиндра вытесняется на слив 20 при уменьшении текущего объема полости 10. В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, воспринимаются лишь жидкостью, заключенной в поршневой 9 и штоковой 10 полостях гидроцилиндра 1 и присоединенных к ним гидролиниях.
На данном этапе работы гидроцилиндра 1 при необходимости поршень 7, а тем самым и шток 8, может быть остановлен в любом промежуточном положении путем обесточивания ранее включенных электромагнитов гидрораспределителей 17 и 18 и тем самым запирания полостей 9 и 10.
После полного выдвижения штока 8 до упора поршня 7 в торец штока 4 со стороны полости 10, что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточивается левый (по чертежу) электромагнит гидрораспределителя 17, и подается напряжение на электромагнит гидрораспределителя 23, после чего поршневая полость 9, объем жидкости в которой при этом имеет максимальное значение, соединяется с источником 25 повышенного давления.
Усилие, с которым жидкость, находящаяся в полости 9, прижимает поршень 7, ограничивающий данную полость, к торцу штока 4 со стороны полости 10, являющемуся для поршня 7 упором в осевом направлении, гарантированно превышает внешнее усилие, приложенное к штоку 8. Поэтому при изменениях внешнего усилия, действующего на шток 8 гидроцилиндра 1, поршень 7 не меняет свое положение относительно штока 4, а тем самым и относительно корпуса 2, и порция рабочей жидкости, заключенная в поршневой полости 9, ограниченной поршнем 7, не воспринимает изменений внешнего усилия и не деформируется, то есть исключается из участия в процессе перемещения выходного звена (штока 8) гидроцилиндра 1.
В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, вообще не воспринимаются жидкостью, заключенной в полостях гидроцилиндра 1 и присоединенных к ним гидролиниях, то есть гидроцилиндр по отношению к внешней нагрузке ведет себя как соответствующая металлоконструкция.
Для обеспечения втягивания выходного звена (штока 8) гидроцилиндра 1 из выдвинутого положения обесточивают правый (по чертежу) электромагнит гидрораспределителя 18 и электромагнит гидрораспределителя 23 и подают напряжение на левый (по чертежу) электромагнит гидрораспределителя 18 и правый (по чертежу) электромагнит гидрораспределителя 17. В результате этого штоковая полость 10 гидроцилиндра 1 оказывается соединенной с источником 19 потока рабочей жидкости, а поршневая полость 9 - со сливом. Правый (по чертежу) электромагнит трехпозиционного гидрораспределителя 16 и электромагнит двухпозиционного гидрораспределителя 21 при этом остаются под напряжением. Поэтому штоковая полость 6 остается соединенной со сливом 20, а поршневая полость 5 - с источником 25 повышенного давления. Благодаря повышенному давлению в поршневой полости 5 поршень 3 со штоком 4 удерживаются в выдвинутом неподвижном положении относительно корпуса 2 (при силовом контакте между ними в осевом направлении со стороны полости 6).
Рабочая жидкость, поступающая в штоковую полость 10 от источника 19, воздействуя на поршень 7, вызывает его перемещение (втягивание) вместе со штоком 8 относительно поршня 3 со штоком 4 и тем самым относительно корпуса 2 гидроцилиндра 1 при одновременном увеличении объема жидкости в полости 10. При этом рабочая жидкость из поршневой полости 9 гидроцилиндра вытесняется на слив 20 при уменьшении текущего объема полости 9. В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, воспринимаются лишь жидкостью, заключенной в штоковой 10 и поршневой 9 полостях гидроцилиндра 1 и присоединенных к ним гидролиниях.
На данном этапе работы гидроцилиндра 1 при необходимости поршень 7, а тем самым и шток 8, может быть остановлен в любом промежуточном положении путем обесточивания ранее включенных электромагнитов гидрораспределителей 18 и 17 и тем самым запирания полостей 10 и 9.
При приближении поршня 7 со штоком 8 к крайнему втянутому их положению относительно поршня 3 со штоком 4, что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточиваются правый (по чертежу) электромагнит гидрораспределителя 16 и электромагнит гидрораспределителя 21 и подается напряжение на левый (по чертежу) электромагнит гидрораспределителя 16 и на правый (по чертежу) электромагнит гидрораспределителя 15. В результате этого штоковая полость 6 гидроцилиндра 1 так же, как и его штоковая полость 10, оказывается соединенной с источником 19 потока рабочей жидкости, а поршневая полость 5 так же, как и поршневая полость 9, оказывается соединенной со сливом 20, благодаря чему создаются предпосылки для осуществления втягивания поршня 3 со штоком 4 относительно корпуса 2.
По окончании втягивания поршня 7 со штоком 8 относительно поршня 3 со штоком 4 (при этом они вступают в силовой контакт в осевом направлении со стороны полости 9), что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточивается левый (по чертежу) электромагнит гидрораспределителя 18, и подается напряжение на электромагнит гидрораспределителя 24, после чего штоковая полость 10, объем жидкости в которой при этом имеет максимальное значение, соединяется с источником 25 повышенного давления.
Усилие, с которым жидкость, находящаяся в полости 10, прижимает поршень 7 со штоком 8, ограничивающим данную полость, к торцу поршня 3 со штоком 4 со стороны полости 9, являющимися для поршня 7 упором в осевом направлении, гарантированно превышает внешнее усилие, приложенное к штоку 8. Поэтому при изменениях внешнего усилия, действующего на шток 8 гидроцилиндра 1, поршень 7 со штоком 8 не меняют свое положение относительно поршня 3 со штоком 4, и порция рабочей жидкости, заключенная в штоковой полости 10, ограниченной поршнем 7 со штоком 8, не воспринимает изменений внешнего усилия и не деформируется, то есть исключается из участия в процессе перемещения выходного звена (штока 8) гидроцилиндра 1.
Рабочая жидкость, поступающая в штоковую полость 6 от источника 19, воздействуя на поршень 3, вызывает его перемещение вместе со штоком 4, поршнем 7 и штоком 8 относительно корпуса 2 гидроцилиндра 1 при одновременном увеличении объема жидкости в полости 6. В итоге втягивание штока 8 продолжается. При этом рабочая жидкость из поршневой полости 5 гидроцилиндра вытесняется на слив 20 при уменьшении текущего объема полости 5. В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, воспринимаются лишь жидкостью, заключенной в штоковой 6 и поршневой 5 полостях гидроцилиндра 1 и присоединенных к ним гидролиниях.
На данном этапе работы гидроцилиндра 1 при необходимости поршень 3, а тем самым и шток 8, может быть остановлен в любом промежуточном положении путем обесточивания ранее включенных электромагнитов гидрораспределителей 16 и 15 и тем самым запирания полостей 6 и 5.
После втягивания поршня 3 со штоком 4 (и движущимися вместе с ними поршнем 7 со штоком 8) до упора поршня 3 в торец корпуса 2 со стороны полости 5, что фиксируется с помощью соответствующего концевого выключателя или датчика перемещения (на чертеже концевой выключатель или датчик перемещения не показаны), обесточивается левый (по чертежу) электромагнит гидрораспределителя 16, и подается напряжение на электромагнит гидрораспределителя 22, после чего штоковая полость 6, объем жидкости в которой при этом имеет максимальное значение, соединяется с источником 25 повышенного давления.
Усилие, с которым жидкость, находящаяся в полости 6, прижимает поршень 3 со штоком 4, ограничивающими данную полость, к торцу корпуса 2 со стороны полости 5, являющемуся для поршня 3 упором в осевом направлении, гарантированно превышает внешнее усилие, приложенное к штоку 8. Поэтому при изменениях внешнего усилия, действующего на шток 8 гидроцилиндра 1, поршень 3 не меняет свое положение относительно корпуса 2, и порция рабочей жидкости, заключенная в штоковой полости 6, ограниченной поршнем 3 со штоком 4, не воспринимает изменений внешнего усилия и не деформируется, то есть исключается из участия в процессе перемещения выходного звена (штока 8) гидроцилиндра 1.
В рассматриваемой ситуации изменения внешнего усилия, приложенного к штоку 8, вообще не воспринимаются жидкостью, заключенной в полостях гидроцилиндра 1 и присоединенных к ним гидролиниях, то есть гидроцилиндр по отношению к внешней нагрузке ведет себя как соответствующая металлоконструкция.
В соответствии с вышесказанным, при использовании предлагаемого способа управления многополостным гидроцилиндром при любом положении его выходного звена объем жидкости, воспринимающей усилие на выходном звене и определяющей текущее значение коэффициента жесткости гидроцилиндра, не превышает объем одной рабочей полости гидроцилиндра, соединенной в текущий момент времени с напорной гидролинией, и объем одной его рабочей полости, соединенной в текущий момент времени со сливом.
Таким образом, предлагаемый способ управления многополостным гидроцилиндром обеспечивает сохранение высокого коэффициента жесткости гидроцилиндра на всем протяжении хода его выходного звена вне зависимости от величины хода.
Источники информации
1. Телескопический цилиндр двустороннего действия: Авторское свидетельство СССР №1420253. МКИ F 15 В 15/16. Заявлено 26.12.1978. Опубликовано 30.08.1988.
2. Силовой гидравлический привод: Авторское свидетельство СССР №1240964. МКИ F 15 В 15/14. Заявлено 10.02.1984. Опубликовано 30.06.1986.
3. Телескопический силовой гидроцилиндр двустороннего действия: Авторское свидетельство СССР №1436590. МКИ F 15 В 15/16. Заявлено 23.07.1986. Опубликовано 30.01.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕССА | 2003 |
|
RU2250828C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2011 |
|
RU2455536C1 |
| СПОСОБ ВЫТЯЖКИ ИЗДЕЛИЙ ИЗ ЛИСТОВЫХ ЗАГОТОВОК | 2005 |
|
RU2302920C1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ СТВОРОК РАЗДВИЖНОЙ ЧАСТИ КРОВЛИ СТАДИОНА | 2014 |
|
RU2556098C1 |
| ГИДРОПРИВОД ПЕРЕДНЕЙ ГОЛОВКИ ПРАВИЛЬНО-РАСТЯЖНОЙ МАШИНЫ | 2013 |
|
RU2536734C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| ПУЛЬСАТОРНЫЙ ГИДРОПРИВОД РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241565C1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| ПРОКАТНАЯ КЛЕТЬ С ГИДРАВЛИЧЕСКИМ НАЖИМНЫМ УСТРОЙСТВОМ | 2006 |
|
RU2307715C1 |
Способ предназначен для управления многополостным гидроцилиндром. Способ включает подачу рабочей жидкости в рабочую полость 5 гидроцилиндра 1 для обеспечения движения его выходного звена 8 в одном направлении и соединение указанной полости 5 со сливом при осуществлении движения выходного звена 8 в обратном направлении. После увеличения объема рабочей полости 5 гидроцилиндра 1 вследствие подачи в нее рабочей жидкости до максимального значения, соответствующего перемещению до упора подвижного звена 3, ограничивающего данную полость, порцию жидкости, заключенную в указанной полости 5, исключают из участия в процессе перемещения выходного звена 8 гидроцилиндра 1 путем соединения данной полости 5 с источником 25 повышенного давления, превышающего максимальное рабочее давление, необходимое для преодоления внешней нагрузки на выходном звене 8 гидроцилиндра 1, а при движении выходного звена 8 гидроцилиндра 1 в обратном направлении рабочие полости гидроцилиндра 1, соединенные с источником 25 повышенного давления, последовательно отсоединяют от источника 25 повышенного давления и соединяют со сливом 20. Технический результат - сохранение высокого коэффициента жесткости многополостного гидроцилиндра на всем протяжении хода его выходного звена. 1 ил.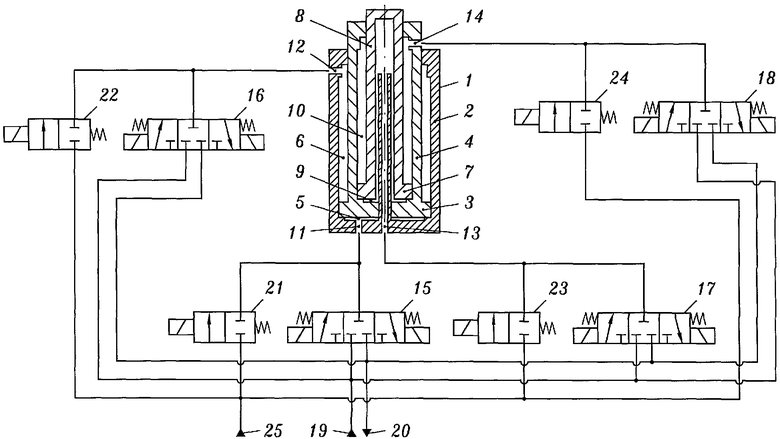
Способ управления многополостным гидроцилиндром, содержащим, по меньшей мере, две рабочие полости, предназначенные для обеспечения движения выходного звена гидроцилиндра в одном и том же направлении при подаче в них рабочей жидкости и имеющие индивидуальные каналы для подвода и отвода рабочей жидкости, не сообщающиеся внутри гидроцилиндра между собой, включающий подачу рабочей жидкости в рабочую полость гидроцилиндра для обеспечения движения его выходного звена в одном направлении и соединение указанной полости со сливом при осуществлении движения выходного звена в обратном направлении, отличающийся тем, что после увеличения объема рабочей полости гидроцилиндра вследствие подачи в нее рабочей жидкости до максимального значения, соответствующего перемещению до упора подвижного звена, ограничивающего данную полость, порцию жидкости, заключенную в указанной полости, исключают из участия в процессе перемещения выходного звена гидроцилиндра путем соединения данной полости с источником повышенного давления, превышающего максимальное рабочее давление, необходимое для преодоления внешней нагрузки на выходном звене гидроцилиндра, а при движении выходного звена гидроцилиндра в обратном направлении рабочие полости гидроцилиндра, соединенные с источником повышенного давления, последовательно отсоединяют от источника повышенного давления и соединяют со сливом.
| ТЕЛЕСКОПИЧЕСКИЙ СИЛОВОЙ ГИДРОЦИЛИНДР ДВУСТОРОННЕГО ДЕЙСТВИЯ | 1986 |
|
SU1436590A1 |
| Силовой гидравлический привод | 1984 |
|
SU1240964A1 |
| Телескопический цилиндр двустороннего действия | 1978 |
|
SU1420253A1 |
| DE 4029579 A1, 19.03.1992 | |||
| ВЗРЫВОБЕЗОПАСНЫЙ ПРОЦЕСС ЭМУЛЬСИОННОЙ ПОЛИМЕРИЗАЦИИ ДЛЯ ПОЛУЧЕНИЯ ПОЛИТЕТРАФТОРЭТИЛЕНА | 2001 |
|
RU2302430C2 |

