Изобретение относится к радионавигации и может быть использовано в приемных трактах наземных станций импульсно-фазовых радионавигационных систем стационарного базирования типа Лоран-С, а также в приемных трактах стационарных наземных контрольных пунктов импульсно-фазовых радионавигационных систем.
Наземные станции импульсно-фазовой радионавигационной системы (ведущая и ведомые) излучают в строго определенные моменты времени и в заданной последовательности сигналы, которые используются потребителями для определения своего местоположения. Для импульсно-фазовой радионавигационной системы Лоран-С эти сигналы представляют собой радиоимпульсы колоколообразной формы с несущей частотой fо = 100 кГц. Излучение сигналов ведомыми станциями осуществляется исходя из временной диаграммы приема сигналов ведущей станции. При этом на каждой из ведомых станций принимают сигнал ведущей станции, определяют (измеряют) его временное положение, затем через определенный промежуток времени, который определяет разнесение излучений, излучают "свой" сигнал. Точность временного излучения при этом зависит от точности измерения временного положения принимаемого сигнала ведущей станции, которая зависит от помех, принимаемых вместе с полезным сигналом. Полезным сигналом импульсно-фазовой радионавигационной системы являетя сигнал, распространяющийся вдоль поверхности Земли, а помехой - сигнал этой же системы, отраженный от ионосферы, который при приеме накладывается на полезный поверхностный сигнал и искажает его. Помехами могут являться также сигналы других радиотехнических средств, работающих в том же диапазоне частот, что и импульсно-фазовая радионавигационная система.
Известен способ подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы, основанный на частотном разделении сигнала и помехи, включающий прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи от другого радиотехнического средства, и частотную режекцию пораженных помехой участков спектра сигнала с помощью режекторных фильтров.
При подавлении помехи таким способом происходит искажение полезного сигнала из-за вырезания части его спектра, при этом чем шире полоса частот у помехи, тем шире полоса режекции у режекторного фильтра и тем больше искажения у сигнала.
Известен способ подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы, включающий прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи от другого радиотехнического средства, формирование из принятого суммарного сигнала компенсирующего колебания и вычитание компенсирующего колебания из принятого суммарного сигнала. Способ реализуется в известных устройствах, относящихся к устройствам приема сигналов импульсно-фазовой радионавигационной системы типа Лоран-С.
Способ подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы, принятый в качестве прототипа, включает прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи, формирование компенсирующего колебания и вычитание компенсирующего колебания из принятого суммарного сигнала, при этом формирование компенсирующего колебания осуществляется с помощью генератора синусоидальных колебаний, частота, фаза и амплитуда которого подстраиваются с помощью соответствующих цепей автоподстройки под частоту, фазу и амплитуду помехи, присутствующей в суммарном сигнале.
Недостатком способа-прототипа является то, что при подавлении помехи происходит искажение полезного сигнала, при этом чем шире полоса частот формируемого компенсирующего колебания, тем искажения выше. Это обусловлено в основном влиянием полезного сигнала на формирование компенсирующего колебания, в результате чего часть полезного сигнала проникает в формируемое компенсирующее колебание. Это не дает возможности решить задачу подавления широкополосной помехи в виде отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы.
Целью изобретения является уменьшение искажений полезного сигнала.
Сущность изобретения состоит в том, что по способу подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы, включающему прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи, формирование компенсирующего колебания, а также вычитание компенсирующего колебания из принятого суммарного сигнала, формирование компенсирующего колебания осуществляют путем приема и усиления ортогональной составляющей отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы.
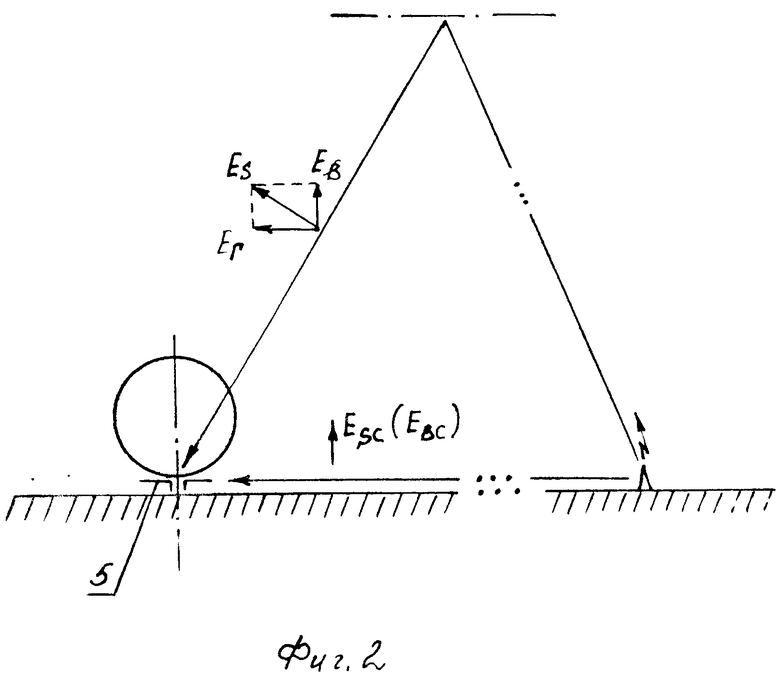
На фиг. 1 представлена структурная схема устройства, реализующего предложенный способ; на фиг.2 - схема ориентирования диаграммы направленности антенны, осуществляющей прием ортогональной составляющей отраженного от ионосферы сигнала.
Способ заключается в следующем. Принимают суммарный сигнал, состоящий из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи в виде отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы, путем приема вертикальной составляющей напряженности электрического поля. Принимают также ортогональную составляющую отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы путем приема ортогональной (горизонтальной) составляющей напряженности электрического поля. Усиливают принятую ортогональную составляющую отраженного от ионосферы сигнала до получения уровня, совпадающего с уровнем составляющей отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы, присутствующей в принятом суммарном сигнале, формируя тем самым компенсирующее колебание. При этом в сформированном компенсирующем сигнале не содержится никаких частей полезного (поверхностного) сигнала импульсно-фазовой радионавигационной системы, имеющего только вертикальную составляющую напряженности электрического поля. Вычитают сформированное таким образом компенсирующее колебание из принятого суммарного сигнала, осуществляя тем самым подавление помехи - отраженного от ионосферы меающего сигнала импульсно-фазовой радионавигационной системы, принимаемого одновременно с полезным (поверхностным) сигналом.
В результате осуществления этих операций обеспечивается подавление отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы, перекрывающего полезный (поверхностный) сигнал в частотной и временной областях, при этом полезный сигнал не искажается, поскольку в компенсирующем сигнале, сформированном указанным образом, не содержится никаких частей полезного сигнала.
Устройство, реализующее предложенный способ, содержит последовательно соединенные ненаправленную штыревую антену 1, усилитель 2, первый полосовой фильтр 3, согласованый по полосе со спектром сигнала импульсно-фазовой радионавигационной системы, и блок 4 вычитания, а также последовательно соединенные направленную антенну 5, выполненную в виде горизонтального вибратора, ось которого совпадает с направлением на передающую станцию системы, согласующий усилитель 6, второй полосовой фильтр 7 и аттенюатор 8, выход которого подключен к компенсационному входу блока 4 вычитания.
Ненаправленная антенна 1 представляет собой штырь, расположенный перпендикулярно земной поверхности (вертикальный штырь), а направленная антенна 5 представляет собой вибратор, расположенный параллельно земной поверхности (горизонтальный вибратор).
Устройство работает следующим образом.
Антенна 1 (вертикальный штырь) принимает сигналы, имеющие вертикальную составляющу напряженности электрического поля, а именно полезные (поверхностные) сигналы, излученные наземной передающей станцией импульсно-фазовой радионавигационной системы стационарного базирования типа Лоран-С (с напряженностью электрического поля Еsc, которая имеет только вертикальную составляющую Евс = Еsс, фиг.2), а также оотраженные от ионосферы мешающие сигналы импульсно-фазовой радионавигационной системы (вертикальная составляющая Ев напряженности электрического поля Еs которых, фиг.2, принимается штырем 1 в качестве помехи). С выхода приемной антенны 1 поверхностные сигналы импульсно-фазовой радионавигационной системы в сумме с отраженными от ионосферы мешающими сигналами поступают через усилитель 2 на вход полосового фильтра 3.
Усилитель 2 обеспечивает требуемую чувствительность устройства, а фильтр 3 обеспечивает частотную селекцию сигналов импульсно-фазовой радионавигационной системы от внеполосных помех. С выхода фильтра 3 принятые поверхностные сигналы импульсно-фазовой радионавигационной системы и помеха в виде отраженных от ионосферы мешающих сигналов импульсно-фазовой радионавигационной системы поступают на сигнальный вход блока 4 вычитания, где помеха компенсируется. Компенсация помехи осуществляется с помощью компенсирующего колебания, поступающего на компенсационный вход блока 4 вычитания с выхода аттенюатора 8.
Формирование компенсирующего колебания осуществляется следующим образом. С помощью направленной антенны 5, ноль диаграммы направленности которой располагается (фиг.2) в горизонтальной плоскости, т.е. в плоскости распространения поверхностных сигналов импульсно-фазовой радионавигационной системы, принимается и преобразуется в напряжение переменного тока горизонтальная составляющая Ег напряженности электрического поля Еs, создаваемого отраженным от ионосферы сигналом импульсно-фазовой радионавигационной системы. Поверхностные сигналы, имеющие только вертикальную составляющую напряженности электрического поля Евс = Еsс, принимаемые штыревой антенной 1, антенной 5 не принимаются. Таким образом, антенна 5 не принимает полезные (поверхностные) сигналы, а принимает только ортогональную (горизонтальную) составляющую отраженных от ионосферы мешающих сигналов импульсно-фазовой радионавигационной системы.
С выхода антенны 5 принятая горизонтальная составляющая отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы поступает на вход согласующего усилителя 6. Усилитель 6 путем соответствующего усиления составляющей Ег обеспечивает согласование по амплитуде принятых антеннами 5 и 1 составляющих Ег и Ев отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы соответственно на входах фильтров 7 и 3. С выхода усилителя 6 усиленная составляющая Ег отраженного от ионосферы сигнала поступает на вход полосового фильтра 7. Полосовой фильтр 7 выполнен идентично фильтру 3 и имеет такую же амплитудно-частотную характеристику, что обеспечивает ту же форму сигнала импульсно-фазовой системы на его выходе, что и на выходе фильтра 3. С выхода полосового фильтра 7 составляющая Ег отраженного от ионосферы сигнала поступает на вход аттенюатора 8, на выходе которого формируется компенсирующее клебание. Аттенюатор предназначен для выравнивания по амплитуде составляющих Ег и Ев отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы, поступающих соответственно на компенсационный и сигнальный входы блока 4 вычитания, т.е. для выравнивания по амплитуде компенсирующего колебания и помехи.
Таким образом, компенсирующее колебание, сформированное из самой помехи (отраженного от ионосферы сигнала импульсно-фазовой радионавигационной системы), совпадает с ней по времени, форме огибающей и фазе высокочастотного заполнения.
В результате вычитания компенсирующего колебания, поступающего с выхода аттенюатора 8 на компенсационный вход блока 4 вычитания, из сумарного сигнала, поступающего с выхода фильтра 3 на сигнальный вход блока 4, осуществляется подавление помехи - отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы, принимаемого одновременно с полезным (поверхностным) сигналом. При этом полезный сигнал не искажается, поскольку в компенсирующем сигнале не содержится никаких частей полезного сигнала.
Таким образом, предложенный способ подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы обеспечивает возможность подавления отраженных от ионосферы мешающих сигналов импульсно-фазовой радионавигационной системы при приеме поверхностных сигналов без скажения последних.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНОЕ УСТРОЙСТВО СИГНАЛА РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2030758C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014629C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014630C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
| УСТРОЙСТВО КОНТРОЛЯ СИНХРОНИЗАЦИИ МОМЕНТОВ ИЗЛУЧЕНИЯ СИГНАЛОВ ОПОРНЫХ СТАНЦИЙ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2012898C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАДЕРЖКИ РАДИОИМПУЛЬСА ОТНОСИТЕЛЬНО МЕСТНОГО ОПОРНОГО СИГНАЛА | 1991 |
|
RU2012026C1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ ПО РАДИОКАНАЛАМ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2079855C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2014628C1 |

Изобретение относится к радионавигации. Способ подавления помехи при приеме сигналов импульсно-фазовой радионавигационной системы включает прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи, формирование компенсирующего колебания и его вычитание из принятого суммарного сигнала, при этом формирование компенсирующего колебания производят путем приема и усиления ортогональной составляющей отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы. 2 ил.
СПОСОБ ПОДАВЛЕНИЯ ПОМЕХИ ПРИ ПРИЕМЕ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ, включающий прием суммарного сигнала, состоящего из поверхностного сигнала импульсно-фазовой радионавигационной системы и помехи, формирование компенсирующего колебания и вычитание компенсирующего колебания из принятого суммарного сигнала, отличающийся тем, что, с целью уменьшения искажений полезного сигнала, формирование компенсирующего колебания осуществляют путем приема и усиления ортогональной составляющей отраженного от ионосферы мешающего сигнала импульсно-фазовой радионавигационной системы.
| Патент США N 3916320, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
