Изобретение относится к области объемного гидропривода, а именно к способам управления электрогидравлическими следящими приводами с машинно-дроссельным управлением, работающими при наличии ограничения на максимальное значение мощности, потребляемой насосом, и может быть использовано, например, на мобильных и стационарных машинах с приводом регулируемого насоса от вала отбора мощности двигателя, используемого для привода других насосов и механизмов, а также при использовании для привода насоса индивидуального двигателя, номинальная мощность которого меньше номинальной мощности регулируемого насоса.
Известен способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, содержащим регулируемый насос, выполненный с регулятором давления, гидродвигатель, дросселирующий гидрораспределитель с пропорциональным электрическим управлением, напорный канал которого соединен с напорным каналом насоса, сливной канал с гидробаком, а исполнительные каналы с рабочими полостями гидродвигателя, задатчик управляющего сигнала и контроллер, заключающийся в том, что на основании управляющего сигнала, подаваемого на соответствующий вход контроллера со стороны задатчика, формируют управляющий сигнал, подаваемый с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя [1]. При использовании указанного способа управления гидроприводом подача насоса определяется сигналом, подаваемым с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя, и (при пренебрежении утечками и перетечками рабочей жидкости) равна расходу жидкости, поступающему к гидродвигателю, а давление в напорном канале насоса поддерживается практически постоянным на уровне настройки регулятора давления насоса вне зависимости от нагрузки (силового параметра: силы для гидроприводов поступательного движения или вращающего момента для гидроприводов поворотного и вращательного движения) на выходном звене гидродвигателя (штоке, плунжере или корпусе гидроцилиндра в гидроприводах поступательного движения либо валу или корпусе поворотного гидродвигателя или гидромотора соответственно в гидроприводах поворотного и вращательного движения). В результате имеют место потери мощности, которые тем больше, чем меньше нагрузка на выходном звене гидродвигателя, что является недостатком известного способа управления. Кроме того, при использовании данного способа управления не обеспечивается ограничение максимального значения мощности, потребляемой насосом, что необходимо при наличии ограничения на указанное значение мощности по условиям эксплуатации электрогидравлического следящего привода.
Наиболее близким к заявляемому техническому решению является принятый в качестве прототипа способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, содержащим регулируемый насос, оснащенный регулятором расхода (LS-регулятором), гидродвигатель, дросселирующий гидрораспределитель с пропорциональным электрическим управлением, напорный канал которого соединен с напорным каналом насоса, сливной канал с гидробаком, а исполнительные каналы с рабочими полостями гидродвигателя, задатчик управляющего сигнала и контроллер, заключающийся в том, что на основании управляющего сигнала, подаваемого на соответствующий вход контроллера со стороны задатчика, формируют управляющий сигнал, подаваемый с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя [2]. При использовании указанного способа управления электрогидравлическим приводом подача насоса (при пренебрежении утечками и перетечками рабочей жидкости) равна расходу жидкости, поступающему к гидродвигателю, а давление в напорном канале насоса изменяется в соответствии с текущими фактическими изменениями силового параметра на выходном звене гидродвигателя (а точнее, в соответствии с изменениями давления в напорной полости гидродвигателя), при этом потери давления в гидроприводе (включая потери давления на рабочих окнах гидрораспределителя) вне зависимости от значения силового параметра (при изменении его в пределах рабочего диапазона) в идеале поддерживаются на установленном уровне, минимально необходимом для осуществления задач регулирования контролируемого параметра, благодаря чему обеспечивается повышенный коэффициент полезного действия электрогидравлического привода. При незначительных потерях давления в гидролиниях по сравнению с потерями давления на рабочих окнах дросселирующего гидрораспределителя при рассматриваемом способе управления перепад давления на рабочих окнах гидрораспределителя поддерживается практически постоянным. При постоянном перепаде давления на напорном рабочем окне гидрораспределителя расход рабочей жидкости, поступающей через него в гидродвигатель и, соответственно, скорость движения выходного звена гидродвигателя теоретически не зависят от изменений нагрузки на выходном звене гидродвигателя (при изменении нагрузки в определенных пределах) и определяются лишь текущим значением площади проходного сечения рабочего окна гидрораспределителя, которое в свою очередь определяется управляющим электрическим сигналом, поступающим со стороны контроллера на электрический блок управления гидрораспределителя.
Здесь и далее по тексту описания изобретения рабочая полость гидродвигателя, которая в текущий момент времени соединена посредством дросселирующего гидрораспределителя с напорной гидролинией насоса, называется напорной, а рабочее окно дросселирующего гидрораспределителя, через которое рабочая жидкость поступает в напорную полость гидродвигателя, называется напорным рабочим окном.
Однако при использовании известного способа управления не обеспечивается ограничение максимального значения мощности, потребляемой насосом, что необходимо при наличии ограничения на указанное значение мощности по условиям эксплуатации электрогидравлического следящего привода. Это сужает область применения данного способа управления и является его недостатком.
Технической задачей, решаемой изобретением, является расширение области применения способа управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, в составе которого используется регулируемый насос, оснащенный регулятором расхода (LS-регулятором), для случаев, когда существует ограничение на максимальное значение мощности, потребляемой регулируемым насосом, благодаря автоматическому исключению превышением мощностью, потребляемой насосом, предельно допустимого максимального значения.
Для решения поставленной задачи в известном способе управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, содержащим регулируемый насос, оснащенный регулятором расхода, гидродвигатель, дросселирующий гидрораспределитель с пропорциональным электрическим управлением, напорный канал которого соединен с напорным каналом насоса, сливной канал с гидробаком, а исполнительные каналы с рабочими полостями гидродвигателя, задатчик управляющего сигнала и контроллер, заключающемся в том, что на основании управляющего сигнала, подаваемого на соответствующий вход контроллера со стороны задатчика, формируют управляющий сигнал, подаваемый с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя, согласно изобретению при наличии ограничения на максимальное значение мощности, потребляемой насосом, и при увеличении в соответствии с управляющим сигналом задатчика потребляемой насосом мощности до предельно допустимого максимального значения на электрический блок управления дросселирующего гидрораспределителя подают управляющий сигнал, формируемый посредством контроллера исходя из условия обеспечения текущего значения потребляемой насосом мощности, равного предельно допустимому максимальному значению мощности.
В частных случаях реализации предлагаемый способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением характеризуется следующими отличительными признаками.
Согласно изобретению текущее значение мощности, потребляемой насосом, вычисляют в контроллере на основании текущих значений вращающего момента и угловой скорости вращения вала насоса.
Согласно изобретению текущее значение мощности, потребляемой насосом при приводе его от электродвигателя, вычисляют в контроллере на основании текущего значения активной мощности, потребляемой приводящим электродвигателем насоса.
Согласно изобретению текущее значение мощности, потребляемой насосом, вычисляют в контроллере на основании текущих значений давления и расхода рабочей жидкости в напорной гидролинии насоса и экспериментально установленных значений коэффициента полезного действия насоса в функции давления насоса.
Согласно изобретению при увеличении потребляемой насосом мощности в соответствии с управляющим сигналом задатчика до предельно допустимого максимального значения на электрический блок управления дросселирующего гидрораспределителя подают управляющий сигнал, формируемый посредством контроллера в соответствии с экспериментально определенной зависимостью между давлением в напорной гидролинии насоса и значением управляющего сигнала, которому соответствует значение мощности, потребляемой насосом, равное предельно допустимому максимальному значению мощности.
Подача на электрический блок управления дросселирующего гидрораспределителя управляющего сигнала, формируемого посредством контроллера исходя из условия обеспечения текущего значения потребляемой насосом мощности, равного предельно допустимому максимальному значению мощности, при увеличении потребляемой насосом мощности в соответствии с управляющим сигналом задатчика до предельно допустимого максимального значения расширяет область применения способа для случаев, когда по условиям эксплуатации электрогидравлического следящего привода существует ограничение на максимальное значение мощности, потребляемой регулируемым насосом.
При вычислении текущего значения мощности, потребляемой регулируемым насосом, на основании текущих значений вращающего момента и угловой скорости вращения вала насоса, обеспечивается наиболее высокая точность определения указанной мощности. Однако этот способ определения мощности, потребляемой насосом, предполагает применение датчиков вращающего момента и угловой скорости вращения, что усложняет конструкцию электрогидравлического привода.
Вычисление текущего значения мощности, потребляемой регулируемым насосом в случае его привода от электродвигателя, на основании текущего значения активной мощности, потребляемой приводящим электродвигателем насоса, технически более просто осуществимо, но дает менее точный результат из-за погрешностей в учете потерь мощности собственно в электродвигателе.
При вычислении текущего значения мощности, потребляемой регулируемым насосом, на основании текущих значений давления и расхода рабочей жидкости в напорной гидролинии насоса и экспериментально установленных значений коэффициента полезного действия насоса в функции давления обеспечивается достаточно высокая точность определения указанной мощности. Такой способ определения мощности, потребляемой насосом, предполагает оснащение электрогидравлического привода датчиками давления и расхода.
Управление электрогидравлическим следящим приводом при увеличении потребляемой насосом мощности в соответствии с управляющим сигналом задатчика до предельно допустимого максимального значения путем подачи на электрический блок управления дросселирующего гидрораспределителя управляющего сигнала, формируемого посредством контроллера в соответствии с экспериментально определенной зависимостью между давлением в напорной гидролинии насоса и значением управляющего сигнала, которому соответствует значение мощности, потребляемой насосом, равное предельно допустимому максимальному значению, технически наиболее просто осуществимо, поскольку, как правило, в напорной гидролинии насоса всегда устанавливается датчик давления.
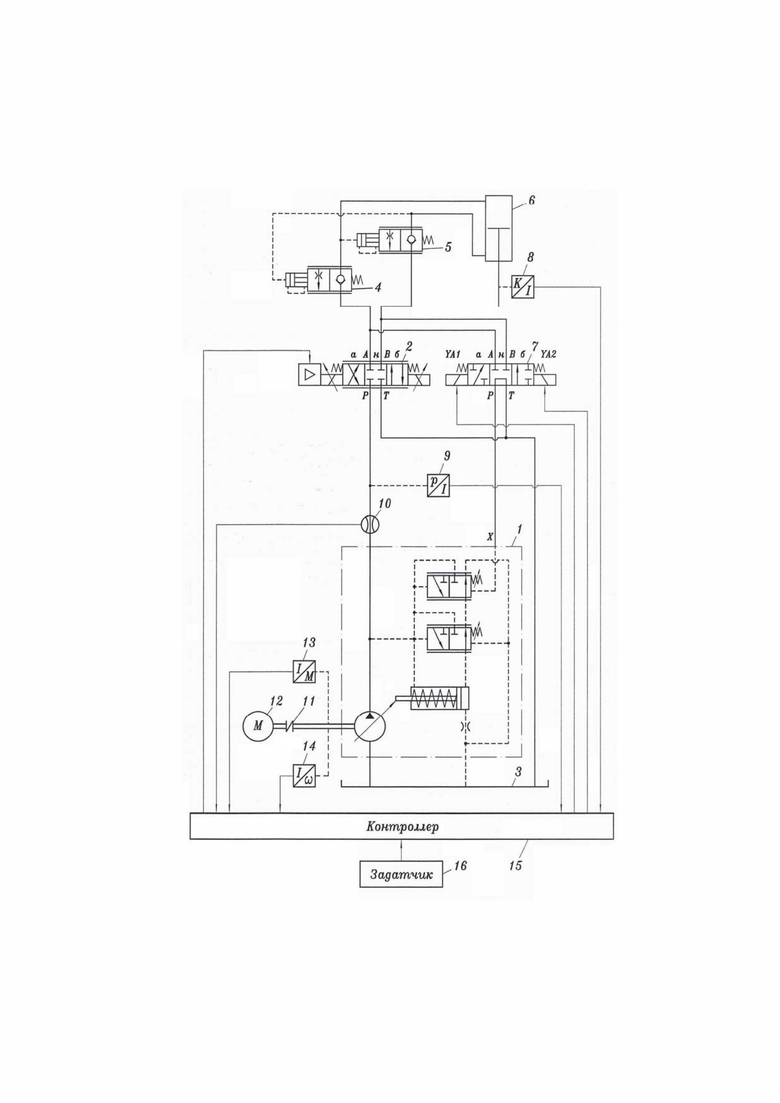
Сущность изобретения поясняется чертежом, на котором приведен один из возможных вариантов исполнения принципиальной схемы электрогидравлического следящего привода с машинно-дроссельным управлением, в состав которого входит регулируемый насос, оснащенный регулятором расхода (насос с LS-управлением).
Электрогидравлический следящий привод включает в свой состав регулируемый насос 1, выполненный с регулятором расхода (на чертеже насос 1 помимо регулятора расхода имеет в своем составе регулятор давления), четырехлинейный трехпозиционный дросселирующий гидрораспределитель 2 с пропорциональным электрическим управлением, напорный канал Р которого соединен с напорным каналом насоса 1, сливной канал Т с гидробаком 3, а исполнительные каналы А и В посредством тормозных клапанов соответственно 4 и 5 с рабочими полостями гидродвигателя 6 двухстороннего действия, и четырехлинейный трехпозиционный направляющий гидрораспределитель 7 с электрическим управлением с электромагнитами YA1 и YA2, напорный канал Р которого соединен с каналом Х LS-управления насоса 1, сливной канал Т с гидробаком 3, а исполнительные каналы А и В с исполнительными каналами соответственно А и В дросселирующего гидрораспределителя 2.
Управление гидрораспределителем 2 может быть пропорциональным электрогидравлическим. В качестве гидрораспределителя 2 может использоваться сервоклапан.
На чертеже гидродвигатель 6 изображен как поршневой гидроцилиндр двухстороннего действия с односторонним штоком. В общем случае это может быть поршневой гидроцилиндр двухстороннего действия с двухсторонним штоком (дифференциальный или недифференциальный), два плунжерных гидроцилиндра, работающие друг против друга, гидромотор или поворотный гидродвигатель.
Выходным звеном гидродвигателя (гидроцилиндра) 6 в рассматриваемом случае является его шток. Выходное звено (шток) гидродвигателя (гидроцилиндра) 6 в общем случае снабжено датчиком 8 регулируемого (контролируемого) параметра К (положения, скорости или нагрузки).
Тормозные клапаны 4 и 5 предназначены для исключения неуправляемого движения выходного звена (штока) гидродвигателя (гидроцилиндра) 6 при работе его с попутной нагрузкой, то есть с нагрузкой, действующей в направлении движения выходного звена, путем создания необходимого подпора в сливной полости гидродвигателя при принятом ограниченном перепаде давления на рабочих окнах гидрораспределителя 2.
В исходной нейтральной позиции «н» дросселирующего гидрораспределителя 2 все его каналы перекрыты, в первой рабочей позиции «а» исполнительный канал В соединен с напорным каналом Р, а исполнительный канал А соединен со сливным каналом Т, во второй рабочей позиции «б» наоборот: исполнительный канал А соединен с напорным каналом Р, а исполнительный канал В соединен со сливным каналом Т.
В исходной нейтральной позиции «н» направляющего гидрораспределителя 7 его напорный канал Р соединен со сливным каналом Т, а исполнительные каналы А и В перекрыты, в первой рабочей позиции «а» исполнительный канал В соединен с напорным каналом Р, а исполнительный канал А и сливной канал Т перекрыты, во второй рабочей позиции «б» исполнительный канал А соединен с напорным каналом Р, а исполнительный канал В и сливной канал Т перекрыты.
Направляющий гидрораспределитель 7 предназначен для соединения канала Х LS-управления насоса 1 с тем из исполнительных каналов А и В дросселирующего гидрораспределителя 2, который в текущий момент времени соединен с напорным каналом Р дросселирующего гидрораспределителя.
Для измерения давления и расхода в напорной гидролинии насоса 1 установлены соответственно датчик 9 давления и датчик 10 расхода рабочей жидкости.
Вал насоса 1 посредством муфты 11 соединен с валом приводящего электродвигателя 12. Для измерения вращающего момента на валу насоса 1 и угловой скорости вращения вала насоса 1 в общем случае установлены соответственно датчик 13 вращающего момента и датчик 14 угловой скорости вращения.
Управление электрогидравлическим следящим приводом осуществляется посредством контроллера 15. Для формирования управляющего сигнала, определяющего требуемый характер изменения регулируемого (контролируемого) параметра К привода, предназначен задатчик 16. При этом задатчик 16 и имеющиеся в составе привода датчики 8, 9, 10, 13, 14 соединены с соответствующими входными каналами контроллера 15, а электрический блок управления дросселирующего гидрораспределителя 2 и электромагниты YA1 и YA2 направляющего гидрораспределителя 7 соединены с соответствующими выходными каналами контроллера 15.
Предлагаемый способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением реализуется следующим образом.
При управляющем сигнале со стороны контроллера 15 на электрический блок управления дросселирующего гидрораспределителя 2, соответствующем исходной нейтральной позиции «н» дросселирующего гидрораспределителя 2, электромагниты YA1 и YA2 направляющего гидрораспределителя 7 посредством контроллера 15 автоматически обесточены, и направляющий гидрораспределитель 7 так же, как и дросселирующий гидрораспределитель 2, занимает свою исходную нейтральную позицию «н». В данном случае рабочие полости гидродвигателя 6 посредством дросселирующего гидрораспределителя 2 заперты, а каналы Р и Т направляющего гидрораспределителя 7 соединены между собой, вследствие чего канал Х LS-управления насоса 1 соединен с гидробаком 3. Благодаря последнему соединению, регулятор расхода насоса 1 поддерживает в напорной гидролинии насоса давление, превышающее давление в гидробаке 3 на величину давления настройки указанного регулятора (это давление составляет, как правило, порядка 2 МПа) (см.: Гойдо М.Е. Снижение потерь энергии при работе объемных гидроприводов с управлением // Справочник. Инженерный журнал. 2014. №1. С.18-28) при подаче насоса, необходимой для компенсации перетечек. Соответственно, в данном случае потребляемая насосом мощность является незначительной.
На основании управляющего сигнала, подаваемого на соответствующий вход контроллера 15 со стороны задатчика 16, и сигнала отрицательной обратной связи, поступающего на соответствующий вход контроллера 15 со стороны датчика 8 регулируемого (контролируемого) параметра К (при наличии в составе электрогидравлической системы такого датчика) формируется управляющий сигнал, подаваемый с выхода контроллера 15 на электрический блок управления дросселирующего гидрораспределителя 2, вызывающий изменение положения золотника гидрораспределителя 2 и коммутации рабочих полостей гидродвигателя 6 с напорным каналом насоса 1 и гидробаком 3 таким образом, что осуществляется отработка поступившего с задатчика 16 управляющего сигнала.
Одновременно с подачей управляющего сигнала с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя 2 подается электрическое напряжение на тот из электромагнитов YA1 и YA2 направляющего гидрораспределителя 7, при срабатывании которого канал Х LS-управления насоса 1 соединяется с исполнительным каналом дросселирующего гидрораспределителя 2, соединенным в текущий момент времени в напорным каналом Р дросселирующего гидрораспределителя. Другими словами, при смещении золотника дросселирующего гидрораспределителя 2 в позицию «а» подается сигнал на электромагнит YA1 направляющего гидрораспределителя 7, а при смещении золотника дросселирующего гидрораспределителя 2 в позицию «б» подается сигнал на электромагнит YA2 направляющего гидрораспределителя 7. В результате, всегда регулятор расхода насоса 1 при подаче управляющего сигнала на электрический блок управления дросселирующего гидрораспределителя 2 воспринимает перепад давления на напорном рабочем окне этого гидрораспределителя и поддерживает его постоянным, обеспечивая автоматически изменение рабочего объема насоса и его подачи в соответствии с величиной вышеупомянутого управляющего сигнала.
При работе электрогидравлического привода в контроллере 15 производится анализ соотношения текущего значения мощности N, потребляемой насосом 1, и предельно допустимого максимального значения этой мощности Nдоп.
Если привод укомплектован датчиком 13 вращающего момента на валу насоса 1 и датчиком 14 угловой скорости вращения этого вала, то на основании сигналов этих датчиков текущее значение потребляемой насосом мощности N вычисляется в контроллере 15 по формуле:
N=Mω,
где M - вращающий момент на валу насоса 1;
ω - угловая скорость вращения вала насоса 1.
При отсутствии в составе привода датчиков 13 и 14 и использовании для привода насоса 1 электродвигателя 12 (в общем-то это может быть двигатель внутреннего сгорания или турбина) возможно определение текущего значения потребляемой насосом мощности N на основании измерения текущего значения активной мощности Nдв.а указанного электродвигателя:
N= ηдвNдв.а ,
где ηдв - коэффициент полезного действия (КПД) электродвигателя 12.
Вместо непосредственного измерения текущего значения активной мощности Nдв.а приводящего электродвигателя 12 насоса 1 возможно определение значения Nдв.а расчетным путем на основании измерения значений линейных напряжения U и силы тока I электродвигателя. Для трехфазного электродвигателя:
Nдв.а=30,5UIcosϕ,
где cosϕ - коэффициент мощности электродвигателя.
Если привод укомплектован датчиками 9 и 10 соответственно давления и расхода рабочей жидкости в напорной гидролинии насоса 1, то на основании сигналов этих датчиков текущее значение потребляемой насосом мощности N вычисляется в контроллере 15 по формуле:
N=Qρ/ηн ,
где Q - расход рабочей жидкости в напорной гидролинии насоса 1 (подача насоса);
ρ - давление рабочей жидкости в напорной гидролинии насоса 1;
ηн - полный КПД насоса 1.
Если текущее значение мощности, потребляемой насосом 1, в соответствии с управляющим сигналом задатчика 16 увеличивается до предельно допустимого максимального значения Nдоп, то алгоритм управления электрогидравлическим приводом изменяется и регулируемым (контролируемым) параметром становится мощность N, потребляемая насосом 1. При этом на электрический блок управления дросселирующего гидрораспределителя 2 со стороны контроллера 15 подается управляющий сигнал Iмощ, формируемый исходя из условия обеспечения текущего значения потребляемой насосом мощности N, равного предельно допустимому максимальному значению мощности Nдоп (то есть из условия обеспечения равенства: N=Nдоп). Одновременно значение указанного управляющего сигнала Iмощ сравнивается со значением управляющего сигнала Iзад на электрический блок управления дросселирующего гидрораспределителя 2, который соответствует текущему значению управляющего сигнала, подаваемого на соответствующий вход контроллера 15 со стороны задатчика 16. Если выполняется условие: Iзад<Iмощ, - то приоритетным снова становится входной управляющий сигнал, формируемый посредством задатчика 16, и, таким образом, регулируемым (контролируемым) снова становится параметр К.
Если экспериментально определена зависимость Iмощ(ρ) между давлением p в напорной гидролинии насоса 1 и значением управляющего сигнала Iмощ, которому соответствует значение мощности N, потребляемой насосом, равное предельно допустимому максимальному значению мощности Nдоп, то алгоритм управления электрогидравлическим приводом существенно упрощается:
при увеличении текущего значения Iзад до значения Iмощ, соответствующего текущему значению давления p в напорной гидролинии насоса 1 (контролируемому на основании сигнала датчика давления 9), регулируемым (контролируемым) параметром является мощность, потребляемая насосом 1, и на электрический блок управления дросселирующего гидрораспределителя 2 со стороны контроллера 15 подается управляющий сигнал Iмощ в соответствии с экспериментально определенной зависимостью сигнала Iмощ от давления p;
если выполняется условие: Iзад<Iмощ(ρ), - то приоритетным является входной управляющий сигнал, формируемый посредством задатчика 16, и, таким образом, регулируемым (контролируемым) является параметр К.
В соответствии с вышеизложенным предлагаемое изобретение расширяет область применения известного способа управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, в составе которого используется регулируемый насос, оснащенный регулятором расхода (LS-регулятором), на случаи, когда существует ограничение на максимальное значение мощности, потребляемой регулируемым насосом, благодаря автоматическому исключению превышением мощностью, потребляемой насосом, предельно допустимого максимального значения.
Литературные источники:
1. Электрогидравлическая система управления: Патент RU №2641192. МПК F15B 9/04. Заявлено 12.12.2016. Опубликовано 16.01.2018.
2. Боровин Г.К., Костюк А.В., Платонов А.К. Математическое моделирование гидравлической системы управления шагающей машины // Математичні машини і системи. 2009. №4. С. 127-138 (с. 129, рис. 5, 6).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ, ЧУВСТВИТЕЛЬНЫЙ К НАГРУЗКЕ | 2020 |
|
RU2759190C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ НЕСКОЛЬКИХ ОБЪЕМНЫХ ГИДРОДВИГАТЕЛЕЙ | 2022 |
|
RU2778591C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2009 |
|
RU2421637C2 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 2020 |
|
RU2730560C1 |
| ГИДРОПРИВОД С ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2722767C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ВЫХОДНЫХ ЗВЕНЬЕВ ДВУХ ГИДРОДВИГАТЕЛЕЙ ОБЪЕМНОГО ГИДРОПРИВОДА | 2013 |
|
RU2542772C1 |
| ГИДРАВЛИЧЕСКИЙ БЛОК РЕКУПЕРАЦИИ ЭНЕРГИИ | 2018 |
|
RU2688130C1 |
| СТЕНД ДЛЯ ГИДРАВЛИЧЕСКИХ ИСПЫТАНИЙ ЕМКОСТЕЙ НА ЦИКЛИЧЕСКУЮ ДОЛГОВЕЧНОСТЬ | 2004 |
|
RU2266440C1 |
Область применения: электрогидравлические следящие приводы с машинно-дроссельным управлением и регулируемым насосом, оснащенным регулятором расхода (LS-регулятором). Техническая задача: расширение области применения способа управления приводом на случаи, когда существует ограничение на максимальное значение мощности, потребляемой насосом. Сущность: на основании управляющего сигнала, подаваемого на соответствующий вход контроллера 15 со стороны задатчика 16, формируют управляющий сигнал, подаваемый с выхода контроллера 15 на электрический блок управления дросселирующего гидрораспределителя 2, а при увеличении потребляемой регулируемым насосом 1 мощности в соответствии с управляющим сигналом задатчика 16 до предельно допустимого максимального значения на электрический блок управления дросселирующего гидрораспределителя 2 подают управляющий сигнал, формируемый посредством контроллера 15 исходя из условия обеспечения текущего значения потребляемой насосом 1 мощности, равного предельно допустимому максимальному значению мощности. 4 з.п. ф-лы, 1 ил.
1. Способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением, содержащим регулируемый насос, оснащенный регулятором расхода, гидродвигатель, дросселирующий гидрораспределитель с пропорциональным электрическим управлением, напорный канал которого соединен с напорным каналом насоса, сливной канал с гидробаком, а исполнительные каналы с рабочими полостями гидродвигателя, задатчик управляющего сигнала и контроллер, заключающийся в том, что на основании управляющего сигнала, подаваемого на соответствующий вход контроллера со стороны задатчика, формируют управляющий сигнал, подаваемый с выхода контроллера на электрический блок управления дросселирующего гидрораспределителя, отличающийся тем, что при наличии ограничения на максимальное значение мощности, потребляемой насосом, и при увеличении потребляемой насосом мощности в соответствии с управляющим сигналом задатчика до предельно допустимого максимального значения на электрический блок управления дросселирующего гидрораспределителя подают управляющий сигнал, формируемый посредством контроллера исходя из условия обеспечения текущего значения потребляемой насосом мощности, равного предельно допустимому максимальному значению мощности.
2. Способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением по п. 1, отличающийся тем, что текущее значение мощности, потребляемой насосом, вычисляют в контроллере на основании текущих значений вращающего момента и угловой скорости вращения вала насоса.
3. Способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением по п. 1, отличающийся тем, что текущее значение мощности, потребляемой насосом при приводе его от электродвигателя, вычисляют в контроллере на основании текущего значения активной мощности, потребляемой приводящим электродвигателем насоса.
4. Способ управления электрогидравлическим следящим приводом с машинно-дроссельным управлением по п. 1, отличающийся тем, что текущее значение мощности, потребляемой насосом, вычисляют в контроллере на основании текущих значений давления и расхода рабочей жидкости в напорной гидролинии насоса и экспериментально установленных значений коэффициента полезного действия насоса в функции давления насоса.
5. Способ управления электрогидравлическим следящим гидроприводом с машинно-дроссельным управлением по п. 1, отличающийся тем, что при увеличении потребляемой насосом мощности в соответствии с управляющим сигналом задатчика до предельно допустимого максимального значения на электрический блок управления дросселирующего гидрораспределителя подают управляющий сигнал, формируемый посредством контроллера в соответствии с экспериментально определенной зависимостью между давлением в напорной гидролинии насоса и значением управляющего сигнала, которому соответствует значение мощности, потребляемой насосом, равное предельно допустимому максимальному значению мощности.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2020 |
|
RU2759191C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| CN 105159263 B, 19.06.2018 | |||
| JP 2000170704 A, 20.06.2000. | |||

