Изобретение относится к радионавигации и может быть использовано на опорных наземных станциях.
Цель изобретения - повышение точности контроля.
На фиг. 1 представлена структурная электрическая схема предложенного устройства; на фиг. 2 - схема канала приема дальнего сигнала; на фиг. 3 - схема полосового фильтра; на фиг. 4 - огибающие сигналов в трактах приема.
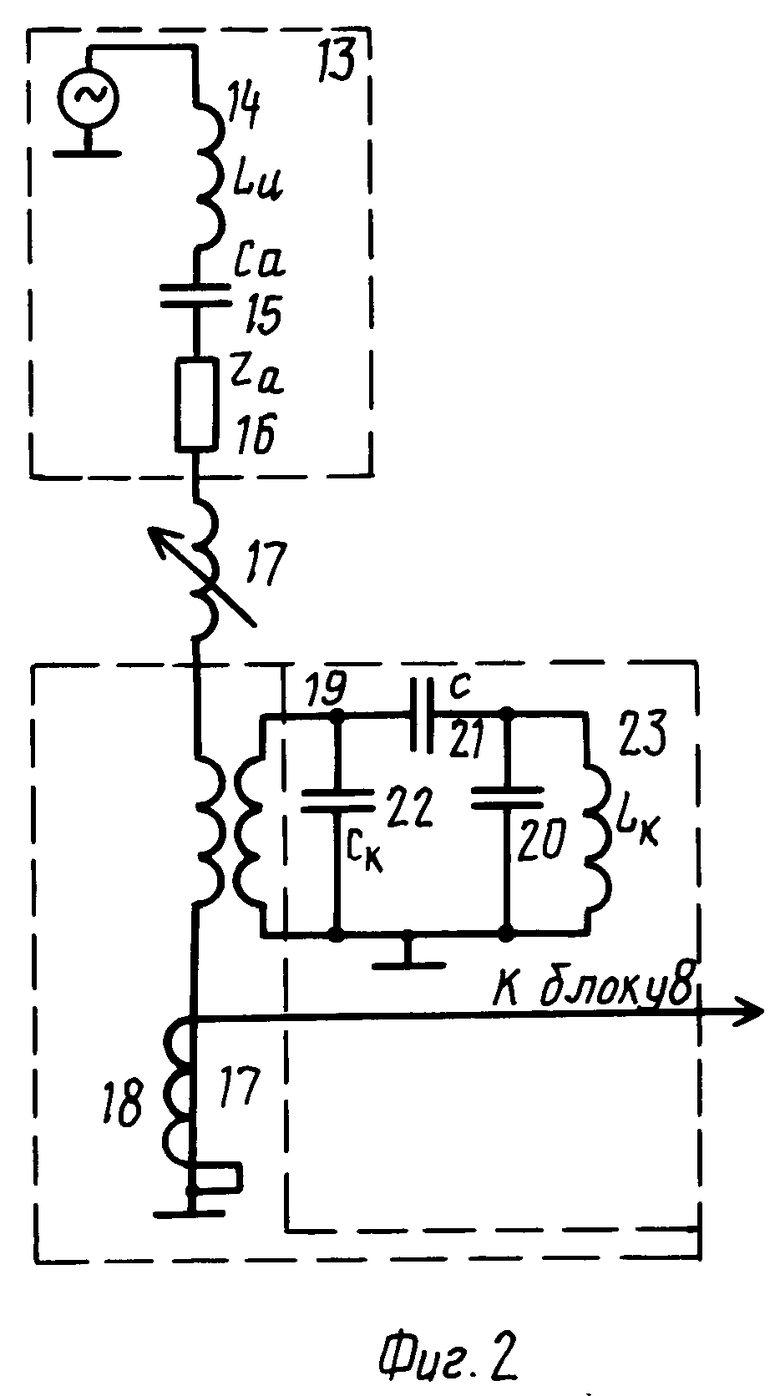
Устройство (фиг. 1) содержит приемо-передающую антенну 1, передатчик 2 с управляемым генератором 3, синхронизатор 4, приемо-измеритель 5, коммутатор 6, блок 7 дифференцирования, аттенюатор 8, повышающий трансформатор 9, фазовращатель 10, ограничитель 11, полосовой фильтр 12. Канал приема дальнего сигнала содержит антенну 13, индуктивность 14, емкость 15, активное сопротивление 16, индуктивность 17 настройки антенны, первичную обмотку 18 трансформатора, вторичную обмотку 19, емкости 20, 21, 22, индуктивность 23.
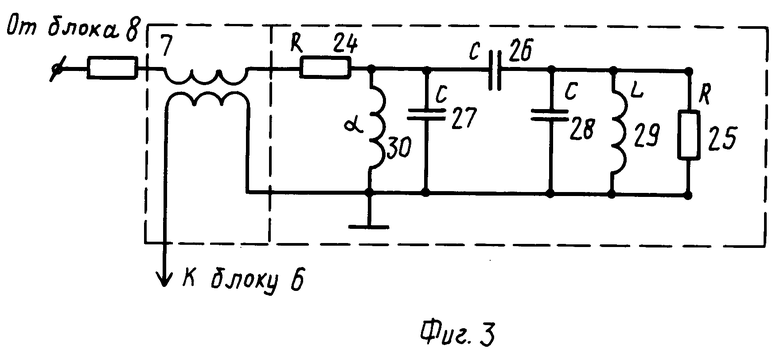
Полосовой фильтр (фиг. 3) содержит резисторы 24, 25, емкости 26, 27, 28, индуктивности 29,30.
Устройство работает следующим образом.
При приеме сигналов дальней станции наводимая в антенне 1 ЭДС вызывает во вторичной обмотке 19 трансформатора тока в передатчике 2 напряжение, которое ослабляется в аттенюаторе 8 и далее через повышающий трансформатор 9, фазовращатель 10 и ограничитель 11 поступает на вход коммутатора 6. Коэффициент трансформации повышающего трансформатора 9 выбран равным коэффициенту аттенюации аттенюатора 8, в связи с чем напряжение дальнего сигнала полностью передается на вход коммутатора 6 и тем самым сохраняется высокое отношение сигнал/шум. При этом на индуктивном сопротивлении вторичной обмотки трансформатора 9 и ограничителя 11 происходит резкое уменьшение амплитуды ближнего сигнала.
Последовательно включенные элементы 13,17,18,19 образуют двухполюсник, причем во вторичную обмотку 19 трансформатора включены резисторы 20,21,22 и индуктивность 23, образующие вместе с элементами 17 и 13 формирующую радиосигнал цепь передатчика.
Если на приемо-передающую антенну 1 воздействует радиосигнал с огибающей (фиг. 4а), на выходе датчика тока появится радиосигнал (фиг. 4в), который в силу полосовых свойств канала приема дальнего сигнала получает запаздывание на величину Δ t (фиг. 4). Известно, что измерение временных интервалов в импульсно-фазовых радионавигационных систем производится по участку принимаемых сигналов, не пораженному нестабильным по амплитуде и фазе отраженным от ионосферы сигналом. На фиг. 4г отраженный от ионосферы сигнал запаздывает относительно прямого (поверхностного) сигнала (фиг. 4а) на время to. Таким образом, для измерений используют только часть сигнала (фиг. 4в) приходящего на приемо-измеритель 5, ограниченную во времени до точки to.
Из энергетических соображений (максимум отношения сигнал/шум) измерение фазы сигнала производится на ближайшему к точке to переходу фазы через нулевой уровень. Необходимо найти такой корректирующий фильтр и место его включения, который был бы максимально прост в исполнении, не имел высокодобротных пиков АЧХ и соответствовал идеальному фильтру в точке to. То есть огибающая (фиг. 4б) на выходе искомого фильтра практически имела бы такое же запаздывание Δ t по отношению к входному сигналу (фиг. 4а), как и огибающая (фиг. 4в).
Для этого полосовой фильтр 12 выполнен в виде двухполюсника из пары связанных контуров со связью более критической (фиг. 3), который включается между вторым выходом блока 7 дифференцирования и шиной заземления.
Выбором шунтирующих резисторов 24, 25, а также емкости 26 связи можно получить такую АЧХ полосового фильтра 12, при которой ширина полосы пропускания Δ F, пиков АЧХ, частоты их настройки f1 и f2 и глубина провала на частоте несущей fo обеспечивает необходимое запаздывание Δ t огибающей (фиг. 4б) в точке to. При этом совпадение радиосигналов с точностью до фазы в каналах дальнего и ближнего сигналов обеспечивается фазовращателем 10.
Таким образом, при приеме ближнего сигнала в момент излучения антенной 1 сигнала своего передатчика 2, вызываемое протекающим в антенне током напряжение на вторичной обмотке 19 трансформатора, через аттенюатор 8, блок 7 дифференцирования с подключенным к нему полосовым фильтром 12 и управляемое синхронизатором 4, поступает на приемоизмеритель 5 для измерения радионавигационного параметра.

Сущность изобретения: устройство содержит 1 приемопередающую антенну (1), 1 передатчик (2), 1 управляемый генератор (3), 1 синхронизатор (4), 1 приемоизмеритель (5), 1 коммутатор (6), 1 блок дифференцирования (7), 1 аттенюатор (8), 1 повышающий трансформатор (9), 1 фазовращатель (10), 1 ограничитель (11), 1 полосовой фильтр (12). 1 - 2 - 8 - 9 - 10 - 11 - 6 - 5 - 4 - 2 - 1; 8 - 7 - 12; 4 - 5; 7 - 6; 4 - 6. 4 ил.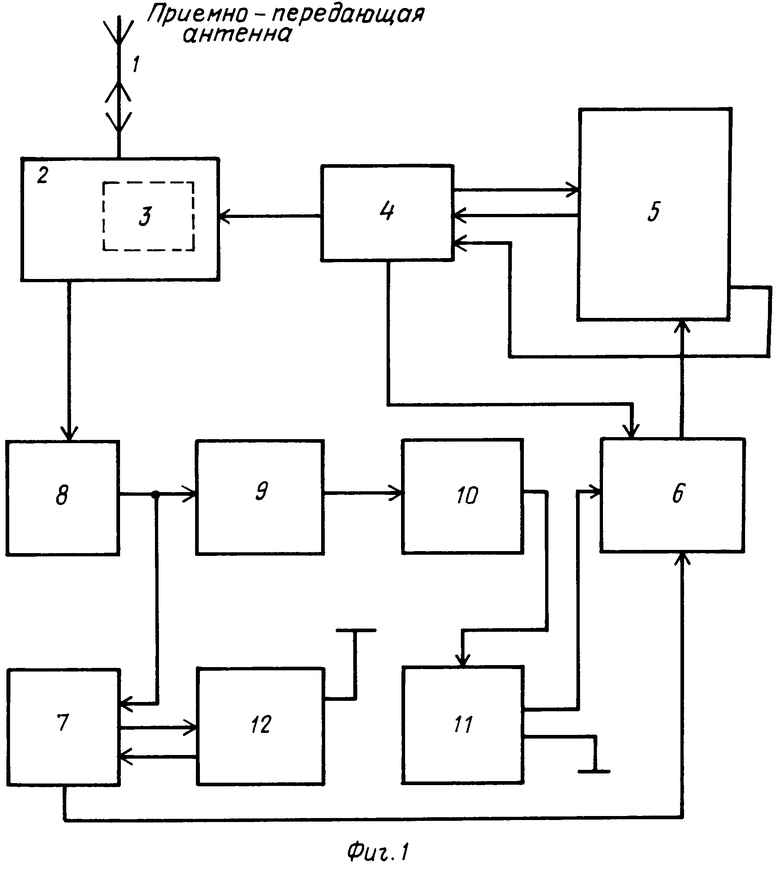
УСТРОЙСТВО КОНТРОЛЯ СИНХРОНИЗАЦИИ МОМЕНТОВ ИЗЛУЧЕНИЯ СИГНАЛОВ ОПОРНЫХ СТАНЦИЙ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ, содержащее последовательно соединенные коммутатор, приемоизмеритель, синхронизатор, передатчик и приемопередающую антенну, второй выход приемоизмерителя подключен к второму входу синхронизатора, второй и третий выходы которого соединены соответственно с вторым входом приемоизмерителя и первым входом коммутатора, аттенюатор, вход которого подключен к выходу передатчика, и последовательно соединенные полосовой фильтр и блок дифференцирования, отличающееся тем, что, с целью повышения точности контроля при воздействии дестабилизирующих факторов, в него введены последовательно соединенные повышающий трансформатор, фазовращатель и ограничитель, выход которого подключен к второму входу коммутатора, третий вход которого соединен с первым выходом блока дифференцирования, второй выход которого подключен к входу полосового фильтра, выполненного в виде связанных контуров со связью больше критической, а выход аттенюатора подключен к входу повышающего трансформатора и второму входу блока дифференцирования.
