Изобретение относится к радионавигации и может быть использовано в приемных трактах наземных станций импульсно-фазовых радионавигационных систем (ИФРНС) стационарного базирования типа Лоран-С, а также в приемных трактах стационарных наземных контрольных пунктов ИФРНС.
Известно, что определение местоположения объекта с помощью сигналов радионавигационной системы сводится к нахождению разности времен между принимаемыми на объекте сигналами ведущей и ведомых станций системы, излученных этими станциями в строго определенные моменты времен и в заданной последовательности. Для ИФРНС Лоран-С эти сигналы представляют собой радиоимпульсы колоколообразной формы с несущей частотой fo = 100 кГц.
Для точного временного излучения сигналов на ведомой станции импульсно-фазовой радионавигационной системы принимают сигнал ведущей станции, определяют (измеряют) его временное положение, например, по отношению к сигналам точного времени, а затем через определенный промежуток времени, который определяет "разнесение" излучений, излучают "свой" сигнал. Очевидно, что точность временного излучения сигнала ведомой станции зависит от точности измерения временного положения принимаемого сигнала ведущей станции.
Точные измерения временного положения принимаемого на ведомой станции сигнала ведущей станции ИФРНС осуществляют при использовании в измерениях поверхностных (т. е. распространяющихся вдоль поверхности Земли) сигналов передающей станции ИФРСН. Объясняется это тем, что для поверхностных сигналов ИФРНС изменения формы огибающей и изменения высокочастотного заполнения, происходящие при распространении и влияющие на точность измерений, можно предсказать и ввести соответствующие поправки. (Ниже эти сигналы будут называться полезными сигналами передающей станции ИФРНС). Точность указанных выше измерений, а значит и точность излучений сигналов ведомой станцией ИФРНС, зависит от помех, принимаемых на ведомой станции ИФРНС в сумме с полезными (поверхностными) сигналами передающей (ведущей) станции ИФРНС. Точность временного излучения сигнала ведомой станции ИФРНС по отношению к сигналу ведущей станции (т. е. точность синхронизации) контролируется на стационарном контрольном пункте ИФРНС путем измерения соответствующего временного интервала между принимаемыми на нем сигналами. При этом осуществляется также и визуальный контроль формы принимаемых на контрольном пункте сигналов. Если контрольный пункт обнаружит, что синхронизация станции вышли за установленные пределы или сигналы станции искажены по форме, то по каналу радиосвязи на эту станцию передается сообщение о нарушении норм излучения.
Контроль за синхронизацией и за формой излучаемых станцией ИФРНС сигналов зависит от помех, принимаемых на контрольном пункте ИФРНС в сумме с полезными (поверхностными) сигналами станции ИФРНС.
Вследствие загруженности частотного диапазона, используемого ИФРНС. прием поверхностных (полезных) сигналов передающей станции ИФРНС сопровождается, как правило, помехами со стороны других радиотехнических систем, например систем передач изобар, систем передачи синхронизирующих сигналов, системы ДЕККА и др. По отношению к полезным радиоимпульсным сигналам станции ИФРНС сигналы посторонних служб представляют, как правило, узкополосные колебания.
Для подавления узкополосных помех в устройствах для приема сигналов передающей станции ИФРНС используются полосовые и режекторные фильтры. Первые используются для подавления внеполосных помех, вторые - для подавления внутриполосных помех.
Например, известно устройство для приема сигналов станции ИФРНСС Лоран-С, содержащее эллиптический полосовой фильтр с нулями передачи на известных несущих частотах системы ДЕККА (73 и 129 кГц) и центральной частотой, совпадающей с несущей частотой радиоимпульсного сигнала ИФРНС Лоран-С (fo = 100 кГц). Такой полосовой фильтр обеспечивает формирование амплитудно-частотной характеристики устройства равномерной в пределах полосы пропускания с крутыми скатами вне полосы пропускания и с режекцией на известных частотах внеполосных помех (частотах системы ДЕКАА).
Известно также аналогичное устройство, предназначенное для приема сигналов ИФРНС Лоран-С и подавления внеполосных помех.
Для подавления узкополлосных внутриполосных помех в устройствах для приема сигналов станции ИФРНС применяются режекторные фильтры, обычно устанавливаемые после входного полосового фильтра, при этом для подавления нескольких узкополосных помех, подающих в полосу пропускания входного полосового фильтра, устанавливают последовательно несколько (по числу подавляемых помех) режекторных фильтров, каждый из которых подавляет помеху на "своей" частоте. Для этих же целей с успехом могут использоваться блоки из последовательно включенных самонастраивающихся режекторных фильтров. В ряде случаев помимо узкополосных помех прием поверхностных сигналов передающей станции ИФРНС сопровождается помехами, совпадающими по спектру с полезными сигналами. Такими помехами для поверхностных сигналов передающей станции ("пространственные помехи"), которые могут накладываться на поверхностные (полезные) сигналы передающей станции ИФРНС и искажать их. При неблагоприятных условиях приема, когда запаздывание отраженного (мешающего) сигнала по отношению к поверхностному мало (30-40 мкс), в точке приема из-за интерференции пространственных и поверхностных радиоимпульсов создается результирующий радиоимпульс, огибающая и высокочастотное заполнение которого искажения за исключением передней части, снабженной от влияния пространственных волн. Наличие таких помех затрудняет контроль формы принимаемых с помощью рассмотренных устройств сигналов ИФРНС, например при использовании их на контрольном пункте ИФРНС, а также вынуждает использовать для измерения временного положения принятого радиоимпульса его начальный участок, неискаженный отраженным от ионосферы сигналом, где однако уровень сигнала мал, что затрудняет контроль за точностью синхронизации.
Низкая помехозащищенность по отношению к отраженным от ионосферы мешающим сигналам передающей станции ИФРНС при приеме поверхностных сигналов передающей станции ИФРНС является недостатком рассмотренных устройств-аналогов.
За прототип принято устройство для приема сигналов станции импульсно-фазовой радионавигационной системы. Структурная схема устройства-прототипа приведена на фиг.3.
Устройство, принятое за прототип, содержит (см.фиг.3= последовательно соединенные приемную (штыревую) антенну 1, усилитель 2 блок 3 фильтрации, содержащий последовательно соединенные полосовой фильтр 4 и блок 5 подавления узкополосных помех, и блок 6 формирования совпадающих во времени с принимаемыми сигналами стробов. Выход блока 3 фильтрации является сигнальным выходом устройства, а выход блока 6 формирования совпадающих по времени с принимаемыми сигналами стробов является опорным выходом устройства.
Устройство, принятое за прототип, работает следующим образом. С выхода приемной антенны 1 поверхностные (полезные) сигналы ИФРНС, излучаемые наземной передающей станцией системы (радиоимпульсы ИФРНС Лоран-С с несущей частотой fo = 100 кГц) в сумме с узкополосными помехами и отраженными от ионосферы (мешающими) сигнала этой же станции, спектр которых совпадает со спектром поверхностных сигналов, поступают через усилитель 2 на вход блока 3 фильтрации, а в нем - на вход полосового фильтра 4. Полосовой фильтр 4 осуществляет подавление внеполосных помех. С выхода полосового фильтра 4 сигналы в сумме с узкополосными помехами, попадающими в полосу пропускания фильтра 4, и отраженными от ионосферы мешающими сигналами ИФРНС, поступают на вход блока 5 подавления узкополосных помех. Блок 5 содержит N последовательно включенных режекторных фильтров (по числу n подавляемых помех), настроенных на частоты подавляемых помех. Блок 5 осуществляет подавление узкополосных помех, попадающих в полосу пропускания фильтра 4. С выхода блока 5 отфильтрованные от узкополосных помех поверхностные сигналы станции ИФРНС и отраженные от ионосферы мешающие сигналы (пространственные помехи= поступают на выход блока 3 фильтрации. С выхода блока 3 фильтрации принятые поверхностные сигналы в сумме с отраженными от ионосферы мешающими сигналами поступают на сигнальный выход устройства для идеальной обработки. Контроль за формой принимаемых устройством сигналов может при необходимости, например, в случае использования устройства на контрольном пункте ИФРНС осуществляться визуально, например с помощью электронно-лучевой трубки осциллографа, подключаемого к выходу блока 3 (на фиг.3 не показан).
Выходные сигналы блока 3 фильтрации поступают также на вход блока 6 формирования совпадающих по времени с принимаемыми сигналами стробов. В блоке 6 осуществляется формирование стробов (видеоимпульсов с заданной амплитудой и длительностью), временное положение которых совпадает с принимаемыми сигналами передающей станции ИФРНС. Выходные стробы формируются в блоке 6 из импульсов высокостабильного опорного генератора, при этом частота следования опорных импульсов преобразуется в частоту, совпадающую с частотой следования радиоимпульсов, излучаемых станцией ИФРНС, затем формируемые стробы сдвигаются (задерживаются) на величину, при которой достигается совпадение временного положения стробов с отсчетной точкой принятых радиоимпульсных сигналов ИФРНС. В качестве отсчетной точки сигнала, как правило, выбирается точка перехода через нуль напряжения высокочастотного заполнения радиоимпульсов на его начальном участке, который остается ненасаженным в условиях воздействия отраженных от ионосферы мешающих сигналов. С выхода блока 6 сформированные стробы, совпадающие по времени с принимаемыми сигналами, поступают на опорный выход устройства. Эти стробы предназначены для идентификации принятых устройством радиосигналов станции ИФРНС, поступающих потребителю с сигнального выхода, для синхронизации осциллографа при контроле формы сигналов, а также используются при измерениях временного положения принятых сигналов.
Недостатком устройства-прототипа является то, что в нем при приеме поверхностных сигналов передающей станции ИФРНС не подавляются отраженные от ионосферы сигналы этой же станции, т.е. устройство-прототип обладает низкой помехозащищеностью по отношению к отраженным от ионосферы (мешающим) сигналам передающей станции ИФРНС при приеме поверхностных (полезных) сигналов этой же станции. В результате, при неблагоприятных условиях приема, когда запаздывание отраженных от ионосферы радиоимпульсов мало, например (30-40) мкс, значительная часть поверхностных (полезных) сигналов поражается пространственными радиоимпульсами. Это затрудняет контроль формы принимаемых полезных сигналов ИФРНС, например, при использовании устройства-прототипа на контрольном пункте ИФРНС, а также вынуждает использовать для измерений начальный участок радиоимпульса, неискаженный отраженным от ионосферы сигналом, где уровень сигнала мал.
Целью изобретения является повышение помехозащищенности по отношению к отраженным от ионосферы сигналам передающей станции радионавигационной системы при приеме поверхностных сигналов этой станции.
Указанная цель достигается тем, что в устройство для приема сигналов станции импульсно-фазовой радионавигационной системы, содержащее последовательно соединенные приемную антенну, усилитель, блок фильтрации и блок формирования совпадающих по времени с принимаемыми сигналами стробов, выход которого является опорным выходом устройства, введены соединенные последовательно дополнительная антенна, согласующий усилитель, дополнительный блок фильтрации, регулируемый усилитель, первый синхронный детектор, первый блок вычитания и интегратор, выход которого подключен к управляющему входу регулируемого усилителя, а также второй синхронный детектор, выход которого подключен к второму входу первого блока вычитания, а первый вход подключен к выходу основного блока фильтрации, второй блок вычитания, выход которого является сигнальным выходом устройства, а первый и второй входы подключены соответственно к выходу основного блока фильтрации и к выходу регулируемого усилителя, формирователь импульсов и управляемый генератор, входы которых подключены к выходу блока формирования совпадающих по времени с принимаемыми сигналами стробов, и ключ, выход которого соединен с вторыми входами первого и второго синхронных детекторов, а управляющий и сигнальный входы соединены соответственно с выходом формирователя импульсов и выходом управляемого генератора, при этом дополнительная антенна выполнена в виде горизонтального вибратора, ось которого совпадает с направлением на передающую станцию импульсно-фазовой радионавигационной системы.
Отмеченная совокупность существенных признаков не обнаружена в научно-технической и патентной литературе, что позволяет сделать вывод о том, что предложенное техническое решение обладает новизной и соответствует критерию "существенные отличия".
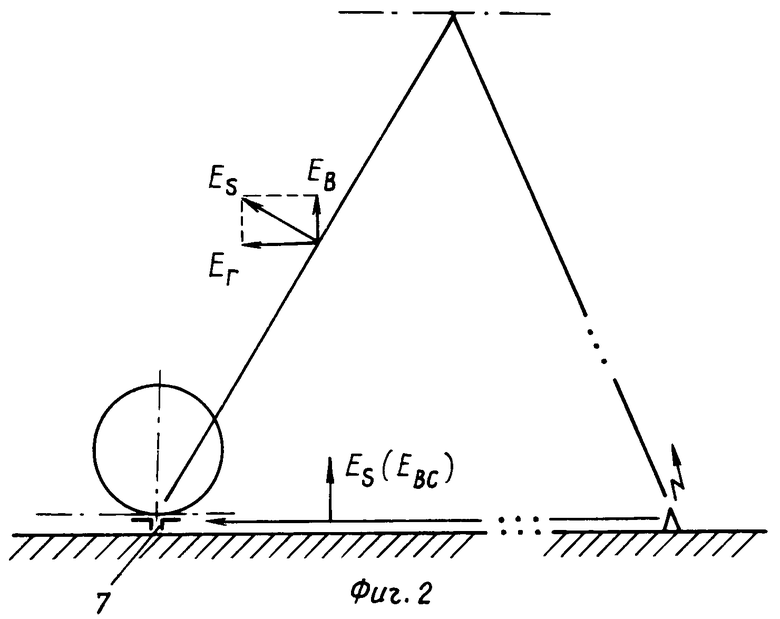
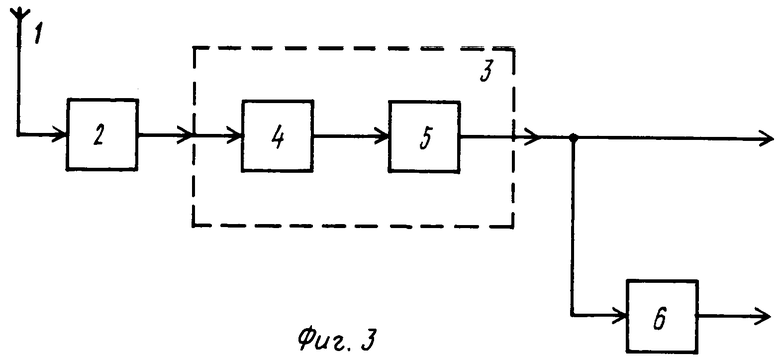
На фиг. 1 представлена структурная схема предложенного устройства; на фиг. 2 - схема ориентирования диаграммы направленности дополнительной антенны по отношению к плоскости распространения поверхностных сигналов передающей станции ИФРНС; на фиг.3 - структурная схема устройства-прототипа.
Предлагаемое устройство (см.фиг.1), содержит последовательно соединенные основную (штыревую) приемную антенну 1, усилитель 2, блок 3 фильтрации, содержащий последовательно соединенные полосовой фильтр 4 и блок 5 подавления узкополосных помех, и блок 6 формирования совпадающих по времени с принимаемыми сигналами стробов, выход которого является опорным выходом устройства. Устройство также содержит соединенные последовательно дополнительную антенну 7, согласующий усилитель 8, дополнительный блок 9 фильтрации, содержащий последовательно соединенные полосовой фильтр 10 и блок 11 подавления узкополосных помех, регулируемый усилитель 12, первый синхронный детектор 13, первый блок 14 вычитания и интегратор 15, выход которого подключен к управляющему входу регулируемого усилителя 12. Устройство также содержит второй синхронный детектор 16, выход которого подключен к второму входу первого блока 14 вычитания, а первый вход подключен к выходу блока 3 фильтрации, второй блок 17 вычитания, выход которого является сигнальным выходом устройства, а первый и второй входы подключены соответственно к выходу блока 3 фильтрации и выходу регулируемого усилителя 12, формирователь 18 импульсов и управляемый генератор 19, входы которых подключены к выходу блока 6 формирования совпадающих по времени с принимаемыми сигналами стробов, и ключ 20, выход которого соединен с вторыми входами синхронных детекторов 13 и 16, а управляющий и сигнальный входы соединены соответственно с выходом формирователя 18 импульсов и выходом управляемого генератора 19.
Конструктивно дополнительная антенна 7 выполнена в виде приподнятого над поверхностью Земли горизонтального вибратора (т.е. вибратора, расположенного параллельно земной поверхности), ось которого совпадает с направлением на передающую станцию импульсно-фазовой радионавигационной системы. Нуль диаграммы направленности дополнительной антенны 7 располагается в горизонтальной плоскости, т.е. в плоскости распространения поверхностных сигналов передающей станции импульсно-фазовой радионавигационной системы.
Габариты антенны 1, 7 соизмеримы. Например, при высоте антенны 1, равной 4 м (что имеет место на практике при приеме сигналов ИФРНС типа Лоран-С), габариты антенны 7 составляют порядка 8 и (два плеча по 4 м каждое), при этом антенна 7 приподнята над поверхностью Земли на высоту 0,7-1,5 м.
Полосовые фильтры 4, блоков 3, 9 фильтрации могут быть выполнены по известной схеме эллиптического полосового фильтра шестого порядка на операционных усилителях.
Блоки 5, 11 подавления узкополосных помех блоков 3, 9 фильтрации могут быть выполнены на основе N последовательно выключенных самонастраивающихся режекторных фильтров.
Блок 6 формирования совпадающих по времени с принимаемыми сигналами стробов может быть выполнен по известной схеме.
Регулируемый усилитель 12 может быть выполнен на основе операционного усилителя с плавно изменяющимся от "минус Ку" до "плюс Ку" коэффициентом передачи, при этом в качестве перестраиваемого резистора в цепи управления коэффициентом передачи может быть использован управляемый напряжением полевой транзистор.При необходимости формирования однополярного выходного сигнала интегратора (например, в случае использования его для управления полевым транзистором в схеме блока 12) применяются, например, либо однополярное его питание, либо установка на выходе интегратора диода,
Формирователь 18 импульсов может быть выполнен на основе одновибратора.
Реализация ключа 20 обеспечивается, например, с помощью микросхемы 564КП1, 561КТ3.
Управляемый генератор 19 может быть выполнен, например, по схеме, содержащей последовательно соединенные опорный генератор с частотой, равной частоте высокочастотного заполнения радиоимпульса ИФРНС fo = 100 кГц, фазовращатель, выход которого является выходом устройства, фазовый детектор и интегрирующий исполнительный элемент, выход которого подключен к управляющему входу фазовращателя, при этом второй вход фазового детектора является входом для подключения синхронизирующего сигнала, Поскольку в схеме генератора используется интегрирующий исполнительный элемент, сохраняющий свое выходное состояние после снятия входного сигнала, то это позволяет использовать для синхронизации генератора импульсы, частота которых меньше частоты выходного сигнала генератора. При этом при отсутствии импульсов синхронизации, когда на выходе фазового детектора сигнал равен нулю, интегрирующий исполнительный элемент сохраняет свое установленное ранее (при воздействии импульса синхронизации) значение, поддерживая тем самым установленное при синхронизации значения фазового сдвига. Другой особенностью управляемого генератора с фазовым детектором в цепи управления является то, что в нем обеспечивается синхронизация с точностью до 90о. Рассмотренная структура управляемого генератора, обеспечивающая выполнение увязанных функций, является общеизвестной.
Предлагаемое устройство работает следующим образом
Приемная антенна 1 (вертикальный штырь) принимает сигналы, имеющие вертикальную составляющую напряженности электрического поля, а именно полезные (поверхностные) радиоимпульсные сигналы, излученные передающей станцией импульсно-фазовой радионавигационной системы стационарного базирования) радиоимпульсы ИФРНС типа Лоран-С с несущей частотой fj = 100 кГц, имеющие вертикальную составляющую поля ЕВС = ESC, см. фиг.2), узкополосные помехи, создаваемые посторонними радиотехническими средствами, а также отраженные от ионосферы мешающие сигналы этой же передающей станции системы (вертикальная составляющая ЕВ напряженности поля ES которых принимается штырем в качестве пространственной помехи).
С выхода приемной антенны 1 полезные (поверхностные) сигналы станции радионавигационной системы в сумме с узкополосными помехами и отраженными от ионосферы мешающими сигналами, поступают через усилитель 2 на вход полосового фильтра 4 блока 3 фильтрации. Усилитель 2 обеспечивает требуемую чувствительность устройства. Полосовой фильтр 4 блока фильтрации обеспечивает частотную селекцию сигналов ИФРНС от внеполосных помех. Фильтр 4 имеет амплитудно-частотную характеристику, согласованную по полосе пропускания со спектром сигнала ИФРНС.
С выхода полосового фильтра 4 полезные сигналы в сумме с узкополосными помехами, попадающими в полосу пропускания фильтра 4, и отраженными от ионосферы мешающими радиоимпульсами поступают на вход блока 5 подавления узкополосных помех. Блок 5 осуществляет подавление (режекцию) узкополосных помех, попадающих в полосу пропускания фильтра 4, с помощью, например, известных самонастраивающихся режекторных фильтров. С выхода блока 5 подавления узкополосных помех отфильтрованные от внутриполосных узкополосных помех принятые полезные (поверхностные) сигналы и отраженные от ионосферы мешающие сигналы поступают на выход блока 3 фильтрации.
С выхода блока 3 фильтрации эти сигналы поступают на первый (сигнальный) вход блока 17 вычитания, где отраженные от ионосферы мешающие сигналы компенсируются. Компенсация осуществляется с помощью компенсирующих колебаний, поступающих на второй (компенсационный) вход блока 17 с выхода регулируемого усилителя 12.
Формирование компенсирующих колебаний в предложенном устройстве осуществляется следующим образом.
С помощью антенны 7 горизонтального вибратора, ось которого совпадает с направлением на передающую станцию системы, а нуль диаграммы направленности располагается (см.фиг.2) в горизонтальной плоскости, т.е. в плоскости распространения поверхностных сигналов ИФРНС) принимается и преобразуется в напряжение переменного тока ортогональная (горизонтальная) составляющая ЕГ напряженности электрического поля ES, создаваемого отраженным от ионосферы радиоимпульсным сигналом ИФРНС (вертикальная составляющая КВ которого принимается штыревой антенной 1 в качестве пространственной помехи). С помощью антенны 7 принимаются и преобразуются в напряжения переменного тока также соответствующие составляющие узкополосных помех, создаваемых посторонними радиотехническими средствами. Поверхностные полезные сигналы передающей станции ИФРНС, имеющие только вертикальную составляющую напряженности поля ЕВС = ЕSC и принимаемые штыревой антенной 1, антенной 7 не принимаются. Таким образом антенна 7 не принимает полезные сигналы передающей станции радионавигационной системы, а принимает только помехи.
Принимаемые антенной 7 помехи поступают на вход согласующего усилителя 8. Усилитель 8 обеспечивает требуемую чувствительность устройства по приему ортогональной составляющей ЕГ отраженного от ионосферы радиоимпульсного сигнала ИФРНС. С выхода усилителя 8 усиленная составляющая ЕГ отраженного от ионосферы сигнала поступает на вход полосового фильтра 10 дополнительного блока 9 фильтрации, Полосовой фильтр 10 блока 9 фильтрации выполнен идентично фильтру 4 блока 3 фильтрации и имеет идентичную с ним амплитудно-частотную характеристику, что обеспечивает ту же форму отраженного от ионосферы радиоимпульсного сигнала ИФРНС на его выходе, что и на выходе фильтра 4. Полосовой фильтр 10 обеспечивает частотную селекцию принимаемых отраженных от ионосферы сигналов ИФРНС от внеполосных помех. С выхода полосового фильтра 10 принятые антенной 7 отраженные от ионосферы радиоимпульсные сигналы ИФРНС и узкополосные помехи, попадающие в полосу пропускания фильтра 10, поступают на вход блока 11 подавления узкополосных помех, где эти узкополосные помехи подавляются (режектируются), например с помощью известных самонастраивающихся режекторных фильтров аналогично блоку 5 подавления узкополосных помех основного блока 3 фильтрации. С выхода блока 11 подавления узкополосных помех отфильтрованный от внутриполосных узкополосных помех принятый антенной 7 отраженный от ионосферы сигнал (в виде составляющей ЕГ, см. фиг. 2) поступает на выход блока 9 фильтрации. С выхода блока 9 отраженный от ионосферы сигнал (в виде составляющей ЕГ, см.фиг.2) поступает на сигнальный вход регулируемого усилителя 12, на выходе которого формируется компенсирующее колебание, поступающее на второй (компенсационный) вход блока 17 вычитания для подавления (компенсации) принимаемой антенной 1 в качестве пространственной помехи составляющей ЕВ (см.фиг.2) отраженного от ионосферы сигнала. Поскольку ортогональные составляющие ЕВ и ЕГ отраженного от ионосферы сигнала, принимаемые соответственно антеннами 1 и 7, совпадают по форме и фазе их высокочастотного заполнения, но отличаются по амплитуде, то компенсация составляющей ЕВ в блоке 17 осуществляется при выравнивании (подстройке) амплитуды составляющей ЕГ, поступающей на компенсационный вход блока 17, под амплитуду составляющей ЕВ, поступающей на сигнальный вход блока 17,
Указанная подстройка осуществляется с помощью блоков 6, 12-16, 18-20 следующим образом.
Выходные сигналы блока 3 фильтрации поступают на вход блока 6 формирования совпадающими по времени с применяемыми сигналами стробов, который формирует "следящие стробы" (короткие видеоимпульсы), временное положение которых жестко "привязано" к переходу через нуль напряжения высокочастотного заполнения принятого полезного (поверхностного) радиоимпульса ИФРНС на его начальном участке, например, в районе третьего-четвертого периода высокочастотного заполнения, где практически отсутствует искажающее влияние отраженного от ионосферы радиоимпульса. Формируемые блоком 6 формирования совпадающих по времени с принимаемыми сигнала стробов короткие видеоимпульсы (стробы) поступают с частотой следования принимаемых сигналов станции ИФРНС на вход управляемого генератора 19 и на вход формирователя 18 импульсов, С помощью формирователя 18, выполненного на основе одновибратора, осуществляется расширение длительности сформированных блоком 6 стробов (видеоимпульсов) до длительности полезных радиоимпульсных сигналов ИФРНС. С помощью формирователя 18 импульсов сформированные таким образом видеоимпульсы, длительность и временное положение которых совпадают (за исключением начального участка) с длительностью и временным положением принимаемых полезных (поверхностных) сигналов ИФРНС, поступают на управляющий вход ключа 20. При поступлении на управляющий вход ключа 20 импульсов с выхода формирователя 18 ключ 20 замыкается, а при отсутствии этих импульсов, т.е. в промежутках между принимаемыми полезными сигналами ИФРНС, ключ 20 размыкается. В замкнутом положении ключ 20 пропускает на свой выход сигналы с выхода управляемого генератора 19, обеспечивая работу синхронных детекторов 13, 16 только в момент действия принимаемых сигналов ИФРНС.
генератор 19 формирует на своем выходе синусоидальное колебание с частотой, равной частоте высокочастотного заполнения радиоимпульсов ИФРНС (например, fo = 100 кГц для сигналов ИФРНС Лоран-С), сдвинутые по фазе на 90о по отношению к фазе высокочастотного заполнения радиоимпульса. Синхронизация фазы выходного сигнала генератора 19 осуществляется с помощью стробов, поступающих с частотой следования принимаемых сигналов станции ИФРНС с выхода блока 6, временное положение которых жестко "привязано" к временному положению перехода через нуль напряжения высокочастотного заполнения на начальном участке принятого полезного (поверхностного) сигнала ИФРНС. Возможность синхронизации обусловлена тем, что частота выходного сигнала генератора 19, равная частоте высокочастотного заполнения сигнала ИФРНС, и частота следования стробов, формируемых на выходе блока 6, равная частоте следования принимаемых сигналов передающей станции ИФРНС, находятся между собой в целочисленном соотношении.
С выхода замкнутого ключа 20 сигнал, сформированный генератором 19 с частотой, равной частоте высокочастотного заполнения радиоимпульсного сигнала ИФРНС, сдвинутый по фазе на 90о по отношению к фазе высокочастотного заполнения принятого сигнала ИФРНС, поступает на вторые (опорные) входы синхронных детекторов 13 и 16 в моменты приема полезных (поверхностных) сигналов станции ИФРНС.
На первый (сигнальный) вход синхронного детектора 16 поступают принятые антенной 1 и отфильтрованные блоком 3 фильтрации сигналы передающей станции ИФРНС, а именно полезный (поверхностный) сигнал ИФРНС и составляющая ЕВ отраженного от ионосферы сигнала ИФРНС. Поскольку фаза сигнала генератора 19 сдвинута на 90о по отношению к фазе высокочастотного заполнения полезного (поверхностного) сигнала станции ИФРНС, то в результате их взаимодействия уровень соответствующей составляющей выходного сигнала синхронного детектора 16 равен нулю. Уровень другой составляющей выходного сигнала синхронного детектора 16 определяется амплитудой составляющей ЕВ отраженного от ионосферы сигнала, поступающего на сигнальный вход синхронного детектора 16 с выхода блока 3, и разностью фаз между высокочастотным заполнением отраженного сигнала и сигналом генератора 19. Например, при нулевой разности фаз (это соответствует 90о-му фазовому сдвигу между высокочастотными заполнениями отраженного и поверхностного сигналов) выходной сигнал синхронного детектора 16 максимальный, при 90о-ом фазовом сдвиге (т.е. при совпадении фаз высокочастотных заполнений отраженного и поверхностного сигналов) выходной сигнал синхронного детектора 16 равен нулю.
На первый (сигнальный) вход синхронного детектора 13 поступает с выхода регулируемого усилителя 12 усиленная составляющая ЕГ отраженного от ионосферы сигнала передающей станции ИФРНС, принимаемая антенной 7. На выходе синхронного детектора 13 формируется сигнал, уровень которого определяется амплитудой этой составляющей на выходе усилителя 12 и разность фаз между высокочастотным заполнением отраженного сигнала и сигналом генератора 19 (аналогичного детектору 16). Поскольку фазы составляющих ЕГ и ЕВ отраженного от ионосферы сигнала станции ИФРНС одинаковы, то разница в уровнях выходных сигналов синхронных детекторов 13 и 16 будет определяться только разницей в уровнях самих составляющих ЕВ и ЕГ, соответственно на выходе блока 3 и выходе усилителя 12.
Сигнал, пропорциональный разности уровней выходных сигналов синхронных детекторов 13 и 16, т.е. сигнал, пропорциональный разности уровней составляющей ЕВ на выходе блока 3 и составляющей ЕГ на выходе усилителя 12, формируется в блоке 14 вычитания, на входы которого поступают сигналы с выходов синхронных детекторов 14, 16. С выхода блока 14 вычитания сигнал, пропорциональный указанной разности, поступает на вход интегратора 15, вызывая изменение накопления его выходного сигнала. Этот сигнал поступает на управляющий вход регулируемого усилителя 12. Под действием этого управляющего сигнала коэффициент усиления регулируемого усилителя 12 изменяется до тех пор, пока уровень составляющей ЕГ отраженного сигнала, поступающего с выхода усилителя 12, не сравняется с уровнем составляющей ЕВ отраженного сигнала, поступающего с выхода блока 3.
В результате указанной регулировки усилителя 12 на его выходе из составляющей ЕГ отраженного сигнала формируется компенсирующее колебание, поступающее на компенсационный вход блока 17 вычитания, амплитуда которого совпадает с составляющей ЕВ отраженного от ионосферы сигнала, поступающей с выхода блока 3 на сигнальный вход блока 17 вычитания.
В результате вычитания компенсирующего колебания, поступающего с выхода регулируемого усилителя 12 на компенсационный вход блока 17 вычитания, из суммарного колебания, поступающего с выхода блока 3 на сигнальный вход блока 17 вычитания, осуществляется подавление (компенсация) отраженных от ионосферы мешающих сигналов, излучаемых передающей станцией импульсно-фазовой радионавигационной системы, принимаемых приемной антенной 1 вместе с полезным (поверхностным) сигналом.
С выхода блока 17 вычитания принятые устройством полезные (поверхностные) сигналы передающей станции импульсно-фазовой радионавигационной системы, отфильтрованные от отраженных от ионосферы радиоимпульсов (пространственных помех), поступают на сигнальный выход устройства для дальнейшей обработки. Контроль за формой принимаемых устройством сигналов может при необходимости, например, в случае использования устройства на контрольном пункте ИФРНС осуществляться визуально, например с помощью электронно-лучевой трубки осциллографа, подключаемого к выходу блока 17 (на фиг.1 не показан).
На опорный выход устройства с выхода блока 6 поступают стробы, совпадающие по времени с принимаемыми полезными (поверхностными) сигналами. Эти стробы предназначены для идентификации принятых устройством полезных сигналов станции ИФРНС, поступающих потребителю с сигнального выхода, и для синхронизации осциллографа при контроле формы принимаемых сигналов.
В том случае, когда фазы высокочастотных заполнений принимаемых поверхностных и отраженных сигналов совпадают, выходные сигналы синхронных детекторов 13 и 16 равны нулю и схема автоматической регулировки коэффициента передачи регулируемого усилителя 12 не формирует требуемых для его управления сигналы. При этом компенсации отраженных сигналов в блоке 17 происходит с ошибкой и на сигнальный выход устройства, также как и в прототипе, поступают как поверхностные (полезные) сигналы, так и отраженные от ионосферы сигналы. Однако практически вероятность такой ситуации мала, что позволяет сделать вывод о том, что в преобладающем большинстве случаев отраженный сигнал будет подавляться в устройстве, т.е. будет достигаться цель изобретения.
Из этого следует, что предложенное техническое решение обладает преимуществом перед прототипом. Так, в устройстве-прототипе при приеме поверхностных сигналов передающей станции ИФРНС не подавляются отраженные от ионосферы сигналы этой же станции, т.е. устройство-прототип обладает низкой помехозащищенностью по отношению к отраженным от ионосферы (мешающим) сигналам передающей станции ИФРНС при приеме поверхностных (полезных) сигналов этой же станции. В результате при неблагоприятных условиях приема, когда запаздывание отраженных от ионосферы радиоимпульсов мало, например (30-40) мкс, значительная часть поверхностных (полезных) сигналов поражается пространственными радиоимпульсами. Это затрудняет контроль формы принимаемых полезных сигналов Ифрнс, например при использовании устройства-прототипа на контрольном пункте ИФРНС, а также вынуждает использовать для измерений временного положения принимаемого радиоимпульса ИФРНС его начальный участок, неискаженный отраженным от ионосферы сигналом, где однако уровень сигнала мал, что снижает точность измерений.
В отличие от устройства-прототипа предложенное устройство характеризуется повышенной помехозащищенностью по отношению к отраженным от ионосферы сигналам передающей станции радионавигационной системы при приеме поверхностных сигналов этой станции (в условиях, когда фазы высокочастотных заполнений поверхностного и отраженных сигналов не совпадают). В результате в указанных условиях обеспечивается возможность для визуального контроля формы принимаемых полезных (поверхностных) сигналов станции ИФРНС, а также появляется возможность при измерениях временного положения принятых поверхностных сигналов станции ИФРНС использовать участки сигнала с большими амплитудами. Изобретение позволяет при его использовании на стационарном контрольном пункте ИФРНС повысить точность контроля формы излучаемых станцией ИФРНС сигналов, а также обеспечить более точную оценку синхронизации излучений передающих станций ИФРНС, что в целом дает возможность улучшить характеристики работы импульсно-фазовой радионавигационной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014629C1 |
| ПРИЕМНОЕ УСТРОЙСТВО СИГНАЛА РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2030758C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХИ ПРИ ПРИЕМЕ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027305C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗАДЕРЖКИ РАДИОИМПУЛЬСА ОТНОСИТЕЛЬНО МЕСТНОГО ОПОРНОГО СИГНАЛА | 1991 |
|
RU2012026C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ ПО РАДИОКАНАЛАМ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2079855C1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| УСТРОЙСТВО КОНТРОЛЯ СИНХРОНИЗАЦИИ МОМЕНТОВ ИЗЛУЧЕНИЯ СИГНАЛОВ ОПОРНЫХ СТАНЦИЙ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2012898C1 |
| КЛЮЧЕВОЙ РАДИОПЕРЕДАТЧИК НАВИГАЦИОННОЙ СИСТЕМЫ ДАЛЬНЕГО ДЕЙСТВИЯ | 1994 |
|
RU2079207C1 |
Использование: при определении местоположения подвижных объектов. Сущность изобретения: устройство содержит 2 антенны (1,7), 1 усилитель (2), 2 блока фильтрации (3,9), 2 полосовых фильтра (4,10), 2 блока подавления узкополосных помех (5,11), 1 согласующий усилитель (8), 1 регулируемый усилитель (12), 1 интегратор (15), 2 блока вычитания (14,17), 2 синхронных детектора (13,16), 1 блок формирования совпадающих по времени с принимаемыми сигналами стробов (6), 1 формирователь импульсов (18), 1 управляемый генератор (19), 1 ключ (20). 1-2-4-5-6-19-20-16-14-15-12-17; 7-8-10-11-12-13-14; 6-19-20-16; 6-18-20-13; 5-17; 5-16. 3 ил.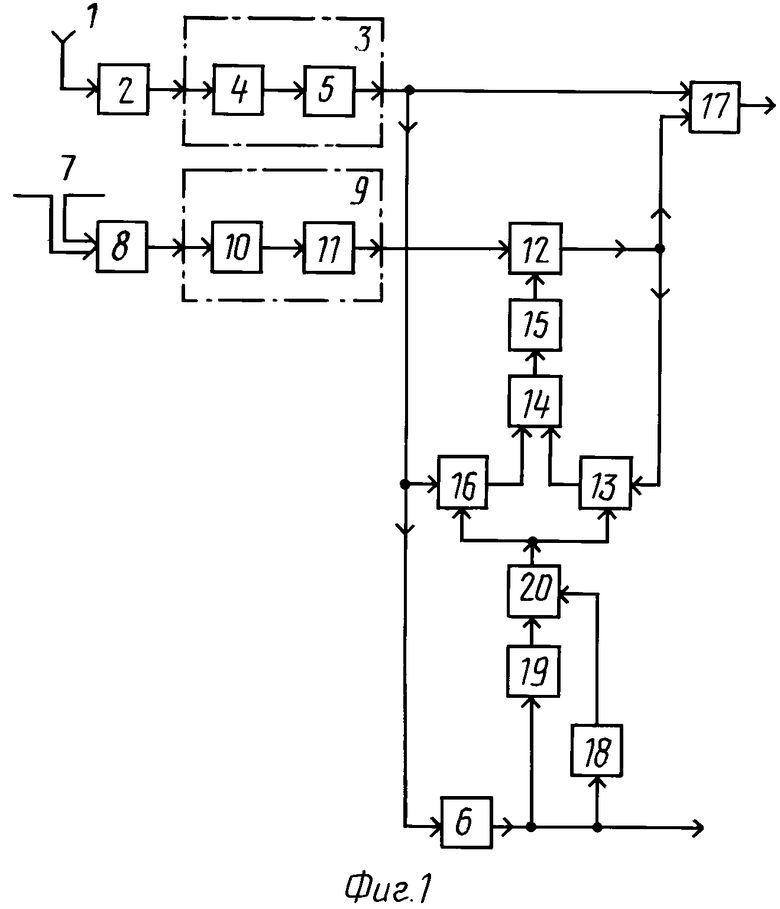
УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ, содержащее последовательно соединенные приемную антенну, усилитель, блок фильтрации и блок формирования совпадающих по времени с принимаемыми сигналами стробов, отличающееся тем, что, с целью повышения помехозащищенности по отношению к отраженным от ионосферы сигналам передающей станции радионавигационной системы при приеме поверхностных сигналов этой станции, введены последовательно соединенные дополнительная антенна, согласующий усилитель, дополнительный блок фильтрации, регулируемый усилитель, первый синхронный детектор, первый блок вычитания и интегратор, выход которого подключен к управляющему входу регулируемого усилителя, второй синхронный детектор, выход которого подключен к второму входу первого блока вычитания, а первый вход подключен к выходу основного блока фильтрации, второй блок вычитания, выход которого является сигнальным выходом устройства, а первый и второй входы подключены соответственно к выходу основного блока фильтрации и выходу регулируемого усилителя, формирователь импульсов и управляемый генератор, входы которых подключены к выходу блока формирования совпадающих по времени с принимаемыми сигналами стробов, ключ, выход которого соединен с вторыми входами первого и второго синхронных детекторов, а управляющий и сигнальный входы соединены соответственно с выходами формирователя импульсов и управляемого генератора, при этом дополнительная антенна выполнена в виде горизонтального вибратора, ось которого совпадает с направлением на передающую станцию радионавигационной системы.
